末制导雷达双门限DP-TBD算法的工程实现研究*
2019-08-22谢春思李军玲
谢春思 ,吴 帅 ,李军玲 ,李 强
(1 海军大连舰艇学院导弹与舰炮系,辽宁大连 116018;2 海军大连舰艇学院,辽宁大连 116018; 3 大连大学信息工程学院,辽宁大连 116622)
0 引言
对海面弱、小目标在复杂背景下如何有效搜索跟踪是雷达检测过程中需要解决的关键问题[1-4],传统末制导雷达检测算法往往采用类似的算法架构,如检测后跟踪算法(DBT算法)在强杂波环境下将会丢失很多的信息,无法在控制虚警率的情况下有效检测出需要的目标。后来提出了一个新的算法架构,即检测前跟踪算法(TBD算法)[5]。TBD算法本质上就是利用了目标在时间维度上位置的连续性与相关性,找到在多帧数据间目标位置移动的规律,通常弱、小目标的位置变化是有限的,而强杂波出现的位置是随机的,进行航迹尺度上的联合判决,从而将弱、小目标与强杂波区分开来,达到检测弱、小目标的效果。
TBD算法具有良好的检测效果,对于跟踪-检测的具体实现方式,也有各种不同的方案,例如:基于粒子滤波的TBD算法(PF-TBD)[6],基于动态规划的TBD算法(DP-TBD)[7-9],基于霍夫变换的TBD算法(HT-TBD),等等。其中,基于动态规划的检测前跟踪算法由于性能突出,易于实现,引起了更加广泛的关注。其作为针对弱目标检测的热门候选算法,可明显改善信噪比,得到了广泛的研究[10-11]。其中意大利科学家Grossi提出的双门限DP-TBD算法在各方面都具有一定优势,其算法框架如图1所示,值得进一步研究其工程应用价值。

图1 Grossi双门限TBD算法框架
文中首先通过分析算法的工程难点,并提出相应的解决问题的思路,最终提出一个工程上可实现的DP-TBD算法。并分析了算法的复杂度,从而得到一级门限的选取。
1 DP-TBD工程难点及解决思路
由于目前在复杂背景下的弱、小目标检测问题一直是雷达检测需要解决的关键技术之一,同时随着隐身技术快速发展,这类问题的解决也愈发具有迫切的现实意义。虽然TBD算法在性能上相比于传统算法有明显优势,但其算法本身的特点使工程实现具有不小的挑战,即DP-TBD算法最核心的矛盾就是计算量与实时性的权衡。
DP-TBD算法在运行中主要是在一定的搜索区域内计算多帧最大累计函数F:
z为每一个点迹的一个信号幅度的函数,如信噪比。整个积累过程可以用动态规划的方法实现。
