新型电磁反后坐装置运行机理研究与仿真分析
2019-08-13郭保全朱家萱毛虎平
黄 通,郭保全,朱家萱,丁 宁,张 彤,毛虎平
(中北大学 a.机电工程学院; b.军民融合协同创新研究院;c.仪器与电子学院; d.能源动力工程学院, 太原 030051)
火炮作为一种常规压制性武器,在现代战争中依然扮演着无可替代的重要角色。反后坐装置被称为火炮的“心脏”,是整个火炮系统的核心部件,承担着减小火炮发射时受力,完成火炮后坐复进运动的重要任务[1]。为了适应未来战争的需求,实现现代火炮高威力、高机动的发展,新型反后坐装置作为一项关键技术受到了国内外研究学者的广泛关注[2,3]。
传统的反后坐装置多为液体气压式的,主要是利用液体通过流液孔产生压力差形成液压阻力,为了实现理想的后坐阻力规律,学者们针对流液孔面积的变化规律进行了多方面的分析和优化研究[4]。以南京理工大学和西北工业大学为代表的相关高校开始研制以磁流变技术为代表的后坐阻力可控的新型反后坐装置[5];相关学者也开展了电流变液体制退机的相关研究,并取得了一定的研究成果[6];为了减少温度对反后坐装置性能的影响,相关学者开始对弹性胶泥缓冲器在火炮反后坐装置上的应用展开研究[7],但试验效果不是很好。
为了简化火炮结构,实现对后坐阻力的实时控制,以产生理想的后坐阻力平台,本研究提出并设计了一种集制退,复进和复进节制为一体的新型电磁反后坐装置,建立了电磁反后坐装置的数学模型,并基于Maxwell电磁学有限元仿真软件进行仿真分析,探究了电磁反后坐装置的动力学特性和能量转换特性。
1 电磁反后坐装置运行机理
