驱动刚度非线性对双检测微陀螺性能的影响
2019-08-06郝淑英李伟雄李会杰张琪昌冯晶晶
郝淑英, 李伟雄, 李会杰, 张琪昌, 冯晶晶
(1. 天津市先进机电系统设计与控制重点实验室,天津 300384; 2. 机电工程国家级实验教学示范中心,天津 300384;3. 天津市非线性动力学与控制重点实验室,天津 300072)
微陀螺仪是一种微传感器,用于测量物体相对惯性空间转动的角速度或者角度,在各种制导航空弹药、微小飞行器、稳定平台、机器人等军事领域和汽车导航、消费电子、移动应用等民用领域有着广阔的应用前景[1]。在微机械陀螺的研究中,陀螺的灵敏度和分辨率的提高始终是人们追求的主要目标[2]。学者们在研究过程中发现,微电子机械系统中存在着多种非线性因素:所用特殊材料的非线性、刚度的非线性、静电力的非线性[3]以及挤压气隙阻力的非线性[4]等,这些因素的存在往往会导致线性动力学的设计不精确甚至失效[5],同时,也会使微陀螺系统表现出更为复杂的静动态动力学行为。随着研究的深入,了解非线性行为对微陀螺性能影响的重要性逐渐被重视。微陀螺系统中的刚度非线性是由微弹性梁几何大变形引起的一种非线性现象。文永蓬等[6]指出非线性刚度会造成微陀螺在零角速度附近,系统有相对大的输出,即出现明显的零点漂移,这非常不利于检测。刚度非线性特性还会影响闭环谐振电路的稳定性,如果控制电路参数设置处理不好,会出现混沌、分岔等震荡不稳定现象[7-9];另一方面,对于单自由度微陀螺系统,微弹性梁的非线性刚度硬化作用对轻松匹配驱动和检测模态频率非常有用,可以有效提高微陀螺的灵敏度[10]。通过前人研究可知微陀螺系统中的刚度非线性因素不可被忽略,因此,分析带有非线性因素的微陀螺的动力学行为对于了解其全局动力学行为、发展动力学控制问题以及优化振动设计是至关重要的。
然而,目前对微陀螺非线性动力学问题的研究目标仅限于单自由度系统,多自由度微陀螺的非线性问题鲜有报道。在多自由度微陀螺的研究方面,朱奎宝等[11]设计一种新的三自由度谐振式MEMS(Micro-Electro Mechanical Systems)陀螺结构,检测方向为双自由度,有效解决了陀螺带宽与检测灵敏度间的矛盾问题,提高了陀螺抗干扰的性能。Wang等[12]提出了一种新型四自由度MEMS微陀螺模型,驱动方向和检测方向均采用双质量块,同时提高了驱动和检测方向的带宽,并让两个带宽高度匹配,极大地提高了微陀螺的鲁棒性。但在多自由度系统的研究中,通常会将实际检测输出表达式中科氏力的影响消去,隐藏了科氏力变化对检测输出的影响,将双检测系统看作相对驱动独立存在的两自由度系统。通过本文分析所得结论,当考虑了驱动方向刚度非线性因素时,这种简化方式不再适用。
