Research on Trim Control of Compound High SpeedHelicopter
2019-08-01YUZhimingKONGWeihongCHENRenliang
YU Zhiming,KONG Weihong,CHEN Renliang
National Key Laboratory of Science and Technology on Rotorcraft Aeromechanics,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,P.R.China
Abstract: An investigation is conducted on optimizing the control allocation for trimmed flight on the compound helicopter. The compound helicopter features a single main rotor,a vectored thrust ducted propeller(VTDP)and lifting wings. Due to the redundant controls for thrust,elevator deflection,and differential and symmetric flap deflection,there is a wide range of trim solutions in forward flight for compound helicopter. A method is developed to calculate optimal trim solutions. Firstly,aerodynamics models for deferent subsystems of the compound helicopter are conducted,which consider the mutual interaction of each part. Secondly,a flight dynamics model is developed based on which the method of trim optimization is performed. Finally,the method is demonstrated using a compound helicopter UH-60L/VTDP. The trim optimization of flight conditions from hover to 370 km/h is conducted using the optimization method. The controls,fuselage attitudes as well as the allocation of lift and thrust along with the flight speed are obtained.
Key words: compound helicopter;trim;control;optimization
0 Introduction
Compared with the conventional helicopter,the compound helicopter[1-9]adds wing under the main rotor and uses vectored thrust ducted propeller(VTDP)to replace the vertical tail,horizontal tail and tail rotor. The wings have movable trailing edge surfaces that act as flaps and ailerons,called flaperons. When used as flap,left and right flaperon deflect synchronously,and when used as aileron,left and right flaperon do differential deflection synchronously. Adding wing is to meet the lift requirement at high speed,and using VTDP is to balance rotor anti-torque at low speed operation and supply forward thrust at high speed. However,the inclusion of wing and VTDP on the helicopter introduces redundant controls. The compound helicopter’s control variables include not only collective blade pitch,longitudinal and lateral cyclic pitches of the main rotor,but also the flap and aileron deflections of the wing as well as the controls of VTDP. For a given flight condition,the compound helicopter has different distributions of lift between the main rotor and wing,different distributions of propulsive force between the main rotor and VTDP,and different distributions of roll and pitching moments between the main rotor and the elevator and ailerons. That is to say,due to redundant lifting and thrust components,the compound helicopter has a number of possible steady flight solutions for a given airspeed/altitude condition, and the trim solution is non-unique.
Much of the previous research on compound rotorcraft has focused on the performance and the reduction of vibratory loads in trimmed equilibrium flight. Only a few studies focused on the trim methods of the compound helicopter. Some researches[7-9]investigated the trim solution for the compound aircraft to find an optimal set of trim conditions with optimization method. The study indicated that it can minimize the power,and even improve the attitude of flight by slowing down the speed of revolution of rotor. Ferguson and Thomson[10]presented a method to determine the trim values from hover up to 200 knots for both coaxial compound helicopter and hybrid compound helicopter. The method consisted of two procedures. Firstly,a pitch attitude schedule is developed to minimize the required propulsive force of the propeller through an optimization algorithm. Then the trim solution is obtained with optimized pitch attitude and the propeller thrust to trim the compound helicopters. Ref.[11]investigated the control strategy of tilt rotor aircraft,and got the controls and attitudes of XV-15 with the combination of control into four cockpit controls so that the trim solution can be determined unique. It is obvious that there are different trim methods for different configurations of compound helicopter.
In this paper,a control strategy of compound helicopter in various steady level flight conditions is studied. The concept of optimal rotorcraft trim through the application of sequential quadratic programming(SQP)methods is developed,and its application to advanced rotorcraft configurations with complex,and constrained trim solution spaces is explored. Aerodynamic forces of rotor,wing,fuselage,and VTDP are modeled including the aerodynamic interaction effects between subsystems. Controls and aircraft attitude in various forward speeds are obtained with optimization method. The compound helicopter UH-60L/VTDP(Fig.1)is taken as an example for demonstrating the effectiveness of the methodology.
