基于Halbach阵列作动器的柴油机低频振动传递控制
2019-07-30俞孟萨翁震平
王 飞,俞孟萨,翁震平,何 琳,李 彦
(1.船舶振动噪声重点实验室,江苏 无锡 214082;2.武汉第二船舶设计研究所,武汉 430064;3.船舶振动噪声重点实验室,武汉430064)
0 引 言
机械噪声是民用船舶和舰艇的主要噪声源,而柴油机则是机械噪声的主要贡献者,对其振动进行控制一方面可以降低其本身的辐射噪声,另一方面可以降低其通过基座传递给甲板或者潜艇壳体的振动,继而降低壳体声辐射。
Fischer等[1]以两级隔振系统为对象讨论了此噪声的传递路径及如何最小化其影响的措施,同时还对具有开放和封闭底部的浮筏及完全封闭的发电机组所产生的噪声进行了讨论。结果表明若不存在侧翼机载噪声,则隔振效果取决于安装系统的刚度及浮筏与设备的重量比。而有限的测试结果表明在发电机组下方放一个简单的屏障即可有效降低机载侧翼噪声,在200 Hz以上的频率范围内提高隔振效果。Clunis和Bradley[2]对60 kW柴油发电机噪声和振动隔离系统的设计进行了概略性的讨论,内容则包括设计目标、测试和器件研制等。Zhang等[3]对航空和航海中的常见振源和隔振措施进行了分析。就理论而言,当设备的振动频率高于隔振设备的倍时效果最佳,从而对于低频振动采用完全的被动隔振措施是不合适的。Giua等[4]所提出的半主动隔振两步设计方法能够尽可能地使控制力接近目标控制力;另外,其在文中还讨论了弹簧和阻尼器的非线性特性以近似目标主动控制律。Ahuja和Gupta[5]提出了一种针对浮筏利用电流变液阻尼器实现的可变阻尼的半主动控制方案。通过分析激励信号特性设计模糊逻辑控制器获得最佳隔振效果。所设计的半主动控制系统在时变信号下,每个时间区间对应一个不同的最优阻尼比。MATLAB仿真结果表明相比被动隔振措施该控制方案更为有效。Johnson和Daley[6-7]设计了一种在500 Hz以下对安装位置的局部位移呈现零刚度特性的作动器-智能弹簧(Smart Spring),实验表明其对于降低传递到壳体上的振动及衰减辐射噪声具有比较重要的应用价值。Daley等[8]提出了一种重复控制算法,并将其应用到由“Smart Spring”构成的主动基座,借助干扰信号的周期特性,所提出的算法融合零相移滤波可以在目标频率获得50 dB的隔振效果。Yang等[9]通过同步控制调整安装在浮筏上的多个旋转或往复设备的相位以最小化从浮筏传递到类壳结构上的振动。实验结果表明可以降低安装在类壳结构上的22个误差传感器的加速度响应的均方和13.2 dB并在某些谐波频率取得最高达51 dB的振动控制效果。Li等[10]对于将主动振动控制技术应用于Collins级潜艇的隔振基座上的可行性进行了研究,结果表明对于发动机的转速频率和一次、二次谐波分别可以取得88%,95%和97%的控制效果。Gabbert和Ringwelski[11]使用压电材料对四缸柴油机进行振声控制,建立包括柴油机、压电作动器、声流体、振声耦合和控制器影响在内的有限元模型,接着基于复特征值分析对含有大量自由度的FE模型进行降阶操作,继而将得到的模型变换为状态空间模型,以方便实施复杂的控制算法。仿真与实验结果均验证了所建模型与控制策略的有效性。Olsson[12]从发动机稳态和暂态内部激励和对象非线性方面考虑发动机主动隔振问题。所用的控制策略以激励的主要谱成分为控制对象,并使用干扰状态估计的反馈实现窄带隔振,可在发动机不发生大的偏移的情况下在稳态和暂态均实现满意的力传递控制。
1 柴油机低频振动传递控制系统
在工况一定的情况下,柴油机低频线谱虽然复杂,但是却是稳态的,适宜于使用前馈控制。相比反馈控制,前馈控制系统完全稳定,不需要考虑控制系统的失稳可能。
在振动噪声的前馈控制中,LMS和RLS是两种比较常用的算法。其中RLS算法适宜于信号稳定且自相关矩阵具有较宽范围的特征值的场合。显然柴油机的低频振动不满足这种情况,因此在此使用LMS算法对柴油机低频振动传递进行控制。
LMS算法的基本原理是与其利用梯度的平均估计间断更新滤波器系数,不如在采样时利用梯度的瞬时估计更新梯度(即所谓的统计梯度),这个更新量等于瞬时误差e()n对滤波器系数w的导数,即