电磁反后坐装置主要是根据电磁作用原理设计的一种完成火炮后坐复进运动的装置,根据电磁感应原理的可逆可调特性实现制退、复进和复进节制的作用,其工作原理如图1所示。根据火炮后坐运动特性,电磁反后坐装置的运行状态可分为3个阶段:制退后坐阶段,复进阶段和复进节制阶段。
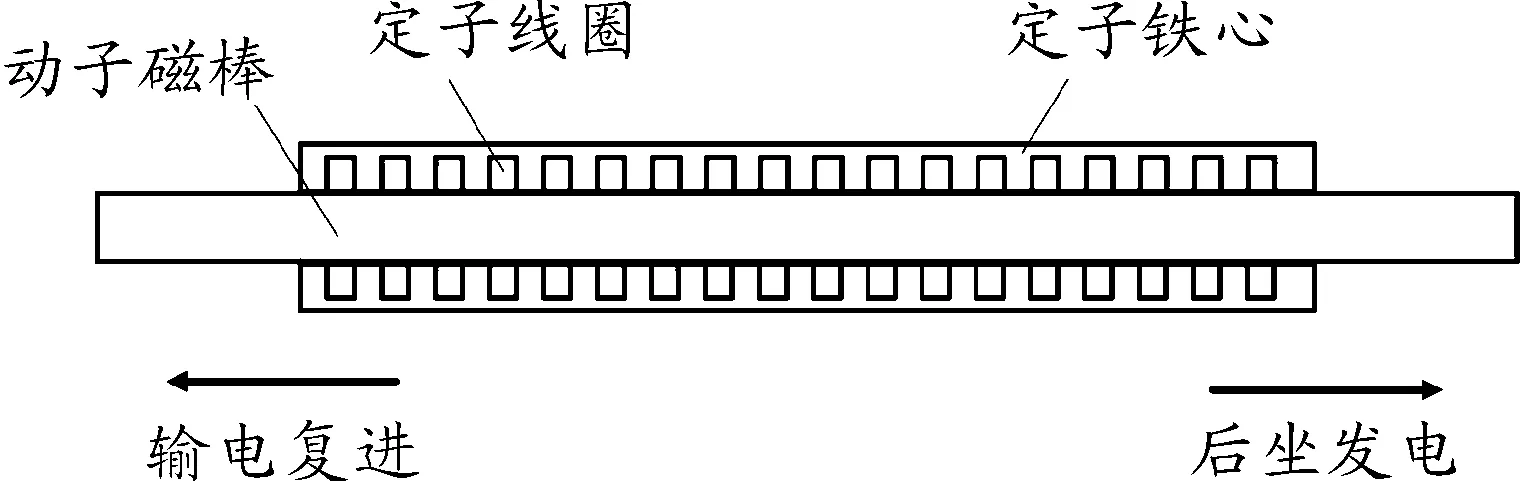
图1 电磁反后坐装置工作原理示意图
在制退后坐阶段,后坐部分带动动子磁棒与线圈绕组产生相对运动,在线圈绕组中产生感应电流,激发出阻碍相对运动产生的电磁阻力,通过可变电阻调节控制电磁反后坐装置中的感应电流进而控制电磁阻力按照后坐运动要求进行变化,同时将后坐动能转化为电能输入外部电路进行处理和储存;在复进阶段,将制退后坐阶段储存的电能经外部电路处理输回线圈绕组,在线圈绕组中产生推动动子磁棒的电磁推力,带动后坐部分进行复进运动,同时通过可变电阻调节输入进线圈绕组中的励磁电流来控制电磁推力按照复进运动要求变化;在复进节制阶段,外部电路控制线圈绕组中的励磁电流反向,将电磁推力转变为电磁复进节制力,阻滞复进运动,直至复进到位。
2 电磁反后坐装置运动分析
2.1 动力学模型
由于电磁反后坐装置的多用途特性,电磁反后坐装置在各个阶段的受力与传统反后坐装置相比,存在较大的差别。在后坐阶段,电磁反后坐装置取消了复进机力的影响,后坐阻力只包括电磁阻力和摩擦阻力,即:
FR=Fe+f
(1)
式中:FR为电磁反后坐装置后坐阻力;Fe为电磁阻力;f为摩擦阻力。
根据牛顿第二定律建立电磁反后坐装置后坐运动方程为:
(2)
式中:mh为后坐部分质量;Fpt为炮膛合力。
在复进阶段,电磁反后坐装置取消了制退机流液孔液压阻力,复进合力只包括电磁推力和摩擦阻力,即:
Fr=Fef-f
(3)
式中:Fr为复进合力;Fef为电磁推力,在复进加速阶段Fef为正,为后坐部分的复进运动提供正推力;在复进节制阶段Fef为负,为后坐部分的复进运动提供负推力。
建立电磁反后坐装置复进运动方程为:
(4)
式中:xf为复进行程;tf为复进时间。
2.2 电磁学模型
根据法拉第电磁感应定律有:
(5)
式中:e为感应电动势;N为线圈匝数;φ为磁通量。
对式(5)变形可得:
(6)
式中:B为磁通密度;S为磁通面积;v为磁通变化速度,即为动子运动速度。
根据电路的欧姆定律有:
(7)
式中:i为线圈绕组中的电流值;R为回路阻值。
相关研究证实[8-10],电磁力大小与线圈绕组中电流大小成正比,即:
Fe=Kei
(8)
式中:Fe为电磁力;Ke为电磁力常数,可通过有限元模型获得[8]。
显然在电磁反后坐装置结构设计完成后,电磁力常数为一个定值,为了实现对电磁力的实时控制,就需要对线圈绕组中的电流进行控制。由电路的欧姆定律可知,对感应电动势或者回路阻值进行调节,可以实现对电流的控制。
2.3 仿真分析
为探究电磁反后坐装置运行性能,本研究以某型火炮为研究对象,按照理想后坐复进运动规律对电磁反后坐装置后坐复进作用力合力变化规律进行拟定,进而确定可变电阻的阻值变化规律。已知某型火炮理想后坐复进运动规律如图2所示,拟定其后坐复进作用力合力如图3所示。

图2 后坐复进运动规律
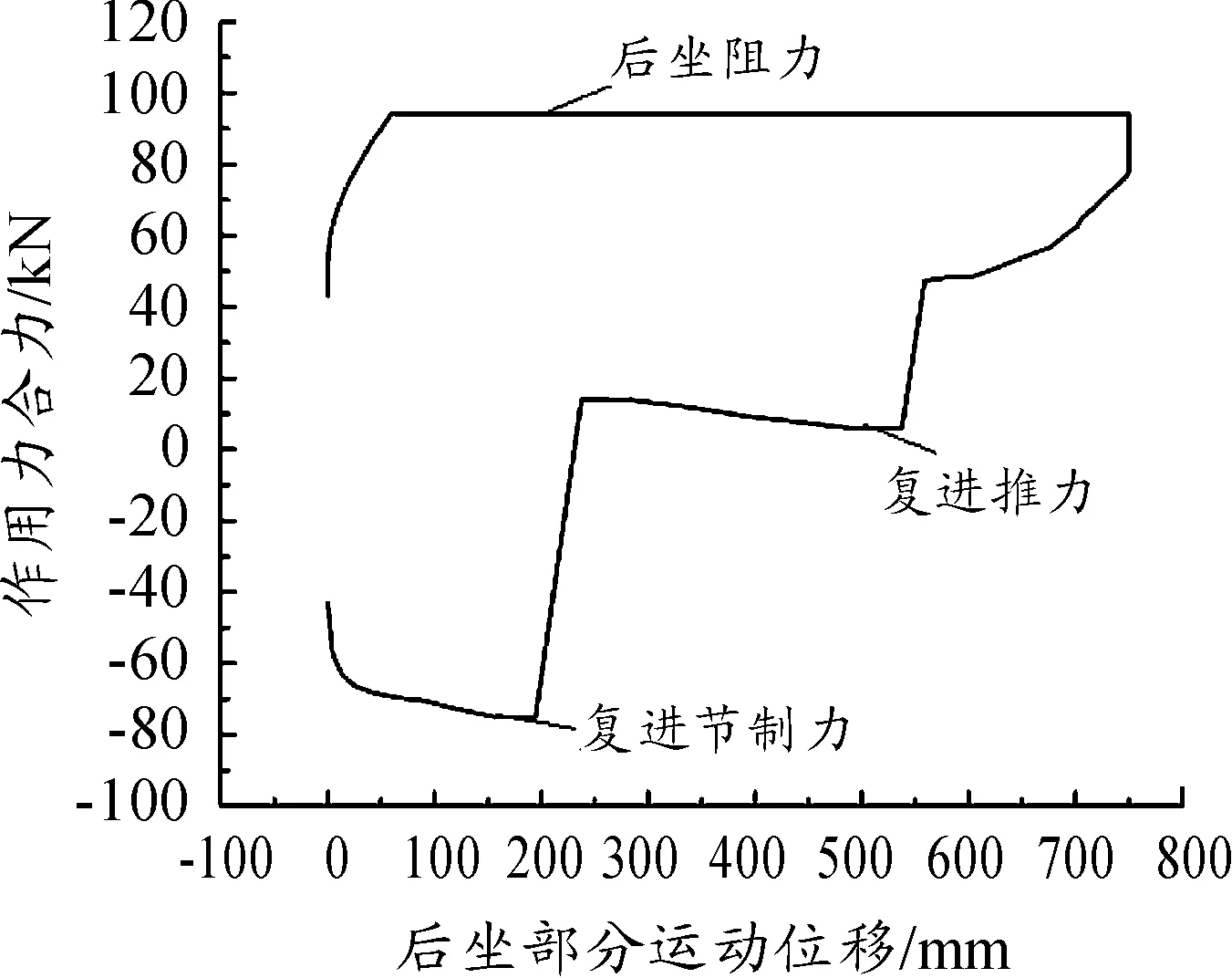
图3 后坐复进运动作用力合力
为了简化仿真模型,做出以下假设:
1) 假设动子为光滑圆柱结构忽略动子偏心;
2) 假设气隙中电磁场沿装置切向分布均匀;