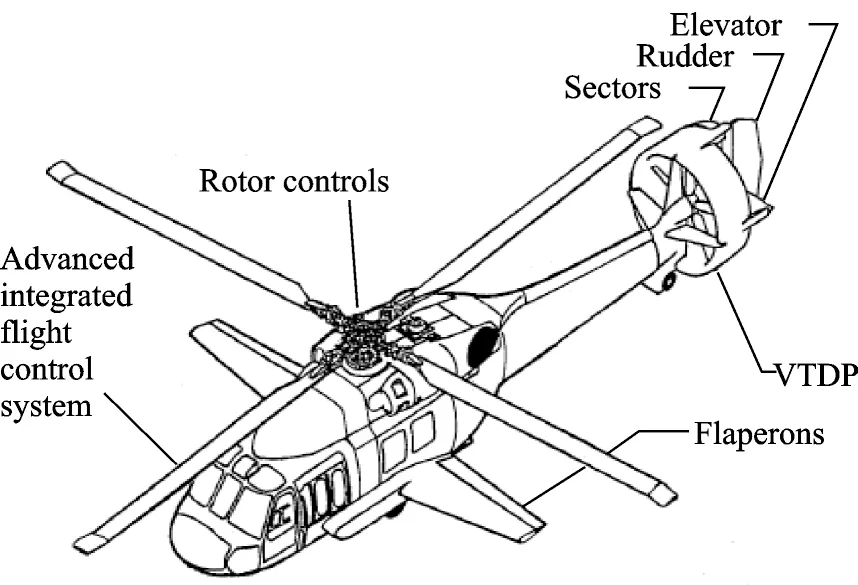
Fig.1 UH-60L/VTDP
1 Aerodynamic Modeling of Compound Helicopter
1.1 Rotor modeling
Due to the wide flying speed range of the compound helicopter,the rotor model should reflect both the high speed state and the low speed state.When the compound helicopter flies at high speed,the combination of high speed and low rotor speed can produce an advance ratio up to 0.8[12],that is far above what is typical for conventional helicopter.The aerodynamics environment of the rotor at high advance ratio is very complicated,in which the large reversed flow region of the retreating blades is the leading feature[13-17],thus resulting in a large range of the profile angle of blade during the week of rotation. A method is conducted for predicting the performance of the rotor at high advance ratio,which adopts the wind tunnel test data of airfoil for attack angle of 360° instead of lifting line theory of small attack angle,and the aerodynamic model considers the compressibility of advancing blade,stall effect and large reversed flow region of retreating blade as well as great sweep flow on the blade.When the compound helicopter flies at low speed,there is interference between the rotor and the wing,which will affect the induced velocity of the rotor. The interference factors between rotor and wing can be referred to reference[18]. An unsteady flap motion model of blade and Pitt-Peters dynamic inflow model which considering time-varying and non-uniform distribution of induced velocity are set up to adapt to the rotor aerodynamic model. A computational method[19]of dynamic response for predicting the aerodynamic characteristics of high advanced ratio rotor was developed based on the inherent coupling relationship among rotor aerodynamics,rotor induced velocity and blade flap motion.
To validate the aerodynamics model of the rotor of the compound helicopter,the wind tunnel test data[20]of the performance of the H-34 rotors at high advance ratio were compared with calculations. The conditions for rotor at high advance ratio are shown in Table 1(αs,disk angle of attack;μ,advance ratio;Ω,rotor speed),and the results are shown in Fig.2,which testify the aerodynamics model of the rotor(CPi,induced power coefficient;CPo,power coefficient of profile drag;CL,lift coefficient).
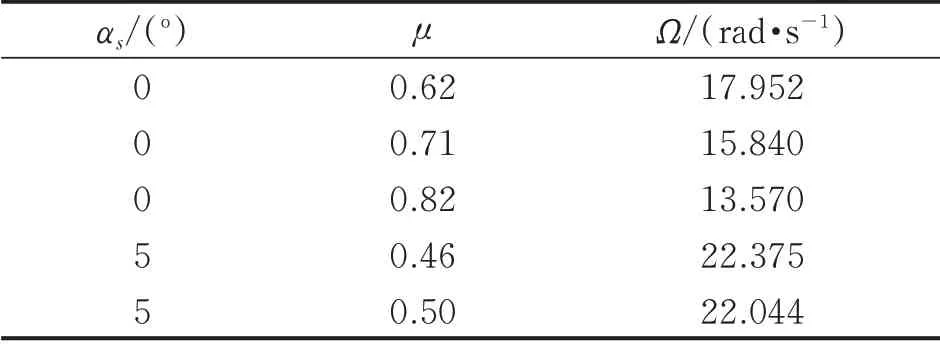
Table 1 Conditions for rotor at high advance ratio
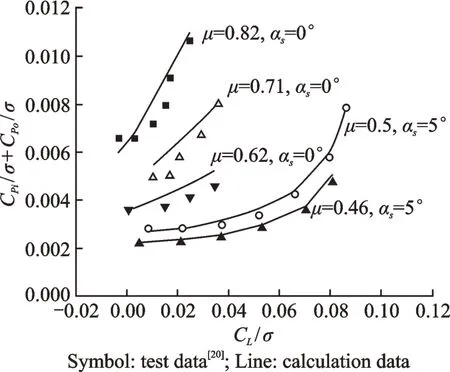
Fig.2 Performance for H-34 rotor at high advanced ratio
1.2 Fuselage modeling
Aerodynamic forces and moments are,in general,the functions of many variables such as angle of attack,sideslip angle and Mach number. In this study,they are written as functions of angle of attack and sideslip angle only and expressed as the form of aerodynamic coefficients.That is
