机器人在车辆制动试验中的应用
2019-07-23吕吉彻王宝军
吕吉彻,王宝军,卞 防
(中国第一汽车集团有限公司研发总院,吉林 长春 130011)
现在汽车已经成为人们生活中的重要交通工具,随着汽车数量的不断增加[1],人们对汽车智能化的要求也不断提高。随着自动试验技术的不断发展,全球主要汽车公司积极布局相关领域,通过项目资助、联合研发、推广示范等多种手段推动自动试验技术的应用与发展[2]。在以往的汽车试验中,试验员需做各种重复多次的试验操作,试验员易疲劳,工作环境又较为恶劣。采用机器人进行各种试验不仅可以降低试验员的劳动强度,减少试验成本,提高试验效率,而且能消除人为因素的影响,保证试验数据的准确度和重复性[3-4]。利用试验机器人替代人类试验员进行汽车试验已成为汽车研发的趋势。
本文通过对试验车辆不加装制动试验机器人和加装制动试验机器人分别进行制动踏板力测试。通过试验数据处理,分别得出两种工况下的制动力-时间曲线图,通过比较,可以看出使用制动试验机器人后的数据准确度和重复性都有很大提高,接近理论值。
1 试验设备及气象
1.1 设备原理
汽车制动试验机器人需要真实复原试验员的试验操作。它是集机械设计、控制算法、硬件电路、软件开发为一体的系统,如图1所示。
制动机器人的机械构造包括可以和各种尺寸座椅配合的安装支架,其工作电机可提供最大1 400 N的制动力,最大300 mm/s的制动速度,最大130 mm的踏板行程。取用车载12~20 V电源,经DC-DC输出70 V供数据采集器用,如图2所示。
