水鸟式无人艇平台的能量补充系统设计与研究
2019-08-28方子帆郑小伟余红昌谢哲雨何孔德
方子帆 覃 琳 徐 浩 郑小伟 余红昌 谢哲雨 何孔德
(1.三峡大学 水电机械设备设计与维护湖北省重点实验室,湖北 宜昌 443002;2.三峡大学 新能源微电网湖北省协同创新中心,湖北 宜昌 443002;3.三峡大学 机械与动力学院,湖北 宜昌 443002)
无人艇平台作为陆地向海洋的延伸,对于人们进行海洋开发,资源探测,能源补给等活动起到了非常大的帮助,而水鸟式无人艇平台是一类在海洋环境下具有一定搭载功能的可移动式工程装备,作为小型化的海洋工程设备,其具备可移动性,长续航性等特点.因为海洋环境较为复杂,无人艇航行状态下需要较大的能源提供其动力需求,通常这部分能源由蓄电池来提供电能,而在长时间航行中,能源紧缺问题难以避免,因此长时间远距离航行下的小型无人艇平台需要搭载适合其工作环境的能量补充系统[1].
Mc Kinney和DeLaurier教授[2]首次提出了基于沉浮俯仰耦合扑翼振型实现能量采集的新概念,扑翼在流场作用下产生沉浮和俯仰运动,将来流能量流转换成机械能,实现能量采集.Mohammad-Reza Alam教授[3]根据泥泞沿岸的波阻效应,提出了具有粘弹性的“波-能转换地毯”,通过对其系统弹性、阻尼系数实时调节,能量吸收率达到6.5 k W/m2.Rico H.
Hansen和M.M.Kramer等教授[4]利用虚拟弹性元件特性,研究了波浪能采集系统反馈控制理论,对阵列式多浮子采集方式进行了海试研究,其能量转换效率达到70%.邓见和戴滨等[5]对两自由度全被动海流能量采集系统进行数值模拟研究,最高采集效率接近20%.盛松伟[6]设计了一种液压式和直驱式组合的鹰式波浪能发电装置,通过模型试验优化了系统中的参数配置,提高了能量转换效率.
目前海洋无人艇平台的航行动力和探测动力主要依靠蓄电池提供,电池电量较低时无人艇平台无法自行补充电能,需要返航依靠工作人员维护.为此,对适用于无人艇平台的搭载式波浪能利用技术进行研究,提出了一种水鸟式海上无人艇平台的波浪能能量补充系统,利用波浪能采集机构和随机能量转换系统,实现了波浪能的采集、转换、合并以及稳定等功能.
1 水鸟式无人艇平台能量补充系统
1.1 水鸟式无人艇平台能量补充系统工作原理
此能量补充系统搭载于水鸟式无人艇平台上,其能量补充原理为:海洋无人艇平台受到波浪的作用力而产生横摇、纵摇、垂荡等运动,利用波浪浮子收集并获得稳定且可利用的机械能,连杆机构连接液压缸的活塞杆,通过液压传动系统实现能量的传递和稳定,通过液压马达将动能传递给发电机,带动发电机的转子高速旋转发电,最后在蓄电池中存储或者用于电气结构的供能.
图1说明了能量采集与转换系统参数传递关系.水鸟式无人艇平台能量补充系统的组成部分主要为波浪浮子、连杆机构、液压缸、溢流阀、蓄能器、液压马达、永磁同步直流发电机.根据能量流动以及信息传递的方向,将波浪能量采集系统与随机能量转换系统串联设计,形成波浪能到机械能再到液压能的能量流,完成波浪能量的采集与转换过程.