3) 假设磁路所在平面与装置轴向平行,忽略磁场切向分量,故整体模型可以简化为二维模型进行分析。
基于上述假设条件,建立电磁反后坐装置二维有限元分析模型如图4,模型各部件材料设置如表1所示。
图4 电磁反后坐装置二维有限元模型
部件材料定子铁心DW465-50线圈绕组copper永磁铁NdFe35气隙vacuum求解/运动区域vacuum
仿真得电磁反后坐装置气隙磁通密度如图5所示,联立式(6)计算出电磁反后坐装置输出感应电动势,并将输出结果导入Simulink中搭建单相整流滤波电路对输出电压进行整流滤波稳压处理其结果如图6所示。
图5 气隙磁通密度
图6 输出电压曲线
显然,整流滤波后的输出电压呈现出较为平滑的平台现象,这不仅有利于蓄电储存,更符合火炮理想后坐阻力的“平台效应”,便于对电路进行有效控制,实现后坐运动的理想控制。联立式(7)和式(8)可知,回路阻值为:
(9)
式中:Ri为可变电阻阻值;R0为回路内阻。
忽略线圈容抗和电气元件等阻值的影响,则后坐阶段电磁反后坐装置的可变电阻阻值变化规律如图7所示。
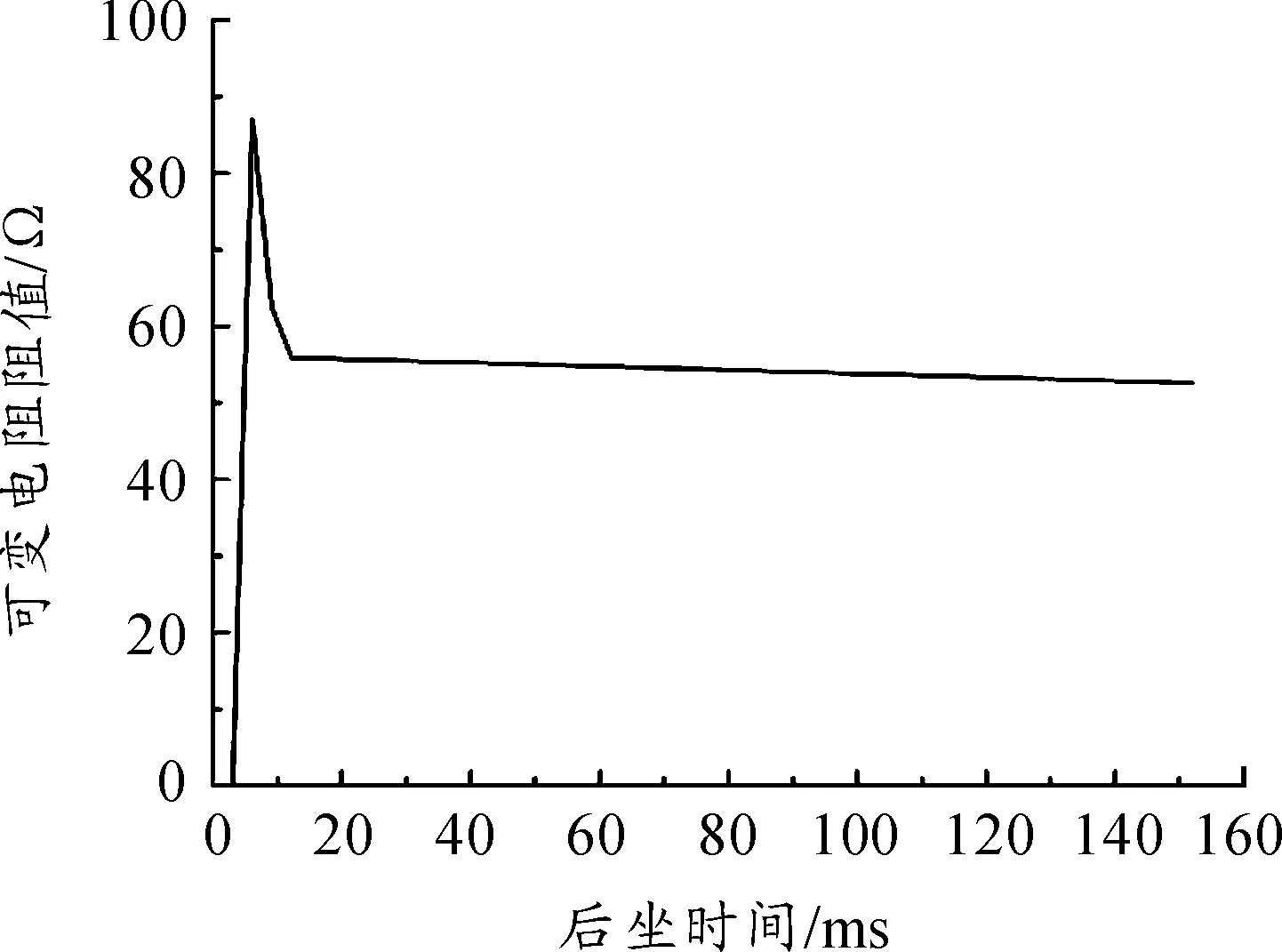
图7 后坐阶段可变电阻阻值曲线
由图7可知,后坐阶段可变电阻阻值变化呈现出先增大再减小,然后缓慢减小直至后坐结束。这是因为整流滤波后的输出电压输出稳定时刻早于后坐阻力平台出现时刻,此时整流输出电压和后坐阻力均处于逐渐增长时期,当整流输出电压达到最大值时,后坐阻力仍然在继续增长。
在复进运动阶段,电磁反后坐装置依靠输入进线圈绕组中的励磁电流产生电磁推力进行复进运动,励磁电流直接输入线圈绕组,成为电磁推力的根本来源,由于磁场正弦特性的影响,使复进阶段的电磁推力出现近似于正弦变化的“推力波动”。计算得复进阶段的励磁电流变化规律如图8所示。