控制系统是自动驾驶机器人的核心,它在人为控制指令下根据车辆状态和环境感知信息,通过决策将控制指令发送给执行机构,实现车辆的速度控制和制动踏板控制[5-6]。除此之外,它们也可以用于其他的测试应用,如耐久性及高级驾驶辅助系统 (ADAS)的开发[7],原理如图3所示。

图1 制动机器人安装支架和电机

图2 DC-DC
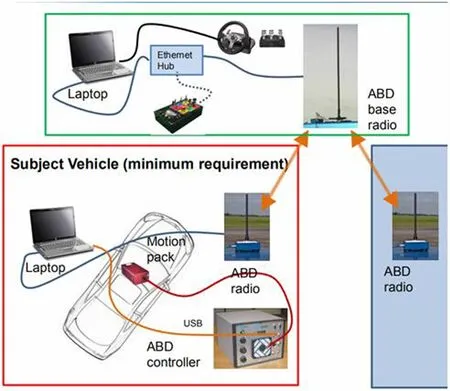
图3 制动试验机器人连接
1.2 气象条件
试验应在大气温度为0~40℃时进行,不应有雾、雨或雹,风速不大于3 m/s。大气压力不低于91 kPa,相对湿度不大于95%。
实际气象条件:温度21℃,湿度53.6%,风速0.6 m/s,气压100.3 kPa。
2 试验结果计算分析
本公司某车型的试验总质量为1 484 kg,4×2前轮驱动,轮胎型号为205/55 R16 91 V。按照GB/T 12534-1990《汽车道路试验方法通则》[8]和GB 12676-1999《汽车制动系统结构、性能和试验方法》[9]规定,在一汽农安汽车试验场直线性能路进行数据采样。
向制动踏板施加一个400N的阶跃力,使车辆从120 km/h减速到0。在开始阶跃之后的制动期间,力需要控制在300~500 N,理论制动力-时间曲线图如图4所示。
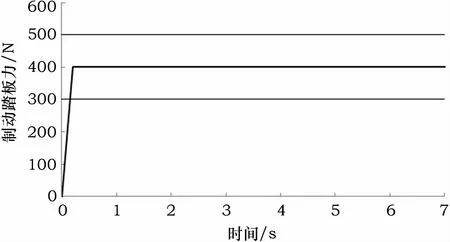
图4 理论制动力-时间曲线图
当试验员以400 N的制动力进行制动时,剧烈的制动减速度 (减速度高达1 g)使试验驾驶员很难将制动踏板力控制在300~500 N。在连续26次测试中,试验员只有4次取得了成功,其它的22次测试制动踏板力都在测试极限之外,如图5所示。
