履带式全方位移动平台的运动学分析与仿真*
2019-07-20张豫南杨怀彬史浩楠
张豫南,房 远,杨怀彬,崔 智,史浩楠
(陆军装甲兵学院,北京 100072)
0 引言
全方位移动平台能够实现前后平移、左右平移和绕自身旋转3个自由度的运动,这种运动学上的优势使其在狭窄空间作业的机器人运动系统得到广泛应用,并成为机器人移动机构的一个主要发展趋势[1]。全方位移动平台种类多样,其中以Mecanum轮式移动平台的研究和应用最为成熟[2]。Mecanum轮式移动平台采用与普通轿车相似的布局形式,可扩展性强,与其他全方位移动平台相比具有较强的承载能力,而且平台的相关控制技术成熟,故得到了较为广泛的应用,例如物流仓储中使用的Mecanum轮式叉车。由于Mecanum轮自身的结构特点,使得辊子轴向受力大、易磨损,且在轮子正常运动时辊子一般伴随有滑动[3],无法准确完成直线运动。Mecanum轮式移动平台在运动过程中振动大,越野、越障能力差,在地面湿滑的情况下,运动能力差。
为了改善Mecanum轮式移动平台的运动能力,一种思路是直接对Mecanum轮进行改进,包括设计椭圆形的 Mecanum 轮[4],增加辊子锁紧机构[5],对辊子厚度补偿[6]等,增加了轮的复杂程度,其加工成本和难度也较高,实际效果不好。另一种思路是受Mecanum轮式移动平台的启发,设计出履带式全方位移动平台,矩形布局的履带式全方位移动平台如图1所示,其行走机构的细节部分如图2所示。履带式全方位移动平台的实用性强,应用领域广泛,既能实现全方位运动,又具有传统履带式移动平台的优点,如:运动平稳;接地面加大,载重能力强;越野能力强;具有一定的柔性,对不平路面具有一定的“滤波”作用等[7]。

图1 矩形布局的履带式全方位移动平台
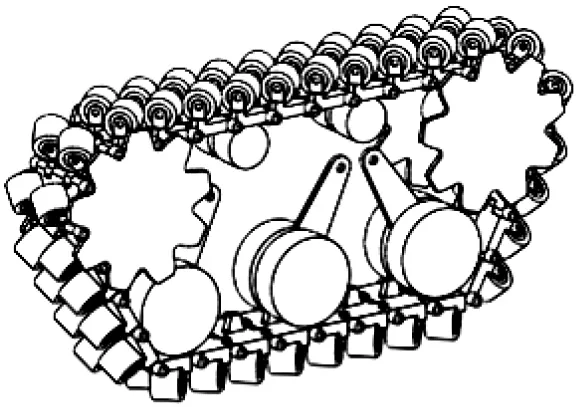
图2 履带式全方位移动平台行走机构
目前针对履带式全方位移动平台的研究很少,现有文献中的运动学方程和动力学方程的推导过程复杂,推导结果的通用性不强,并且只对矩形布局的履带式全方位移动平台进行了验证,限制了对履带式移动平台运动特性的进一步研究。本文针对履带式移动平台的运动学方程,提出一种较为简便的推导方法,并以三角形布局的履带式移动平台为例,对运动学方程进行仿真验证。
1 运动学方程
本文在运动学方程推导的过程中进行了简化,并不直接针对履带式全方位移动平台进行推导,而是针对在运动学方程上等效的圆柱辊子Mecanum轮全方位移动平台(以下简称“圆柱辊子全方位移动平台”)进行推导,圆柱辊子全方位轮和圆柱辊子全方位移动平台如图3、图4和图6所示。对比可知,履带式全方位移动平台和圆柱辊子全方位移动平台的区别在于是否有履带和圆柱辊子(履带上是圆柱小轮)数量的多少,如果假设履带式全方位移动平台的履带接地段的滑转、滑移为零,圆柱辊子全方位移动平台的辊子不发生滑移,那么二者的运动学方程将是完全相同的。
1.1 圆柱辊子全方位移动平台运动学建模
在本文中对全方位移动平台的运动过程作出如下假设:
1)平台车体、全方位轮和地面均为刚体,平台在理想的平面上运动;
2)辊子与地面之间具有足够大的摩擦力,辊子不发生滑移;
3)平台的重心在其平面几何中心上;
4)假定辊子与地面的接触点在全方位轮正下方,忽略圆柱辊子全方位轮转动过程中辊子与地面接触点的变化。
采用矢量分析法,圆柱辊子全方位移动平台的运动学方程推导过程如图3所示:

图3 触地圆柱辊子示意图

图4 轮相对平台质心示意图
对于由n个圆柱辊子全方位轮构成的移动平台,首先讨论第i个圆柱辊子全方位轮的速度表达式,图3所示为基于圆柱辊子全方位轮坐标系内各量的定义,图4所示为基于圆柱辊子全方位移动平台坐标系内各量的定义。定义轮毂转过的角度为θi,轮毂转速为θ觶i,圆柱辊子转过的角度为,圆柱辊子的转速为,点Qi为圆柱辊子的中心点,点Oi为轮毂的中心点,点Oi的速度向量为o觶i,全方位轮和地面的接触线为圆柱辊子上的线li,过点Oi和Qi的直线和 li相交于点 Ai,点 Ai的速度向量为a觶i。定义 ω 为平台车体转动角速度,定义点B为平台几何中心,b觶为平台的速度向量,定义di为从B点指向Oi点的向量,ei为沿轮毂轴线方向的单位向量,ki为沿OiQi方向的单位向量,fi为过点Oi且垂直于ei和ki的单位向量,mi为沿圆柱辊子轴线方向的单位向量,ni为过点Oi且垂直于mi和ki的单位向量,R为全方位轮半径,r为圆柱棍子半径。
将Oi点的速度与Ai点的速度联系起来,有