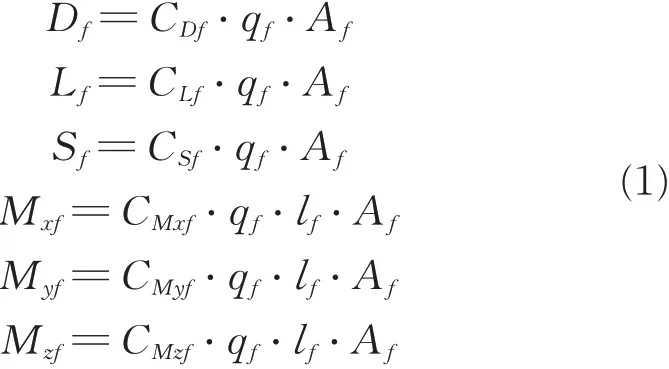
where Af,lf,qfare the reference area,reference length of aircraft and the dynamic pressure,respectively;CDf,CLf,CSf,CMxf,CMyf,CMzfare the aerodynamic coefficients which come from the wind tunnel test with the combination of different angle of attack and sideslip angle.
The rotor aerodynamic interaction on the fuselage is expressed as[21]
where viis the rotor induced velocity;ζXMRF,ζZMRFare the rotor interference factors acting on the fuselage in the X-,Z-directions,respectively.
1.3 Wing model
Although there are mature methods to model the aerodynamics of the wing,the aerodynamic model for the wing of the compound helicopter is complex due to the rotor downwash on the wing,especially in hover and at low forward speed. This paper presents the wing model based on the wind tunnel test data[9]of airfoil. The aerodynamic forces are modeled using table look-ups for the lift,drag,and pitching moment coefficients as a function of angle-of-attack and flaperon deflection. The three-dimensional effect of wing is corrected and the downwash of rotor on the wing is considered.
The velocity components of wing can be expressed as
where ζXMRW,ζZMRWare the rotor interference factors acting on the wing in the X-,Z-directions. Due to the short size of the wing of the compound helicopter,the rotor interference to the wing is similar to the rotor interference to the fuselage,and the values of ζXMRW,ζZMRWare approximately equal to the values of ζXMRF,ζZMRF,respectively.
The angle of attack,angle of sideslip and dynamic pressure of wing are
The corresponding drag,lift and moments are
where CDW,CLW,CMWare the wing drag coefficient,lift coefficient and pitch moment coefficients,respectively;CMXW,CMZWare the functions of wing dihedral angle,sideslip angle and aileron deflecting angle;and zWis the distance of wing pressure center from the body longitudinal axis.
1.4 VTDP model
The VTDP is modeled to generate a thrust acting on the center of the propeller at a certain specified orientation relative to the helicopter body reference frame,as shown in Fig.3.
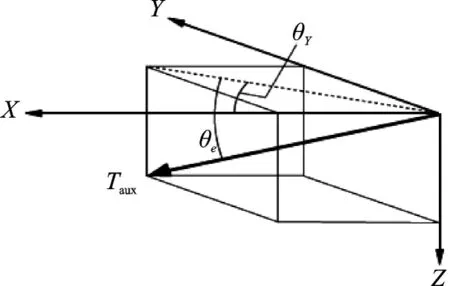
Fig.3 Orientation of VTDP thrust vector in body coordinates
The forces of different orientation can be yield

Besides the thrust,the VTDP has other external aerodynamic forces. Calculation of these external aerodynamic forces needs to get the velocities acting on the VTDP. This is achieved by performing a vector summation of the velocity of the fuselage with the vector resultant of the cross between the VTDP position vector and the fuselage angular velocity vector as well as the aerodynamic interference effects acting on the VTDP from the main rotor,the fuselage and the wing,i.e.