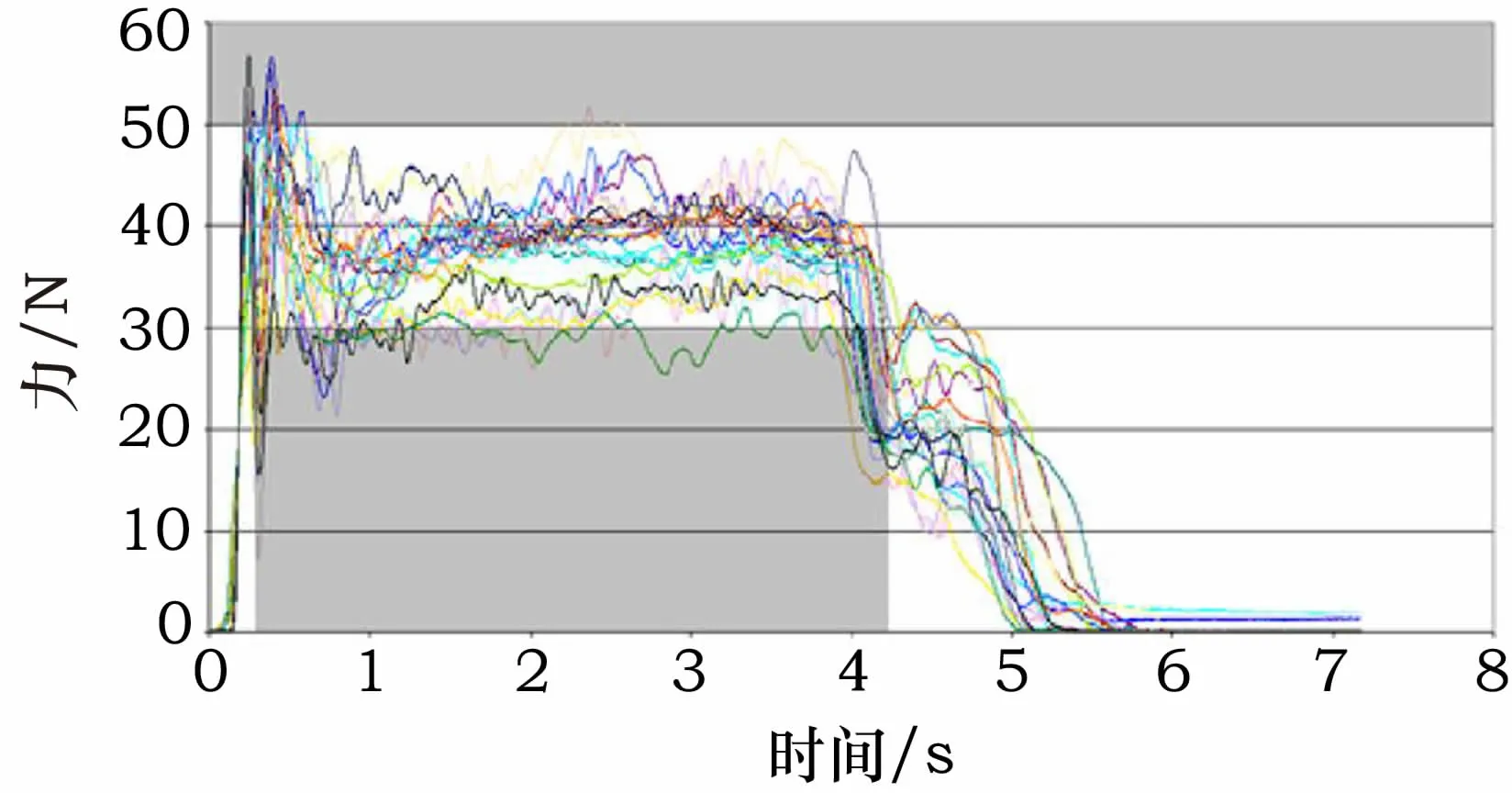
图5 试验员控制的制动力-时间曲线图
将制动踏板机器人安装在试验车辆上。由机器人控制制动踏板输入进行了5次试验,如图6所示。所有的5次试验均成功了。施加的力在需要的阶段内不仅维持在300~500 N,它仅偏离理想的400 N的力最多30 N。它能使试验允许定义的误差带更窄,从而提高试验结果的准确度和重复性。
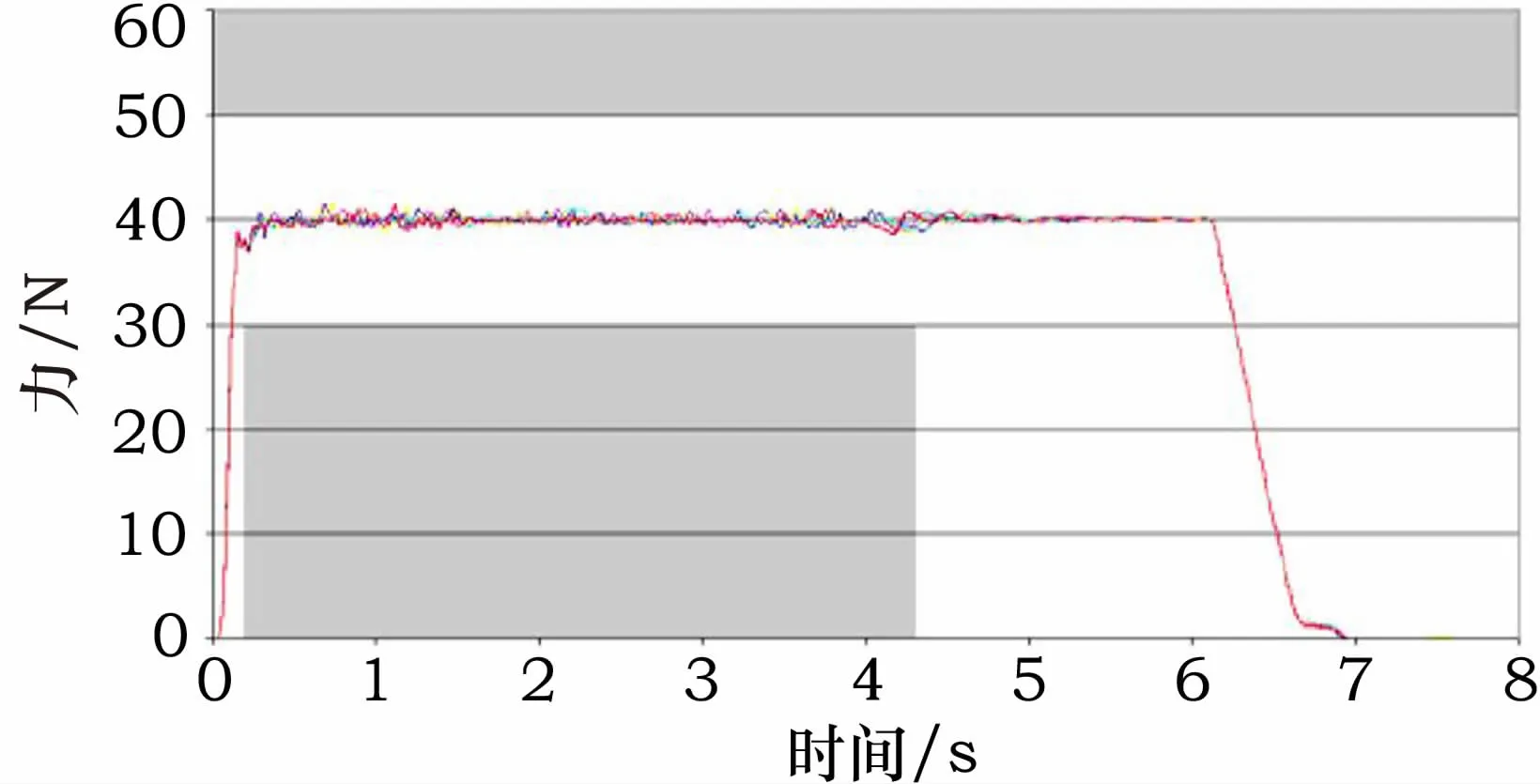
图6 机器人控制的制动力-时间曲线图
可以看出,使用制动机器人进行制动试验的优点非常明显。消除人为因素的影响提高了试验数据的准确度和重复性,不需要试验员踩踏板降低了试验员的劳动强度,缩短试验时间减少了试验成本,提高了试验效率。同理,结合GPS进行车速-制动力试验,车速-制动减速度试验,车速-制动行程试验,结合GPS和CANoe进行车速-油门踏板开度动力性试验都可以达到一样的效果。
3 结论
用机器人做出的试验数据准确度和重复性都有了很大提高,精度达到研发要求。本文为提高汽车试验自动化水平、缩短试验时间、降低试验成本、提高试验精度提供了一种切实有效的方法。也为以后远程控制下的无人试验提供了重要的依据和参考。随着导航技术和通信技术不断发展,驾驶机器人将会在汽车试验行业及自动驾驶行业有很好的前景,对推动车辆智能化的发展特别是自动驾驶应用具有重要意义。
(编辑 杨 景)