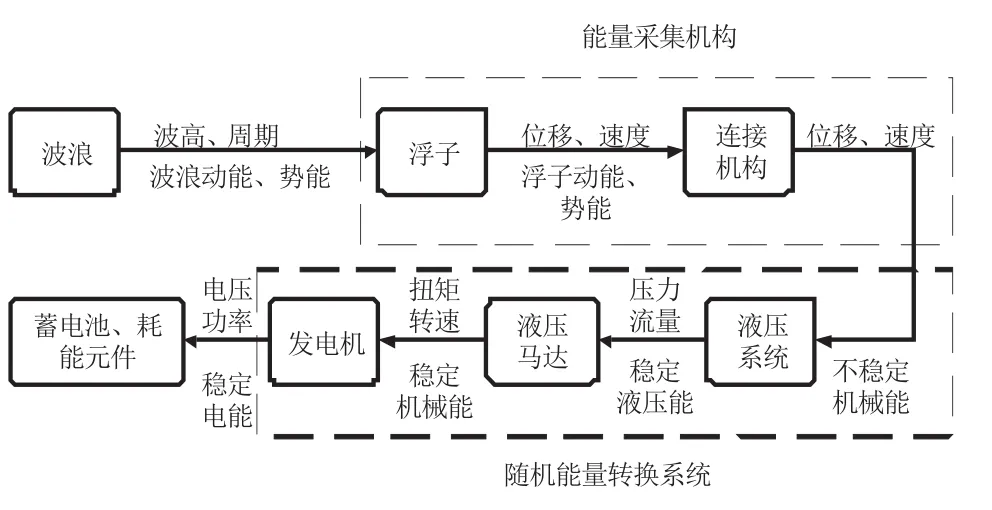
图1 能量采集与转换系统参数传递关系
1.2 波浪能采集机构
水鸟的翅膀结构在运动的流场中会得到升力[7],从而采集能量,扑翼浮子在海水中的运动与水鸟翅膀在空气中的运动情况相似.利用连杆机构模拟水鸟翅膀的运动方式,使扑翼浮子在海水中上下拍动.
作为波浪能采集机构的一部分,四连杆机构具备传递物体的运动与传递波浪力的作用.四连杆机构作为重要的传动部件,其两端连接浮子与液压活塞杆,在几何空间上对机构的布置产生影响,并直接关系液压缸活塞杆的运动情况.
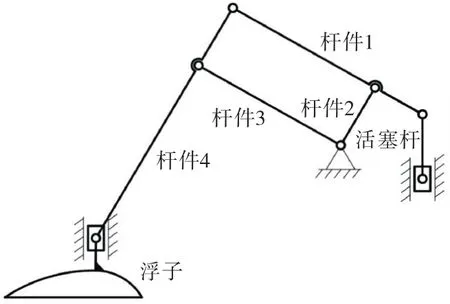
图2 波浪能采集机构工作原理
浮子的往复直线运动带动连杆绕轴转动,连杆的一端与液压缸活塞杆相连,带动活塞杆作上下往复直线运动.
1.3 随机能量液压传动系统
液压传动方式在海洋装备中运用广泛,液压系统布置灵活,相比于机械结构在空间布局上更为合适,液压传动系统在运行时更加稳定,不仅能够实现运动的传动,同时可以方便地实现运动的合并以及元件运动速度的控制.
该液压能量转换系统工作时,信号来源9是液压缸活塞杆1的速度信号和位移信号,实际为浮子的往复直线运动.液压缸1的活塞杆在往复运动的过程中,液压缸向两侧排出液压油,另一个腔体需要补油来平衡液压缸活塞杆左右的压力差,液压油从油箱3中提供,通过单向阀2进行补油.液压缸两个腔体排出的液压油经过止回阀4能够合并到同一液压管道.根据机械结构布局特点,系统需要设置两组液压能量转换装置,两组液压缸受到的力载荷相同,其液压油的流量和压力也基本相同,经过液压管道的合并,利用溢流阀5的稳压特性,设定液压管道压力上限,超过额定压力的液压油将从溢流阀流向油箱,防止系统压力过载.结合蓄能器6对流量的缓冲,达到削峰填谷的作用,同时设置节流阀7,使得液压管道的流量达到稳定,通过液压马达8的转换,液压能将转换为较为稳定的机械能.