造成计算量大的主要原因是:一是雷达的搜索区域广,即使经过预滤波,需要处理的点迹数量也是很大的;二是相邻两帧之间目标距离长,因此集合D在实际处理中也不容小视;三是新数据对原有积累函数的更新,帧长越长更新次数就越多,同时搜索窗口随着时间推移而向前平移。因此,在工程实现中,合理的动态规划剪枝以及预处理尤为重要。
为了满足实时性处理的需求与数据流的兼容性要求,对DP-TBD算法须进行一定的调整,目标是降低计算量与提高实时性两个方面。
第一是有效利用目标在整个空间中的稀疏特性,采用双门限滤波来提高效率。算法的计算量与虚警概率呈正相关趋势。如果一级门限过低,会造成多帧累计的备选目标点数量增加,即使经过二级门限也会产生更多的虚警点。另一方面,通过后文对双门限进一步的分析发现,一级门限带来的检测概率损失与节省的计算量相比是有好处的。同时检测概率对于一级门限的敏感性也没有计算量与一级门限的敏感性高。除了目标比较弱外,为了保证检测概率不能将第一门限设置太高,一个合适的一级门限选择依然可以在保证算法有效性的基础上大大减少计算量。
第二是尽量紧地约束目标运动。从累计函数的过程可以看出,对于每个点迹的更新比较次数取决于有多少点可以经过一帧的运动到达该点迹位置。如果拥有对目标先验的更多运动信息,如速度、加速度,则可以有效减少不必要的计算。由于末制导雷达精度有限,尤其是方位上分辨率有限,加速度信息可以做出的有效约束不是特别理想。同时引入方向系数α,考虑到目标在运动时更倾向于向前飞行,对于累计函数在运动方位上进行加权,可以在多目标情况中带来更良好的区分近邻多目标的效果。
第三是为了保证搜索窗口可以随着数据到达实时推进,F值的记录也需要为窗口滑动做准备,从而不能记录单一的Fk,l而是需要完全记录Fk,1,l,…,Fk,l,l,其中Fk,m,l代表以k点为终点,第l帧为最后一帧,航迹长度为m帧的一段航迹的累计函数值。显然,原来的Fk,l相当于现在的Fk,l,l。文献[12]中采用的方式是以Fk,l-Fτ1,1作为窗口滑动后的Fk,l-1,牺牲累计过程的最优性来提高计算速度。采用方式会使虚警航迹带来的误差在不断的滑动中不断扩散。因此算法采用了牺牲重复计算的时间来换取滑动窗口的准确性,为了保证算法能够长时间更新且有效,经过权衡还是保留了当前的重复计算。另一方面从复杂度分析可看出,即使具有重复计算,算法的复杂度也是可以接受的。
2 工程实现设计方案
考虑算法与雷达处理流程的兼容性,提出了以下实时DP-TBD算法工程实现模型,DP-TBD工程设计方案算法流程如图2所示。

图2 DP-TBD工程设计方案算法流程
