基于视频暗箱仿真测试系统在MCS测试中的应用
2019-07-23孙运玺张国芳潘守亮谷原野
孙运玺,安 鹏,张国芳,崔 岩,潘守亮,谷原野
(一汽轿车股份有限公司,吉林 长春 130000)
美国汽车工程师学会SAE在2014年发布的J3016标准将汽车自动驾驶等级进行了定义,将驾驶从手动驾驶到完全自动驾驶分成了L0~L5共6个等级,如图1所示,其中L0表示没有任何自动驾驶手动,L1-L4为驾驶辅助阶段,L5为完全自动驾驶阶段,整个驾驶过程无需驾驶员参与。目前国内的主机厂在研及量产的车型均处于L1或L2阶段,一般包括预警提示类的ADAS功能,如车道偏离 (LDW),前撞预警(FCW),盲点检测 (BSD),以及干预辅助类的ADAS功能,如自适应巡航 (ACC),紧急自动制动 (AEB),车道保持辅助 (LKA)等。随着传感器技术[1]、数据融合技术、车联网以及道路基础设施的不断更新迭代,自动驾驶的目标将会在不远的将来实现,而且国内外的各大主机厂均已经有了自己的时间表。
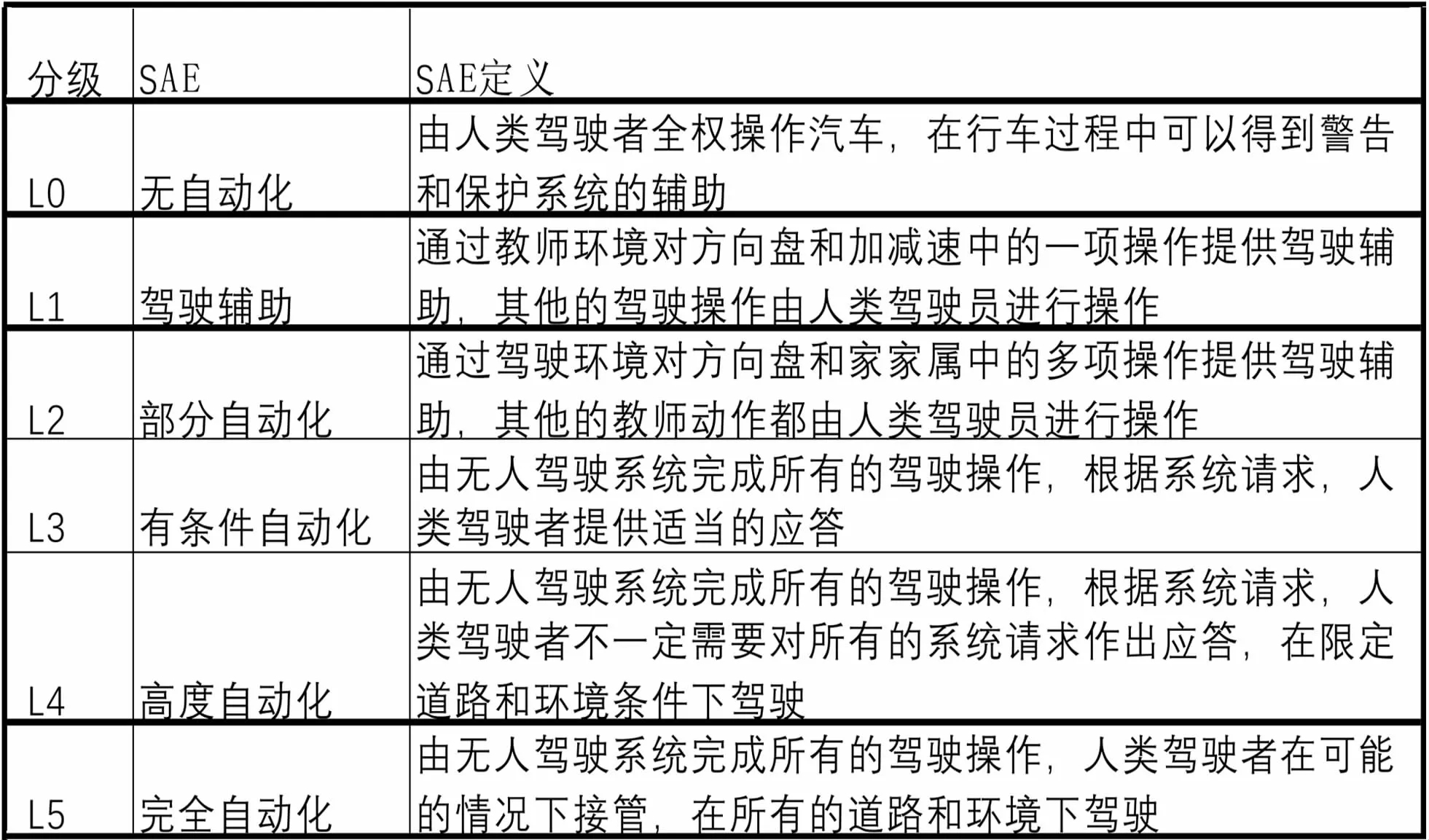
图1 SAE自动驾驶等级划分
