基于全阶观测器的无人机系统抗干扰控制
2019-08-12牛诚波
刘 倍, 王 政, 牛诚波, 裔 扬*
(1. 扬州大学信息工程学院, 江苏 扬州 225127; 2. 太原师范学院, 太原 030619)
随着无人机的快速发展, 人们对无人机飞行品质的要求越来越高,当存在外部干扰时,研究者需要设计一种合理有效的算法来提高无人机的抗干扰能力; 因此, 人们提出了许多抗干扰方法,如输出干扰调节法[1]、H2/H∞范数有界法[2]、自适应干扰补偿法[3]、滑模控制[4-5]以及基于干扰观测器的控制(disturbance-observer-based control, DOBC)[6-7]. 相比于其他控制算法, DOBC算法能够很好地对外界干扰进行估计并实现补偿,具有优越的抗干扰性能, 但面对不规则非线性干扰时如何实现有效估计还要进一步探讨.本文拟运用T-S 模糊模型[8-9]模拟非线性干扰过程,并设计全阶观测器分别观测干扰和无人机飞行状态, 通过设计反馈控制器, 实现对外部干扰的动态抵消, 使无人机系统具有良好的稳定性和鲁棒性.
1 无人机模型
1.1 仿真模型
本文考虑无人机的纵向运动方程[10]
(1)

1.2 问题描述


引理1对于给定定义域,x1(t),x2(t),fi(x(t),t) 满足‖fi(x1(t),t)-fi(x2(t),t)‖≤‖Gi(x1(t)-x2(t))‖(i=1,2), 其中Gi是给定的权矩阵.
1.3 T-S干扰

