一种双组元推进系统极性测试方法及应用
2019-07-31于杭健舒燕孙迎霞黄昊张伍
于杭健 舒燕 孙迎霞 黄昊 张伍
(1 北京空间飞行器总体设计部,北京 100094) (2 上海空间推进研究所,上海 201112)
极性是指产品特定的安装方向、连接对应关系、介质流向关系。极性是航天器推进系统关键特性之一[1]。推进系统极性错误会使航天器任务性能严重下降,甚至导致任务失败。推进系统极性测试方法是航天器一直以来探索和使用的验证手段,以期达到推进极性的有效确认[2-3]。
目前,航天器双组元推进系统极性测试均在总装总测过程中[4-5],采取用手触摸推力器喷口感知,将推力器喷出气体通入装有酒精的试管,推力器喷口绑扎气球或者用手触摸推力器阀门等方式判断,上述通过目视、听声音、手触摸等方法进行判断,虽然取得了一定的技术积累,部分方法和技术形成了相应规范和协议,具备一定的指导意义,部分技术方法的规定在设计、生产、测试中有借鉴价值,但是仍然存在误判、漏判等风险,存在测试方法不完善的问题[6]。
本文设计了一种双组元推进极性测试系统,制定了极性测试方法,通过流量传感器采集推力器喷气数据,对双组元推进系统姿轨控氧燃隔离,姿控管路分支极性,姿轨控发动机入口氧燃管路连接极性的正确性,控制指令与各姿轨控发动机喷气动作的对应性进行了全面有效的确认,更好地解决了航天器双组元推进极性确认问题,通过具体的航天器推进系统极性测试,验证了极性测试系统及测试方法的正确性、有效性。
1 测试需求及分析