本文以单驱动双检测三自由度的微陀螺为研究对象,文中采用解析和数值结合的方法,假设驱动方向阻尼是线性的,对比线性刚度结果分析驱动刚度非线性对微陀螺驱动、检测一和检测二的幅频曲线、共振频率和微陀螺性能的稳定性的影响规律。首先采用解析方法得到线性刚度下微陀螺系统的稳态响应,其间,考虑科氏力对检测输出的影响;其次,计入驱动方向的刚度非线性因素,分析其对驱动方向幅频曲线、共振频率造成的影响规律,由于检测方向的科氏力和驱动方向响应的幅值密切相关,因此,驱动方向的刚度非线性会间接影响检测方向的输出,从而影响到微陀螺的灵敏度和带宽。这些为接下来进一步探究多自由度微陀螺更为复杂的非线性动力行为提供理论基础。
1 单驱动双检测微陀螺的工作原理
本文的研究对象是单驱动双检测的三自由度双解耦微陀螺,该结构结合了双级解耦和双自由度检测的优点。图1中,x方向为驱动模态,y方向为检测模态,解耦质量块mc起到隔离驱动模态和检测模态振动的作用,该质量块具有x,y两个方向的自由度,在驱动方向上,mc在梁k′s1的约束下通过梁k′d的连接沿x方向运动,此时,检测质量块ms1,ms2由于梁ks1的作用而保持静止;在检测方向上,mc在梁k′d的约束下通过梁k′s1的连接沿y方向振动,此时,驱动质量块md由于驱动梁kd的作用而在y方向相对静止。因此,mc有两个方向的自由度,md只有驱动方向一个自由度,ms1,ms2共同构成的检测质量块使得检测方向具有两个自由度,从而使得检测模态的幅频特性产生了不同于传统微陀螺的曲线。
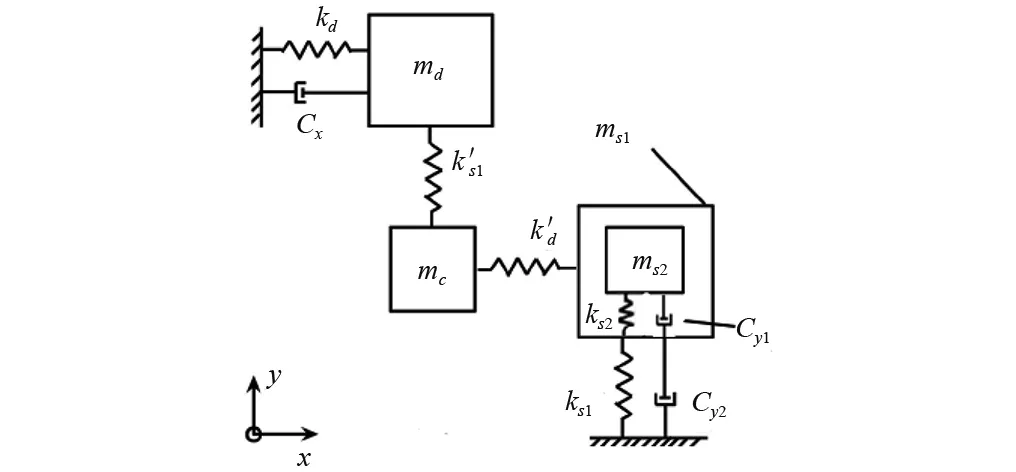
图1 单驱动双检测微陀螺动力学模型Fig.1 Dynamic model of single-drive double-sense micro-gyroscope
2 模型的线性刚度分析
建立该微陀螺动力学方程
(1)
式中:x,mx,Cx,kx,yi,myi,Cyi,kyi分别为微陀螺驱动方向,检测方向第i自由度的位移、质量、阻尼系数、弹性梁弹性系数,i=(1,2);Ωz为微陀螺输入角速度;F0为静电驱动力;ω0为激励频率, 且mx=mc+md,kx=kd+k′d,my1=mc+ms1,my2=ms2,ky1=ks1+k′s1,ky2=ks2。
采用复指数法对双检测动力学方程进行求解。解得稳态振幅B1,B2为