1.4 观测器及控制器设计

(2)
令H=-BK+BNj, 根据Lipschitz条件, 有
其中G1,G2是已知的相关常值矩阵.
2 结果及证明


3 仿真验证


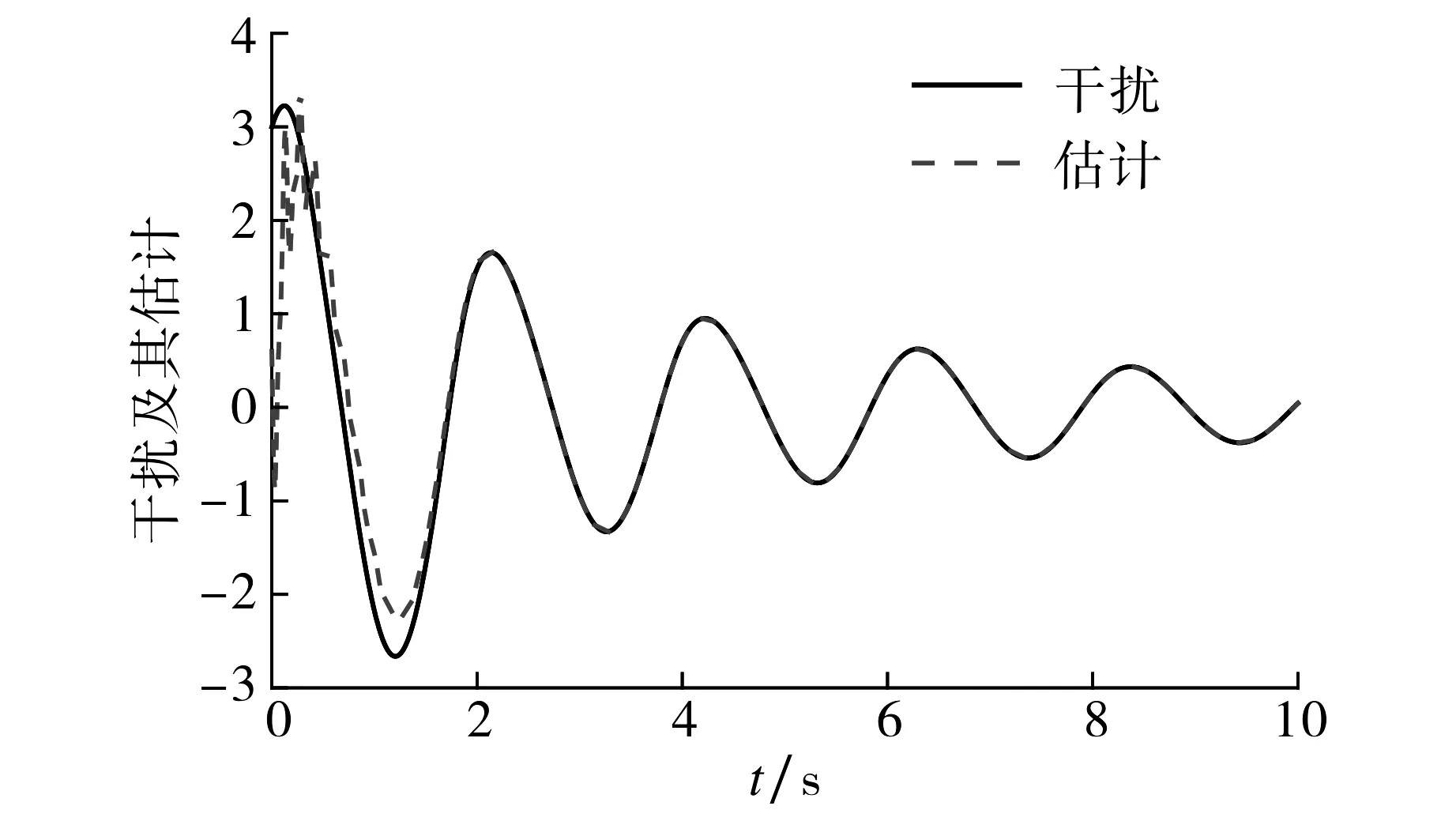
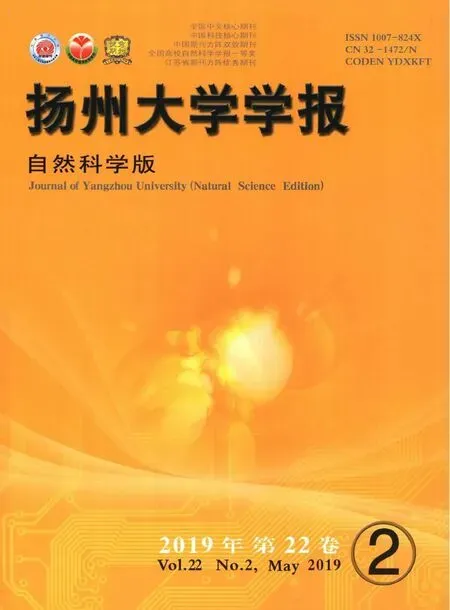
图1 干扰及其估计值Fig.1 Disturbance and its estimation value
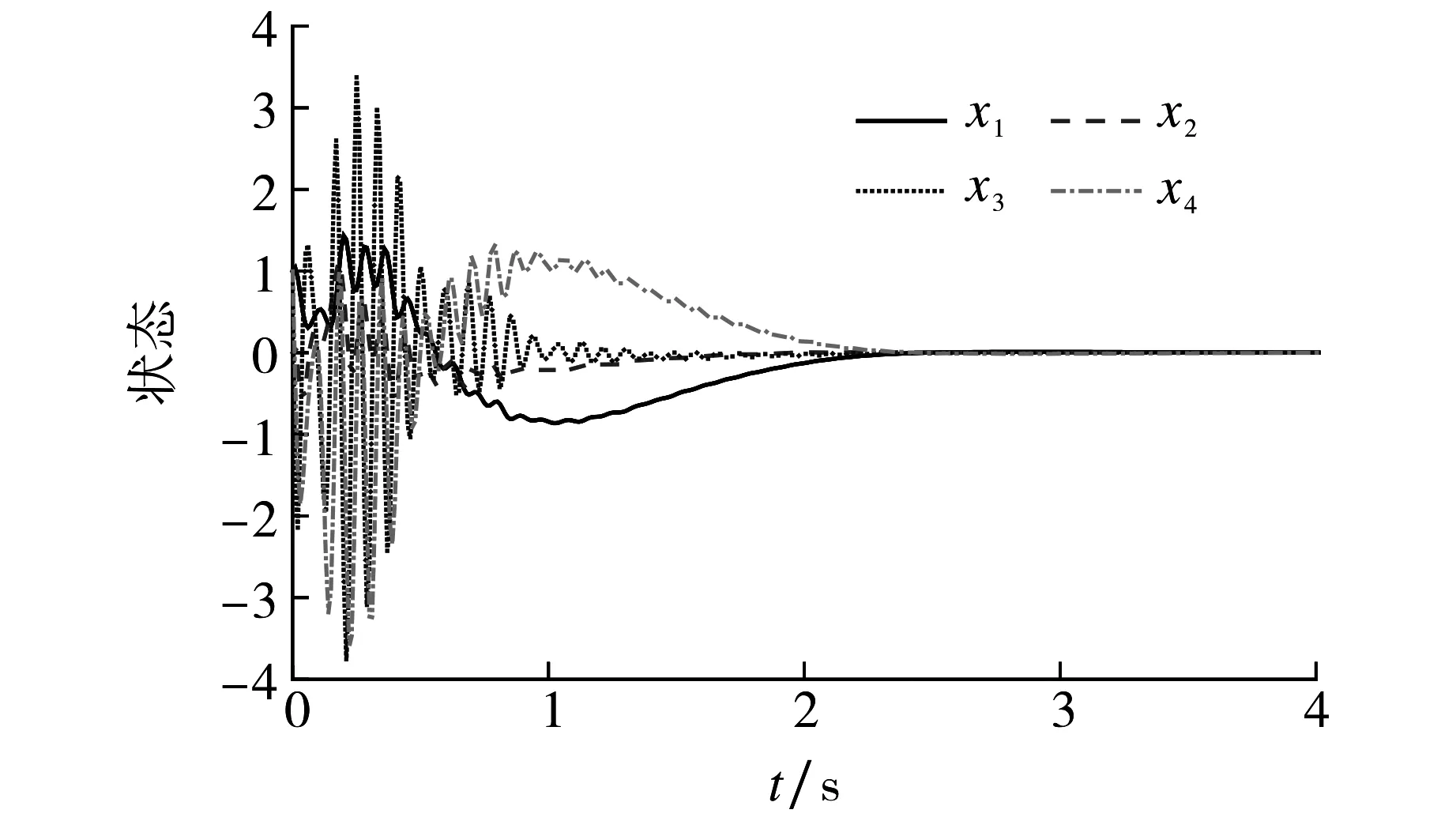
图2 系统状态Fig.2 The state of system