航天器双组元推进系统极性测试需要解决的问题为确认氧化剂路(以下简称“氧路”)与燃烧剂路(以下简称“燃路”)隔离,姿控管路分支一一隔离,自锁阀与压力传感器对应正确,控制指令对发动机动作一一对应正确,发动机入口氧燃管路连接正确。为解决上述测试需求,在推进系统极性测试过程中,通过测试口充气,指令控制自锁阀与电磁阀动作,流量传感器采集喷气数据的方式,对推进系统极性进行测试。极性测试对氧路、燃路分别开展。氧路与燃路均包含姿控路测试与轨控路测试。因发动机入口氧燃管路连接正确测试需断开推进负载控制器(推进线路盒)器上电缆,所以需另外开展推力器入口氧燃管路连接极性测试和轨控发动机入口氧燃管路连接极性测试。
因此,极性测试共包含姿控氧路、轨控氧路、推力器入口氧燃管路连接、轨控发动机入口氧燃管路连接、轨控燃路和姿控燃路测试。其中,姿控氧路和姿控燃路测试项目均包括氧燃隔离,姿控管路分支极性,控制指令对推力器控制极性,自锁阀与相应传感器联动极性测试。轨控氧路和轨控燃路测试项目均包括氧燃隔离,控制指令对发动机控制极性,自锁阀与相应传感器联动极性测试。
一种典型双组元推进系统液路原理如图1所示[7-9]。以该双组元推进系统为例,推进系统极性项目及定义如下。
(1)自锁阀与相应传感器联动极性,自锁阀打开后,相应压力传感器(以下简称“压传”)响应。
(2)氧燃隔离,氧路充气后,氧路对应压传响应,燃路压传不响应。燃路充气后,燃路对应压传响应,氧路压传不响应。
(3)姿控管路分支极性,氧路各分支分别充气后,对应压传响应,其它分支不响应。燃路各分支分别充气后,对应压传响应,其它分支不响应(分支指推力器供给管路的支路)。
(4)发动机入口氧燃管路连接极性,发动机入口氧管路对应发动机氧阀,氧路充气,发动机氧阀开启,发动机正常喷气。
(5)控制指令对阀门、推力器、轨控发动机控制极性。