图3 液压能量转换系统方案
1.4 系统总体方案
海洋无人艇平台的结构方式有多种.在已知系统结构参数的条件下,利用Pro/E三维建模软件,建立水鸟式无人艇平台能量补充系统的三维模型.波浪能采集机构依靠两个支点铰接于无人艇平台内腔,浮子在海水的作用下上下升沉运动,驱使连杆机构绕支点旋转,连杆机构推动另一端的液压缸活塞杆运动,水鸟式无人艇平台及其能量补充系统三维模型如图4所示.
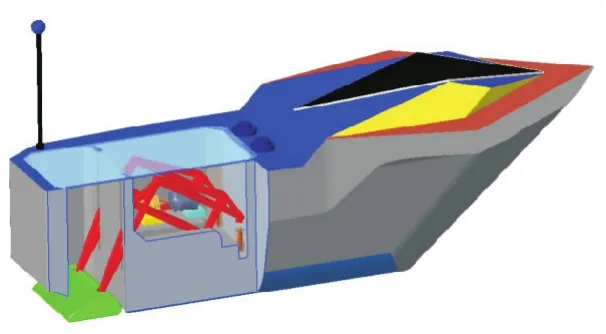
图4 水鸟式无人艇平台及其能量补充系统三维模型
2 无人艇平台浮子的振动模型和波浪力计算
2.1 无人艇平台浮子的振动模型
只对垂荡运动进行分析,当浮子在波浪绕动力FZZ作用下做垂荡运动,可以建立振动数学模型:


式中,D为浮子的重量;g为重力加速度;λZZ为由水的附加质量引起的附加惯性力矩;γ为水的重度;SW为浮子水线面面积.
2.2 海况分析
结合中国南海钓鱼岛海域波浪情况[8],对3种常见海况波浪环境下的物体受力进行分析.表1表示了2、3、4级海况的波浪相关参数.
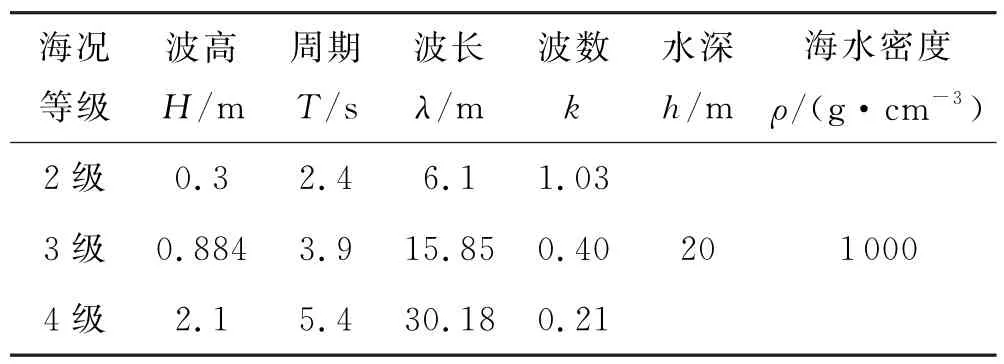
表1 多级海况的波浪相关参数
2.3 波浪力分析模型
利用Matlab软件,建立浮子和船体的波浪力计算模型,计算不同海况下浮子与船体在不同时间所受波浪力.船体底部接近半圆形,在计算波浪力时可作简化处理,将船体视为水平圆柱物体进行计算.借助弗汝德—克雷洛夫(Froude-Krylov)假定法[9],可以计算出波浪对浮子的波浪激励力,水平圆柱浮体上的垂直波浪力为
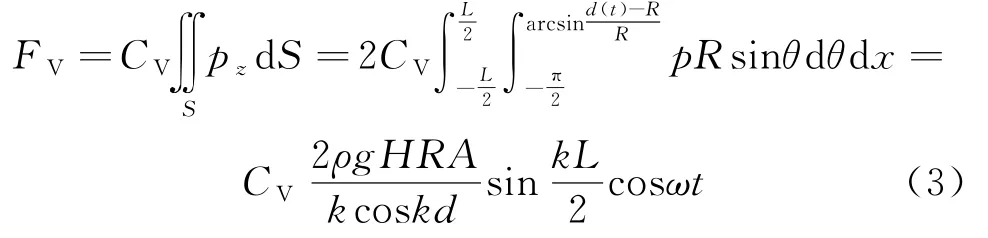
式中:

将浮子结构简化为水平圆柱浮子,其长度L=2 m,半径R=0.5 m.