(2)


图2 检测方向线性刚度下的幅频曲线Fig.2 Amplitude frequency curve of sense detection under linear stiffness
对比图2(a)和图2(b),发现由于科氏力的影响,检测一、检测二的幅值在驱动模态固有频率处均发生了明显的共振现象,出现新的共振峰且位于两检测模态频率共振峰中间。这是由于科氏力是驱动响应幅值及激励频率的函数,驱动方向发生共振时获得最大的驱动响应幅值,此时科氏力最大,即中间的峰值是由于科氏力最大引起的,其与驱动的模态频率相对应。本文的理论分析结果与文献[13]的数学仿真相吻合,幅频曲线都获得三个峰值。在目前大多数针对多自由度微陀螺的研究中,均忽略了科氏力变化对检测输出的影响,即在实际检测输出表达式中消去科氏力因素的影响,将双检测系统看作相对驱动独立存在的两自由度系统[14],其检测响应只能得到与两个检测模态频率相对应的结果,如图2(c)所示。在这种情况下,一般将带宽定义为1和3两个峰值频率之差的0.54倍,然而,通过本文分析可以直接观察到,图2(b)中的第二个峰值直接影响到该带宽范围内检测灵敏度的稳定性,即在这一带范围内不能获得稳定的灵敏度,在驱动频率附近区域微陀螺灵敏度随科氏力幅值的变化而变化。同理,当考虑驱动方向的非线性时,为获得实际的输出结果,科氏力对灵敏度的影响不可忽略[15],在随后的分析中也印证了这一点,图2(a)、图2(b)中第二个峰值处会出现非线性特征。
3 驱动的立方刚度非线性分析
3.1 驱动刚度非线性对驱动动力学响应的影响
当考虑驱动方向刚度非线性时,动力学方程如下式,将其无量纲化,其中,kd是驱动方向的刚度非线性系数。
(3)
(4)

(5)
x(t,ε)=x0(T0,T1)+εx1(T0,T1)+O(ε2),
Tn=εnt;n=0,1,2,…
(6)
(7)
将式(5)~式(7)代入式(4)得
(8)
比较式(8)ε同次幂后得到一组线性偏微分方程
(9)
则式(9)的第一个式的通解可设为
(10)
其中,
(11)
将式(10)代入式(9)的第二个式子整理得
(12)
式中:cc为前面表达式的复共轭。 为使x1中不出现永年项, 须令exp(iωxT0)项为零,则有
(13)
将式(11)代入式(13)化简得

(14)
令φ=σT1-β,β′=σ-φ′,将其代入式(14)后令实部和虚部等于0得
(15)
令等式(15)的右端为零, 并消去φ整理得驱动方向的幅频方程为
(16)
