基于DDA专利分析挖掘商业基础需求情报
2019-08-07赵宁翟凤勇张玲
赵宁 翟凤勇 张玲
摘 要 专利是衡量技術创新能力和水平的重要指标,通过专利分析可以揭示技术创新信息和水平。以仿人机器人领域为例,基于DI数据库检索获得专利情报数据,导入专利情报分析工具DDA平台,利用其丰富的分析和可视化功能,通过使用DDA分析列表、共现矩阵、图谱的功能,对仿人机器人领域进行多角度专利分析。
关键词 DI DDA 情报挖掘 仿人机器人
分类号 G252.62
DOI 10.16810/j.cnki.1672-514X.2019.06.006
Abstract Patent is an important index to measure the ability and level of technological innovation, which can reveal the technological innovation information and level. This paper takes the field of humanoid robot as an example, based on DI database to retrieve patent information data, imports the platform of DDA for patent information analysis, and uses its abundant analysis and visualization functions. By using the functions of DDA analysis list, co-occurrence matrix and Atlas map, multi-angle patent analysis in the field of humanoid robot is carried out.
KeywordsDI. DDA. Information mining. Humanoid robot.
据世界知识产权组织(WIPO)的统计,专利涵盖了人类95%的科技成果,反映了经济发展相关信息,也是产业技术创新能力的直接体现[1]。作为一种标准化、公开透明、客观化的文献,专利信息对技术发明有详细描述,可以从本质上揭示企业、科研机构和发明人员技术创新能力[2],因而随着技术竞争的日益激烈,商业需求研究也增加了专利战略研究,为科研机构和企业开发新技术、产品提供决策参考,其研究核心就是专利分析。中国专利类型分为发明、实用新型和外观设计,国外并没有外观设计专利,而实用新型在很多国家也不涉及,并且发明专利按照国际标准经过实审才能去公开判断授权,所以发明专利在全部专利类型里科技含量最高,最能代表技术创新能力的类型,可以表明主体的技术创新水平和实力。基于此,本文仅对Derwent Innovation(DI) 检索出的发明专利进行分析,在德温特数据分析平台(Derwent Data Analyzer,DDA)中进行情报挖掘分析,从而获得有价值的策略情报。