在Matlab中建立浮体和船体受力方程.为了方便计算,将船体等效为水平圆柱进行计算,并且不考虑船体和浮子之间的相对运动.计算出2级、3级、4级海况下波浪对集中质量m1,集中质量m2,以及浮子m3的综合作用力F(t),F(t)为波浪浮力和物体垂直作用力的总和,详细结果如图5~7所示.

图5 2、3、4级波浪对船体集中质量m 1的作用力F(t)
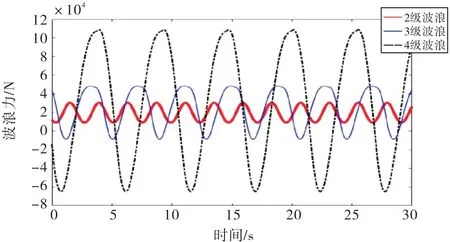
图6 2、3、4级波浪对船体集中质量m 2的作用力F(t)
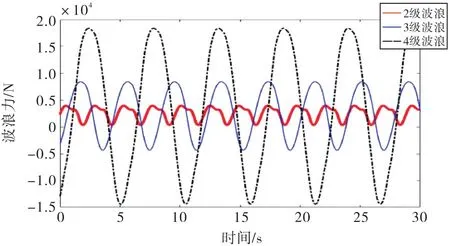
图7 2、3、4级波浪对浮子m 3的作用力F(t)
3 能量补充系统仿真研究
3.1 虚拟样机模型
利用Adams多体动力学分析软件,建立水鸟式无人艇平台及其能量补充系统的动力学仿真模型,如图8所示.
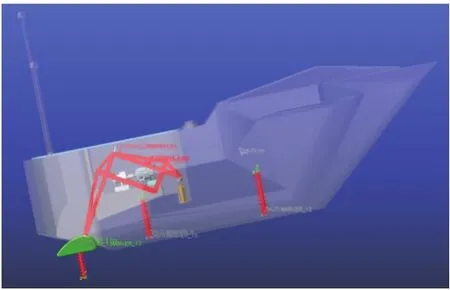
图8 Adams虚拟样机模型
定义各零件质量参数,其中浮子质量200 kg,船体质量3 000 kg,连杆和各连接件质量对系统动力学影响较小,可忽略其影响.由于只考虑船的升沉俯仰运动,把船的前后两端简化为集中质量m1、m2,在浮子质心处设定集中质量m3,在m3以及船体的质量点m1和m2处分别建立拉压弹簧阻尼器单元,设置其对应的刚度系数和阻尼系数.Adams模型详细刚度系数和阻尼系数的详细数据见表2.

表2 Adams模型动力学参数
将Matlab计算结果输入至Adams波浪采集系统动力学模型中.在Adams软件中得到浮子、连杆结构和船体的运动以及受力情况,提取连杆结构与液压缸活塞杆相连部位的速度与位移参数,利用Adams/Contorls接口插件导出Adams数据,将两个输出参数作为AMESim软件的输入参数,输入至AMESim液压转换系统模型中,利用液压回路特性实现能量的换向、合并与稳定过程,最终能量通过液压马达输出,得到液压马达输出转速与扭矩等参数,同时液压缸活塞杆的推力将反馈作用到Adams模型中,对能量采集机构的运动产生影响[10-12].图9为水鸟式无人艇平台能量补充系统联合仿真模型,表3为AMESim模型相关参数设定情况.