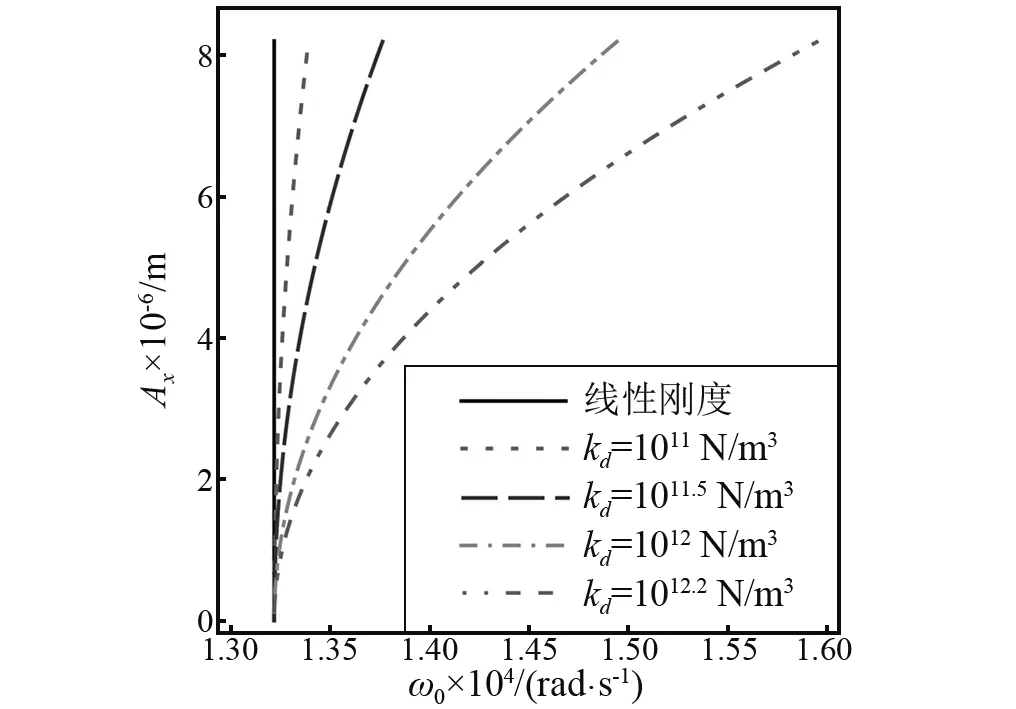
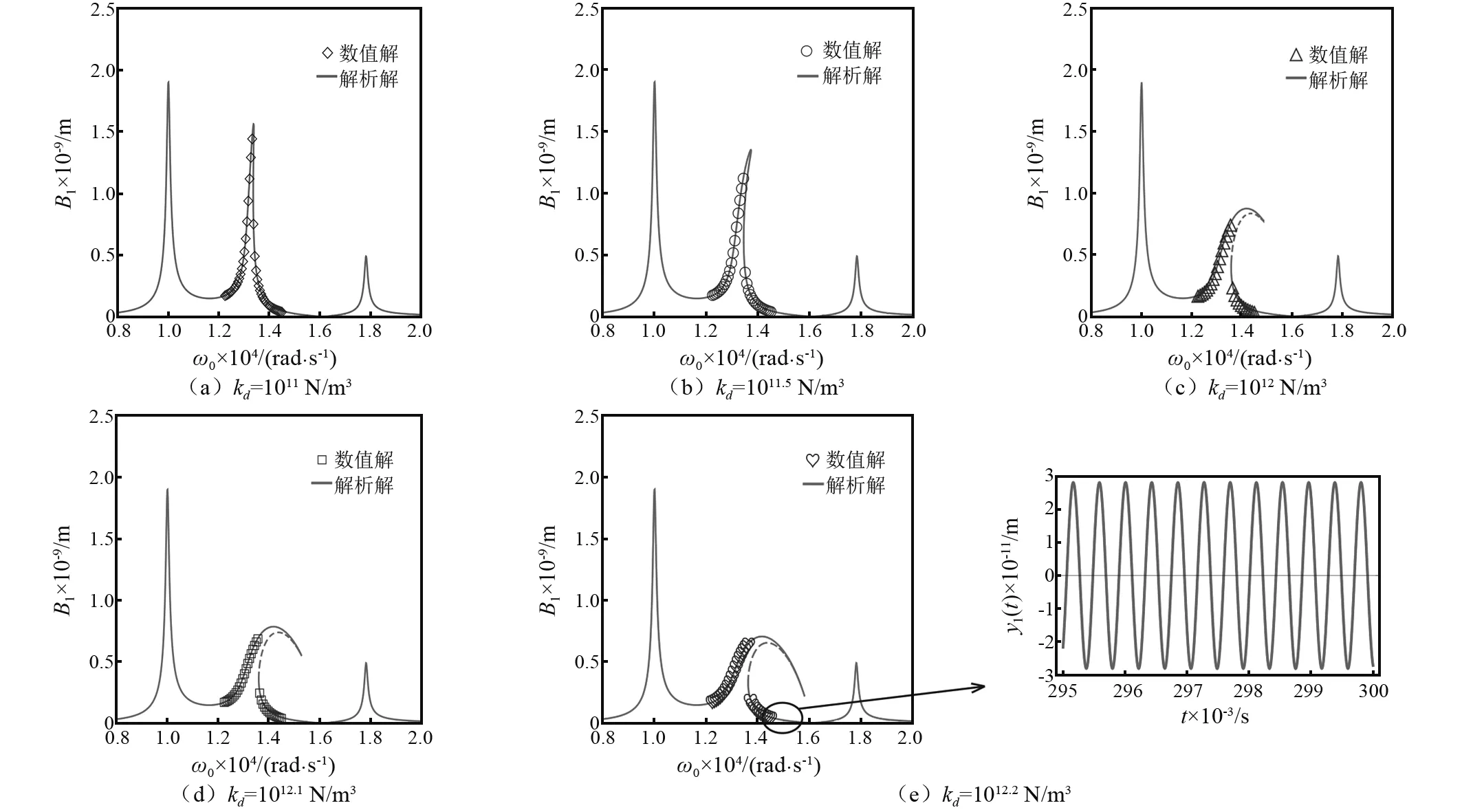
用原系统参数表示后,在0 (17) 根据式(17)可以绘出驱动主共振幅频曲线,如图3所示。系统驱动方向的弹性力为 Fx=kxx+kdx3=x(kx+kdx2) (18) 驱动线性刚度kx=192.9 N/m, 即kx为102量级, 当驱动位移x取10-6量级时, 则x2为10-12量级, 当|kd|<1011时, 有kdx2≪kx, 则弹性力的比例系数kx+kdx2可以近似为kx, 此时刚度非线性是可以忽略不计的,其动力学行为的研究可以由前面的线性化分析得出。为了讨论微结构中不可忽略的刚度非线性情况, 即kdx2 从图中可以看出,随着驱动刚度非线性系数的增大,驱动非线性幅频响应出现典型的非线性硬化特性,造成共振频率的偏移,但峰值不变,其中虚线部分代表近似周期解的失稳区域,很明显,失稳区域是幅频特性曲线上多解情况的中间解支,即幅频特性曲线上两个垂直切线点之间的虚线部分,此区域上有两个渐近稳定解和一个不稳定解,由于在数值解中只能实现渐近稳定运动,所以,在数值扫频分析中,对渐近稳定运动的跟踪只能按图3中箭头所示的路径进行,从而产生图示的跳跃现象,正扫是点3~点4的下降跳跃,负扫是点7~点2的上升跳跃。由于共振频率的偏移造成激励频率等于驱动模态频率时,响应幅值明显下降,当非线性弹性力是线性弹性力的4.5%,即驱动刚度非线性系数kd达到1012.2N/m3时,对比线性刚度分析,激励频率等于驱动模态频率时的幅值减少了70.7%,这直接影响微陀螺的驱动响应,间接影响微陀螺在检测方向的激振力幅值及输出信号,从而对微陀螺的灵敏度及灵敏度的稳定性产生严重影响。因此驱动方向刚度非线性对微陀螺灵敏度及灵敏度稳定性的影响不可忽略。 图3 驱动方向的线性和非线性刚度下的幅频响应Fig.3 Drive direction’s amplitude-frequency response under linear and nonlinear stiffness 由于含阻尼的Duffing系统在简谐激励下的受迫振动的峰值与非线性因素无关,且峰值大小不变[16],因此根据式(16),等式左边第二项为零,可得驱动方向主共振的峰值恒为 (19) (20) 考虑到式(19)结合式(20)可知,当激振力幅为常量时驱动瞬时固有频率是驱动刚度非线性系数的一次函数,频率偏移量与驱动刚度非线性系数呈正比关系,如图4所示。