本文针对模块车型搭载的L1级的高级驾驶辅助系统-多功能前视摄像头的测试方案和手段进行了深入研究,该系统主要通过视频信号的采集与处理实现自适应巡航 (ACC)、前碰撞预警 (FCW)、自动制动 (AEB)等功能[2],多功能前视摄像头系统的控制算法较为复杂,需要采集实际道路工况的视频数据信息,识别障碍物 (人、车、路线)、距离、车速信息,并与EMS、ESP、IC等控制器协同控制实现控制操作,研发过程中控制器的程序存在控制策略错误的可能性,直接在搭载实车测试验证存在风险,因此实验室的仿真测试的测试场景的开发、测试用例覆盖度、极限工况的模拟具有重要的意义,经过实验室仿真测试的测试验证后,可有效降低实车测试的风险。控制器的输入信号为实际路况的视频类信息,传统的IO模拟的自动化测试系统已经无法满足测试需求,本文重点介绍基于视频暗箱的视频信息仿真系统解决方案。
1 多功能前视摄像头系统
本文中所述的多功能前视摄像头系统由控制器、摄像头 (采用EYEQ3)构成,通过摄像头采集实际的道路工况,包括人、车、路等物体的识别,根据主动安全控制策略,与EMS、ESP、IC等控制器实现ACC、FCW、AEB等功能[3],如图2所示。
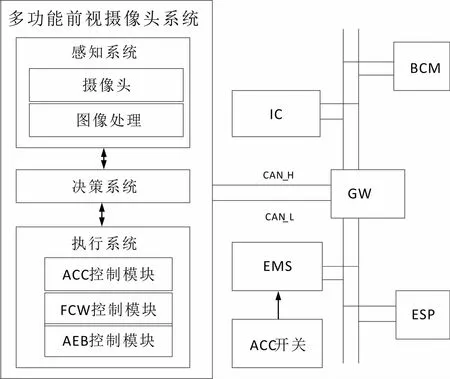
图2 多功能前视摄像头系统构成
