航天器蜂窝夹层板对称热变形分析及试验验证
2019-07-31马超陈晶王志国顾志悦张如变茅敏
马超 陈晶 王志国 顾志悦 张如变 茅敏
(上海卫星工程研究所,上海 201109)
夹层结构具有质量轻、强度高、刚度大、隔热、隔音、抗冲击、耐疲劳等优异的力学性能,在航空、航天、船舶、风电、建筑和包装等领域得到广泛应用。国内外学者对其进行了深入的研究,提出了多种理论模型和有限元方法[1-2]。
在航天器夹层结构热变形方面,文献[3]以星载蜂窝夹层结构固面反射器为研究对象,对其热变形进行了有限元仿真和试验研究,结果表明蜂窝的热变形占主导因素,蜂窝的刚度和热膨胀系数对热变形影响很大,蒙皮在一定程度上可以限制夹层结构的热变形。文献[4]设计了卫星平台结构热变形试验,模拟在轨典型外热流工况对卫星平台实施加热,采用数字摄影测量了热变形引起的两台相机安装面的指向变化。文献[5]等以某卫星的碳纤维/铝蜂窝太阳翼基板为对象,研究了碳纤维层合板和蜂窝芯子弹性常数和热膨胀系数的等效计算,对高低温状态下太阳翼基板的热变形进行了有限元仿真分析。文献[6]利用Patran/Nastran软件建立了某地球静止轨道气象卫星的有限元模型,分析了整星最大变形和有效载荷安装板对地变形角。文献[7]研究了高超音速飞行器金属栅格夹层梁的热弯曲变形,基于胞元热膨胀后受力变形分析,给出了栅格夹层梁受热弯曲变形的理论模型。
目前夹层结构热变形研究多针对中面发生挠曲的反对称变形,本文面向航天器蜂窝夹层板在平面温度场下的对称热变形进行理论分析和试验研究,分析蜂窝芯子参数(主要是蜂窝格子高度、边长和壁厚)对热变形的影响,为遥感仪器安装板的设计提供参考。
1 蜂窝夹层板对称热变形
1.1 结构特点
本文研究的遥感仪器安装板是卫星工程中广泛使用的铝面板-铝蜂窝夹层板,其面板和蜂窝芯子均为铝合金材料,几何参数及坐标系如图1所示。矩形蜂窝夹层板尺寸a×b;上下面板厚度相同均为t;蜂窝胞元为正六边形,胞元边长l,厚度ts,芯子高度h。建立直角坐标系,其中XOY面为中面,Z轴沿板面法向,整个夹层结构关于中面对称。