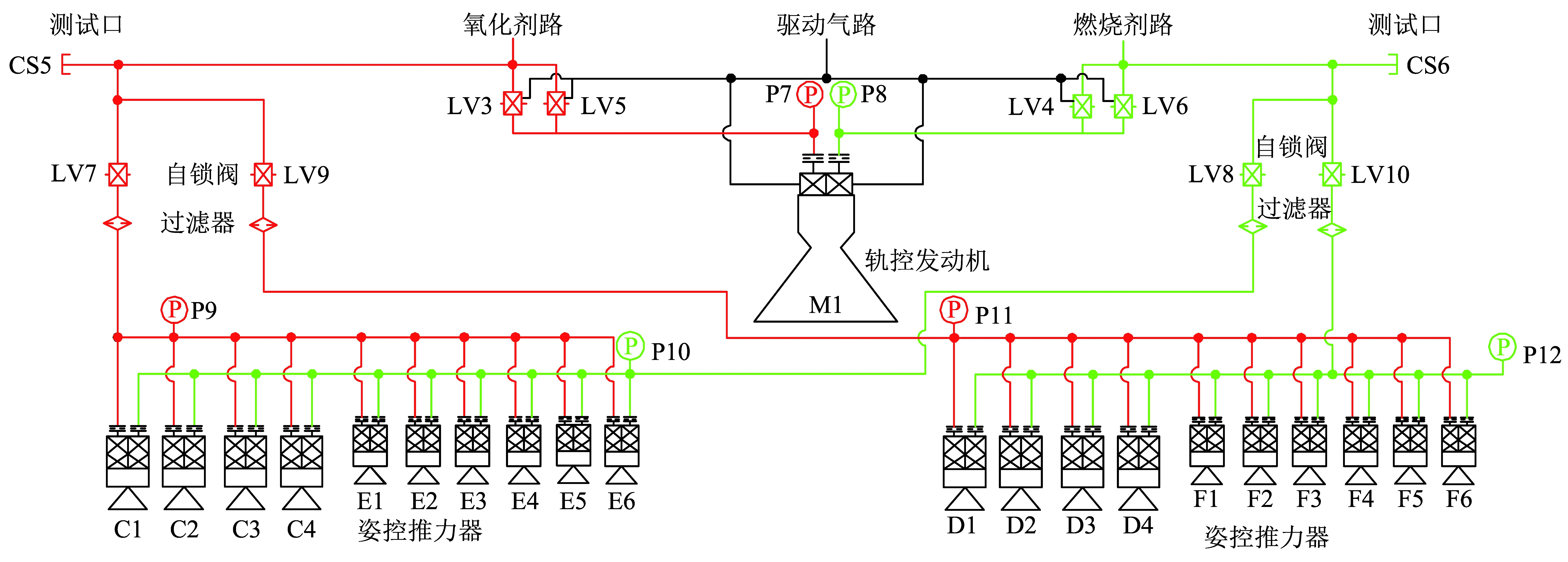
注:图中CSx为测试口,LVx为自锁阀,Px为压力传感器,Cx、Dx、Ex、Fx均为推力器,Mx为轨控发动机,红色管路为氧化剂路,绿色管路为燃烧剂路,黑色管路为气路。
图1 一种典型双组元推进系统液路原理图
Fig.1 Fluid schematic diagram of a typical bipropellant propulsion system
2 测试方法设计
航天器双组元推进系统氧路极性测试时,对氧路测试口充入氮气,燃路不充气,发送控制指令控制自锁阀与电磁阀动作,测试人员判读自锁阀动作后压力传感器响应及流量传感器采集推力器喷气数据,确认推进系统氧路极性的正确性。氧路极性测试包含姿控氧路极性测试,轨控氧路极性测试和推力器入口氧燃管路连接极性测试。燃路系统与氧路类似,本文不一一赘述。
2.1 姿控氧路极性测试方法
姿控氧路极性测试共7步,流程及判读方法如图2所示。
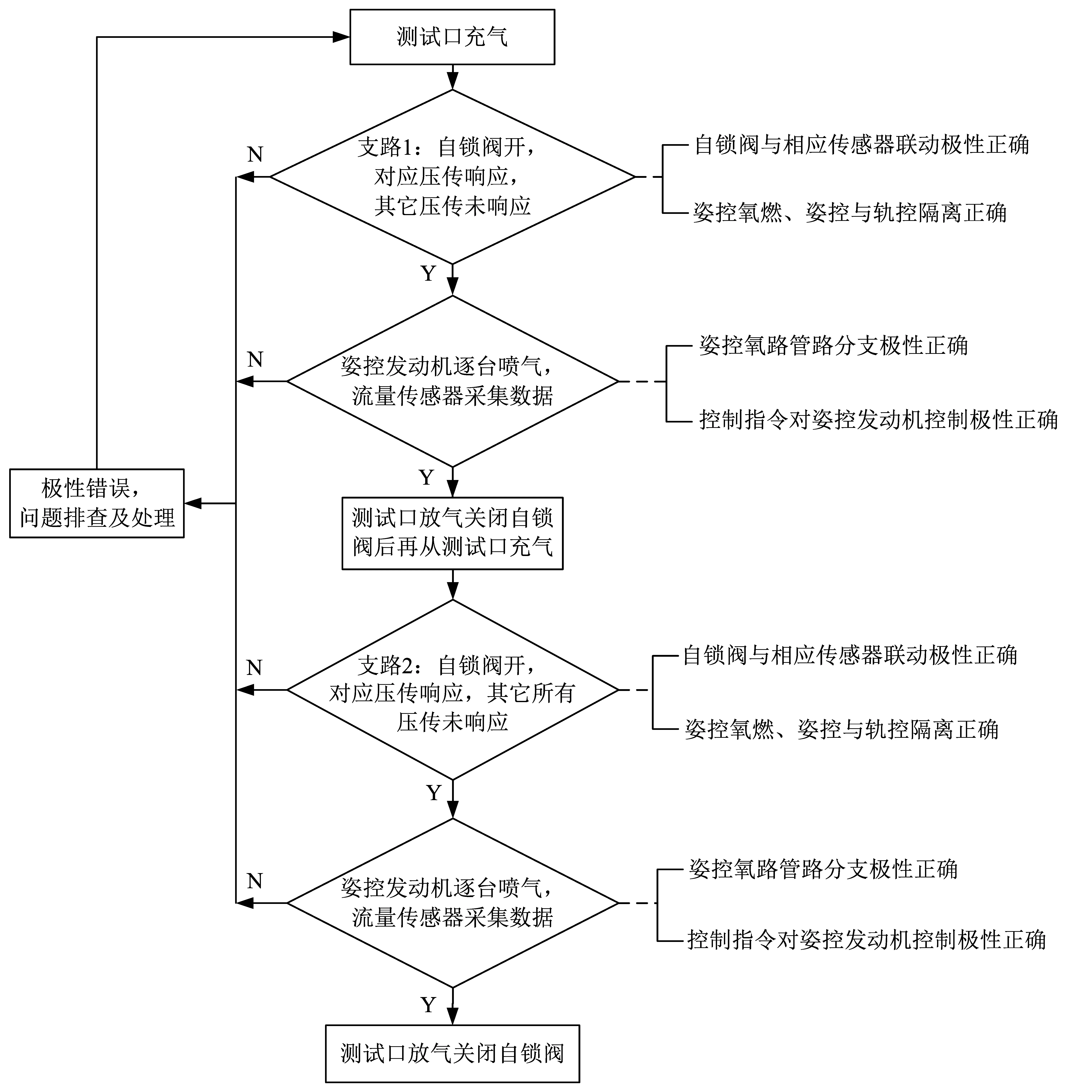
图2 姿控氧路极性测试流程及判读方法图Fig.2 Procedure and interpretation method schematic diagram of the attitude control oxidizer path polarity test
姿控氧路极性具体测试方法如下。
(1)依次打开姿控氧路自锁阀,在一个支路自锁阀开启(其余自锁阀关闭)条件下,对应分支压传响应,其它压传未响应,据此可判断姿控氧路自锁阀与相应压传联动极性正确,姿控氧燃、姿控与轨控隔离正确。