从图中可以看到,当刚度非线性系数达到1012数量级时,其轻微的变化都会造成驱动模态固有频率产生明显的偏移。 图4 瞬时固有频率与驱动刚度非线性关系Fig.4 The relation curve between the driving instantaneous natural frequency and driving stiffness nonliearity 非线性系统的另一特征是瞬时固有频率与振幅相关。由图5可知瞬时固有频率对刚度非线性及振动幅值的敏感性随着刚度非线性的增加而增加。在kd=1012.2时,驱动模块振动幅值较小的变化都会引起驱动固有频率较大的偏移。因此刚度非线性使得驱动模态的固有频率相对原本设计值产生严重偏差;另一方面,由于驱动模态采用单自由度结构,带宽很窄,非线性瞬时固有频率致使静电驱动力的驱动频率偏离驱动结构的模态频率,严重影响微陀螺正常工作。 图5 瞬时固有频率与振幅的关系Fig.5 The relationship between instantaneous natural frequency and amplitude 由式(2)中检测幅值与驱动幅值的关系,联立式(16)的驱动幅频关系,可得到检测幅值与激励频率的关系。然后利用Mathematics数学仿真软件绘制检测方向的幅频响应,结合数值扫频曲线得到检测一的幅频响应曲线如图6所示。 图6 考虑驱动方向的刚度非线性时检测一的幅频响应Fig.6 Sense 1 amplitude frequency response under drive direction’s nonlinear stiffness 由图6(a)和图6(b)可知,在刚度非线性系数kd较小时,相对线性幅频曲线,非线性曲线只是在驱动方向模态频率处发生了微小的偏移,此时非线性影响可略去不计。图6(c)~图6(e)表明随着刚度非线性系数kd的增加,幅频曲线非线性程度明显增加,峰值逐渐减小,幅频曲线在驱动方向模态频率处出现不稳定区域(虚线),侧弯、跳跃现象[17],由图6(e)中的幅频曲线可知在激励频率为14 890 rad/s处有三个解,两个稳态解。其稳态响应的幅值则与激励频率的变化趋势有关,其中低幅值的稳态解见图6(e)。当激励频率等于驱动方向模态频率ωx时,检测1的幅值大幅下降,尤其当刚度非线性系数为1012.2N/m3时,检测1幅值对比线性系统的幅值减少了65.2%。但驱动刚度非线性并不影响检测1和检测2模态频率附近的响应,其频响关系与线性系统一致。 