1 专利分析工具DDA功能
DDA平台可以进行海量数据的多角度挖掘和可视化全景分析,形成切实可行的情报[3]。DDA在数据导入、数据清理、数据分析和结果的可视化方面都具有优势,尤其在数据清洗方面可使得分析的结果更加准确、贴近事实,并且DDA具有矩阵分析的独特功能,能够结合不同字段对专利文献信息进行多角度的分析,更能实现商业需求,其一键生成报告的功能使得分析更加有效率[4]。
(1) 数据导入。DDA可以对Web of Science核心合集的科技论文数据、InCites和Essential Science Indicators的指标数据、德温特专利数据(DWPI),Derwent Innovation(DI)以及STN、PubMed、中文论文数据库,甚至Excel表格等不同的结构化数据类型进行兼容与整合,进行多样化的需求分析。
(2) 数据整理。DDA管理数据包括数据集、管理字段、拆分文件、合并文件、处理冗余记录等。DDA的特点可以对数据深层清理,包括通过机器模糊运算实现,利用内设的叙词表对作者/发明人、科研机构/公司、国际分类号等字段清理,不仅清理标引不一致、输入错误数据,合并同义词等,而且支持手工清理分组标引、Excel编写清理的规则,可以保存成叙词表;根据需求自定义分组标引,可以进行机构学院设置、技术自定义分类…将繁复的条目按需求分类。
(3)数据分析。DDA通过有效的分析可将无序的数据转化为高附加值的情报,主要通过List、Matrices、Maps等分析工具进行。List可快速排序分析各个字段,对比任何两个列表,揭示其共性或某列表独特性。利用此特性可对比分析科研机构或者企业竞争对手方面的信息。Matrices通过不同字段可以建立共现矩阵Co-occurance Matrix、自相关矩阵Auto-correlation Matrix、互相关矩阵Cross-correlation Matrix、因子矩阵Factor matrix,从中发现隐含的趋势或者相关性。其用途主要在于对比不同对象在研究方向、发展趋势、合作态势等多角度的分布与规律。Maps可通过各类脚本与可视化工具,生成直观的分析成果,包括地域分布图、技术趋势气泡图、词云图、集群图谱,例如将主成分因素、相关性分析结果形成可视化图谱,揭示机构间、科研人员间或者各类技术间的关系。
(4) 生成报告。数据分析属于一二维分析,而预制的分析模块生成的报告属于三维分析,其中包括透视表、机构报告、机构对比报告、技术领域分析报告,DDA可以一键生成。
2 实证研究流程与数据检索
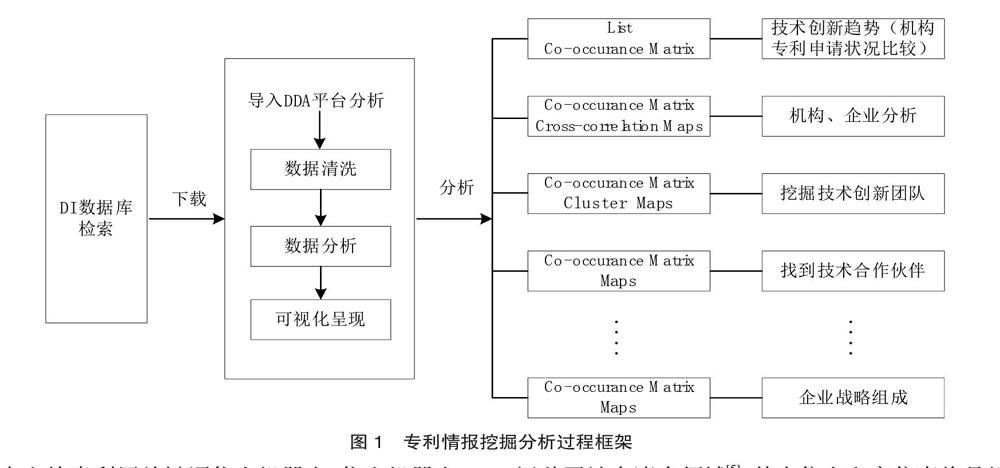
本文通过DI和DDA进行仿人机器人领域的商业需求分析,分析内容包括技术创新趋势、机构和企业分析、挖掘技术创新团队、技术合作伙伴分析等。专利情报挖掘分析过程框架如图1所示。