整个工程实现算法流程可分为三部分:到一级门限滤波前为末制导雷达信号处理部分,动态规划累计函数更新部分,航迹输出部分。
算法前两步是常规处理使用的脉冲压缩与MTI,将回波数据转化为DP-TBD算法可以使用的形式。
一级门限预滤波,既可以采用设置固定门限,也可以使用CFAR等恒虚警算法,将大多数杂波滤掉,降低后续计算量。同时保留剩余点的强度信息,进入到接下来的动态规划环节。
动态规划计算累计函数是算法的核心。对于每一帧实时数据首先进行对帧长为1的F值初始化,再确定每个点迹对应的上一帧位置的可能范围,得到多条备选航迹;再对每条备选航迹进行方位系数计算,更新得到该备选航迹的累计函数值;最后取累计函数值最大的一条航迹作为该点迹在当前帧下的航迹,完成了对一个帧长的滑窗更新的过程。为了使滑动窗口可以递延下去,需要对帧长从2到min(m,L) 的所有累积函数值均进行更新。其中长度为L的累计函数值将会作为当前帧的二级门限判决输出,其余长度的累计函数值是为下一个滑窗递推计算累积函数值做准备。
最后是二级门限滤波与航迹融合。当目标比较多、所处位置比较复杂时,二级滤波门限应该随着空间位置变化而改变。因为TBD算法在得到航迹时依然保存着航迹上点迹的幅度信息,因此如果知道了所要观测目标的信噪比的相关信息,就可以有选择性地筛选出目标期望强度附近的累计函数值对应的航迹,从而排除其他目标带来的干扰,这是TBD算法所带来的附加优势。航迹融合的作用则是如前文所述,减少虚警平台上虚警航迹对于目标的干扰,使第二级门限更具有鲁棒性。
3 算法复杂度分析
DP-TBD算法与传统检测算法相比在检测性能上更加优越,但其庞大的计算量也导致应用上受到局限。因此,对于DP-TBD算法需要进行一定的复杂度分析,从理论上说明其可行的条件。就是对于二级门限的DP-TBD算法的整体复杂度进行分析,并通过与同样是基于动态规划的维特比(Viterbi)算法进行比较,得到一个保证实时性的约束条件。
假设雷达搜索平面有M个距离向单元和N个方位向单元,区域内有T个目标。再假设一级门限通过率为a,a≪1,且目标点均可通过一级门限。则平面内经过第一级门限剩余点迹个数为a(MN-T)+T≈aMN+T。累计函数更新部分,假设每个点迹可能通过周围D个单元的范围内更新累计函数值,且假设D个单元内只包含一个目标,那么在搜索单元内经过一级门限剩余a(D-1)+1≈aD+1个点迹。由于为了保证搜索窗口的滑动,对于滑窗内第l帧数据,需要更新(l-1)(aMN+K)(aD+1)个累计函数。设搜索窗口长为L帧,则在搜索窗口平稳(绝对帧数大于L)时,每帧计算次数为(L-1)(aMN+K)(aD+1)/2。考虑到aMN≫K,复杂度可以近似为Θ(aLMN(aD+1))。考虑维特比算法的每帧平均复杂度为Θ(MN),只要满足