(2)在自锁阀开启(其余自锁阀关闭)条件下,依次进行所有推力器喷气,流量传感器采集喷气数据,自锁阀对应的分支推力器逐一正常喷气,单台推力器喷气正常时,其余所有推力器未喷气,可判断姿控氧路管路分支极性正确。
2.2 轨控氧路极性测试方法
轨控氧路极性测试共7步,测试流程及判读方法如图3所示。轨控氧路极性具体测试方法如下:依次打开轨控路自锁阀,在自锁阀开启(其余自锁阀关闭)条件下,对应分支压传响应,其它压传未响应,可判断轨控路自锁阀与相应传感器联动极性正确,轨控氧燃、轨控与姿控隔离正确;轨控发动机开机,开机过程中对应压传压力下降,采集所有推力器喷气数据,推力器均未喷气,可判断控制指令对轨控发动机控制极性正确。
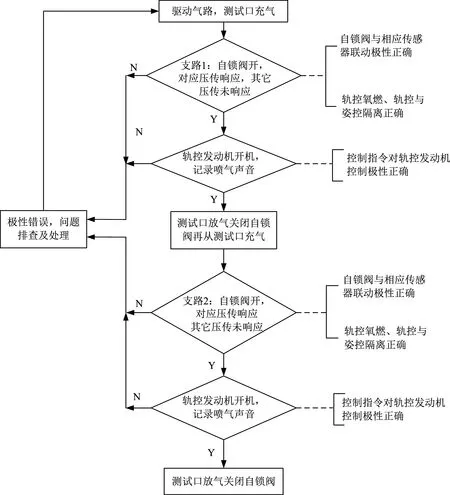
图3 轨控氧路极性测试流程及判读方法图Fig.3 Procedure and interpretation method schematic diagram of the orbit control oxidizer path polarity test
2.3 推力器入口氧燃管路连接极性测试方法
推力器入口氧燃管路连接极性测试共6步,测试流程及判读方法如图4所示。
推力器入口氧燃管路连接极性具体测试方法如下。
(1)断开推进负载控制器(推进线路盒)器上电缆,串入转接盒,断开所有姿控燃阀回线节点。
(2)氧路测试口充气,依次进行所有推力器喷气,流量传感器采集数据,单台推力器动作时,其它所有推力器均未喷气,可判断推力器入口氧燃管路连接极性正确,控制指令对推力器控制极性正确。