本文检索利用关键词仿人機器人、仿生机器人,测试组合形成检索式,采用Dewent Innovation(DI)数据库进行检索,结合关键词在数据库测试的结果,以TI=(humanoid ADJ robot* or bio* ADJ robot*) 检索截止时间为2018年5月19日,经过去重得到2980个专利族,通过字段KI=(a or a1 or a2 or b or b1 or b2 or c)筛选发明专利得到1349个专利族。
3 仿人机器人领域商业需求分析
机器人技术的发展和应用体现了国家科技和工业水平,从创新角度来看,随着制造业结构变化,机器人与人工智能、数字制造技术相互促进、服务,其应用涵盖了社会诸多领域[5],其中仿人和高仿真将是机器人主要发展方向,可以代替人进行各种作业[6]。近年来,我国政府逐渐加大了此领域的研究和开发[7]。
仿人机器人领域商业需求分析目标是针对科研机构和企业,主要利用DWPI专利权人代码进行分析。专利权人代码为世界22 000家左右大企业设计了唯一代码,涵盖了机构及所有子公司合集,这样专利检索可以保证企业名称存在多种形式统一,标引一致[8]。除了通过DDA平台自动生成专利报告外,还可以节选部分DDA相关信息,立足商业基础需求进行手工分析。
3.1 技术创新趋势分析
DDA的柱状堆积图提供一种可视化呈现效果,显示在仿人机器人领域研发机构如何积极地寻求获取新技术。通过DDA堆积柱状图可以获取每个机构在给定年份提交的专利申请量,由此可以很容易看出申请趋势,并比较各个机构的申请状况。
对仿人机器人领域排名前15的专利权人创建一个组,设定时间跨度为15年,以专利权为行矩阵,以所选年为列矩阵,生成共现矩阵。选择矩阵分析脚本,通过“Report - Plot Matrix in Excel”生成柱状堆积图,如图2所示,每年显示一个柱,在柱中不同颜色代表不同机构,所占区域大小与该机构公开发明专利数量成正比,区域越大意味着公开的专利越多,而柱高度表明给定年份的申请发明专利总量。图2可以看出在仿人机器人领域,法国ALDEBARAN ROBOTICS、日本索尼、日本本田、韩国三星、美国通用公司前几年一直投入比重大,近几年国内北京理工大学、常州大学发明申请比重增大。
3.2 机构和企业的评估分析
3.2.1 评估机构在寻求新技术方面的积极程度
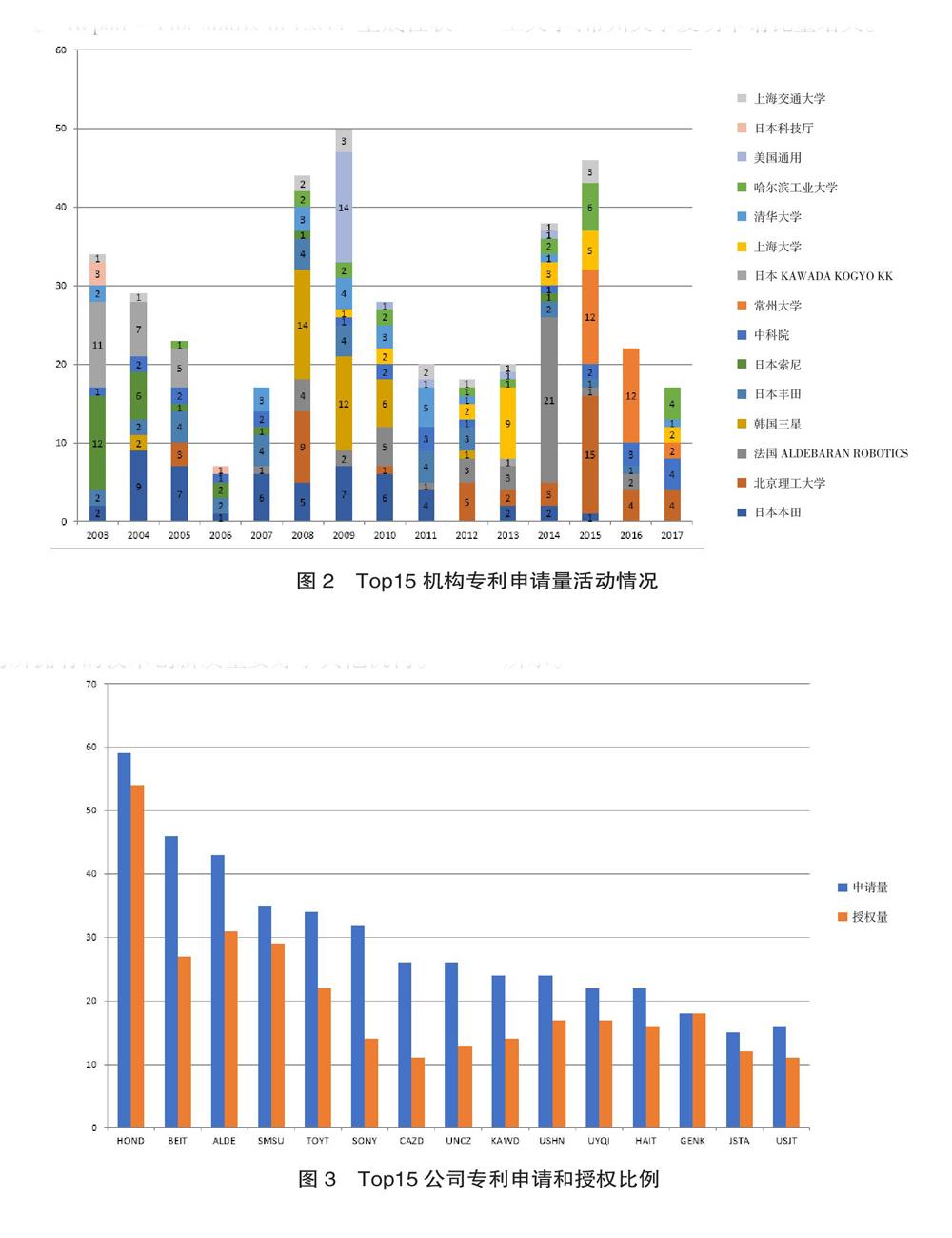
在仿人机器人领域,通过发明专利申请量与授权量的比例,可以发现拥有专利数量多的机构在推动新技术研发方面更加积极,而授权量多的则表明该机构所拥有的技术创新质量要好于其他机构。
通过位于宏指令(Macros)文件夹中的资源(Resources) 文件夹叙词表,针对专利申请和授权专利分别建组,打开公开号选择组/显示组点击创建的组为行,以所选机构为列,这里选择Top15的机构,生成共现矩阵,运行脚本绘制柱状图,如图3所示。
图3提供了一种可视化呈现效果,表明企业拥有专利数量。柱状图代表每一个机构,不同颜色代表申请专利数量和授权专利数量,每个区域的面积与该机构持有申请或者授权专利数量成正比。图3显示日本本田专利申请数量多,表明其在技术创新方面积极。从图3也可以看出中国的研究机构授权量不如国外机构比例大。