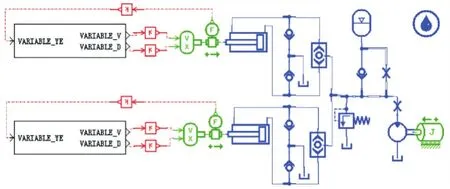
图9 水鸟式无人艇平台能量补充系统联合仿真模型
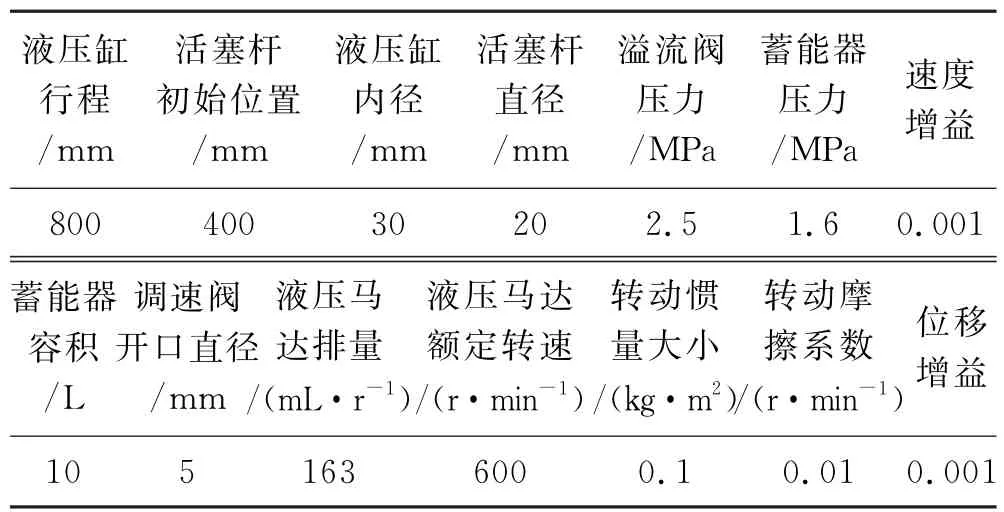
表3 AMESim相关参数设定
3.2 多级海况环境下系统性能分析
为了模拟水鸟式移动平台能量补充系统在现实海浪中的运动,结合我国南海海域常见波浪级别,研究系统在2级,3级以及4级海况下的响应情况,利用虚拟样机技术,可以较为方便地建立水鸟式移动平台能量补充系统仿真模型.
该联合仿真采用Discrete共仿真模型,仿真计算方式为Interactive交互式运行方式,其优点时在联合仿真时能够实时观察机构的运动情况,方便对仿真计算进行监控.为了Adams软件与AMESim联合仿真的误差尽可能减小,需将仿真步长和终止时间设定为与Adams模型中波浪激励力的时间步长相同,设定仿真终止时间为30 s,仿真步长设置为0.1s.图10为多级海况下液压缸活塞杆位移,图11为多级海况下液压缸反馈力.