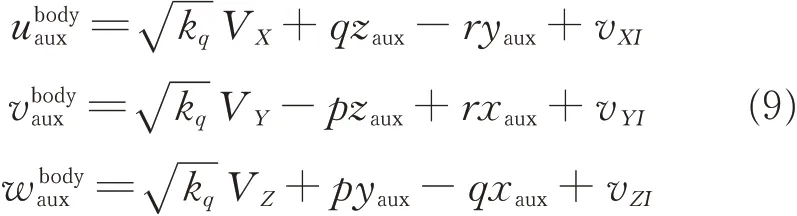
where(xaux,yaux,zaux)is the position of pressure center of the VTDP in the body coordinate,and kqis the loss of the dynamic pressure acting at the auxiliary thruster[21].
vXI,vYI,vZIcan be expressed as
where vXMR,vYMR,vZMR,vXW,vYW,vZW,vXF,vYF,vZFare the interaction velocities acting on the VTDP from the main rotor,the fuselage and the wings,respectively.
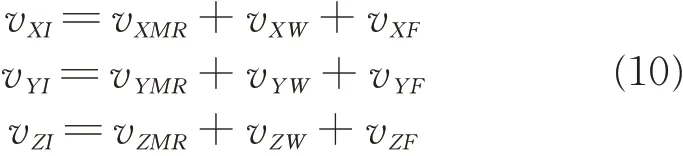
vXMR,vYMR,vZMRcan be yielded by
where viis the rotor induced velocity,while ζXMRAUXand ζZMRAUXare the rotor interference factors acting on the VTDP in the X- and Z-directions,respectively,and they are functions of skew angle of wake and longitudinal flapping angle of rotor[21].
The fuselage interaction velocities acting on the VTDP vXF,vYF,vZFcan be yielded by
where SIGand EPSare the fuselage interference factors in the Y-,Z-directions,respectively[21].
The aerodynamic interaction velocity of wing acting on the VTDP vXW,vYW,vZWcan be yielded by
The wing interference factor εwingis calculated according to[22]

where

And
where AR is wing aspect ratio;haux,lauxare the distances in the Z and X directions which define the location of the VTDP with respect to the wing;b is the wing span;and λ is the wing taper ratio.
The incident velocity acting at the VTDP is then rotated into the local reference frame using the standard rotation through pitch,roll,and yaw Euler angles,and the local x axis is coincident with the centerline of the VTDP. The sideslip angle,βaux,and angle of attack,αaux,for VTDP are then calculated using the local velocities in the local frame
The external aerodynamic forces acting on the thruster are calculated according to

where q is the dynamic pressure acting on VTDP

and qfis a table lookup function of appropriate incident angle(either αauxor βaux).
2 Trim Strategy
When the compound helicopter aircraft is making steady level flight,the linear accelerations,angular accelerations and angular velocities in body axes are equal to zero. Thus the rigid-body Euler equations reduce to
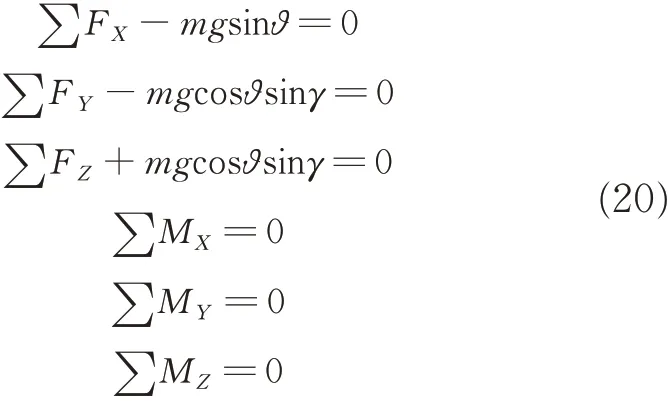
where ∑FX,∑FY,∑FZand ∑MX,∑MY,∑MZare the aerodynamic forces and moments in the body axes from the rotors,wing,fuselage and VTDP.ϑ,γ,mg are the pitch angle,the rou angle,and the gravity of the helicopter.
Eq.(20) is the governing equation for trimming. After the aerodynamic forces and moments are developed,the trimming can be made. However,it is not easy to do so since the six governing equations uniquely determine the six trim values.The compound helicopter uses both helicopter and airplane controls. Thus two types of controllers for both helicopter and fixed wing aircraft are available.For a given flight condition,the compound helicopter includes eight independent control variables:φ7,A1and B1,the main rotor blade pitch angles;δ1,the flap deflection;δ2,the aileron deflection;T,the thrust magnitude generated by the ducted fan;θe,the elevation angle of the fan thrust;and θy,the yaw angle of the fan thrust. Adding two attitude angles,there are ten variables in total.