与复进电磁推力变化曲线相比,励磁电流变化曲线波动较大,结合图5所示的气隙磁密曲线可发现,励磁电流的波动频率与气隙磁密的波动频率是一致的,通过控制输入进线圈绕组中的励磁电流消除了磁场的波动影响。根据电路的欧姆定律同样采取可变电阻控制输入线圈绕组的励磁电流大小,复进阶段电磁反后坐装置的可变电阻阻值变化规律如图9所示。

图9 复进阶段可变电阻阻值
显然,复进阶段可变电阻阻值变化大致可以分为3个阶段,第一阶段对应复进加速阶段,此时后坐部分加速向前,电磁推力为正且力值较大,对励磁电流的需求较大,因而此阶段阻值较小且呈现出缓慢上升的趋势;第二阶段对应复进缓慢加速阶段,此时后坐部分复进加速趋势放缓,后坐部分保持缓慢加速向前,电磁推力主要克服摩擦力做功,对励磁电流的需求较小,因此此阶段阻值较大且逐渐下降;第三阶段对应复进节制阶段,在电流反向以后,电磁推力变为负向且力值较大,因此此阶段阻值较小。
3 结论
1) 参考传统电磁阻尼器原理,提出了一种将制退机,复进机与复进节制器耦合集成的新型电磁反后坐装置,该设计方案能够完成传统制退机、复进机和复进节制器的功能。即后坐时利用电磁力产生制退力,并通过对可变电阻的实时控制实现阻力平台,同时利用直线发电机原理将后坐能量转化为电能储存,在复进时加载在线圈绕组上产生复进力推动火炮复进。
2) 建立了电磁反后坐装置的数学模型和有限元模型,基于场路耦合法对电磁反后坐装置进行仿真分析,对其后坐复进运动动力学特性进行分析,得出理想运动特性下的可变电阻的控制规律,进一步研证了电磁反后坐装置的可行性。