ACC功能系统探测到前方有车辆时,根据驾驶员设定的车速和跟车距离等级,对本车车速实施自适应控制。FCW功能可对前向碰撞危险向驾驶员提供视觉、声觉或触觉的警报,FCW一般分为预碰撞警示和碰撞警示2个警示级别,其中预碰撞用于提醒驾驶员有潜在的碰撞危险,请提高警戒小心驾驶。碰撞警示用于提醒驾驶员碰撞即将发生,驾驶员必须立即采取措施。AEB功能可针对前向的碰撞危险主动介入本车制动,从而避免碰撞发生或缓解碰撞程度,AEB功能可响应前方的目标车辆、行人、骑行者等。
2 自动化测试应用
2.1 自动化系统搭建
实验室仿真测试系统主要由实时仿真平台、试验管理计算机、图形工作站与视频暗箱构成,其中实时仿真计算机是系统的核心,能够运行车辆动力学模型和交通场景模型。试验管理计算机用于实现模型的编译下载、在线监控、在线调参和数据后处理。图形工作站提供了三维虚拟仿真环境,并提供传感器的仿真环境。视频暗箱主要提供了视频采集环境,能够为真实控制器摄像头显示道路交通场景信息 (道路场景信息既可以是虚拟场景,也可以为实际道路场景信息),结构包括一个暗箱箱体、视镜显示器、多自由度调节的控制器摄像头固定支架、透镜、可调节的导轨以及开关电源等构成[4]。自动化系统搭建示意图见图3。
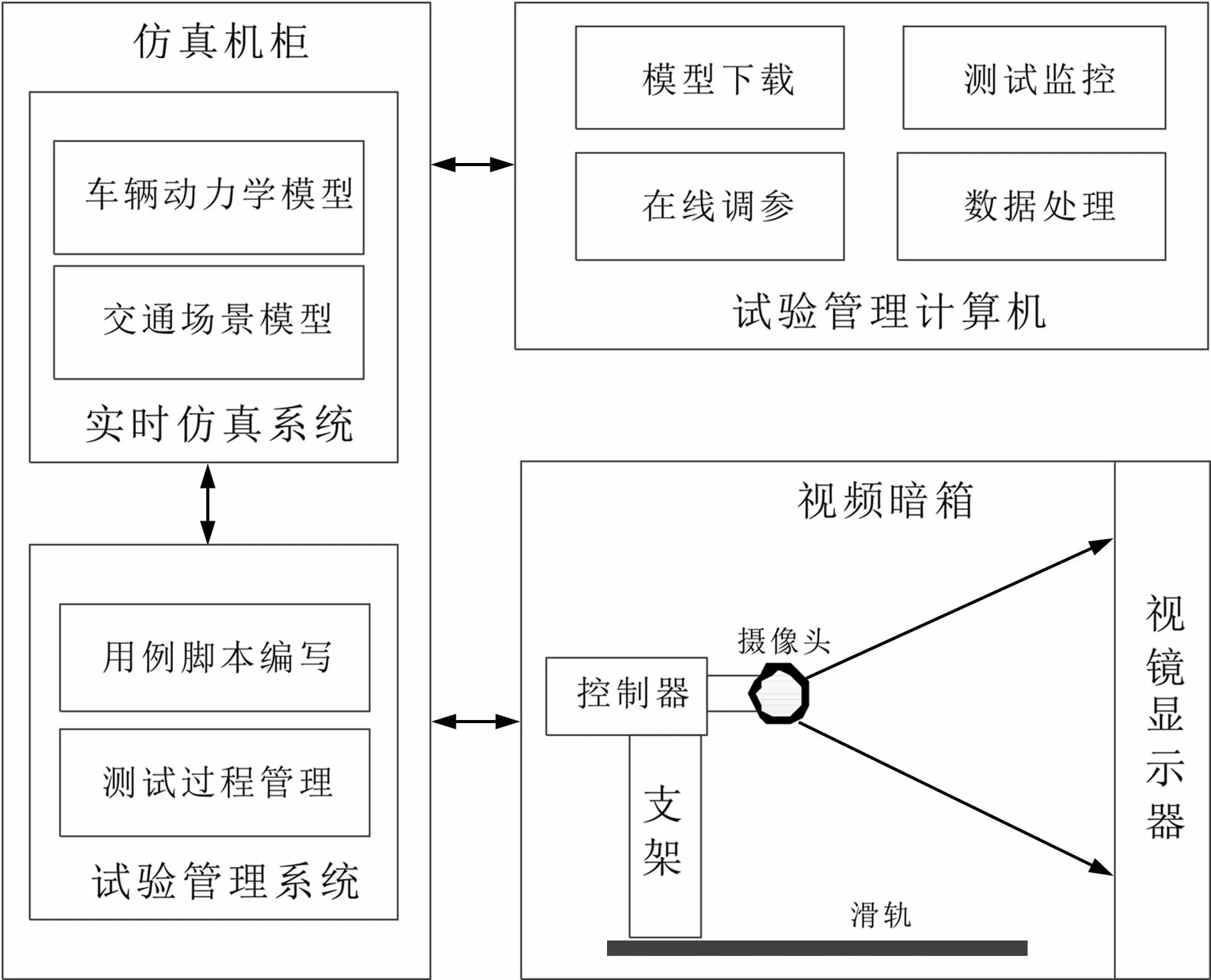
图3 自动化系统搭建示意图
2.2 自动化测试执行