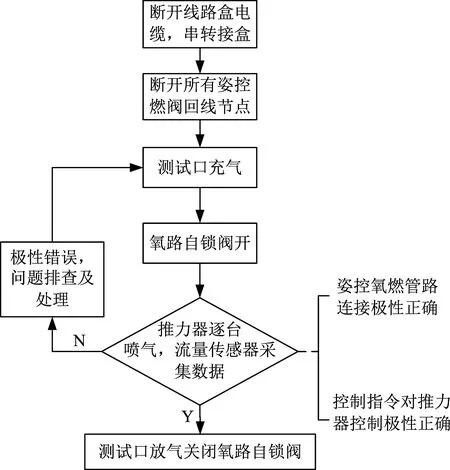
图4 姿控氧燃管路连接极性测试流程及判读方法图Fig.4 Procedure and interpretation method schematic diagram of the attitude control oxidizer-fuel pipe connections
3 测试系统设计
为达到推进系统极性确认的目的,采用流量传感器来采集推力器喷气数据。由于推力器为拉瓦尔喷管,必须设计采集工装,将推力器喷口与流量传感器连接,对推力器喷出的气体进行收集,通过流量传感器测量,测试软管用于连接流量传感器与采集工装。测试电缆将航天器不同象限的流量传感器采集流量数据汇集,流量采集设备将流量传感器的流量数据转换为电压数据显示,便于进行判读。
推进极性测试系统由采集工装、测试软管、流量传感器及测试电缆、流量采集设备等组成。测试系统连接关系如图5所示。
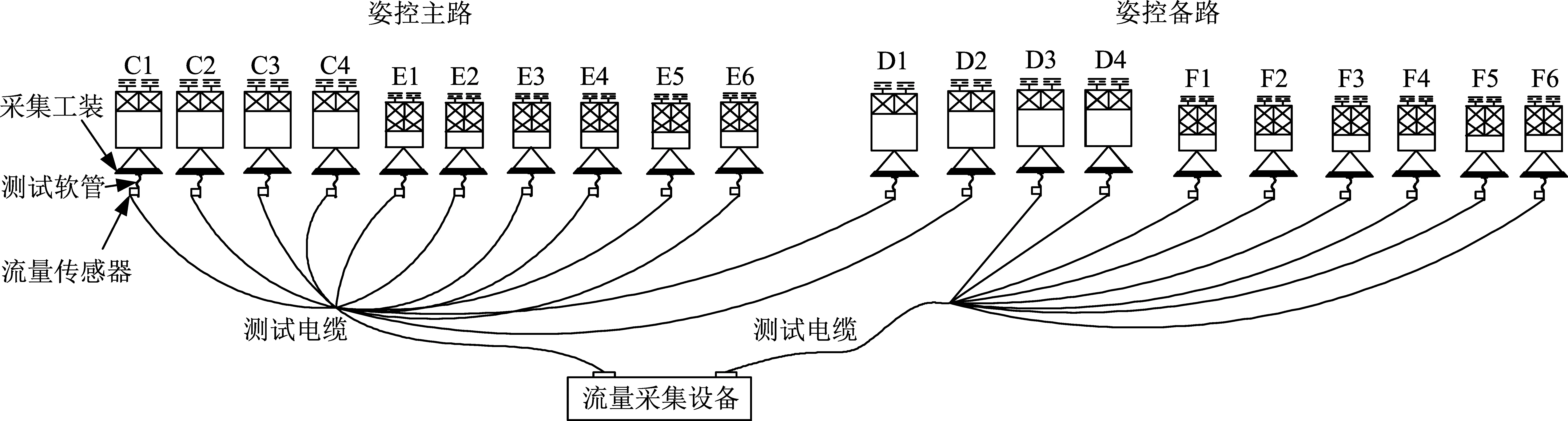
图5 推进极性测试系统及连接关系示意图Fig.5 Propulsion polarity test system and connection diagram
采集工装利用推力器保护罩直接工艺改造形成,推力器保护罩底部开圆孔,软管固定接嘴通过3M胶带与保护罩连接、固定,软管固定接嘴与测试软管连接,测试软管与流量传感器连接,通过流量采集设备采集推力器喷气数据。
测试过程中,流量传感器将从推力器喷出的气体转换为1~5 V电压,通过采集板卡将电压采集显示到流量采集设备界面上,同时判断电压是否大于阈值,若大于阈值,表明传感器有气流通过,采集设备界面上对应通道变亮(即推力器正常喷气),若采集电压不变,表明传感器无气流通过,界面上对应通道保持不变(即推力器未喷气)。