其中:x()n为参考输入信号。

其中:α=2 μ是收敛系数,一般α的取值满足以下条件即可保证算法的收敛性。

其中:λmax是的最大特征值,其中等于即x(n)的均方值,在实践中一般可以通过平均过从而,自适应算法变为去I个数据点得到。
本文的控制对象是WD618船用柴油机(图1),其各项指标为:额定转速1 500 r/min,额定功率220 kW,怠速为650 r/min。进气方式为增压中冷,属于水冷、直列、四冲程型。气缸数为6,气缸直径126 mm,活塞行程155 mm,采用水冷强制循环。排量 11.596 L,净重 1 100 kg,主尺度 1 488 mm×872 mm×1 258 mm。
对其低频振动进行控制所采用的作动器是基于Halbach阵列研发的主被动混合隔振器(BK17AVI1500),如图2所示。Halbach阵列是工程上的近似理想结构,基于这种磁体结构可在保证有效作动的情况下大幅缩小作动器的体积与重量,且Halbach磁阵列所具有的高功率密度特性可大幅降低功率消耗。其各项指标为:尺寸210 mm×210 mm×300 mm,重量45 kg,有效推力1 500 N,峰值推力2 000 N,额定功耗:900 W,可承受静载荷:400 kg。安装方式如图3所示。

图1 WD618船用柴油机Fig.1 WD618 diesel for ships

图2自研的基于Halbach阵列主被动混合隔振器Fig.2 Self-developed active-passive isolator based on Halbach array

图4额定工况下柴油机、机脚、安装基座及甲板 的振动情况(三分之一倍频程) Fig.4 The vibration levels of diesel,feet,base and deck under nominal work condition(1/3 Oct)
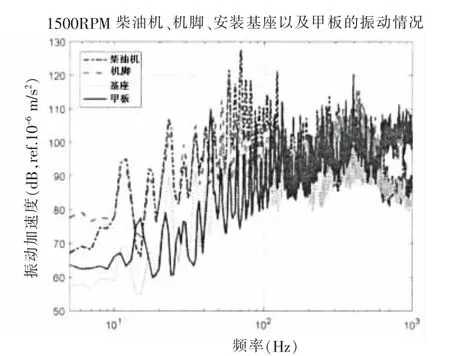
图5额定工况下柴油机、机脚、安装基座及甲板 的振动情况(线谱)Fig.5 The vibration levels of diesel,feet,base and deck under nominal work condition(linear spectra)
额定工况下柴油机、机脚、安装基座及甲板的三分之一倍频程和线谱分别如图4和图5所示。
从图中可以发现:
(1)即使不开主动控制,BK17AVI1500型主被动混合隔振器的被动元件仍对柴油机振动有大约20 dB的隔振效果;
(2)甲板的振动在200 Hz以下小于基座振动,但是高于200 Hz时会逐渐大于基座振动;
(3)柴油机、机脚、安装基座及甲板的振动强度均在60 Hz作用达到最高。
(4)柴油机振动线谱复杂,不仅在柴油半级的谐波上12.5,25,37.5,50,...Hz有峰值,而且在两个半级谐波之间也有峰值,给柴油机的低频线谱控制增加了难度。
2 控制器参数设计
使用LMS算法需要对LMS的结构进行设计,即确定合适的滤波器系数和步长,方法是通过实测数据的仿真计算结果进行确定,
由于被动隔振元器件在高频已经具有较优的隔振效果,所以在此将主动控制的关注频率范围定在200 Hz以下。

图7期望信号和经低通滤波后的期望信号Fig.7 Signals of desired and after low pass filtering
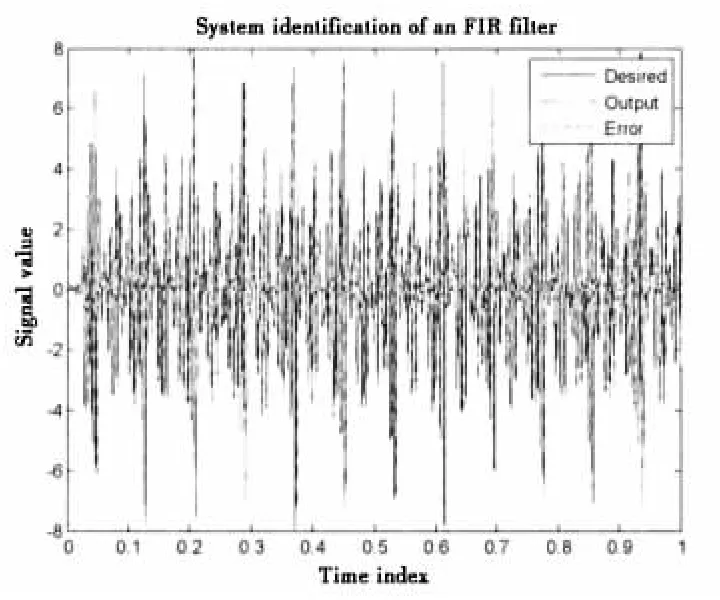
图8经LMS控制后的控制信号、期望信号和误差信号曲线(μ=0.000 2,N=256)Fig.8 Comparison among control output,desired signal and error(μ=0.000 2,N=256)