则可以从复杂度的角度保证算法的实时性。举例而言,当L=8,D=50,a=0.04,与之前a≪1估计相吻合。
4 单目标检测性能评估
假设采用末制导雷达观测数据,总共19帧数据,每帧间隔为0.5 s。距离向共有6 000个单元,距离分辨率为75 m,方位向为60°~90°,脉冲宽度1.5°。目标运动先验信息包括:最大速度不超过30 m/s,加速度不超过30 m/s2。通过DP-TBD算法得到的单目标检测仿真结果如图3所示。
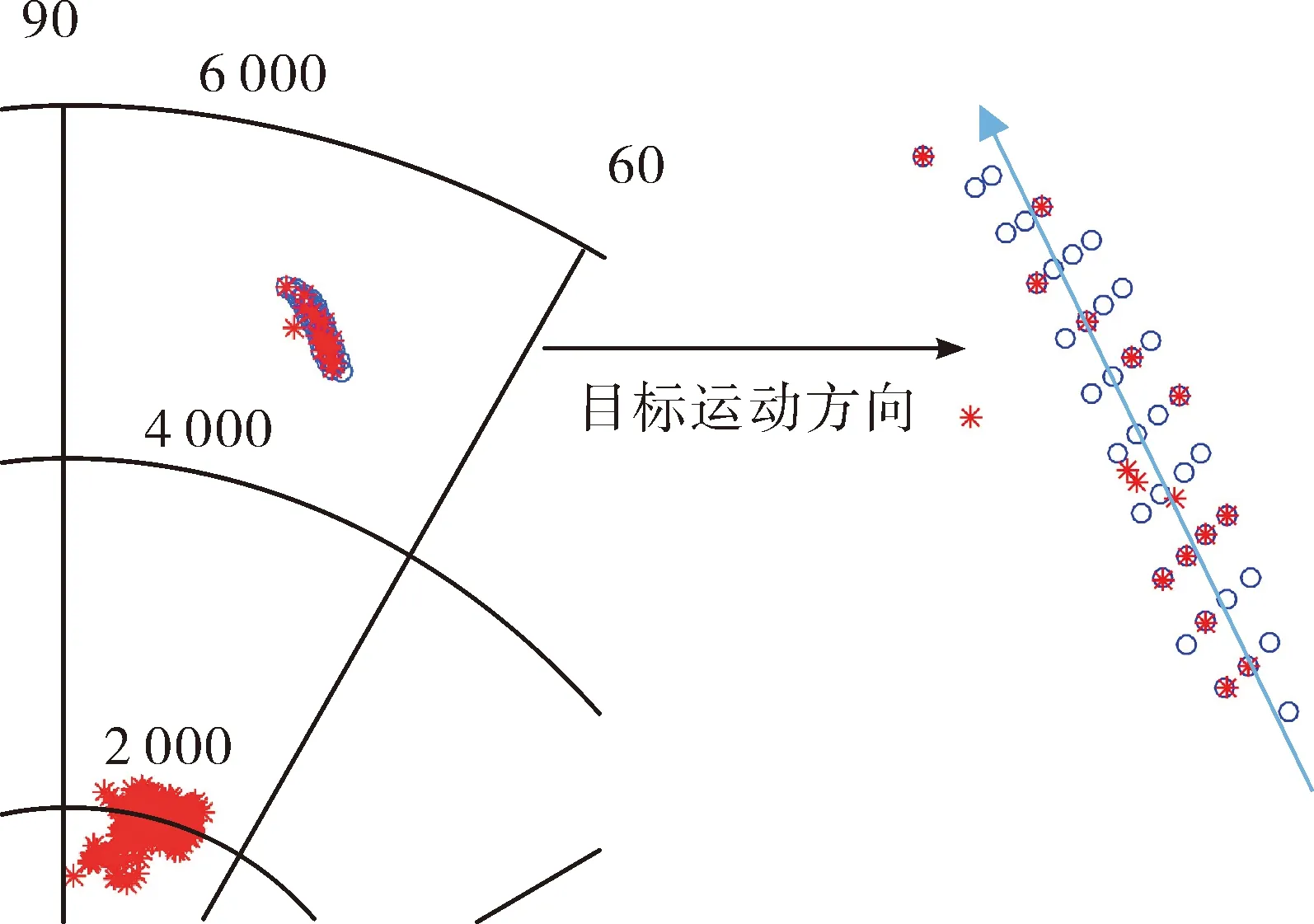
图3 DP-TBD算法得到的单目标检测仿真结果
其中,目标强度在70 dB左右,信噪比在10 dB左右。因为杂波中只有一个目标,所以没有分区域设立门限的需求。一级门限是通过直接进行低门限CFAR,再提取通过CFAR的点的原始幅度信息。二级门限则是使用全区域同一门限,门限的设置也是针对远区信噪比设立的。设置搜索窗口为8帧。
采用击中波束的方位和距离作为目标真实位置的代表,用蓝圈表示。由于目标每帧会被两个波束击中(有一帧为1个),所以总共会有38个蓝圈。星点为检测出的19帧航迹。从图3中可以看出,在远区目标所在的空间里,可以清晰地看到目标被检测到,并且航迹也可以正确跟踪。整体上19帧的数据,有13帧的位置是准确的,有2帧相对真实位置有一定偏差,但整体效果已经足以跟踪到该目标而不受周围的干扰。单目标单帧检测仿真如图4所示,通过图3与图4对比可知,如果只是用单帧检测,可以看到虚警量十分大,已经无法通过检测结果判断何处有目标。
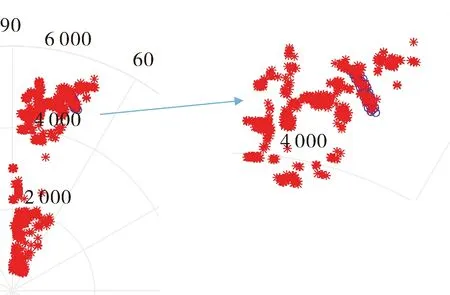
图4 单目标单帧检测仿真
与此同时,近区也出现了一定量的虚警,也验证了在实际情况中,不同距离上的杂波特性是不同的,如果以相同的门限进行判断,则很难选择一个全空间合适的门限。因此,二门限的区域自适性调整可以为算法提供更好的效果。
5 总结
文中围绕DP-TBD的工程技术实现,从问题分析到实际解决进行了讨论。算法的工程实现方案既考虑了与实际末制导雷达系统数据流的兼容性,也考虑了算法的计算量与性能的平衡。算法引入了双门限、运动模型约束和方位系数等方法,从而达到工程实现的需求。同时通过复杂度的论证说明算法具有较好的实际意义。最后使用检验数据,对算法的可行性做出了现实的检测。
