针对卫星动中通伺服系统辨识的输入信号设计*
2019-08-22宋钦良贾维敏江弘杰
宋钦良,贾维敏,袁 丁,江弘杰
(火箭军工程大学, 西安 710025)
0 引言
卫星动中通系统是一种广泛应用于现代战争通信、自然灾害应急通信、治安管理通信等的宽带移动通信系统。卫星动中通系统除拥有传统的固定式卫星通信的优点外,还可以在载体运动过程中实时与卫星进行通信。卫星动中通伺服系统正是支持其在运动中时刻与卫星对准的关键系统之一[1]。
随着卫星动中通技术的广泛应用,为适用不同领域的需求,使得动中通天线口径大小不同,从而导致了伺服系统的负载不同。而伺服系统的参数整定效率严重制约了动中通整机系统的研发和调试效率,因此提高动中通伺服系统的通用性是非常迫切的。
在卫星动中通伺服系统中引入系统辨识,一方面可以提高动中通系统的研发效率,大幅度降低调试时间;另一方面,基于系统辨识结果,可以获得更好的控制参数,从而提高控制效果[2]。由此可见,对伺服系统进行辨识在提高系统的通用性和控制性能等方面具有重要的意义。
1 动中通伺服系统设计方案
针对卫星动中通伺服系统功能的设计需求,本方案主要以STM32F407嵌入式系统为核心,实现信息交互、系统辨识以及对整个控制器的控制功能;通过电流传感器和角速度传感器采集相关信息,并存储在EEPROM中,作为系统辨识的直接依据;使用LM5018实现降压功能,对外界输入的介于20 V到75 V之间的电压都能直接降至15 V,并进一步降压至5 V,为整个系统提供稳定的电源。本方案硬件结构如图1所示。
2 最小二乘法系统辨识的原理
系统辨识的本质是通过对系统输入和输出信号的分析,获得能够在最大程度上反应系统特性的数学模型。在系统辨识和参数估计领域,最小二乘法已经是一种基本的重要估计方法,其既可以应用于离线辨识也可以应用于在线辨识;且利用最小二乘法原理拟定的辨识算法在实施上比较简单,适合应用在嵌入式系统中[3]。
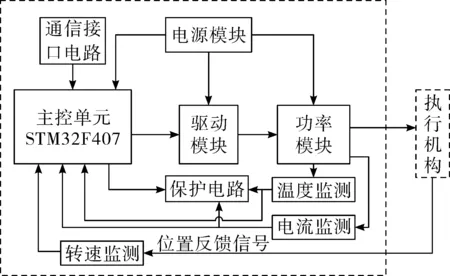
图1 系统硬件结构图
对于一个含有噪声的单输入单输出系统,其差分方程可以表示为:
y(k)=ψT(k)θ0+e(k)
(1)

为了采用最小二乘法进行参数估计,利用式(1)构建如下模型:
Y(N)=ψ(N)θ+ε(N,θ)
(2)
式中:
Y(N)=[y(n+i)y(n+i+1) …y(N+i)]
(3)
ψ(N)=[ψT(n+i)ψT(n+i+1) …ψT(N+i)]T
(4)
θ=[a1…anb1…bn]T
(5)
(6)

(7)
通过对式(7)求解,可获得系数矩阵的结果为:
(8)
另外,利用最小二乘法进行系统辨识所需的数据相对较少,只需保证N-n+1>2n即可实现系统参数的辨识,其中n为被辨识系统的阶数。在此前提下,有效数据越多,其辨识结果越精确。
3 卫星动中通伺服系统辨识输入信号的选择
在使用最小二乘法辨识时,通常选用伪随机M序列作为输入信号,单纯从算法效果的角度来分析,辨识结果能很好的反映真实系统的基本特性。但对于卫星动中通伺服系统来讲,由于伺服系统所驱动执行机构(直流力矩电机)的性能参数差异较大,特别体现在电机的死区方面和减速齿轮之间的齿隙问题,使用M序列作为系统的输入时,对于不同的电机需要进行特别的分析讨论,否则,极有可能使得采集到的大多数数据落在电机转动的非线性区间中,对辨识结构造成难以估计的错误。