图9期望信号和误差信号的频谱对比 (μ=0.000 2,N=256)Fig.9 Comparison between desired signal and error in frequency domain(μ=0.000 2,N=256)
首先对参考信号和期望信号进行低通滤波,将柴油机的垂向振动作为参考信号,基座的振动信号作为期望信号,以额定工况(1 500 RPM)为例,则滤波结果分别如图6和图7所示,可以发现经低通滤波后,高于低通滤波器设定频率(200 Hz)的信号已经被去除,方便下一步的控制。
在MATLAB中利用LMS进行仿真计算,则期望曲线和经LMS控制后的控制输出曲线、误差曲线的时域和频域对比分别如图8和图9所示。
当μ=0.000 2时,滤波器系数对误差的影响如图10所示;进一步增加滤波器系数,系统将变得不稳定,即滤波器系数并不是越多越好。
滤波器系数N=256时步长对误差的影响如图11所示,可见减小步长并不一定会减小误差,而增加步长到一定程度又会使得系统不稳定。

图 10 μ=0.000 2时滤波器系数对误差的影响Fig.10 The effect of filter coefficient on error(μ=0.000 2)

图11 N=256时步长对误差的影响Fig.11 The effect of step on error(N=256)
综合图10和图11可以将LMS的滤波器系数和步长分别设为256和0.000 2。
200 Hz以下主动隔振与被动隔振的效果对比如图12所示,其中AVI-Stiffness表示不开主动控制情况下仅使用弹性元件的隔振效果,可以发现:
①使用LMS自适应前馈控制可以在控制作用频带取得相比被动隔振更优的隔振效果;
②使用LMS并不能在所关注的频率范围内,对所有的频率均取得相同的控制效果,而是有的控制效果很好,有的则稍好于被动隔振,甚至在某个频率不如被动隔振。这些均与此频率在参考信号中所占的比重有关,即与其所在原信号中的能量占比有关,占比越大,滤波器系数在迭代中对此的侧重就越大,则控制效果也就越好。
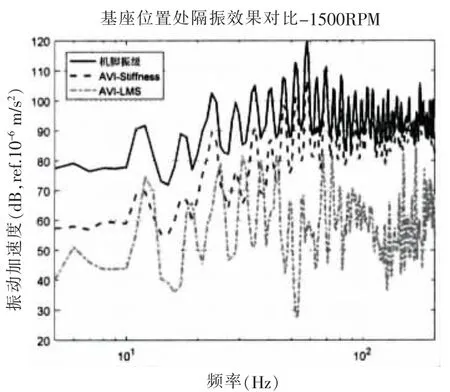
图12主动隔振与被动隔振仿真效果对比Fig.12 Vibration isolation effect comparison between active vibration control and passive control
3 实验验证
控制器和功率放大器分别采用自研的分布式前馈DSP控制器(图13)和1 500 W数字功率放大器(图14)。其中控制器专为分布式前馈控制设计,每个控制器含两个高速16位AD采集通道(分别用于采集参考信号和误差信号)和一个高速16位DA输出通道,微处理芯片采用TI公司的F28335DSP双核浮点处理器,主频150 MHz,可进行大数据量的分析和复杂算法的运算。1 500 W的数字功率放大器相比模拟功率放大器体积与重量大幅降低,由于BK17AVI1500作动器的额定功耗为900 W,在此使用可提供一定的安全裕度。
在DSP控制器中采用通过仿真计算得到的控制器参数,其中,考虑控制系统中所存在的群延时,步长应稍小于仿真确定的步长。对所采集的传感器数据进行抗混叠滤波和剔除异常数据操作,适当调整功率放大器的增益与控制器输出后,柴油机、隔振器基座、柴油机机脚及甲板的振动情况分别如图15-18所示。
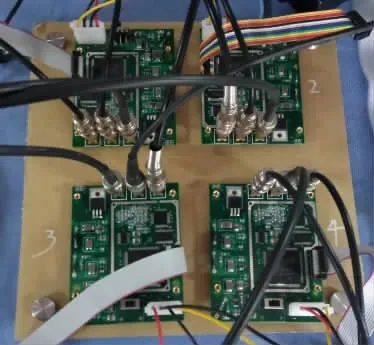
图13分布式前馈控制器Fig.13 Self-developed decentralized DSP controller