3.2.2 顶级机构分析
DDA对排名前30的机构进行分组,每个层级的机构组、个人专利权人、政府机构及学术机构字段创建组,通过比较各组占有的区域,来获得所关注领域专利分布全景的线索。排名前30的公司控制着绝大多数专利,这些公司可能会积极地保护自己的知识产权,在申请专利的时候防止侵权诉讼。若专利主要由个体发明人和专利组合规模较小的公司所控制,那么这些专利持有人可能会寻找投资资金,这个组可能是引入专利授权或者收购的“黄金目标。
根据仿人机器人Top30的机构组别持有记录数比例,看到排名靠前的公司还是由几家大公司把持,例如日本本田、法国ALDEBARAN ROBOTICS、韩国三星、日本丰田、索尼等,可见其仿人机器人领域被传统的高科技公司所布局,占据领导地位,新型的中小微企业在专利申请上占据不到优势在申请该领域的专利的时需防止侵权诉讼,中国排名靠前的基本是科研院所,包括北京理工大学、上海大学、清华大学、哈尔滨工业大学、浙江大学、上海交通大学,可以认为以高校实验室为主的研发是仿人机器人领域技术发展中不可忽视的重要力量。企业在技术发展储备中可以积极寻求与高校科研院所的合作,加快发展速度。
3.2.3 确定研究相似技术的机构
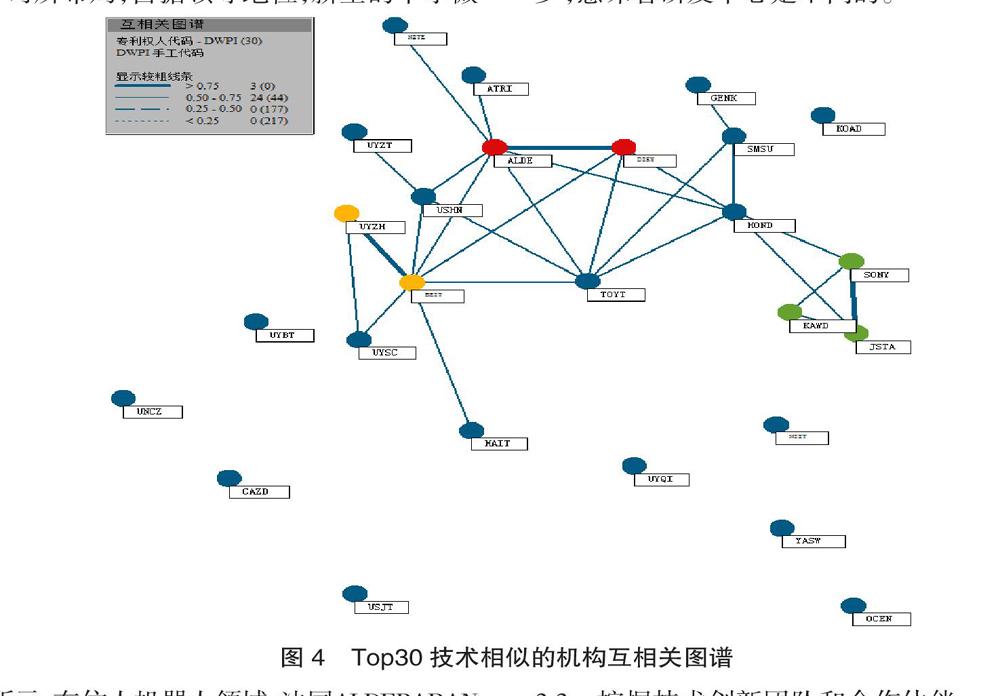
排名前列的机构是否正在开发相似技术,某一领域是否有过多参与者,机构在技术研发方面有多少重叠,都可以通过DDA互相关联图谱来展现。利用基于分配给专利的DWPI手工代码来进行技术分类,这样视图将显示相似技术公开的机构。通过对前30个专利权人创建组,对手工代码进行字段互相关联操作,生成图谱,如图4所示。机构用节点表示,通过其持有专利记录的DWPI手工代码之间进行比较,如果两个机构持有相同手工代码的专利,节点之间用线连接,机构间的连线越粗,表示其手工代码越匹配,即这些机构涵盖的相似技术越多。图谱中互联机构的聚类,表明机构致力于研发相似的技术;若节点之间没有联系,表示这些机构间共享的手工代码极少,意味着研发中心是不同的。
如图4所示,在仿人机器人领域,法国ALDEBARAN ROBOTICS智能机器人研发公司和迪士尼公司,日本索尼、日本科技厅、日本川田高知、北京理工大学和浙江大学研发相似的技术,其他机构的研发重点有所不同。相似机构可以作为合作伙伴进行技术上的合作,也同样属于竞争对手,需要做好对知识产权的预防保护。
3.3 挖掘技术创新团队和合作伙伴
通过DDA聚类图中可以找到发明人和他们的发明专利,即可分析在所关注的机构中的高产发明人,这些发明人中哪些人在一个团队里共同工作,这些发明团队创造过哪些专利。基于专利记录数量创建排名前15的机构,通过发明人/专利权人矩阵列表,双击所要了解的发明人机构所在的列,可以关联每个发明人的记录数,对此列进行排序以了解该机构活跃发明人(技术创新人才)。
将图谱限定在最活跃的发明人之中,选择排名靠前的发明人添加至组,创建聚类图如图5所示。如限定特定机构——北理工的发明人,可清楚了解研究人员团队和这些团队之间的关系。
