基于dSPACE的“硬件在回路”导弹控制系统设计与仿真*
2019-08-22马清华苗昊春
陈 韵,马清华,王 根,苗昊春,刘 琳
(1 西北工业大学航天学院, 西安 710072; 2 西安现代控制技术研究所, 西安 710065)
0 引言
导弹控制系统是导弹的关键分系统之一,具有功能多,构成复杂,可靠性要求高等特点。近年来,随着计算机硬件、软件技术的突破,机电控制技术的日益成熟,导弹控制系统的设计与仿真技术的发展和应用也提高到一个新的阶段。“硬件在回路”设计与仿真,由于在设计回路中实时引入控制回路的执行机构,与数字回路的设计方法相比,具有更高的真实度,是导弹控制系统设计中置信度最高的一种设计方法[1]。
文中研究了一种基于dSPACE仿真平台的导弹控制系统“硬件在回路”设计与仿真方法,它采用主机+目标机的结构布局,利用MATLAB/Simulink强大的模型建立功能[2],丰富的数学计算功能和dSPACE仿真机成熟的硬件支持能力、高效的代码编译能力,实时的硬件仿真能力,可以高效率、高质量的完成导弹控制系统“硬件在回路”的设计与验证。
1 基于dSPACE的控制系统设计平台
dSPACE实时仿真系统是德国dSPACE公司开发的一套基于MATLAB/ Simulink的控制系统在实时环境下的开发及测试工作平台,实现了和MATLAB/Simulink的无缝连接。dSPACE具有强大的功能,可以很好地完成控制算法的设计、测试和实现,并为这一套并行工程提供一个良好的环境。
在硬件方面,dSPACE系统以高性能的中央处理器板卡为运算核心,利用功能完备的对外输入/输出板卡实现信号的采集和输出;dSPACE的软件环境主要由两大部分组成,一部分是实时代码生成和下载软件RTI,它是dSPACE实时系统与MATLAB/Simulink纽带,通过对RTW进行扩展,可以实时从Simulink模型到dSPACE实时硬件代码的自动下载;另一部分为测试软件,主要是综合试验与测试环境(软件)ControlDesk,用于实时仿真过程中的数据监测及数据记录等。基于dSPACE的“硬件在回路”设计系统结构如图1所示[3]。

图1 基于dSPACE的“硬件在回路”设计系统结构
主计算机主要进行MATLAB/Simulink下导弹控制系统的纯数字离线设计与仿真,同时运行ControlDesk等实验测试软件。dSPACE硬件平台通过局域网与主机相连,通过A/D,D/A接口与舵机相连。舵机是导弹控制系统的执行机构,通过执行舵指令驱动舵翼偏转,在导弹飞行过程中产生控制力及控制力矩。通过上述dSPACE平台的搭建,将舵机实物引入导弹控制回路的设计与仿真中。
2 控制系统在线设计流程
基于dSPACE的 “硬件在回路”设计流程如图2所示。主要的流程包括[1]:
1)建立导弹控制系统模型,参数在线设计时是简单的回路设计模型,系统验证过程时是完整的导弹六自由度仿真模型;
2)基于MATLAB/Simulink进行控制系统分析及离线仿真;
3)利用MATLAB实时工作库(RTW)与dSPACE系统的实时接口库(RTI),定义算法及I/O接口;
4)编译后自动生成目标程序代码,下载到dSPACE系统中;
5)结合ControlDesk等工具软件,对控制回路运行过程的实时监控、参数在线修改、数据捕获及与上位机的实时数据通讯,实现“硬件在回路”的设计与仿真。

图2 基于dSPACE的“硬件在回路”设计流程
3 舵机模型辨识
3.1 舵机辨识基本原理
舵机作为导弹控制系统的执行机构,结构中存在齿轮传动机构,即在控制回路中代入传动机构的间隙这一非线性因素,由于加工精度和装配上的限制,间隙往往是难以避免的。
间隙特性对控制系统性能的主要影响:一是增大了系统的稳态误差,降低了控制精度,这相当于死区的影响;二是使系统过渡过程的振荡加剧,甚至使系统变为不稳定。间隙过大,蓄能过多,将会造成系统自振。因此舵机模型的准确性直接影响控制系统的设计结果。
因此在控制系统设计之前,基于dSPACE系统进行舵机模型辨识,在典型输入特征信号的条件下建立更精确的舵机数学模型,为控制系统设计提供更为准确的被控对象,提高控制系统设计效率。
舵机模型辨识原理如图3所示,运用频率响应测试来确定舵机系统的数学模型[4-5]。