图14 1 500 W数字功率放大器Fig.14 Self-developed 1 500 W digital power amplifier
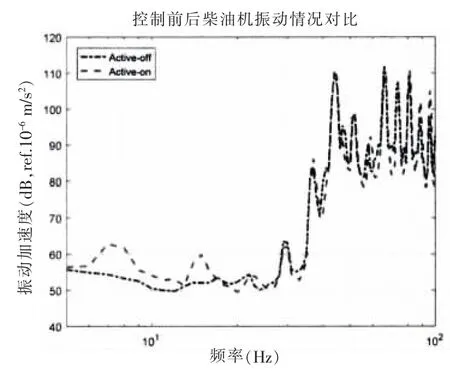
图15控制前后柴油机振动情况对比Fig.15 Vibration of diesel before and after control
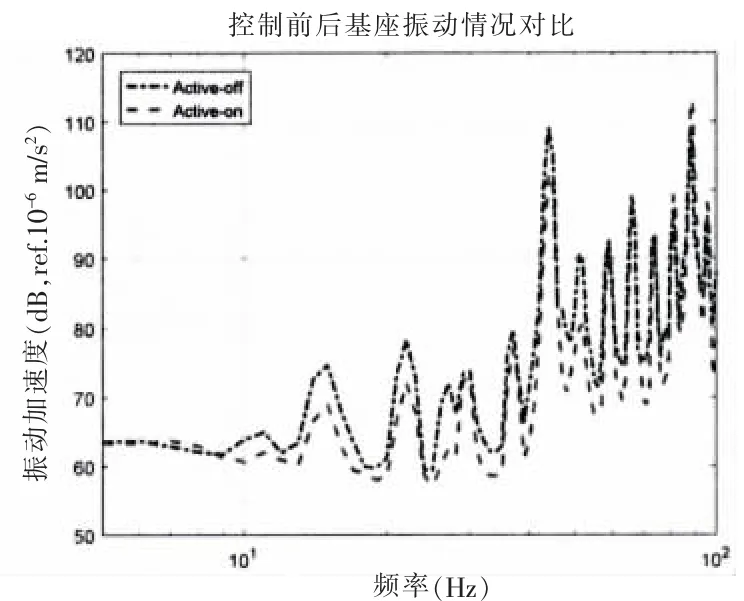
图16控制前后基座振动情况对比Fig.16 Vibration of base before and after control

图17控制前后机脚处振动情况对比 Fig.17 Vibration of diesel feet before and after control

图18控制前后甲板振动情况对比Fig.18 Vibration of deck before and after control
其中,在图15中,由于此时为了施加自适应前馈控制,所采集的柴油机振动数据事先经过了40-100 Hz的带通滤波器,虽然从图中可以看出40 Hz以下的振动相比图5大幅减小,但并不代表此时柴油机的真实振动情况。可以发现施加自适应控制后柴油机的振动在部分频率是增大的。
从图17可以发现,施加主动控制后,机脚处的振动在控制作动频率上也是增加的。
从图16和图18可以看出,使用低频线谱自适应控制策略以后,基座和甲板振动在控制作用频率上均得到抑制,取得7 dB左右的控制效果。
图19为基座位置处仿真结果与实测结果的对比,可以发现频率高于40 Hz时仿真的隔振效果要高于实测结果,这有可能是由于仿真时虽然用的是实测数据,但是却没有考虑作动器的输出对误差传感器及参考传感器的影响;而实验验证时这部分影响是真实发生的,降低了控制效果。

图19仿真结果与实测结果对比Fig.19 Comparison between simulation results and test results
4 结 论
本文首先对柴油机的低频振动特性进行了研究,继而使用LMS算法利用实测数据进行自适应控制仿真计算,一方面确定适宜DSP控制器使用的滤波器参数,另一方面确定理论上可达到的最优控制标准。最后借助自研的主动控制系统进行控制策略的实验验证,结果表明施加主动控制策略后,除柴油机及机脚位置处的振动在所控制的频率会有稍微增大外,基座及甲板振动在所关注的频率均有幅值不等的下降,证明使用主动控制方式对振动突出的线谱进行针对性控制是可行的。研究的下一阶段工作将集中于在控制器设计阶段综合考虑作动器对误差传感器和参考传感器的影响,同时对控制策略的鲁棒性和稳定性进行研究。