4 工装验证及参数选取
为保证推进系统极性测试过程中不危害航天器上产品安全,固化采集工装安装工艺,同时探索测试压力范围,开展了地面工艺试验,确定了采集工装的安装工艺,确定了测试压力及喷气时长。测试过程中流量采集设备判断阈值设置为1.5 V,均通过流量采集设备采集到了有效的喷气数据。
工艺试验采用与真实推力器状态一致的产品开展试验。地面配气台通过管路直接与推力器喷注器管嘴连接,手动控制配气台减压阀以保证推力器入口压力,采集工装与流量传感器及采集设备连接。
工艺试验结果如图6所示。结果表明:推力器入口压力在0.1 MPa~0.3 MPa内可采集到有效喷气数据,入口压力≤0.3 MPa时,采集工装不会移动,不会对推力器涂层造成损伤,压力为0.4 MPa时采集工装轻微滑动,压力为0.5 MPa时采集工装明显滑动,压力为0.8 MPa时采集工装未与推力器脱离,气体从豁口泄出。此外,推力器竖直或水平放置状态不会影响上述试验结果。
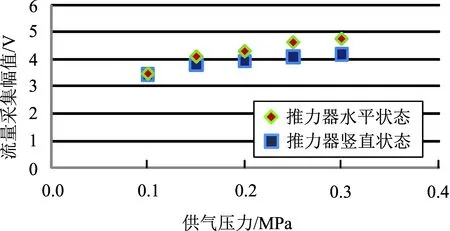
图6 地面工艺试验结果Fig.6 Ground process results
5 测试验证
在某航天器上开展了推进系统极性测试。测试过程中采取先氧路后燃路,氧路测试中先姿控路后轨控路的方式,通过整合测试流程,最大程度的避免航天器上管路的重复操作,提高了测试安全性,同时也避免了航天器地面充气设备重复充放气,提升了经济效益。测试具体过程如图7所示。