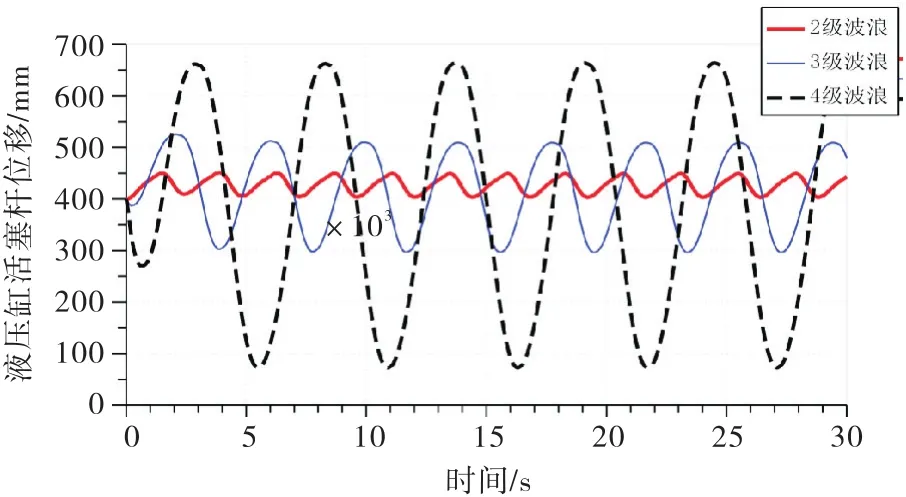
图10 多级海况下液压缸活塞杆位移
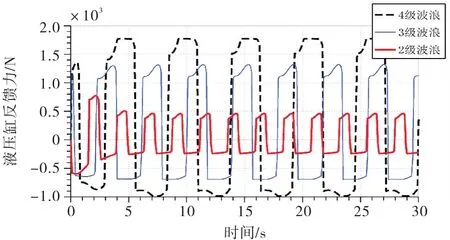
图11 多级海况下液压缸反馈力
在2级海况下,液压缸活塞杆位移在400 mm到450 mm之间;液压缸反馈力在第一个周期较大,达到800 N,之后在400 N至-200 N之间往复变化.
在3级海况下,液压缸活塞杆位移在300 mm到560 mm之间;液压缸反馈力在-600 N至1 300 N之间往复变化.
在4级海况下,液压缸活塞杆位移在120 mm到650 mm之间;液压缸反馈力在-1 000 N至1 750 N之间往复变化.
3.3 系统输出分析和转换效率的计算
3.3.1 系统输出分析
借助Adams/Machinery Motor模块,根据输入电机的关键参数,即可输出电机的转矩和转速,能够较为真实地模拟出电机的驱动效果.
在2级海况下,发电机扭矩稳定在1.7 N·m,发电机转速为152 r/min,感应电动势平均值为4 V,发电机输出功率平均值为26 W.
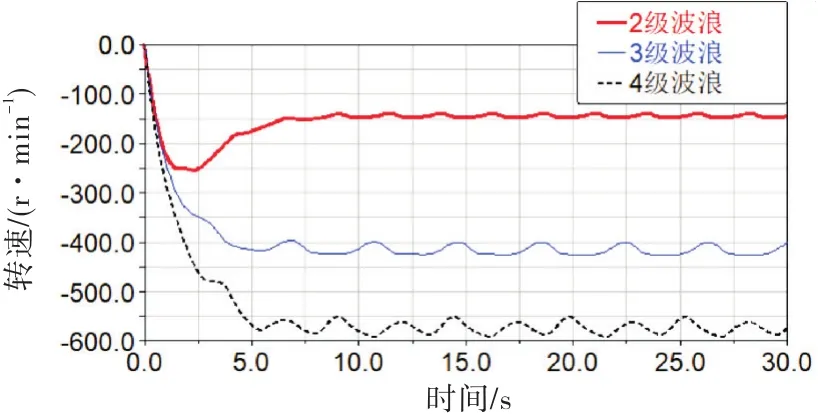
图12 系统发电机转速
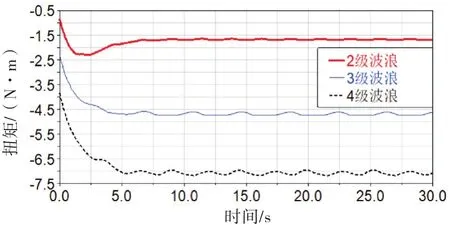
图13 系统发电机扭矩

图14 系统发电机感应电动势
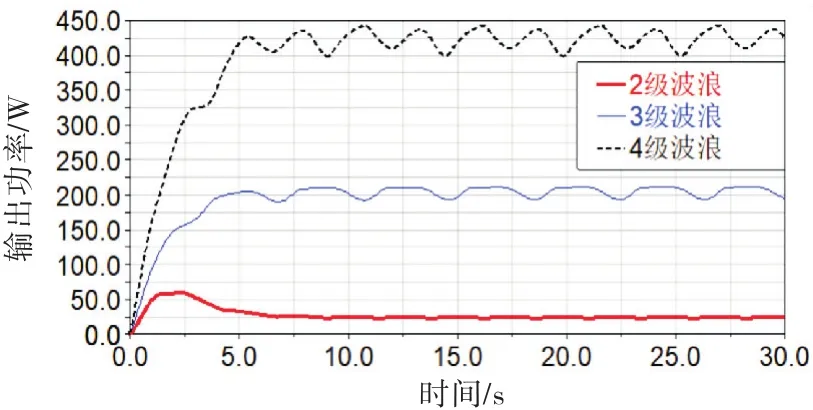
图15 系统发电机输出功率
在3级海况下,发电机扭矩稳定在4.7 N·m,发电机转速为410 r/min,感应电动势平均值为11 V,发电机输出功率平均值为210 W.
在4级海况下,发电机扭矩稳定在7 N·m,液压马达转速5s后较为稳定,并在580 r/min至610 r/min之间周期变化.发电机转速为600 r/min,感应电动势平均值为16 V,发电机输出功率平均值为400 W.
3.3.2 系统能量转换效率的计算