实验室仿真测试主要在于各种测试场景的开发,除了常规功能逻辑的测试验证之外,故障注入等极限工况的测试尤为重要,此类测试用例的比重约占测试用例总数的60%以上,下面举例说明仿真测试的执行过程。
2.2.1 测试用例一:ACC自适应跟车测试
2.2.1.1 测试工况
本车定速70 km/h,目标车车速50 km/h,左侧车道有车速55 km/h的干扰车辆 (ACC跟车过程中车速下降到30 km/h),跟车控制测试。
2.2.1.2 测试过程
1)本车首先设置以70 km/h定速巡航。
2)2个目标车,本车前方目标车速度50 km/h,本车左侧相邻车道目标车速度55 km/h,相邻车道的车辆在本车跟车过程中会减速到30 km/h。
3)本车定速行驶,直到检测到目标车会进入跟车模式。
2.2.1.3 测试结果
1)本车能够跟车行驶。
2)本车跟车过程中未受相邻车道车辆影响。
信号显示及人机界面显示如图4、图5所示。
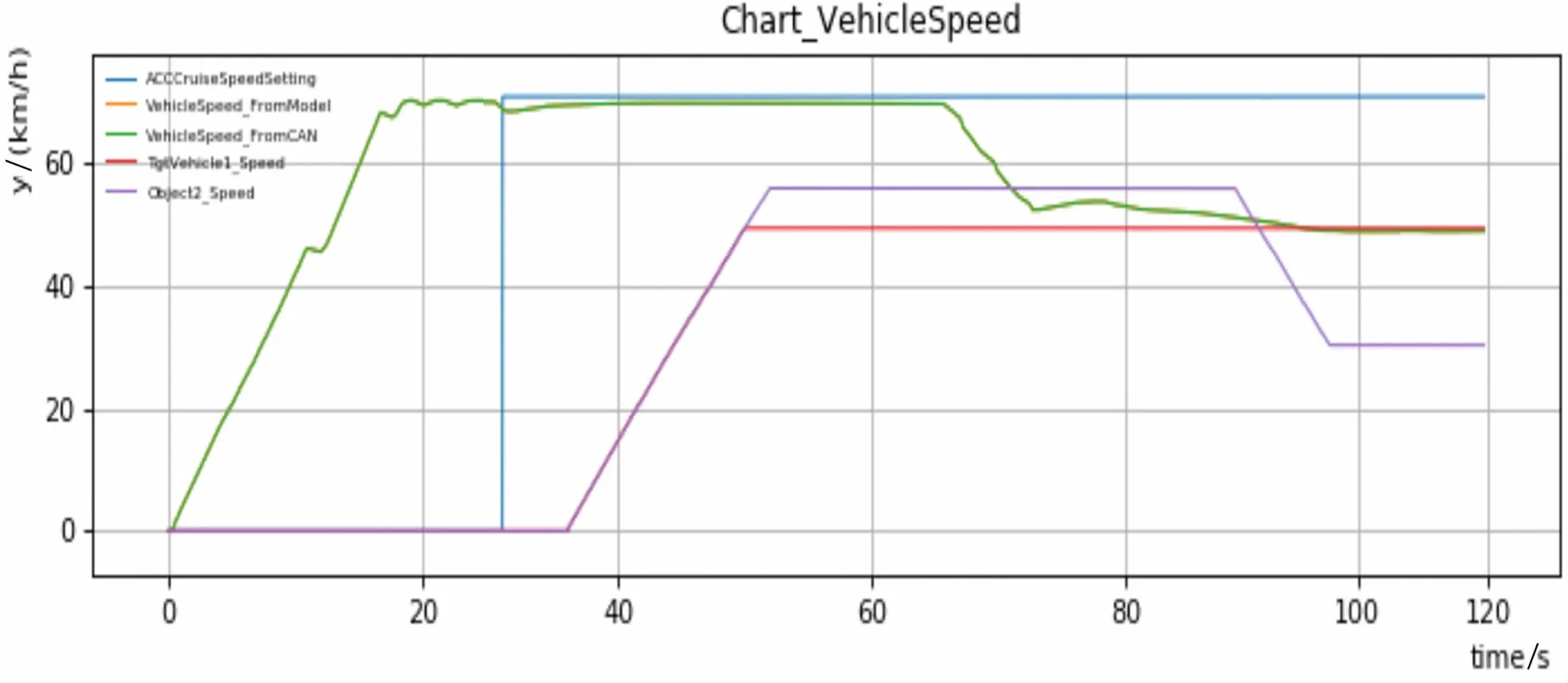
图4 ACC自适应跟车测试信号显示
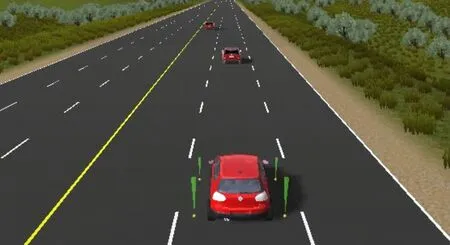
图5 ACC自适应跟车测试界面显示
2.2.2 测试用例二:ACC自适应跟车--ESP故障
2.2.2.1 测试工况