聚类图中显示组中每个发明人,用不同的颜色标识,专利则以每个发明人链接“节点”小球呈现,单个节点包含由一个发明人独立研发的专利,组节点包含多个发明人合作研发的专利,组节点可能是两个或两个以上的发明人相链接,发明人与节点之间通过线连接。通过图可以看出几个发明人以不同的组合方式合作研发不同的专利,产生互联节点的“聚类”,显示重要发明人之间的合作关系,如北理工黄强和余张国、陈学超、张伟民、高峻峣合作频繁,黄强和李科伟团队却无合作关系。点击专利可见黄强发明人团队仿人机器人运动规划新方法,提出快速传感反射控制,通过评价运动相似性,提高机器人的稳定性,解决多自由度机器人拟人化复杂运动。以此操作,可对各机构创新团队进行挖掘,了解其最新动向。
针对企业和学术科研机构专利权人也可分别建组,通过DDA的共现矩阵列出专利权人为学术机构和企业的专利,可以显示曾经合作过的机构。共现矩阵的数据单元中,交叉点表示已经发生过合作以及该合作创造了多少专利。从本文的实际操作结果来看,仿人机器人领域企业与学术科研院所合作并不频繁,其中只有日本丰田和本田公司分别和日本早稻田大学和美国伊利诺伊大学合作,日本富士公司和神户大学合作过专利,北京天宇科创科技发展有限公司和北京航空航天大学合作。
3.4 市场上专利组合增长率
若想了解市场中什么类型的机构持有多数专利、顶级机构专利组合增长投资、个别机构加速或减缓技术开发等等情况,可以通过每年层级分组的专利权人的专利申请量来观察。通过企业、学术机构、政府排名前15的提出专利的申请量矩阵,生成柱状堆积图。
如图6所示,学术机构申请比例越来越大。此外,通过对特定的专利权人层级——Top15中的7个企业进行分析,可了解每年的专利申请情况,从中可发现占总申请数比重较大的组,并可发现是否有新的参与方阵加入该领域,或者机构是否正在巩固其在专利中的主导地位。查看这些学术机构在一段时间内的表现,可以了解到每个机构的战略组成,这有助于预测其未来方向。在这7个企业中,法国ALDEBARAN ROBOTICS公司和日本丰田似乎在大力增加专利申请,意味着这两个科研机构都很注重技术创新。
3.5 挖掘重点技术和技术融合方向
DWPI手工代码可表明企业技术创新方向,揭示其专利技术外部特征和应用领域,可以使我们更为深入地分析专利信息[9]。通过手工代码共现矩阵和聚类分析技术研发热点,为机构、企业提供重点技术的挖掘。
在DDA中通过DWPI选取相关机器人专利手工代码,生成矩阵图,其中交叉的节点表示手工代码共同出现的专利量,通过查看器可生成如图7所示的DWPI手工代码共现图。节点之间连线越粗,说明这些分类号在同一文献中出现的次数越多,由此表示这些节点之间的技术融合越高,而这些关系紧密的节点所涉及的文献相关技术关联度也就越高,也就表明机构企业间的技术相似度越高,其技术主题接近,这是识别合作对象和竞争对手的依据,而连线越少的节点代表的文献相关技术关联度则较低[10]。
