船舶艉轴承刚度和螺旋桨陀螺效应对轴系回旋振动特性影响的分析
2019-07-30李小军朱汉华范世东郑良焱
李小军,朱汉华,范世东,郑良焱
(武汉理工大学 能源与动力工程学院,武汉 430063)
0 引 言
船舶轴系上旋转质量的不平衡离心力,以及来自不均匀伴流场、作用在螺旋桨上的流体激振力将使轴系产生回旋振动。回旋振动严重时将导致轴系运行不稳定,甚至影响船舶航行安全[1]。
一般滑动轴承的水平方向的刚度相对于垂直方向要低一些。随着船舶的大型化,船体尾部刚度逐渐下降,而螺旋桨质量和转动惯量却比较大。后艉轴承的位置比较特殊,起着支撑艉轴和螺旋桨的作用,其承受着来自螺旋桨剧烈的动载荷作用,工作条件恶劣,润滑状态不稳定,载荷呈边缘效应,甚至导致干摩擦,这些都会引起总支承刚度的变化[2]。因此对于大型低速船舶,为了保证轴系运转正常和船舶航行安全,进行尾轴承刚度各向异性下的轴系回旋振动研究是有必要的。
目前对于轴系回旋振动的研究,由于资料的缺乏,以及轴承刚度的难测性,大多是建立在刚性轴承、或者轴承刚度各向同性的基础之上的,而未将轴与轴承作为“柔性轴-柔性支撑”来进行研究;还有学者将其退化为横向振动进行研究,而忽略了螺旋桨在转子结构中产生的陀螺效应[3]。
陈之炎等[4]对回旋振动的机理进行了详细的研究,并从理论上讨论了支承刚度各向异性的情况。王磊等[5]借助有限元软件,分析了螺旋桨陀螺效应、应力刚化效应和旋转软化效应等对回旋振动的影响。
本文以某TEU集装箱船的推进轴系为研究对象,借助于有限元软件ANSYS,计入螺旋桨的陀螺效应,分析船舶推进轴系后艉轴承各向异性时回旋振动的特性,包括其固有频率、坎贝尔图临界转速和回旋振动响应。
1 考虑陀螺效应的轴系振动方程
根据弹性力学,对于轴系这样的多自由度弹性系统,其通用动力学运动方程为:

式中:[M]、 [C]和 [K]分别代表质量矩阵、阻尼矩阵和刚度矩阵;{u¨}、 {u˙}和 {u}分别代表加速度向量、速度向量和位移向量;{F}代表广义外力。
由于船舶螺旋桨的质量和惯量都比较大,会对轴系回旋振动产生较大影响,因此在轴系回旋振动的计算中需要考虑螺旋桨的陀螺效应。
当轴承各向同性时,螺旋桨的陀螺力矩:

式中:Jp为极转动惯量,Jd为径向转动惯量,j0为转动惯量比为频率比可知,陀螺力矩包含2项为哥氏惯性力矩为牵连惯性力矩。陀螺力矩为正值时,其方向与转轴旋转方向相反,减少了轴系的弯曲变形量,相当于轴的弯曲刚度变大了,轴系的固有频率因此增加;反之,则使轴系的固有频率下降。
当轴承支承刚度各向异性时,其陀螺力矩为:

式中:x方向为轴线方向为z方向的转角速度为z方向的转角加速度;同理为y方向的转角速度为y方向的转角加速度。

式中:[Ggyr]为陀螺效应矩阵,主要取决于自转角速度ω,与公转角速度Ω无关[6]。[]B为旋转阻尼矩阵,在低转速下影响较小,在本文中不计入。
在有限元软件ANSYS的固定坐标系中,计入螺旋桨陀螺效应后的转子的动力方程为:
2 分析模型
2.1 轴系主要参数
本文采用的研究对象是某TEU船推进轴系,轴系从主机至螺旋桨全长47.763 m,中间轴轴径为795 mm,艉轴外径975 mm,内径330 mm,含三个中间轴承和一个前艉轴承、一个后艉轴承。螺旋桨为6叶定距桨,根据Jasper给出的计算公式,螺旋桨附连水的质量、极转动惯量和径向转动惯量系数分别取1.1、1.25和1.5,得螺旋桨附水质量为120 353 kg,附水极转动惯量为454 250 kg·m2,附水径向转动惯量为 272 550 kg·m2。
2.2 模型建立与简化
(1)建模时为了尽可能模拟船舶推进轴系的状态,同时考虑螺旋桨的陀螺效应,选用beam188单元对轴段进行模拟,对于轴段上的联轴器,通过设置梁的截面来模拟。
(2)螺旋桨的桨毂部分,通过适当延长尾轴长度来模拟。螺旋桨及附连水的质量和转动惯量较大,采用mass21质量单元,施加在螺旋桨的几何中心位置。
(3)对于径向轴承,采用combine14弹簧单元进行模拟,在每个支撑位置的垂直和水平方向分别设置一个弹簧单元。弹簧的一端与轴系上的轴承对应节点相连,另一端设置为固定端。
(4)由于进行回旋振动分析,因此对弹簧单元的固定端施加全约束,对主机端的节点约束其全部自由度,约束轴系在UZ和ROTZ上的自由度[7]。
简化后的轴系模型如图1和图2所示。

图1 轴系有限元模型(显示单元) Fig.1 Finite element model of shafting (unit displayed)

图2 轴系有限元模型(显示约束)Fig.2 Finite element model of shafting(constraints displayed)
3 计算结果分析与讨论
径向轴承的支承刚度是轴系回旋振动的重要影响之一,它是由若干因素决定的,例如轴承结构、轴承材料、轴承间隙、油膜等,所以精确测量支承刚度是很困难的。
在船舶轴系实际运转中,滑动轴承垂直方向上的刚度要比水平方向上的刚度值大,轴的中心环绕着的旋转中心的轨迹是一个椭圆而不是一个圆形,因此在回旋振动时可能出现水平和垂直方向上两个临界转速[7]。但是其差距并不大,为研究后尾轴承水平方向刚度值单独变化对回旋振动影响,在本文中将两个方向上的刚度差距放大至一个数量级,以便观察其对轴系振动影响的变化规律。
由于篇幅有限,在本文以下的研究中,用刚度符号①代指后艉轴承刚度特性为水平刚度4.6×108/N·m-1,垂直刚度 4.6×108/N·m-1,用刚度符号②代指后艉轴承刚度为水平刚度 4.6×108/N·m-1,垂直刚度4.6×109/N·m-1,用刚度符号③代指后艉轴承刚度为水平刚度 4.6×109/N·m-1,垂直刚度 4.6×109/N·m-1。其他轴承各方向上的刚度为定值,均保持水平刚度4.6×109/N·m-1,垂直刚度4.6×109/N·m-1。
3.1 固有频率计算
由于引入了螺旋桨的陀螺效应,采用QR阻尼法,所得的特征值为复数,其虚部为进动(回旋)频率,实部为衰减系数,且特征值成对出现,对应正回旋和逆回旋的固有频率。按照上面的代指规则,依次改变后艉轴承刚度,分别在计入陀螺效应和不计入陀螺效应这两种情况下进行模态分析,得到其前三阶正逆回旋固有频率,如表1和表2所示。

表1不计陀螺效应时正逆回旋固有频率Tab.1 Natural frequency of forward and inverse whirling vibration without considering the gyroscopic effect

表2计入陀螺效应时正逆回旋固有频率Tab.2 Natural frequency of forward and inverse whirling vibration considering the gyroscopic effect

得到不同刚度下各阶回旋振动在计入(不计入)螺旋桨陀螺效应时的相对变化量,如表3所示。
对数据进行处理,采用以下公式:

表3相对变化量Tab.3 The relative change amount
由表1-3可知,不计入陀螺效应时,回旋振动便退化为横向振动。当后尾轴承垂直方向的刚度与水平方向刚度相同时,轴系会出现两个成对(共轭方向)的回旋振动固有频率,其值大小相同;当后尾轴承垂直方向的刚度与水平方向刚度不相同时,例如保持垂直方向刚度不变,当水平方向的刚度单独降低,则水平方向上对应的回旋振动固有频率降低,即相应临界转速降低,而垂直方向上的回旋振动固有频率不变化。这说明,不计陀螺效应时,轴承某一方向上的刚度变化只会影响到该方向上横向振动固有频率(临界转速),而不会影响其他方向。
计入螺旋桨陀螺效应时,相较于不计入螺旋桨陀螺效应(横向振动)而言,当水平方向刚度降低时,逆回旋固有频率会在水平横向振动固有频率的基础上进一步降低;正回旋各阶固有频率会略微提高,但是其相对变化量与逆回旋各阶固有频率的相对变化量大小相近。这说明螺旋桨的陀螺力矩在正回旋(正进动)时提高了临界转速,在逆回旋(反进动)时降低了临界转速,且其对正逆回旋的影响相当。
比较上面后艉轴承刚度各向同性与各向异性两种情况,发现当后艉轴承刚度各向异性时,计入陀螺效应与不计入陀螺效应的相对变化量很小,即此时螺旋桨的陀螺效应远远没有各向同性时显著。再分析公式(2)和公式(3),推断这可能是由以下两个因素造成的:
(1)根据公式(2),支承各向同性时陀螺效应包含科氏力矩(由自转角速度决定)和惯性力矩JdΩωθ(由公转角速度和自转角速度决定)。ANSYS中陀螺效应是建立在高速轴的基础上,即假定转子自转角速度远远大于公转角速度,因此其陀螺力矩主要是由转子自转角速度决定的。而本文中研究对象为大型低速集装箱船,其轴系转速较低,而公转角速度有可能与自转角速度处于同一数量级,甚至更大,因此其牵连惯性力矩在陀螺效应中所作贡献不可以忽略。根据可以判断ANSYS在轴承各向同性时所计算的陀螺效应要比实际的陀螺效应大。
(2)根据公式(3),当轴承刚度各向异性时,其相互垂直两个方向的陀螺力矩主要取决于轴系自转角速度 ω、转角速度和转角加速度而本文中轴系自转角速度很低,因此陀螺效应影响不大。
3.2 坎贝尔图计算
通常在船舶轴系回旋振动计算中,由于伴流场的激励特性,一般只需要求出轴频、叶频和倍叶频的正逆回旋振动临界转速就可以了[8]。改变轴系的自转角速度,分别画出刚度①、刚度②和刚度③的坎贝尔图,如图3-5所示。

图3刚度①的坎贝尔图 Fig.3 Campbell diagram of stiffness①
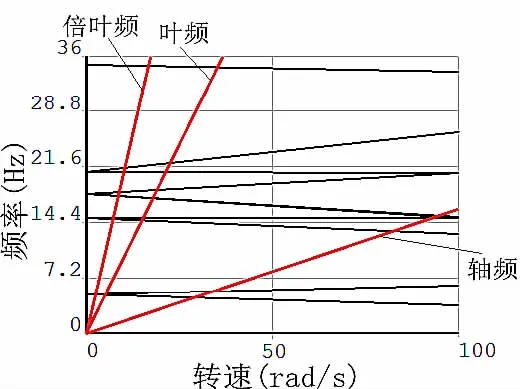
图4刚度②的坎贝尔图Fig.4 Campbell diagram of stiffness②
由图3-5可知,随着转速的提高,在陀螺效应的作用下,轴系各阶正回旋临界转速逐渐提高,逆回旋临界转速逐渐降低,这与理论相符。
当后艉轴承刚度由水平刚度4.6×109/N·m-1,垂直刚度4.6×109/N·m-1变化为水平刚度 4.6×108/N·m-1,垂直刚度 4.6×108/N·m-1时,其正逆回旋各阶临界转速均降低,但是此时其正逆回旋线仍在零转速(横向振动)处重合;当后艉轴承刚度由水平刚度4.6×109/N·m-1,垂直刚度 4.6×109/N·m-1变化为水平刚度 4.6×108/N·m-1,垂直刚度 4.6×109/N·m-1(即水平方向刚度单独变化),其逆回旋线降低,而正回旋线变化不大,此时其正逆回旋临界转速线在零转速(横向振动)处不重合。