图1 蜂窝夹层板几何参数及坐标系Fig.1 Geometric parameters and coordinate system of honeycomb sandwich plate
1.2 温度场特点
根据航天器轨道、单机布局和热耗,进行热仿真分析可以得到蜂窝夹层板的温度场。本文研究的温度场T是一类平面温度场,沿板厚方向温度无变化,其仅为坐标x,y的函数,与坐标z无关。
(1)
1.3 热变形特点
蜂窝夹层板在平面温度场下的热变形可以分解为面内的热致伸缩和横向的热致弯曲两部分。在未发生热屈曲时,面内伸缩对横向弯曲的影响可以不计。本文研究蜂窝夹层板的热弯曲变形,其是遥感仪器光轴指向变化的主因。由结构和温度场关于中面对称可知,蜂窝夹层板发生变形时中面保持为平面,上下面板横向弯曲变形关于中面对称,如图2所示。这种变形实质上是蜂窝芯子的横向胀缩引起面板的凹凸起伏。
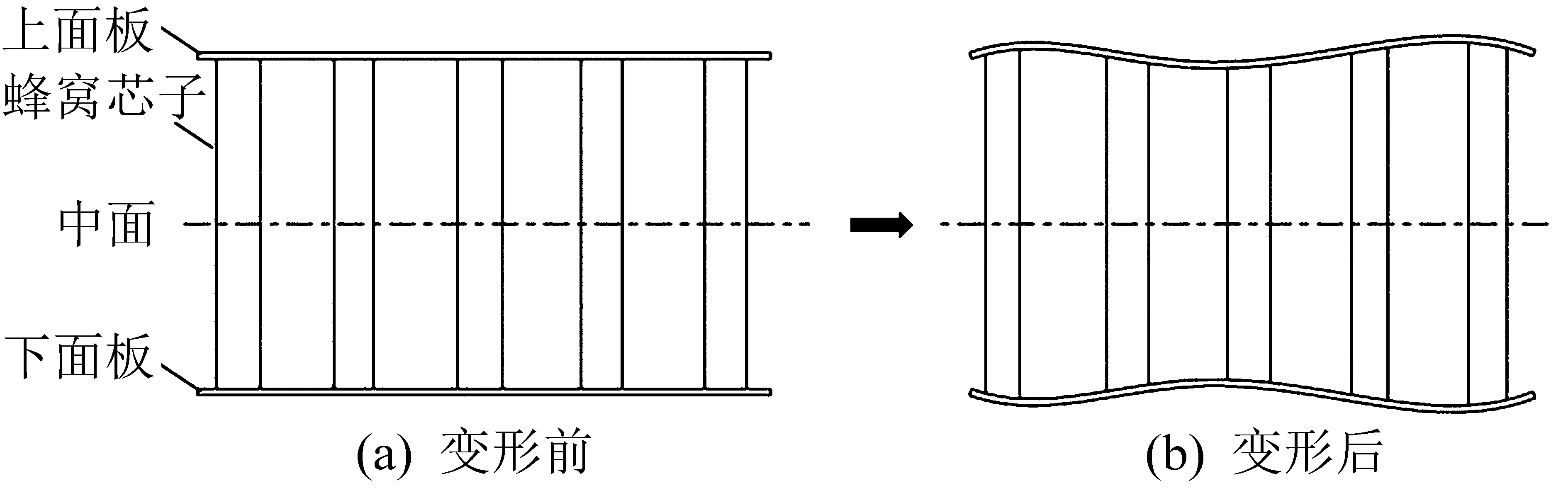
图2 蜂窝夹层板对称热变形示意Fig.2 Symmetrical thermal deformation of honeycomb sandwich plate
2 理论分析
2.1 假设
在对蜂窝夹层板对称热变形进行理论分析时,作出如下假设:
(1)上下面板视为薄板[8],其在小挠度弯曲时正应变εz=0,横向剪切应变γxz=γyz=0。
(2)蜂窝芯子较软,忽略平行于中面的应力分量,即正应力σx=σy=τxy=0。
(3)蜂窝芯子发生关于中面对称的横向胀缩,须考虑其横向的正应力、正应变,即σz≠0、εz≠0,芯子横向剪切变形γxz=γyz=0。
2.2 控制方程及其解
根据对称性,取蜂窝夹层板一侧的面板为研究对象,其横向弯曲挠度记作w。根据2.1节的假设(1),面板小挠度弯曲时的微分方程为
Df4w=qT
(2)

qT=-σcz
(3)
对于蜂窝芯子,其横向应变
(4)
由假设(2)、(3)可知蜂窝芯子热变形时的物理方程为
(5)
式中:αcz为蜂窝芯子横向热膨胀系数,Ecz为蜂窝芯子横向弹性模量。