系统的能量转换效率η指的是水鸟式无人艇平台能量补充系统中电能输出功率Po与系统的波浪能采集功率Pi之比,它反映了系统内部工作效率,是系统在不同海况下工作情况的评价指标.系统的能量转换效率η可由以下公式进行计算

发电机的输出功率Po可由Adams发电机模型的仿真结果得到,通过联合仿真模型结果后处理,可以计算出波浪浮子的采集功率Pi.波浪采集机构工作时,波浪能具有的动能以及势能转化为波浪浮子的动能以及势能.在波浪浮子达到位移最高点的时刻,其动能将全部转换为势能,因此求解特定海况下一个周期之中波浪浮子的最大势能,即可求解出波浪在一个周期中对浮子所做的功,在已知波浪周期的情况下,可以求出波浪浮子的采集功率Pi.一个周期内浮子的最大势能Ep(不考虑浮子与船体之间的相对位移)可表示为

式中,hmax为单个周期中浮子的最大位移(m);h0为单个周期中浮子的最小位移(m).
浮子获取最大势能Ep的时间为半个周期,因此浮子的采集功率可表示为

得到不同海况下的浮子位移变化后,便可求出半个周期内浮子获得的最大势能,从而计算出浮子的能量采集功率,进而得到水鸟式移动平台能量补充系统的发电效率.经过计算,多级海况下的发电效率见表4.

表4 多级海况下的系统能量转换效率
从以上结果可以分析出,在2级海况时,波浪蕴含的能量少,浮子采集功率也较低,而此时系统的能量转换效率较低,仅为12.73%,当波浪等级为3级时,系统能量转换效率有了大幅提升,增加至41.95%,而当波浪等级变为4级时,系统能量转换效率出现小幅下降,降低至36.23%.这说明在低海况时水鸟式无人艇平台能量补充系统的能量转换效率较低,而在中海况下系统的能量转化效率较高.
4 结 论
为了解决水鸟式无人艇平台在远距离长时间的动力供给问题,文章提出了一种水鸟式无人艇平台能量补充系统,其中包含两部分,分别是波浪能采集系统与随机能量转化系统.文章采用数值计算与仿真试验相结合的方法,开展波浪能采集机构和能量转换机构设计,动力学建模与分析以及系统动态性能分析,仿真试验等问题研究,为波浪能发电技术的推广与应用提供积极指导意义.