出于工程实践的需要,在卫星动中通伺服系统中,我们希望进行系统辨识时所设计的输入信号尽可能简单且易于产生。然而由于最小二乘法算法具有一定的特殊性,直接使用某一固定电平(即常值序列)作为输入信号时,该算法无法获得数值解,因此需要通过分析最小二乘法对输入信号的要求,设计出简单且合理的输入信号。
3.1 最小二乘法对系统输入信号的要求
[yu]
(9)
(10)
根据正定矩阵的性质,要求ψTψ正定,则必须保证uTu正定。这个条件称为n阶持续激励条件,很明显,当{u(k)}为常值序列时,uTu为奇异阵,不满足持续激励的条件[4]。
3.2 阶跃信号用作为最小二乘法输入时的限制条件
实质上,我们更希望使用阶跃信号作为系统的输入信号。一方面,阶跃信号便于产生,仅需确定阶跃点和信号幅度就可以完全确定阶跃信号的全部数据;另一方面,只要阶跃信号的幅值不超过伺服系统中直流电机的额定工作范围,电机始终工作在一个逐渐加速至稳定运行的过程中,采集到的数据可靠性更高。
对于阶跃信号通常可以表示为:
(11)
卫星动中通伺服系统为典型的二阶系统,对于二阶系统,n=2,令i=1,可以得到:
(12)
将f代入可以得到:
(13)
当K=0或N-K-1=0时,f为常值序列,显然不满足持续激励条件。当K≠0且N-K-1≠0时,有
(14)
很明显,uTu正定。即阶跃信号在不全为0或者全为1时,满足作为二阶系统的持续激励条件,可以用作二阶系统使用最小二乘法辨识时的输入信号。
下面分析n(n>2)阶系统,同样取i=1可以得到:
(15)
将f代入可以得到:
(16)
进一步可以求得:
(17)
对于式(17)进行初等变换可以得到[5]:
(18)
显然uTu正定。当然以上表示方式未包含矩阵中有全0行和全1行时的两种特殊情况。对于这两种特殊情况,必须另作讨论。
当矩阵中存在全0行时,可以很容易的求得,uTu中必定存在全0行,从式(16)可以得到,此时恰好满足条件N-K-n+1=0,即K=N-n+1,那么通过计算式(17)不难发现,此时的uTu最后一行和最后一列均全为零,不满足uTu正定的条件;当矩阵中有且仅有一行全1行时,从式(16)可以得到,此时恰好满足K-n+1=0,即K=n-1,此时uTu经初等变换后仍适用于式(18),即满足uTu正定的条件;当矩阵中有两个全1行时,uTu可以表示为:
(19)
(20)
显然uTu中有两行完全一样的数据,即uTu不满足正定条件。同理可以证明,当矩阵中有n(n>2)行全1行时,uTu中将会含有n行完全相同的数据,即当矩阵中具有两个或两个以上的全1行时,uTu不满足正定条件。
通过以上证明了解到,使用最小二乘法进行系统辨识时,可以使用满足特定条件的阶跃信号作为系统的激励信号。这个特定条件可以描述为:
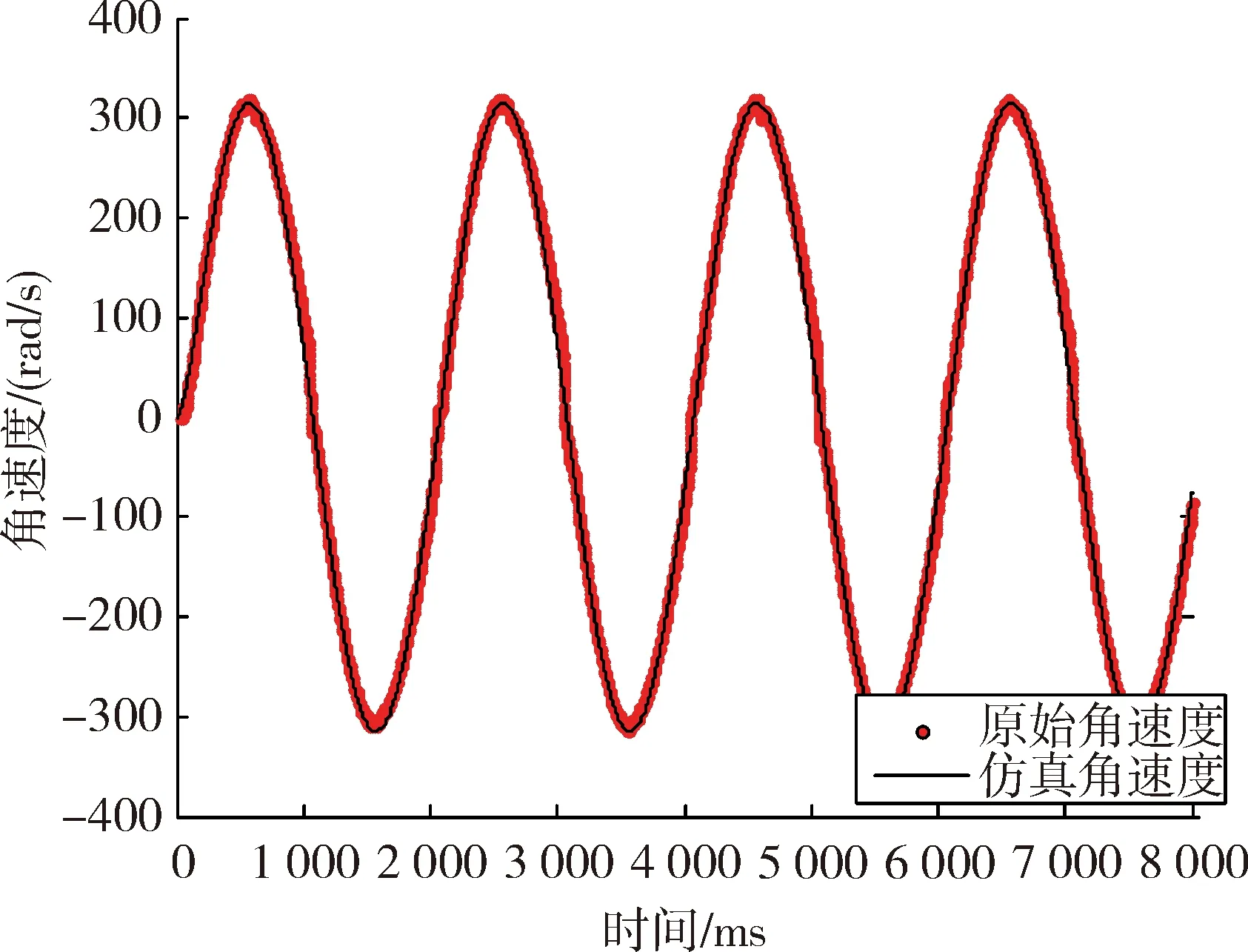