联立式(4)(5)得到
(6)
式(6)(3)代入式(2)中,得到面板热弯曲的控制方程为
(7)
航天器蜂窝夹层板周边通过预埋件实现连接,一般将其视为四边简支,边界条件为挠度和弯矩为零。此时,式(7)挠度w的级数解为
(8)

由式(8)解算出各点的挠度值后,可采用最小二乘法拟合出面板的法向量,来表征光轴指向的变化。
3 试验验证
设计如图3所示的热变形试验,采用数字近景摄影测量光轴指向的变化[4],并与理论计算结果进行比较。方形蜂窝夹层板四周采用螺钉连接到“回”字形试验工装上,在蜂窝板和工装之间设计玻璃钢隔热垫,蜂窝板上下面板均匀布置加热片,通过控制热流密度实现平面温度场的模拟,采用红外测温仪获得具体测点的温度。两台数字照相机位于立柱上,视场覆盖整个蜂窝夹层板,蜂窝板上6-M6螺纹孔是遥感仪器安装孔,在每个安装孔附件粘贴靶标,作为热变形试验过程中的测点。该热变形试验中蜂窝夹层板尺寸500 mm×500 mm,厚度30 mm,蜂窝芯子边长5 mm,壁厚0.03 mm。
以常温条件为基础工况,测出面板法向量作为光轴初始指向。根据航天器在轨热分析和遥测数据,制定了高温和低温两种典型试验工况。采用加热片给蜂窝板加热,待温度场稳定后测量指向的变化,结果如表1所示。
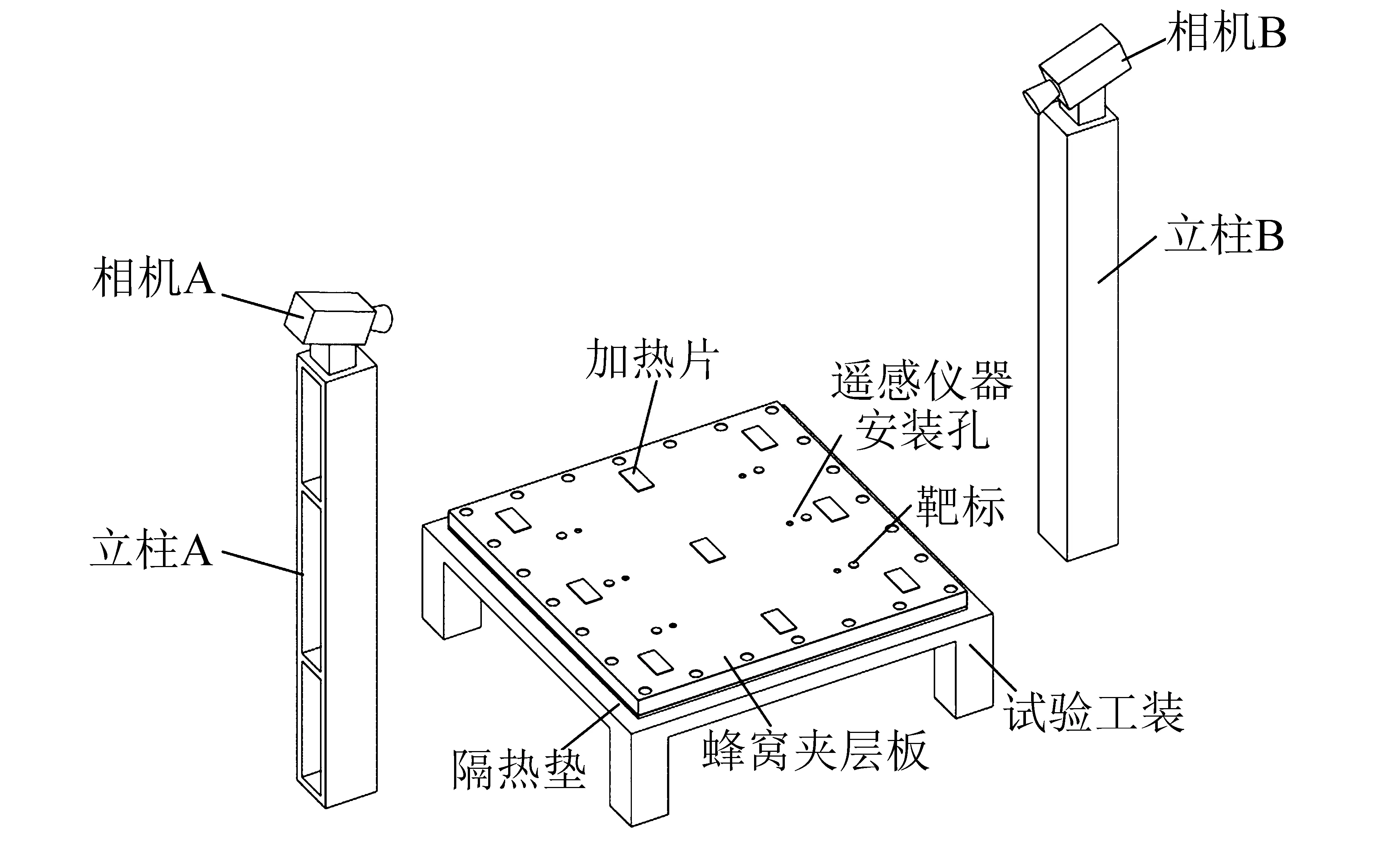
图3 热变形试验及测量方案示意Fig.3 Thermal deformation test and measurement表1 蜂窝夹层板对称热变形结果Table 1 Symmetrical thermal deformation results
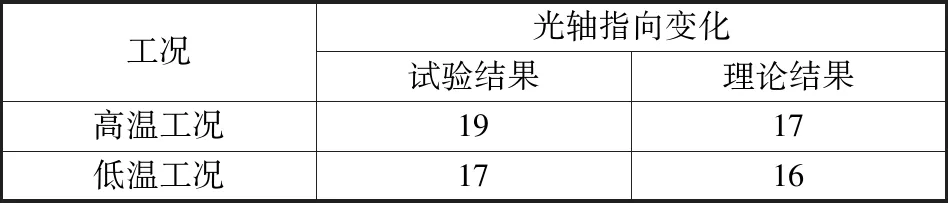
(″)
理论计算结果与热变形试验结果一致性较好,表明该理论方法能有效解决蜂窝板对称热变形问题。因此,可采用理论分析来预示蜂窝芯子参数对热变形的敏感性。图4与图5给出了高温工况下,光轴指向随芯子高度、横向弹性模量的变化趋势。
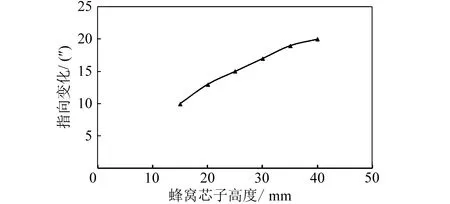