从上述共现图关系可以看出技术特征接近的主要研究技术领域,其中机器人手和电气设备的流程控制技术关联度高;计算机控制流程、控制机械手操作、控制电气设备等技术相关联度高,即仿人机器人驱动装置和控制部分作为主要研究内容。可以认为该项技术发明融合主要集中在研究机械手、计算机系统传感器的控制方法上。
DWPI手工代码中共现关联主要为P62-E与P62-F、X25-A03E、X25-A03F、T06-D07B、T01-J07B。结合表1可知,P62-E指仿人机器人机械手、P62-F指代机械手测量、指示、传感部分;X25-A03E为操纵装置在机器人装备制造中的加工、组装、过程控制, X25-A03F为机器人装备制造中对材料加工、零件组装的过程控制技术,说明控制机械手操作是仿人机器人领域技术创新的重点。T06-D07B 、T01-J07B所涵盖的技术重要度集中在所指代的计算机控制系统操作机械手,这是研发重点突破所在。
4 结语
基于DDA的专利分析,通过仿人机器人的例子,本文对专利相关字段进行矩阵分析、图谱呈现,从技术创新趋势、机构企业分析、挖掘技术创新团队和合作伙伴、市场增长情况、重点技术及融合等角度,挖掘分析其商业基础需求情报。分析是一个反复比较的过程,审视相关图表可以提出额外的关联问题,这些问题分析都可以由DDA进行深度分析解答,如对于机构专利潜在的侵权、专利失效管理、合作基金来源、技术创新市场效应都可以做进一步需求分析探讨。
参考文献:
冯昌扬.国内外专利研究文献综述:2003-2012年[J].知识管理论坛,2013(1):52-62.
鲍志彦.高校技术创新能力评价实证研究:基于专利信息的测度分析[J].农业图书情报学刊,2016,28(8):5-10.
Derwent Data Analyzer[EB/OL].[2018-05-25].https://clarivate.com.cn/products/derwent-data-analyzer/.
任福继,孙晓.智能机器人的现状及发展[J].科技导报,2015,33(21):32-38.
于秀丽,魏世民,廖启征.仿人机器人发展及其技術探索[J].机械工程学报,2009,45(3):71-75.
仿人机器人.百度百科[EB/OL].[2018-05-20].https://baike.baidu.com/item/%E4%BB%BF%E4%BA%BA%E6%9C%BA%E5%99%A8%E4%BA%BA/61320.
李晓玄.仿人机器人发展概况[J].电子技术与软件工程,2016(11):127-128.
利用Thomson Data Analyzer挖掘技术情报[EB/OL].[2018-05-25].http://www.docin.com/p-327687163.html.
温芳芳.基于德温特专利分类号耦合的技术多缘性与技术相似性研究:以29家福布斯全球2000强汽车企业为例[J].情报理论与实践,2017,40(8):87-92.
王旭东.基于德温特手工代码的专利技术挖掘研究[D].大连:大连理工大学,2017.