图5刚度③的坎贝尔图Fig.5 Campbell diagram of stiffness③
3.3 临界转速计算
由于该船轴系的额定转速为104 r/min,即10.888 5 rad/s,在轴系启动到额定转速这段范围内,有可能出现叶频和倍叶频的临界转速,通过坎贝尔图计算得到其前三阶正逆回旋的轴频、叶频和倍叶频的临界转速,如表4所示。
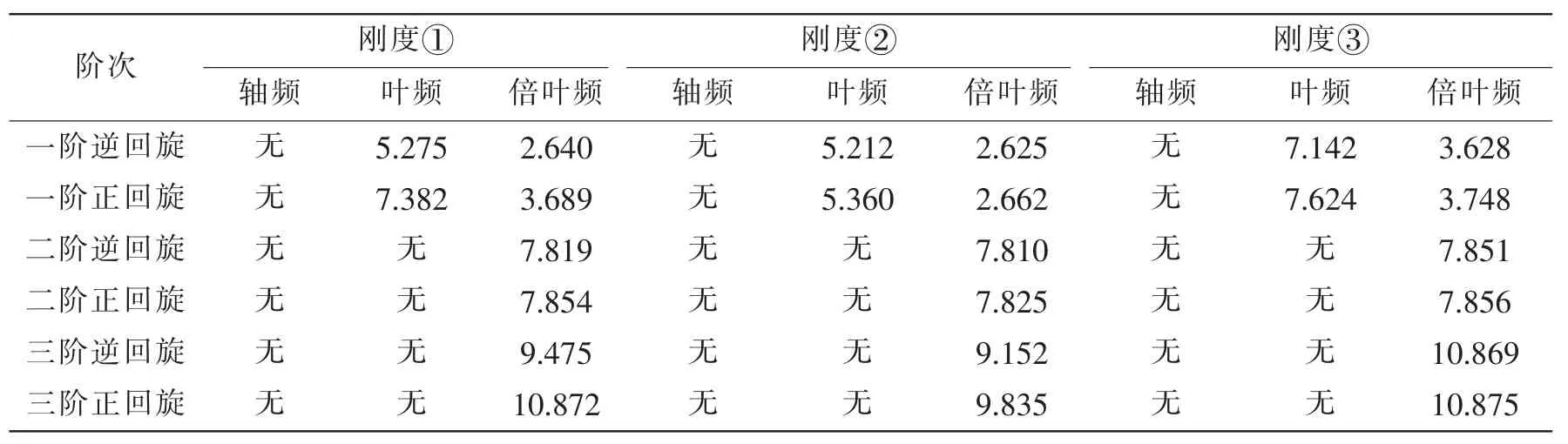
表4 前三阶正逆回旋临界转速(rad/s)Tab.4 Critical speed of first three forward and inverse whirling vibration(rad/s)
由表4可知,上面三种刚度下,在该船额定转速范围内,均不会经过轴频所对应的临界转速,但是会经过叶频和倍叶频所对应的临界转速。不管是叶频还是倍叶频,当轴承水平方向上的刚度单独从K1降低到K2时,逆回旋的临界转速也随之降低,介于K1和K2对应的临界转速ω1和ω2之间,接近ω2;正回旋的临界转速略微降低,也是介于K1和K2对应的临界转速ω1和ω2之间,接近ω1。
3.4 振动响应评估
螺旋桨在船尾不均匀伴流场中运转时,螺旋桨受水动力以叶频为基频的激振力和激振力矩作用,通过轴承传递给船体,这是轴系振动的主要原因。在该节中,采用的正弦激振力为8.45 kN,横向施加在螺旋桨对应的节点上。
通过上一节的分析发现,这三种刚度下的轴系一阶固有频率均在10 Hz以下,选定强迫振动的频率范围为0~10 Hz,仍然选取与上节相同的三种刚度,进行谐响应分析。选取螺旋桨、后尾轴承、前尾轴承这几个具有代表性的位置,分析其受力方向的最大振动响应位移,其结果如表5所示,幅频曲线如图6-8所示。