In addition,as the forward speed increasing,the wing generates more and more lift and the lift provided by the main rotor is decreasing gradually.There are two modes to reduce the loading on the rotor:one is reducing the collective pitch of the main rotor,and the other is slowing down the rotor RPM. If RPM acts as a variable,the numbers of variables in the trim increase to 11.
Obviously,the numbers of trim values for determination are more than the numbers of governing equations. In order to capture the trim values,which consist of controls and aircraft attitudes,a careful analysis for control strategy and trim algorithm is necessary.
In fact,the trim of the compound helicopter is how to optimize redundant controls to achieve the best distribution of lift,propulsive force,and roll and pitching moment. It is a problem of nonlinearly constrained optimization in math. The methods to solve nonlinear constrained optimization problems include:penalty or barrier functions methods,the augmented Lagrangian functions, feasible directions,generalized reduced gradients and sequential quadratic programming (SQP) methods,among which SQP has been the most effective method to solve the nonlinearly constrained optimal problem.It can solve not only the equality constrained problem,but also the inequality constrained problem,and these category methods not only have global convergence but also have local superlinear convergence or stronger quadratic convergence characteristics. Here the trim optimization of the compound helicopter for deferent flight speeds is conducted with algorithm of SQP. The optimal object is to make the required power minimum. The constraint conditions are to make the total force and moment of the compound helicopter zero in trim points. Trim sweeps were performed over the range of all reasonable possible combinations of control positions,and the constraints are set to ensure:
(1)The control variables should be smoothly continuous,and the variables of elevator and longitudinal cyclic pitch should not be too much to ensure that the control system has enough control margin to meet the requirement of the flight safety.
(2)The attitude of the body should be in the reasonable scope and should not change drastically.
(3)The thrust of the VTDP should meet the requirements of anti-torque balance of main rotor in hover and the thrust allocation of main rotor and VTDP at high speed.
Based on the above discussion,the trim optimization of the compound helicopter is as follows.
The objective function is

The constraints of conditions are
(1)The constraint of equilibrium of force and moment is

(2)The constraint of range of variables.The variation range of design variables should be given in the optimization process. In this paper,the range constraints of design variables are given according to the range of the control variables of UH-60L /VTDP compound helicopter,that is
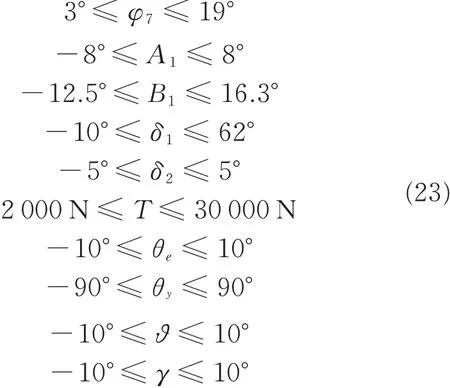
Rotor RPM is not included in the design constraint above,since it is worth to study further when and how much the rotor RPM begin to slow down,which need to consider the lift allocation of the rotor and wing,the thrust allocation of the rotor and VTDP,at the same time,and whether the control variables and attitude angles change continuously in the flight envelope is also need to be considered.
Fig.4 shows the compound helicopter trim optimization flow chart.
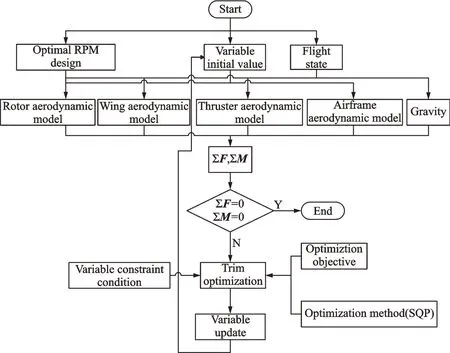
Fig.4 Compound helicopter trim optimization flow chart
3 Results Analysis
The main parameters of the compound high-speed helicopter are shown in Table 2.