由图7可知,检测二的幅频曲线在刚度非线性系数kd较小时,幅频曲线几乎和线性结果一致,随着刚度非线性系数kd的增加,幅频曲线在驱动固有频率附近同样出现典型的非线性硬化特征,但其影响相对于检测一来说弱了许多。但刚度非线性同样对检测一和检测二模态频率附近的响应无影响。 图7 考虑驱动方向的刚度非线性时检测二的幅频响应Fig.7 Sense 2 amplitude frequency response under-drive direction’s nonlinear stiffness 当刚度非线性系数为1011N/m3时,非线性的影响可略去;当刚度非线性系数为1012.2N/m3时,激励频率等于驱动方向模态频率ωx时,由于非线性系统固有频率的漂移使得检测二的幅值相对线性系统大幅下降,对比线性结果,检测二幅值减小70.3%,这将对微陀螺的输出信号造成重大误差,由于灵敏度为检测二幅值和输入角速度Ωz的比值,可见灵敏度也降低了70.3%,此时,峰值处的灵敏度对比线性分析也减少了10.8%,这将直接降低微陀螺的性能,刚度非线性引起的多解及不稳定解的存在都会严重影响微陀螺灵敏度的稳定性。 科氏力会影响检测输出的带宽,在刚度硬特性情况下应将检测一与驱动频率之间的频率范围设定为带宽以保持灵敏度的稳定性,避开因非线性解的跳跃而导致的灵敏度不稳定现象,此时驱动非线性对双检测微陀螺的灵敏度无影响,且刚度的硬特性有利于带宽的提高。 本文针对一种单驱动双检测三自由度微陀螺,在考虑科氏力对检测输出影响的前提下对该复杂动力学系统的线性及非线性动力学特性进行了分析,获得如下结论: (1) 驱动刚度非线性使驱动模态的幅频响应出现了典型的非线性硬化特征,引起驱动固有频率偏移。其非线性系统共振处的幅值只取决于静电驱动力的大小与非线性刚度强弱无关,均与线性系统相同,因此当静电驱动力为定值时瞬时固有频率与刚度非线性系数成正比关系。 (2) 瞬时固有频率与振动幅值和刚度非线性相关,固有频率的漂移量对振幅变化的敏感性随刚度非线性增加而增加。 (3) 驱动刚度非线性导致检测一、检测二幅频特性曲线均在驱动模态频率ωx处呈现非线性硬化特征,且较弱的非线性就会导致检测一和检测二在驱动模态频率处的幅值大幅下降,发生跳跃、共振频率偏移等。对微陀螺的输出信号产生极大影响,降低了微陀螺检测信号的稳定性,并与基于线性系统的灵敏度计算结果产生极大的偏差。


3.2 驱动刚度非线性对检测一输出的影响
3.3 驱动刚度非线性对检测二输出的影响

4 结 论