表5轴系各关键位置最大位移(mm)Tab.5 Maximum displacement of the key positions(mm)
从表5和图6-8可以看出,在一定轴承刚度下,轴系的振动响应位移大致从螺旋桨至推力轴承呈递减趋势,即螺旋桨处振动位移响应最大。一般情况下,轴承某方向上的刚度越大,则该方向的振动响应位移越小。
轴承刚度各向异性时,例如当轴承水平方向上的刚度从K1降低到K2时,在水平方向的激励下,该方向上的最大响应位移ζ也随之增大;而在其相互垂直的方向上产生的位移相对来说较小,可忽略不计。当在垂直方向施加同样的激励时,垂直方向上最大位移响应略小于K1对应的最大位移响应ζ1,这需要进一步探讨。
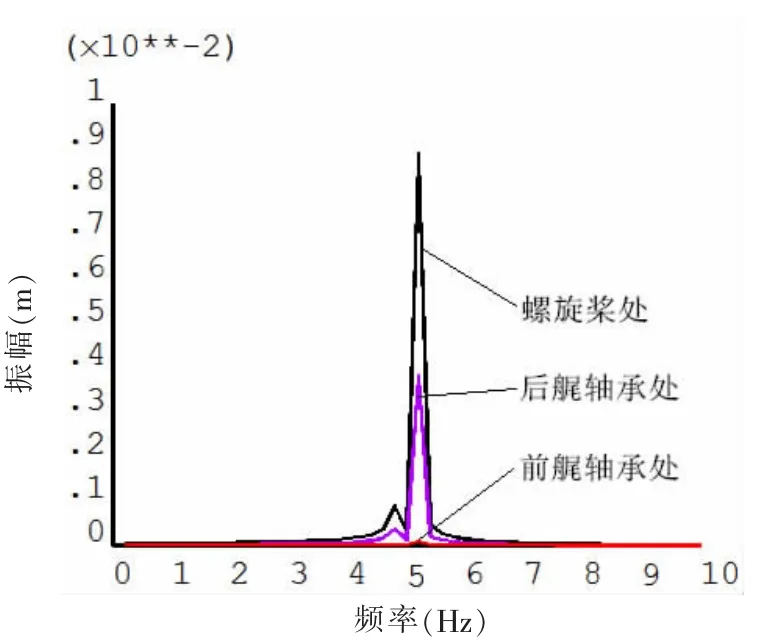
图6刚度①的幅频曲线Fig.6 The Amplitude-Frequency curve of stiffness①

图7刚度②的幅频曲线Fig.7 The Amplitude-Frequency curve of stiffness②

图8刚度③的幅频曲线Fig.8 The Amplitude-Frequency curve of stiffness③
4 结 论
本文以转子动力学为基础,分析了公式法与ANSYS有限元法在计算陀螺效应时的异同,建立了某船舶推进轴系的有限元模型,并在后艉轴承刚度各向同性和各向异性的情况下,分析了其在额定转速下的回旋振动固有频率,得到轴频、叶频和倍叶频的临界转速,以及对振动响应做出了分析与评估。其结论如下:
(1)不计陀螺效应时,轴承某一方向上的刚度变化只会影响到该方向上横向振动固有频率(临界转速),而不会影响其他方向。计入陀螺效应时,螺旋桨的陀螺力矩在正回旋(正进动)时提高了临界转速,在逆回旋(反进动)时降低了临界转速,且其对正逆回旋的影响相当。有限元软件ANSYS在后艉轴承各向同性时计算陀螺效应与实际有一定偏差。
(2)随着转速的提高,在陀螺效应的作用下,轴系各阶正回旋临界转速逐渐提高,逆回旋临界转速逐渐降低。在坎贝尔图中,后艉轴承刚度各向同性时,其正逆回旋曲线在零转速(横向振动)处重合;后艉轴承刚度各向异性时,其正逆回旋曲线在零转速(横向振动)处不重合。
(3)在一定轴承刚度下,轴系的振动响应位移大致从螺旋桨至推力轴承呈递减趋势。一般情况下,轴承某方向上的刚度越大,则该方向的振动响应位移越小。