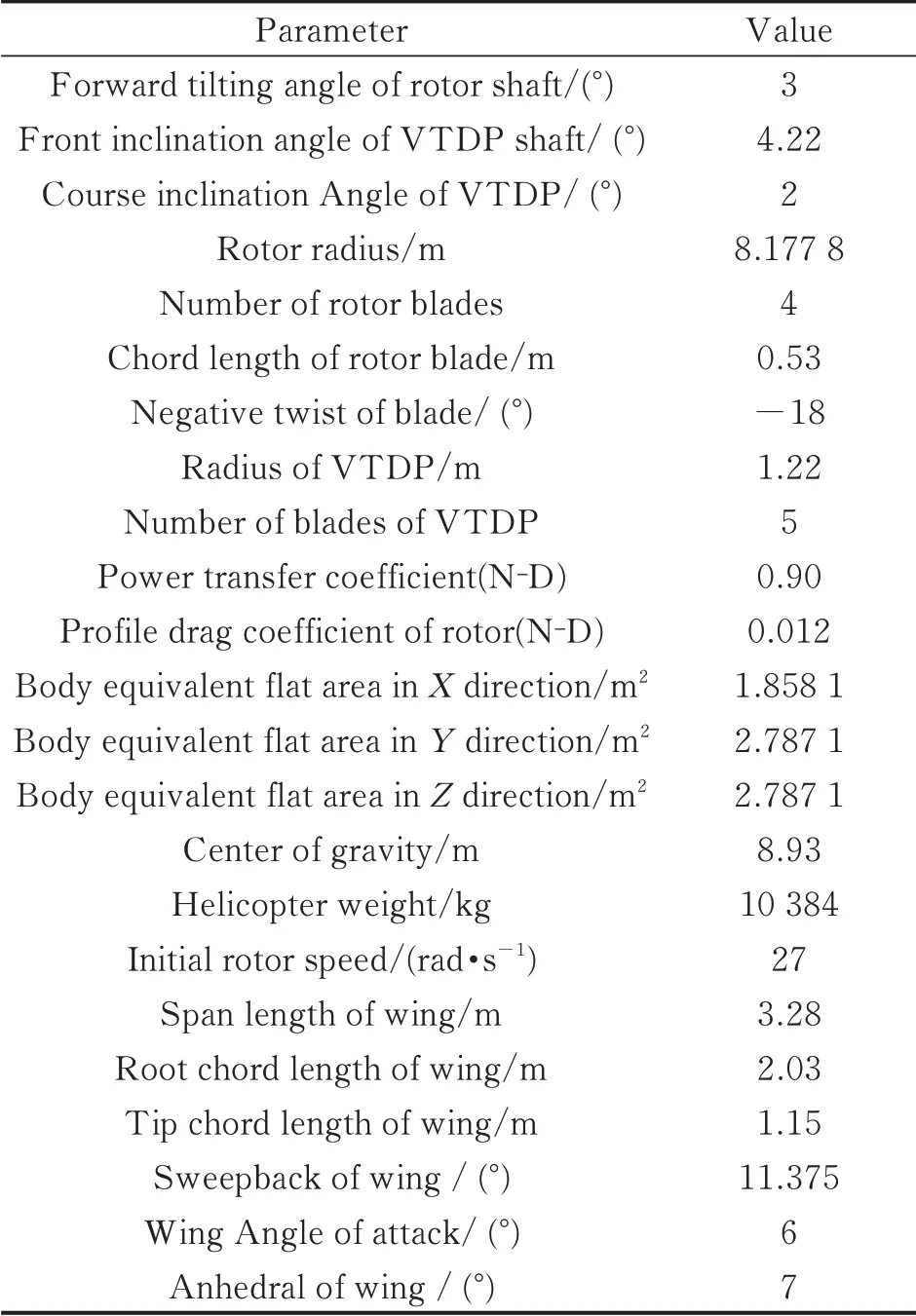
Table 2 The main parameters of the compound high-speed helicopter
According to the optimization method above,the compound helicopter UH-60L/VTDP is taken to perform the trim at the steady flight conditions from hover to 370 km/h. The rotor RPM schedule is set as shown in Fig.5,which is 100% in hover and is reduced down to 90% at high speed.
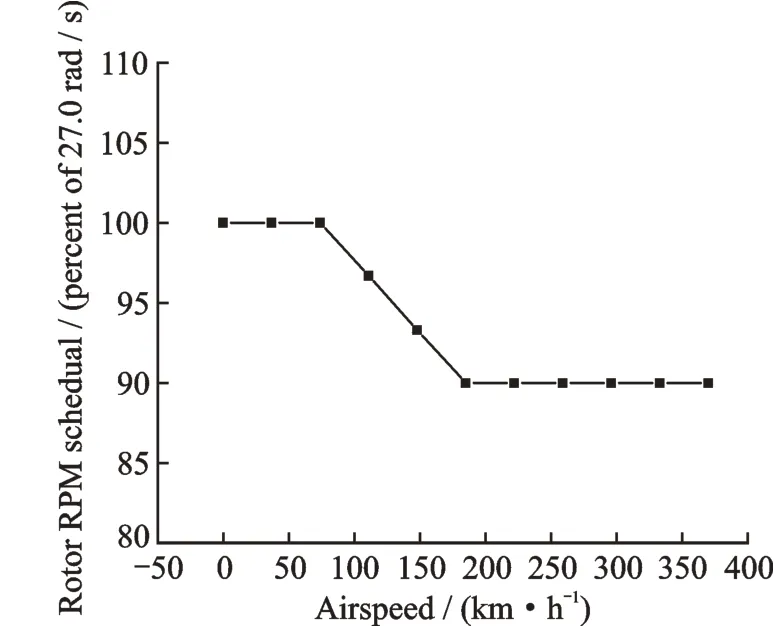
Fig.5 Rotor RPM schedule vs.air airspeed
Fig.6 and Fig.7 show the lift and thrust allocation in the body coordinates. In hover and at low speed,the lift is mainly supplied by the rotor,and with the flight speed increasing,the wing supplies more and more lift,which can reach to half of the whole lift at high speed. At the same time,the thrust provided by the rotor is decreasing,and the thrust provided by the VTDP is increasing. At high flight speed,the main rotor is no more provide thrust,and the thrust is entirely provided by the VTDP.