图3 舵机模型辨识原理框图
在RTI模块中选择相应的板卡作为舵机的I/O接口,舵机实物的指令输入端、舵反馈输出端与实时接口相连接,建立舵机RTI模型和模型辨识Simulink模型,如图4、图5所示。将舵机模型辨识Simulink模型下载至dSPACE系统中,给舵机RTI模型输入标准信号通过ControlDesk实时监控测试过程、采集数据。

图4 舵机RTI模型

图5 舵机测试模型
3.2 舵机模型辨识结果
给舵机输入典型的正弦波信号A0sin(2πft),根据舵机输出信号,处理该频率f特性下幅值衰减和相位延迟。对比舵机响应信号的幅值A1和输入信号的幅值A0,可以得到舵机在该频率下的幅值衰减为:
(1)
在半个周期内的增区间或者减区间,分别读取幅值相等时输入信号对应的时刻t0和舵机实际响应对应的时刻t1。因为输入信号的频率为f,则输入信号的周期为t=1/f,可以计算出该频率特性下舵机的相位滞后为:
(2)
设置多个频率点获取舵机在不同特性信号下的幅值衰减、相位延迟,将测量结果及对应的不同频率点代入MATLAB辨识工具可获得舵机初步辨识模型,表示为:
(3)
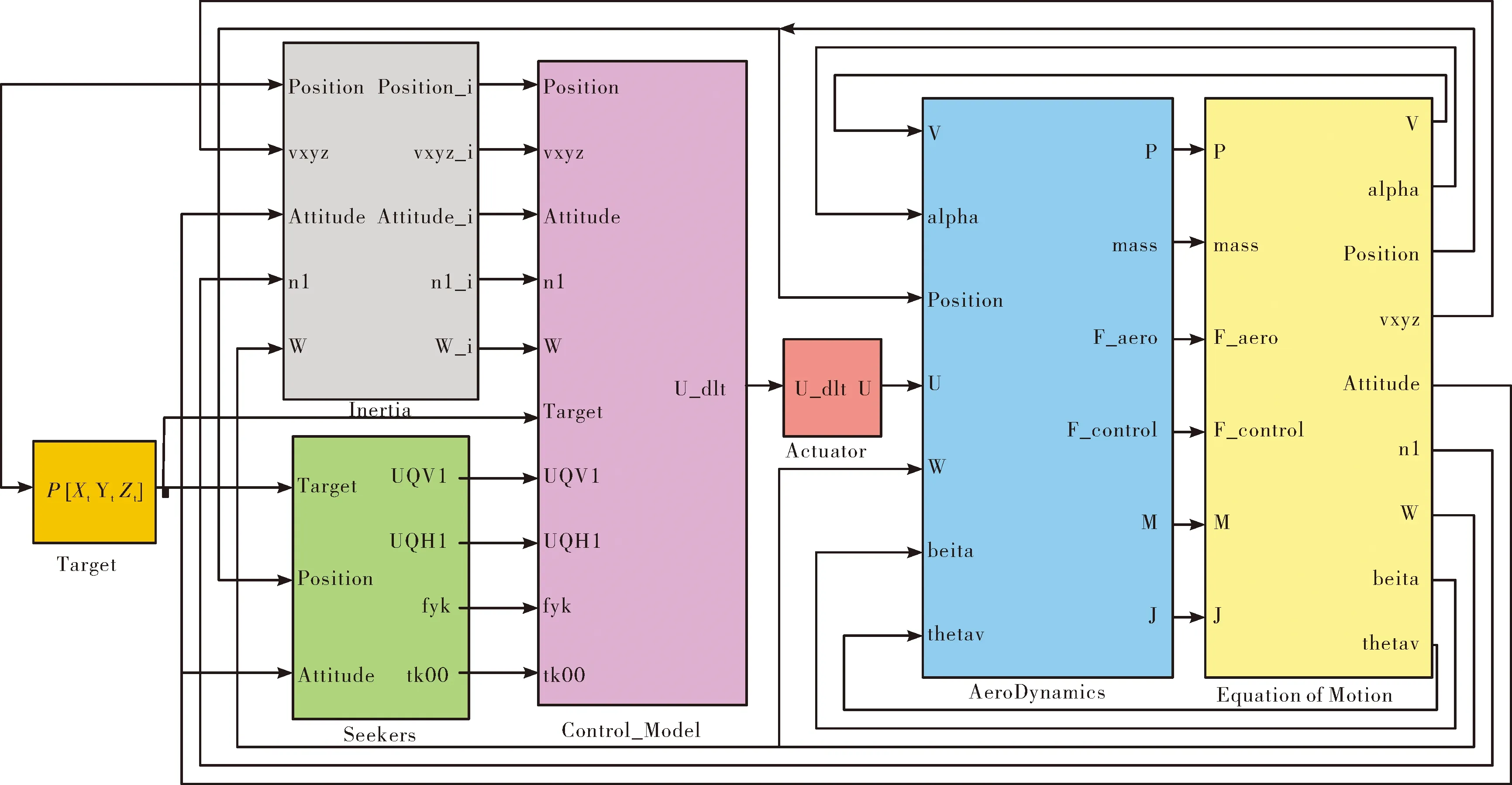
式中m 此时获得的舵机辨识模型在高频段仍然含有较大误差,为了获得更为精确的辨识结果,需要进一步采用权重因子法对舵机辨识模型进行优化。舵机模型式对应的频率响应可写成: (4) 由于求解的模型参数为已知,则根据给定的频率点ω,可解得系统拟合误差为: E(ω)=ε(ω)D(ω)=G(jω)D(ω)-N(ω) (5) 由此,可进一步解得回归分析评价函数: (6) 由于高频数据对于辨识结果的求取影响很小,导致高频段辨识效果较差。为了提高算法的高频辨识精度,可在上述公式基础上引入合适的权重因子来改善算法在高频段的辨识性能。式(6)可改写为: (7) 可以看出,在高频段当ω取值较大时,K值越大。而σ取值较为灵活,ω不变时,取值越大对辨识参数的影响也越大。对J求各未知系数的偏导数,并进一步由偏导数公式很方便地求解出舵机模型未知参数。经测试分析计算,某舵机数学模型可表示为: (8) 以某导弹过载自动驾驶仪设计为例,进行“硬件在回路”设计与仿真研究。比例导引过载驾驶仪回路结构如图6所示,这是目前国内外导弹控制系统中广泛采用的线加速度计+速率陀螺的控制方案。 图6 过载驾驶仪回路结构图 过载驾驶仪回路由阻尼控制回路和过载控制回路组成。速率陀螺测量角速度量,通过阻尼控制器组成阻尼控制内回路;线加速度计测量过载信号作为反馈,通过过载驾驶仪形成制导外回路。 