图4 蜂窝芯子高度对光轴指向变化的影响Fig.4 Influence of honeycomb core’s height on optical axis pointing
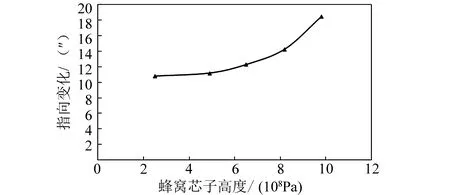
图5 蜂窝芯子横向弹性模量对光轴指向的影响Fig.5 Influence of honeycomb core’s transversal modulus on optical axis pointing
航天器铝蜂窝夹层板厚度一般为15 mm、20 mm、25 mm、30 mm和40 mm等规格。从图4可以看出,当蜂窝芯子逐渐变高时,指向变化由10″增加到20″,选用较矮的蜂窝芯子可以减小热变形的影响。
正六边形铝蜂窝芯子的参数用胞元l×ts表示,航天器工程中常用的规格有6 mm×0.08 mm、6 mm×0.06 mm、5 mm×0.05 mm、5 mm×0.04 mm、5 mm×0.03 mm、4 mm×0.04 mm等。随着蜂窝胞元边长和壁厚变化,芯子横向弹性模量Ecz可在0.3~1.3 GPa范围变化[9]。图5表明随着蜂窝芯子横向弹性模量的增大,指向变化由11″增加到19″,选用相对稀疏的蜂窝芯子降低横向弹性模量,可以减小热变形的影响。
4 结束语
本文面向某太阳同步轨道遥感卫星,针对光学遥感仪器安装板建立了对称热变形问题理论模型;同时设计了热变形试验,采用数字近景摄影测量光轴指向变化;综合两种研究方法得出如下主要结论:①理论计算结果与试验结果一致性较好,表明该理论方法可用于遥感卫星夹层结构在轨热变形预示。②依据某低轨遥感卫星热分析和在轨遥测数据,开展了遥感仪器安装板地面高低温工况热变形试验,指向变化在20″左右,可作为卫星在轨热变形量级的参考依据。③在进行遥感仪器安装板结构设计时,考虑热变形约束,根据蜂窝芯子参数对夹层结构热变形的敏感性分析,高度20 mm、胞元边长5 mm、壁厚0.03 mm的蜂窝芯子是较为合适的夹层结构规格,其既满足力学承载的要求,又可降低热变形的影响。