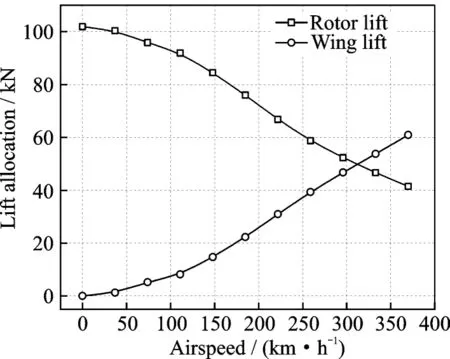
Fig.6 Lift allocation of rotor and wing in body coordinates
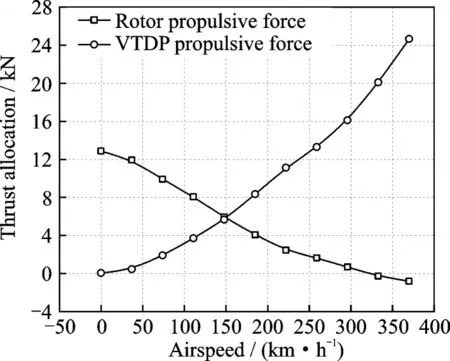
Fig.7 Thrust allocation of rotor and VTDP in body coordinates
Fig.8 shows the collective,longitudinal,and lateral blade pitch control positions at trim flight. The collective pitch is decreasing with the flight speed,which indicates that the main rotor is unloading gradually. The longitudinal cyclic pitch is increasing at low speed,so as to make the aircraft to flight forward,while at high speed,the forward thrust is mainly provided by the VTDP,so the longitudinal cyclic pitch is decreasing and simply plays a part in adjustment.
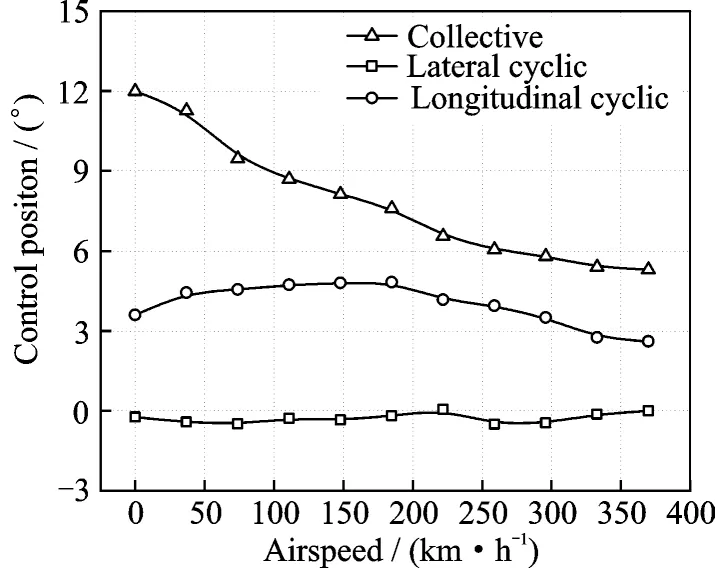
Fig.8 Rotor controls vs.airspeed
Fig.9 shows the deflection angles of the flap and aileron of wing(It is defined that the downward deflection of flaperon is positive)and the elevation and yaw angles of the VTDP. The yaw angle of the VTDP is as large as 90° in hover. The action of the VTDP is only to balance the anti torque of the main rotor. With the flight speed increasing,the yaw angle becomes smaller,because the rotor’s torque is smaller and smaller as well as the force which acts to balance the anti-torque. The elevation angle of the VTDP tends to be smaller with the flight speed increasing. Because at low speed,the attitude of the aircraft is nose-up(shown in Fig.10),and the thrust downward can produce nose-down moment,which make the aircraft tend to be level,and along with the attitude of the aircraft tends to be level,the force downward is reduced to zero. The flap defection is 60°downward in hover and at low speed in order to reduce the area of the wing,and then to reduce the interaction from the main rotor,while at high speed the flap deflection is decreased to zero nearly,so as to increase wing area,thereby to increase wing lift. The change of the angle of aileron is to adjust the balance of the rolling moment.