在对激励信号进行采样后,阶跃信号中代表低电平的点数K与系统阶数n以及用于系统辨识的点数N(N>3n-1)之间满足n-2 卫星动中通伺服系统通过执行机构保持天线的指向不变。系统中的平板阵列天线结构经过严格配比,属于稳定平台。执行机构为直流力矩电机。 由于伺服系统的负载经过了严格配比,并设计有轴承系统和滑环系统,因此其数学模型中的负载是恒定不变的,其传递函数关系式可以简化为[6]: (21) 式中:Ta=La/R为电机的电磁时间常数;TM=(GD2R)/(375CeCTΦ2)为电机的机电时间常数;C′e=CeΦ60/2(π),Ce为电势常数。 由理论分析得到系统的数学模型传递函数如式(21)所示,为了便于计算,进一步将系统的传递函数转换为系统差分方程为[7]: y(n)=a1y(n-1)+a2y(n-2)+b1u(n-1) (22) 在上述差分方程中待辨识的参数矩阵为: θ=[a1,a2,b1]T (23) 系统采样频率为5 000 Hz,电源电压24 V。系统输入的阶跃信号前0.008 s(对应当前采样频率为前40个点)为0,之后为占空比36%的脉宽调制信号,采样时间为1 s。输入信号的波形如图2所示。对比前面得出的结论,此时N=5 000,n=2,K=40,很明显,满足n-2 使用卫星动中通伺服系统直接进行系统辨识,中间不需要外界干预,辨识结束后通过串口将辨识结果和为系统辨识采集的数据上传至上位机,以便对辨识结果的精度进行分析。经辨识获得的参数矩阵为θ=[1.409 8,-0.416 0,0.271 3]T。将辨识所得的差分方程模型转换为传递函数: (24) 通过系统辨识,我们得到了卫星动中通伺服系统的数学模型,但是模型是否能够真实的反映出系统的特性还需要经过验证。通常,模型验证时会分别选择阶跃信号和正弦信号作为输入,然后比对系统实际输出和模型仿真输出的响应曲线,如若二者非常接近,则说明辨识结构的数学模型较为真实地反映了被辨识系统的基本特性。 4.3.1 阶跃信号的验证 由于系统辨识时使用的输入信号为阶跃信号,因此不需要再做额外的实验,可以直接比对系统输出的原始数据曲线和模型仿真的输出数据曲线,结果如图3所示。 图3 原系统与辨识模型的阶跃响应对比 从图3中可以看出原始数据由于采样时量化过程存在的量化误差和干扰,数据离散程度比较严重,但是数据几乎都均匀地分散在仿真数据的上下两侧,这说明模型是可靠的,辨识结果是可信的。 4.3.2 正弦信号的验证 给定输入信号为正弦信号,周期为2 s,采样频率为1 250 Hz,采样时间为8 s。模型的正弦响应仿真曲线和真实系统的正弦响应采样数据如图4所示,可以看到,原系统与辨识结果的数学模型仿真结果的响应曲线基本一致。 文中主要对在卫星动中通伺服系统辨识中,基于最小二乘算法采用的输入信号设计进行了探讨,得出了基于该算法使用阶跃信号作为输入所必须遵循的限定条件。并使用满足该限定条件的阶跃信号作为输入,对卫星动中通伺服系统进行模型参数的辨识,得到了较为精确的辨识结果。最后用正弦信号对辨识模型进行验证,证实了辨识结果是可信的。 图4 原系统与辨识模型的正弦响应对比4 辨识算法仿真与验证
4.1 系统模型
4.2 模型参数辨识
4.3 辨识结果分析与验证

5 结束语