基于飞行试验的无人机气动参数辨识*
2019-08-22亓国栋于剑桥陈方正
亓国栋,于剑桥,陈方正,蒋 军
(北京理工大学宇航学院, 北京 100081)
0 引言
无人机研制过程中,获得其准确的空气动力特性是建立无人机模型,设计优良的无人机控制系统,飞行仿真以及飞行品质评价的重要前提和基础。现阶段无人机气动导数的获取方法主要有三种:理论计算、风洞试验和参数辨识试验。
理论计算法可以大大降低设计周期和研发成本,且有利于多学科优化,但其受计算机性能和不完善的理论研究的限制。风洞试验法相比参数辨识试验法灵活性较大,便于控制并且易于获得数据,但风洞试验相较于其它两种方法费用太高,且存在洞壁干扰和支架干扰的情况。参数辨识试验法直接基于真实飞行数据辨识气动参数和动力学特性,更接近真实物理系统,也是对理论计算和风洞试验的结果进行校验的重要手段。因此参数辨识是获取无人机气动参数的一种有力工具[1]。
文中采用最大似然法进行参数辨识,并利用自适应遗传算法进行优化求解,可以减少传统遗传算法过早收敛和停滞的现象[2]。以某小型串列翼无人机为例,利用其某次程控飞行试验数据,选取飞行轨迹中俯冲段前后的数据,辨识得到无人机的气动导数。对比辨识值和CFD计算的气动导数值,表明辨识算法是正确的,具有良好的实用性。
1 研究对象和数学模型
1.1 研究对象
文中以某串列翼无人机为研究对象,如图1所示,其基本参数如表1所示。

图1 用于飞行试验的串列翼无人机
表1 串列翼无人机参数
参数参数值m/kg1.5Jx/(kg·m2)0.010 2Jy/(kg·m2)0.033 8Jz/(kg·m2)0.024 8l/m0.7S/m0.3
无人机弹射起飞后全程进行自主飞行,包括爬升段、巡飞段和无动力俯冲段,选取俯冲段前后的数据作为观测值进行辨识。飞行数据通过机载设备记录并保存在机载计算机内,采集的数据包括:舵偏角(滚转舵、升降舵)、3个姿态角(滚转角、俯仰角、航向角)、3个角速度(滚转角速度、俯仰角速度、偏航角速度)、3个过载(过载在体轴系上的分量)、GPS速度、经纬度和高度等。
1.2 状态方程
气动力参数辨识的状态方程组由无人机机体系上的六自由度动力学方程和运动学方程组成:

1.3 观测方程
无人机气动参数辨识的观测方程组为:
式中:Nx、Ny、Nz、ωx、ωy、ωz、ϑ、γ分别为过载、角速度在机体轴上的分量以及俯仰角和滚转角的实际观测值;vi(i=1,2,…,8)为观测噪声;F为无人机推力。
1.4 空气动力学模型
气动参数辨识所采用的空气动力学数学模型表达式如下:
式中:α、β、δx、δz分别表示无人机的攻角、侧滑角、滚转角和俯仰角;V表示合速度。
2 辨识算法
2.1 最大似然法简介
气动参数辨识的最大似然法是:对于给定的一组飞行观测数据,选取气动参数,使观测数据的条件概率达到最大值[3]。根据概率论中心极限定理,当观测数据足够多时,可以合理地假定概率密度是正态分布,故参数的最大似然估计就是寻求气动参数,使下列似然准则函数达到极小值:
(1)
式中:v(i)为第i点的新息,即实际观测值与估计值的差;B(i)为第i点的新息协方差矩阵。
选择晴朗天气进行无人机的辨识飞行试验,且气动参数辨识选取被动飞行段的试验数据,系统的过程噪声很小,可以忽略不计,此时似然准则函数可以写成:
(2)
(3)
R为新息协方差矩阵的最优估计。
当测量噪声的统计特性已知时,式(2)相当于以协方差矩阵之逆作为权系数的输出误差法;当测量噪声的统计特性未知时,可根据式(3)求取协方差矩阵的最优估计。在多数动力学系统的试验过程中,不考虑过程噪声的情况下,输出误差法是最为实用、有效的方法[3]。
2.2 自适应遗传算法简介
利用普通的遗传算法[4]进行优化时比较容易出现收敛早或停滞现象,优化的效率和质量将受到影响。而自适应遗传算法当中利用非线性的适应值进行排名选择、自适应变异策略和局部的杂交,并且其利用了优选技术保留之前衍生出的优良个体,可大大减少收敛早和停滞现象的出现,极大地改善了优化的效率和质量[5-6]。
假如优化过程中某个体的选择概率大,那么群体中该个体的数量就越多。为了保证群体中不同适应值个体的数量可以合理分布,设定个体的选择概率是很有必要的。根据个体适应值的大小进行降序的操作来进行适应值排名和选择,并且依据排列的次序来设定被选择的概率。非线性的适应值排名选择按照式(4)设定被选择的概率:
(4)
式中:N为种群规模;q为各进化代中最优个体的选择概率。
局部杂交算子产生后代个体的具体操作为:
{zi|zi=αixi+(1-αi)yi}
(5)
式中:{xi}和{yi}是被选择进行杂交的两个父代个体,αi为[0,1]之间的随机数。
优化过程中较为合理的搜索方式为:小适应值的个体在大范围内进行搜索,大适应值的个体在小范围内进行搜索。自适应变异可以保证大适应值的个体保持一定的稳定性,不会因为变异几率大而轻易的丢失,同时可以使小适应值的个体以大概率发生变异,以此来增加通过变异操作生成优良个体的概率。文中自适应变异算子的操作形式为:假设执行变异操作的父代个体为{xi},使其中的分量xk发生变异,如果xk∈[ak,bk],则变异后的个体为:
(6)
式中:flip表示从0和1中随机选择一个结果;△(T,z)=z(1-rTλ),式中r为[0,1]之间的随机数,λ一般取[2,5],是决定一致性程度的参数 ;T表示变异温度,其可以写成T=1-f/fmax,f表示适应值,fmax表示种群中当前最大适应值。
3 辨识结果与分析
气动力参数辨识采用的数据为串列翼无人机程控飞行数据,选取无人机最后关闭动力俯冲段前后的300个数据点进行辨识。应用自适应遗传算法对无人机飞行试验数据进行辨识,以CFD计算的气动导数作为初值,待辨识参数作为优化设计变量,遗传算法种群规模取50,交叉概率选为0.8,变异概率0.025,最大迭代次数100次。
图2给出了所选取试验数据的舵偏角。

图2 俯仰和滚转舵偏角


表2 气动参数辨识结果
图3中给出了观测量估计值和实际值的对比,从图中可以看出,估计值与实际值符合较好,表明辨识算法是正确有效的。
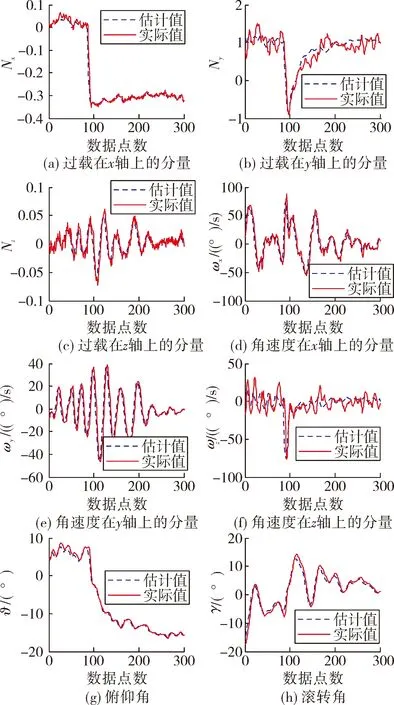
图3 观测量估计值与实际值对比
4 结论
由于飞行试验条件的限制,无法对飞行试验的舵激励信号进行设计。不过通过对飞行试验数据舵偏角的筛选,利用自适应遗传算法与最大似然法结合的辨识算法进行气动参数辨识,从辨识结果可以看出,即使在闭环控制系统的情况下,依然可以得到较为准确的气动参数。考虑到数学模型本质上的通用性,该辨识算法对其他布局的无人机同样适用。通过对真实飞行试验数据进行辨识,证明该算法具有正确性和工程实用性。