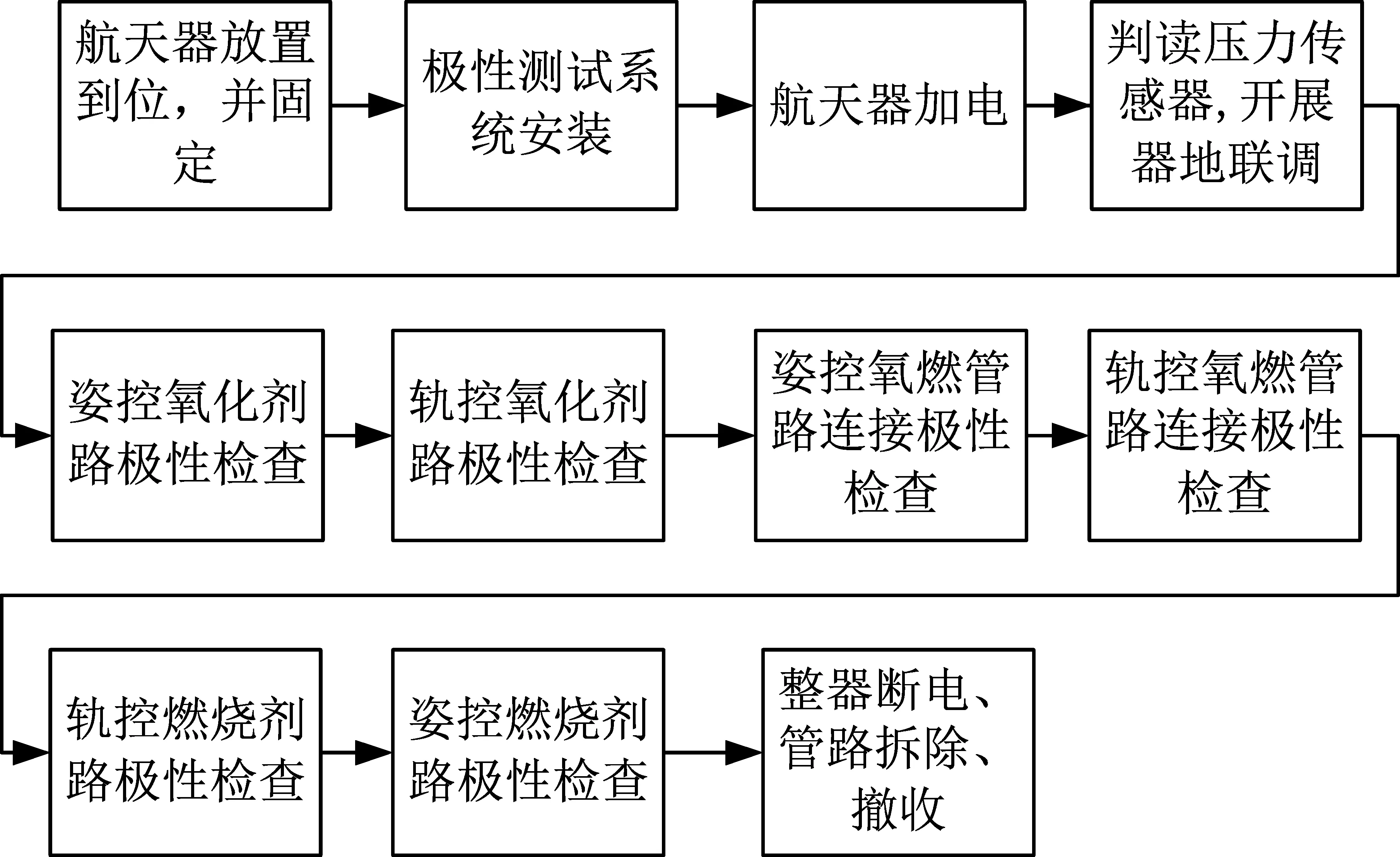
图7 推进极性测试过程Fig.7 Test process of propulsion system polarity
5.1 姿控氧路极性检查结果
姿控路一路自锁阀动作前后压传遥测变化见表1。从表1中可知,自锁阀打开后,对应路压传由常压变为0.196 MPa,其余路压传保持不变,因此自锁阀与相应传感器联动极性正确,姿控氧燃、姿控与轨控隔离正确。

表1 一路自锁阀动作后压传遥测变化Table 1 Pressure sensor telemetry collection results after one locking valve action
逐一打开推力器,采集所有推力器喷气数据,确认动作推力器采集幅值超过阈值并触发,未动作推力器采集幅值稳定,无变化。一台推力器喷气后采集结果见表2,测试结果见图8。由于测试口持续供气,推力器动作后,压传数值保持不变。
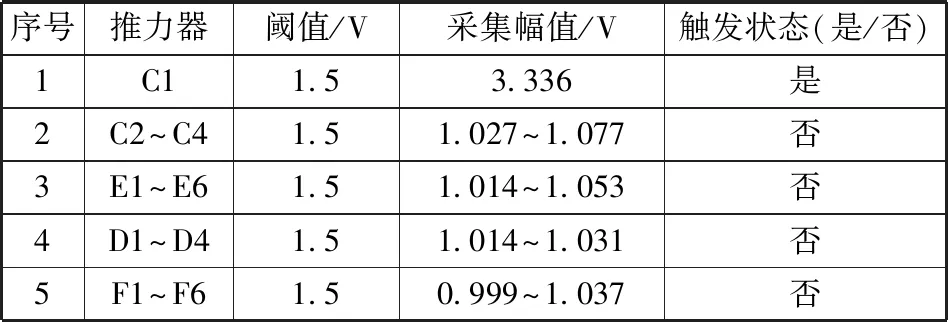
表2 一台推力器喷气后采集数据表Table 2 A thruster after jet acquisition data

图8 一路自锁阀动作后推力器喷气采集结果Fig.8 After a self-locking valve action thruster jet acquisition results
从表2中可以看出,一台推力器喷气时,其它所有推力器均未喷气,主路推力器喷气时,备路推力器均未喷气,结果表明姿控氧路管路分支极性正确,控制指令对推力器控制极性正确且具有排它性。幅值不同是由于推力器规格不同及入口压力的差异,不同推力器采集的幅值存在差异。