图3 干扰及其估计值Fig.3 Disturbance and its estimation value
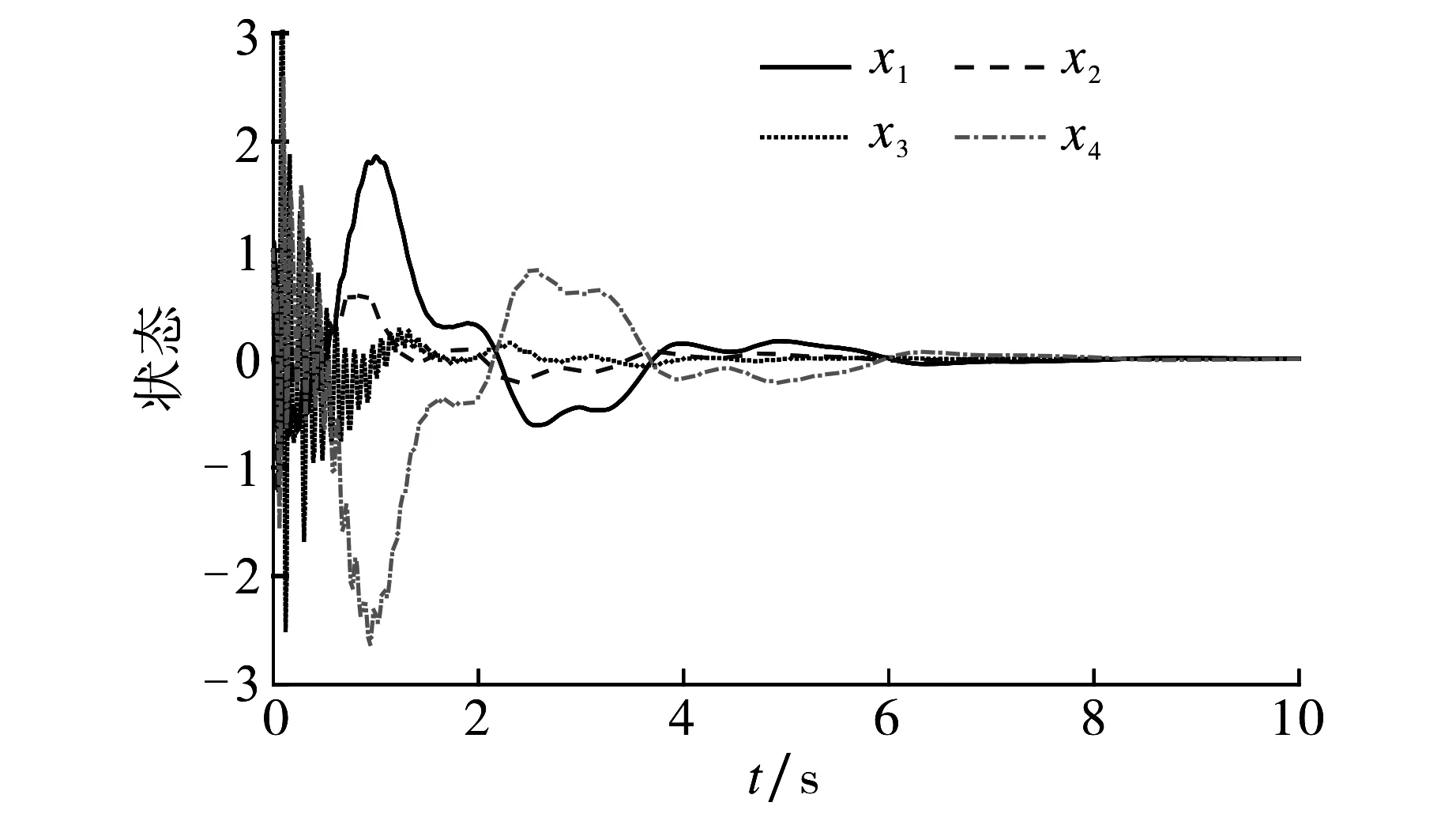
图4 系统状态Fig.4 The state of system