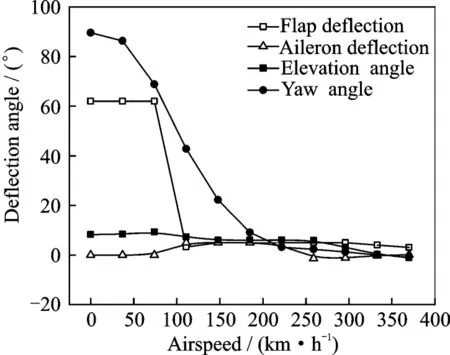
Fig.9 Deflection of flap, aileron, elevator and yaw angles vs.airspeed
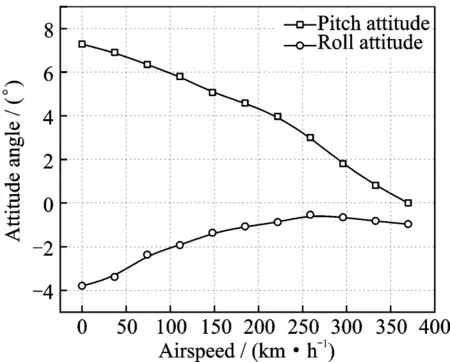
Fig.10 Attitudes vs.airspeed
Fig.10 shows the attitudes of the aircraft. At low speed the attitude of the compound helicopter is nose-up,with the flight speed increasing the pitching angle becomes smaller and the aircraft’s attitude tends to be level. When the flight speed reaches to 370 km/h,the attitude is level almost. The roll angle of the aircraft is also smaller with the flight speed increasing.
4 Conclusions
The redundant control of the compound high speed helicopter at steady flight condition is investigated. A flight dynamics model is developed on the sample of UH-60L/VTDP. The trim optimization of flight state from hover to 370 km/h is conducted using the optimization method. The variety of control variables,attitudes as well as distribution of the lift and thrust along with the flight speed is obtained.The results show that in hover and at low speed the lift and thrust are offered mainly by rotor,and the VTDP takes effect as a tail rotor of a helicopter.The loading on the rotor is reduced and lift generated by the wing is increased with forward speed increasing. At the maximum speed the rotor supplements only 40% lift,while the wing supplements 60% lift and the thrust is supplemented fully by the VTDP,so the redundant controls in the trim of the compound helicopter are resolved.
AcknowledgementThis work was supported by the National Natural Science Foundation of China(No.51505216).
AuthorsMr. YU Zhiming is currently a Ph.D. candidate at the National Key Laboratory of Rotorcraft Aeromechanics,Nanjing University of Aeronautics and Astronautics(NUAA),Nanjing,China. His research interests include the flight dynamics and structural of rotorcraft.
Mrs. KONG Weihong is an associate professor at the National Key Laboratory of Rotorcraft Aeromechanics,NUAA,Nanjing,China. Her main research areas are helicopter aerodynamics and helicopter flight mechanics.
Prof. CHEN Renliang is a full professor at the National Key Laboratory of Rotorcraft Aeromechanics,NUAA,Nanjing,China. His main research areas are helicopter aerodynamics,helicopter flight mechanics and control,and helicopter multidisciplinary optimization design.
Author contributionsMr. YU Zhiming contributed to case studies. Mrs. KONG Weihong guided the theoretical models,computations,responsible for language editing and proofreading. Prof. CHEN Renliang contributed to the discussion and background the study. All authors commented on the manuscript draft and approved the final manuscript.
Competing interestsThe authors declare no competing interests.
杂志排行

Transactions of Nanjing University of Aeronautics and Astronautics的其它文章
- Recent Advances in Hole Making of FRP/Metal Stacks:A Review
- Parameter Optimization for Improvement in Biomachining Performance
- Effect of Friction on Dynamic Response of A Power Split Transmission System
- Mathematical Model and Machining Method for Spiral Flute Rake Faces of Hourglass Worm Gear Hob
- Active Design Method of Tooth Profiles for Cycloid Drive Based on Meshing Efficiency
- Design and Study of Virtual Interventional Surgical System with Force Feedback