无人机倾斜摄影测量三维建模及精度评定
2019-08-26倪尔瑞
倪尔瑞
(安徽省第四测绘院)
1 无人机倾斜摄影测量技术分析
1.1 无人机倾斜摄影测量技术
无人机倾斜摄影测量技术,是通过在无人机底部安装不同角度的高分辨率摄像头,在同一地点对同一地物进行多角度拍摄,采集大量的地物纹理及其位置信息,然后对每个地物点进行立体成像,最终形成三维立体图,同时获取DEM数据。
与传统的摄影测量技术相比,无人机倾斜摄影测量技术可以获取目标点5个方向(垂直、左视、右视、前视、后视)的影像,并可生成三维实景模型。
1.2 无人机倾斜摄影测量技术的特点
就无人机倾斜摄影测量技术而言,其不仅可以获取目标点的三维坐标和影像信息,而且可以生成三维实景模型,真实地展现目标点周围环境。同时,该技术还具有突出的优势,主要表现在以下几个方面:
①获取的影像具有高精度、高分辨率,能够快速搭建研究地区的二维和三维地理信息;
②生成的三维模型具有可量测性,使得摄影测量的应用范围扩大;
③可采集地物侧面的纹理,在一定程度上降低了三维建模的成本;
④与正射影像三维GIS相比,无人机摄影倾斜技术生成的模型数据量较小,为其共享和发布提供了便利[1]。
2 无人机倾斜摄影技术的三维建模方法
2.1 三维数据的采集
根据相关法律及规范规定,结合测区的实际情况,确定航拍的航高、航飞时间,合理设计航线,从而保障无人机倾斜摄影的质量。
①航高的确定,根据摄影测量的要求,设定适宜的航高,保障影像的质量。
②航飞时间的确定,因航摄时间受天气条件的限制,所以在确定航飞时间的过程中,应尽量选择能见度高、晴天、气流相对稳定的时间进行飞行,从而保障无人机航飞和摄影的有效性。
③航线的设计,根据航空摄影相关规范,合理地设计测区的航线,一般设计为南北向或东西向的直线飞行,如果有特定条件的,应以专业测绘的需要或者地形走向进行航线的设计[2]。当检查出现不合格航片时,应及时补飞,且按原设计航线进行补摄。
2.2 三维数据的处理
通过Context Capture实景建模软件,对采集的数据进行处理,并进行三维建模。建模流程为:
①同步采集无人机数据和地面数据;
②以Context Capture实景建模软件为基础,结合影像的外方位元素,进行全自动空三解算;
③通过智能人机交互技术,实现采集获取影像数据的融合,然后生成一体化的三维模型;
④切分和输出三维模型;
⑤检查和控制数据生产的各个环节,保障成果符合质量要求;
⑥输出数据成果[3]。
3 案例分析
3.1 测区概况
本项目以皖北某平原地区为例,测区面积约1km²,测区内地形高差约7m。该测区的建筑物密度较大,房屋最高可达45m,传统测绘无法有效测绘隐蔽地物点。故采用无人机倾斜摄影测量技术,对该测区进行1:500不动产测绘成图作业。
3.2 具体的实施方案
3.2.1 准备工作
3.2.1.1 航测设备
实验采用大疆M600Pro作为飞行平台,如图1所示,搭载REALCAM524五镜头(1个下视4个倾斜镜头)倾斜相机总像素1.2亿,下视焦距20mm,斜视焦距35mm,为定焦连续拍摄,最小曝光间隔0.8s。
3.2.1.2 航空摄影技术参数设定
此次航空摄影飞行相对高度约为80m,地面分辨率优于0.02m;采用的是五镜头倾斜相机,单镜头2400万像素,相机焦距20mm像元分辨率3.9μm;倾斜像片倾斜角为45°,航向和旁向重叠度控制在75%以上,航向上航线的有效航片要超出成图范围约80m,旁向至少超出范围线一条航线。根据测区的要求和实际情况,航线设计如下图2所示。
3.2.2 像控测量
本实验区布设了25个像控点,像控点间距为200m。在实际的测量过程中,在确保成果质量的前提下,只使用了15个像控点参与加密,剩余的其他控制点作为检查点。在布设像控测量时,应注意以下几点内容:
①像控点全部布设为平高点,以区域网为基础进行像控点的布设,布设的顺序为,先布设目标范围的周边,后布设测区中间地带;
②每平方千米范围内像控点布设数量应在20个以上;
③根据航线计划图和村庄分布进行像控点的布设,保证布点均匀且任意一个自然村应具有5个以上的像控点,使得外围像控点连线可以包裹目标村庄;

图1 无人机设备
④自由图边的像控点,应将其布设在图廓线外。
3.2.3 航空摄影实施
了解当地的气象条件和状况,选择恰当的时间进行航摄,尽量避开大风、雨水天气。就航摄来说,操作人员和机组人员应早到现场,检查维护航摄硬件并使其处于最佳状态,等到合适的航摄时间,按照预先设计的航线进行航空摄影工作,力争在同一架次或相似的气候条件下完成航飞任务。
3.2.4 内业数据处理
就内业数据处理来说,其流程为:以倾斜影像、控制点为基础,重建具有高绝对精度的三维模型;根据重建的三维模型,进行线划图的绘制。本测区的三维模型,如图3所示,具有总体美观、地物清晰的特点,并在三维模型上,通过EPS三维采集软件进行线划图采集,如图4所示。
3.2.5 精度分析
利用全站仪实地采集的界址(房角)点坐标与模型上采集的界址(房角)点坐标反算点位距离,计算中误差,分析其绝对精度;将钢尺实地勘丈的地物边长与采集的地物平面图上量取地物边长相比较,计算中误差,分析其相对精度。

图2 航线设计
3.2.5.1 绝对精度分析
考虑到全站仪设站及观测误差,采用同精度计算中误差,中误差计算公式为:

式中:m为中误差;n为样本个数;△为测量值与真实值之差。
全站仪实地采集界址(房角)点265个,剔除粗差点23个,经统计分析,该检测区域点位中误差为4.2cm,点位距离差值如图5所示。
3.2.5.2 相对精度分析
钢尺勘丈无误差累积,采用高精度计算中误差,其中误差计算公式为:

式中:m为中误差;n为样本个数;△为测量值与真实值之差。
实地勘丈边长158条,剔除粗差13条。经统计分析,该检测区域边长相对中误差为5.93cm,勘丈边长差值如下图6所示。
3.2.6 实验结论

图3 三维模型

图4 成图采集数据
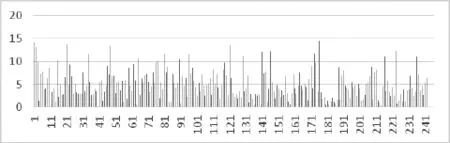
图5 点位距离差值
无人机倾斜摄影测量技术成图精度较高,能满足1:500不动产成图精度要求。
4 结语
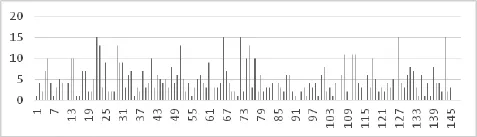
图6 勘丈边长差值
综上所述,无人机倾斜摄影测量技术是现阶段测绘行业的一种新兴的测量技术,无需与被测量物体接触,能够保障测量结果的高精度和有效性,且在一定程度上节约了大量的人力和物力。在该技术的实际运用过程中,应根据待测区域的实际情况,选择恰当的设备,合理规划航测时间和航线,并考虑天气因素,从而保障航测的有效性、可靠性。