本车定速70 km/h,目标车车速50 km/h,跟车控制过程中ESP异常 (ESP系统状态Error),查看ACC系统状态。
2.2.2.2 测试过程
1)本车首先设置以70 km/h定速巡航。
2)本车前方目标车速度50 km/h匀速行驶。
3)本车定速行驶,直到检测到目标车进入跟车模式,跟车一段时间后设置ErrorSt_ESP=1。
2.2.2.3 测试结果
1)本车退出ACC巡航功能。
2)系统给出提示信息。
信号显示及人机界面显示如图6、图7所示。
3 结论
本文详细阐述了多功能前视摄像头系统的工作原理,并介绍了基于视频暗箱测试的仿真方案,对ACC、AEB、FCW、LDW等功能在场地及道路测试无法覆盖各种故障、危险和极限工况进行了充分验证,有效规避了实车测试的风险,保证了主动安全系统功能的可靠性和稳定性。随着自动驾驶的功能的不断迭代升级,实验室仿真测试将是更为重要的一环,测试的方法和手段将会不断丰富和扩展,实验室测试系统将会越来越复杂,并且会由单个仿真系统逐步向整车在环仿真系统发展,大型仿真实验室的建设将是各大主机厂投入的重点方向。
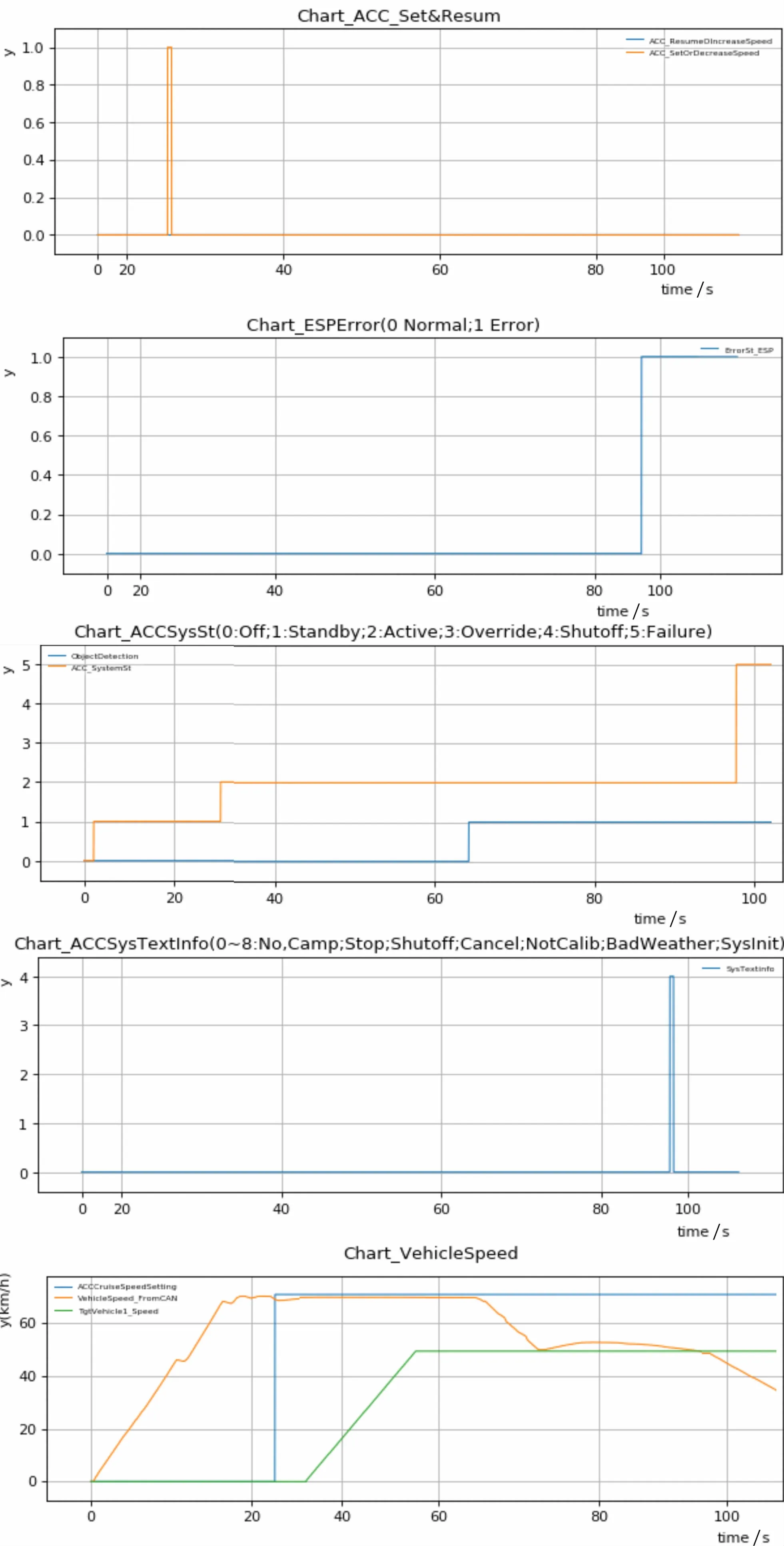
图6 ACC自适应跟车时ESP故障信号显示

图7 ACC自适应跟车时ESP故障界面显示