利用MATLAB实时工作库(RTW)与dSPACE系统的实时接口库(RTI),定义算法及I/O接口,将舵机实物引入设计与仿真回路。舵机的输入输出均为模拟信号,建立舵机RTI模型如图4所示,dSPACE系统通过D/A接口给舵机发送模拟指令,并从A/D接口采集舵机电位计反馈信号。用舵机RTI模型代替三阶数字模型,建立过载驾驶仪回路RTI模型,如图7所示。将该模型编译后生成目标程序代码,下载到dSPACE系统中进行“硬件在回路”控制系统设计。 图8给出了基于ControlDesk软件的控制系统在线设计试验监控界面,“试验管理器”控制仿真过程的启动、暂停与结束;将需要设计的参数关联为可调滑块,如图中的“硬件在回路”参数编辑器部分,根据实时响应曲线调整控制器的参数,直至系统响应满足要求。由于真实的舵机与数字舵机模型之间有差异,硬件在回路的阶跃响应结果与离线设计结果有差异,需要对控制参数进行优化设计。实时调整控制参数,在控制器1~控制器4 的作用下,控制回路的阶跃响应有较明显的区别,其中控制器1的作用结果是系统快速性好,但有较大的超调量且调节过程长;而在控制器4的作用下系统响应慢,没有超调量,为过阻尼系统;控制器3的超调量及快速性能较好的满足系统要求。 图7 过载驾驶仪回路RTI模型 图8 “硬件在回路”过载自动驾驶仪设计试验监控系统 建立某导弹六自由度MATLAB/Simulink模型,如图9所示,采用模块化的设计思路,包括空气动力模块(AeroDynamics)、运动方程模块(Equation of Motion),制导控制模块(Control _Model)、惯性导航装置模块(Inertia)、目标模块(Target)、导引头模块(Seekers)、舵机RTI模块(Actuator,内部结构如图4所示)。 图10给出了基于ControlDesk软件的导弹“硬件在回路”六自由度全弹道仿真试验监控系统,可实现仿真曲线的实时监测与仿真数据的采集存储。 文中研究了基于dSPACE的导弹控制系统设计平台,给出系统结构及设计流程,结合舵机模型辨识、RTI模型建立及目标代码生成、导弹控制系统建模,最终实现硬件在回路的导弹控制系统设计与仿真,将执行机构实物舵机引入导弹控制回路的设计过程中,实现了从传统的数字离线仿真过程到“硬件在回路”的设计与仿真,克服了传统纯数字仿真不能真实代表实际系统的缺点,提高了导弹控制系统设计的工作效率及可靠性。 图9 导弹六自由度MATLAB/Simulink模型 图10 “硬件在回路”六自由度全弹道仿真试验监控系统
4 “硬件在回路”设计与仿真
4.1 “硬件在回路”过载自动驾驶仪设计



4.2 “硬件在回路”六自由度全弹道仿真
5 结论