5.2 轨控氧路极性检查结果
轨控路自锁阀动作前后压传遥测变化见表3。从表3中可知,自锁阀打开后,对应路压传由常压变为0.393 MPa,其余路压传保持不变,因此自锁阀与相应传感器联动极性正确,轨控氧燃、轨控与姿控隔离正确。

表3 自锁阀动作后压传遥测值汇总Table 3 pressure sensor telemetry summary after self-locking valve action
轨控发动机开机,确认所有推力器采集幅值均无变化。结果表明轨控氧燃、轨控与姿控隔离正确。
5.3 推力器入口氧燃管路连接极性检查结果
测试过程中逐一打开推力器,采集所有推力器喷气数据,此时,由于燃阀回线节点断开,因此推力器开启指令实际上只控制氧阀开启,燃阀仍然为关闭状态。单台推力器喷气时,其余所有推力器均未采集到喷气数据,单台推力器喷气结果和所有采集结果见图9。可判断推力器入口氧燃管路连接极性正确。

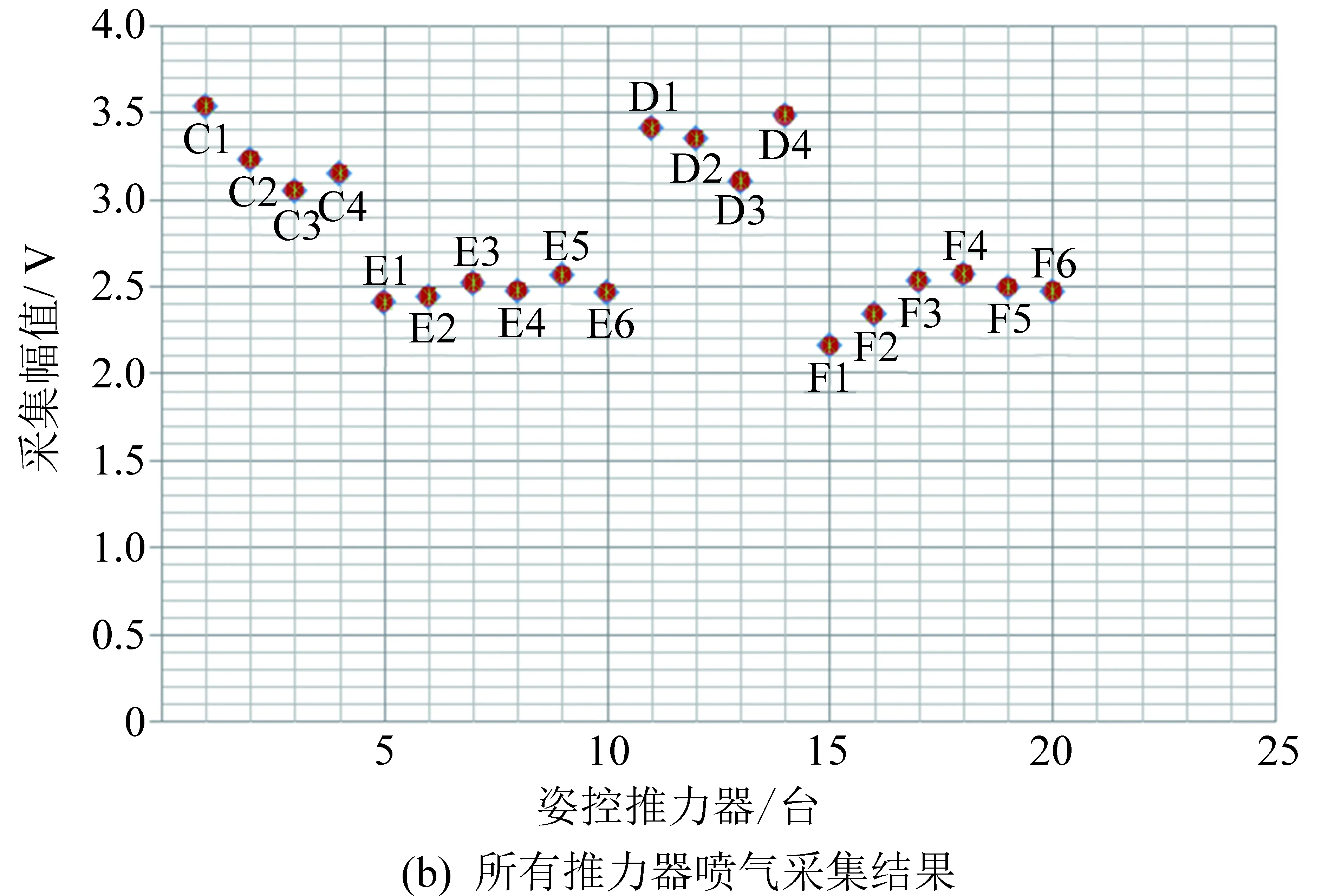
图9 推力器喷气后采集界面Fig.9 Thruster jet acquisition results
6 结束语
本文通过测试需求分析,提出了推进系统极性测试确认方法,设计了极性测试系统,并通过航天器测试任务验证了测试方法及系统的正确性、有效性。提出的推进系统极性测试确认方法及测试系统,更好的完成了航天器双组元推进系统极性测试,成功应用于航天器测试任务,测试结果满足任务需求,解决了极性测试方法不完善的问题,避免了推进系统极性测试过程中误判、漏判等风险,可为航天器双组元推进系统极性测试提供参考。