其中,vi为Oi相对于Qi的速度。
记ωR为轮毂角速度,ωr为辊子角速度,则有

从线速度的角度有
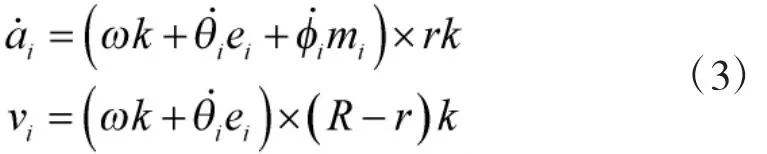
也即有

将式(4)代入式(1)得

下面讨论Oi相对于B点的速度表达式,如图4所示,有

据图4中矢量之间的关系有

将式(5)两边同时点乘 mi,并将式(7)代入可得,

将式(6)两边同时点乘 gi,可得

联立式(8)和式(9),可得θ觶i和 ω 与b觶的关系为

考虑n个圆柱辊子全方位轮的运动方程,则平台的逆运动学方程为

相应的,平台的正向运动学方程为

平台能实现全方位运动的必要条件是系统的速度逆雅可比矩阵满秩,即rank(K)=3,此时系统不存在奇异位形。
1.2 矩形布局的履带式全方位移动平台运动学方程
应用式(11)和式(12),对如下页图 5所示的矩形布局的履带式全方位移动平台进行运动学分析,图中履带上的小辊子用直线段代替。根据1.1的内容,首先将矩形布局的履带式全方位移动平台等效成矩形布局的圆柱辊子全方位移动平台,对其进行运动学分析,如图6所示。图5和图6均为俯视图。图6中表示平台的广义速度,表示4个轮子的转速,方向符合右手定则,L和l分别表示前后轮之间距离的一半和左右轮之间距离的一半,圆柱辊子与轮轴的夹角分别取45°和-45°。根据式(11)和式(12)可以得到圆柱辊子全方位移动平台的正向运动学方程为
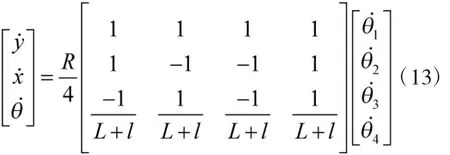
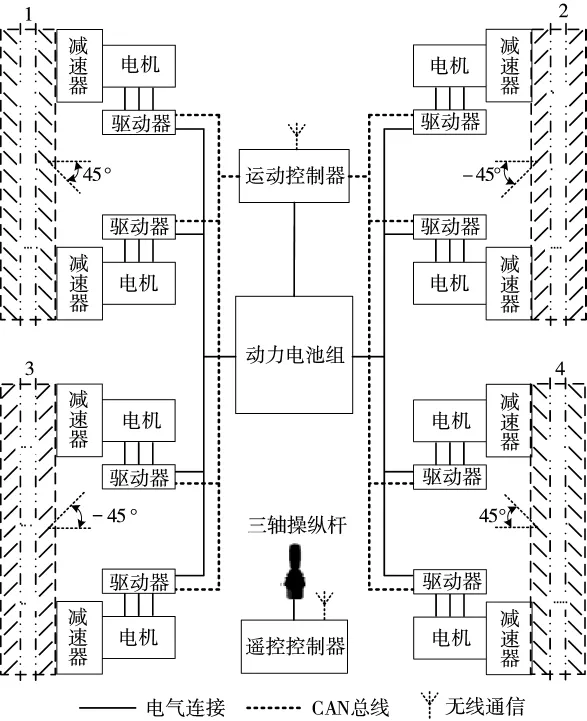
图5 矩形布局的履带式全方位移动平台结构图
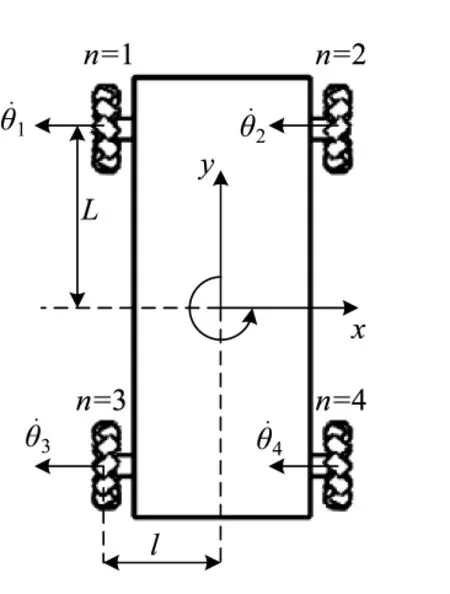
图6 矩形布局的圆柱辊子全方位移动平台
逆向运动学方程为

由前文1.1的分析可知,经过等效分析得到的式(13)即为履带式全方位移动平台的正向运动学方程,式(14)即为履带式全方位移动平台的逆向运动学方程。此结论与文献[7-8]的分析结果一致,并且已经过图1和图5所示的履带式全方位移动平台进行过实车验证,故可知本文运动学分析方法的正确性。
2 分析与仿真
在1.1节运动学方程的推导过程中,将全方位履带等效成圆柱辊子全方位轮处理,本质上是作出假设,认为履带式全方位移动平台的运动学特性和履带长度无关。为了证明该等效处理的正确性,同时验证本文公式结论的正确性,在Adams中建立车体相同,履带长度不同的履带式三角形全方位移动平台模型,进行中心转向仿真验证。三角形车体为等边三角形,三条履带呈中心对称分布。
2.1 履带式三角形车体全方位移动平台运动学建模
对履带式三角形车体全方位移动平台进行运动学分析,如图7所示。
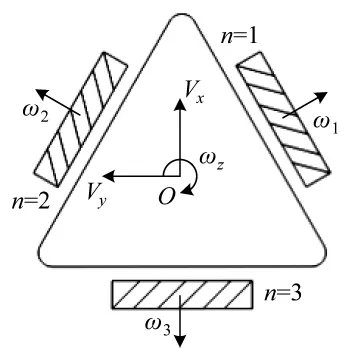
图7 履带式三角形车体全方位移动平台结构示意图
图7 为俯视图,图中按逆时针方向对3条履带进行了从 1到 3的编号,ω1,ω2,ω3分别表示 3条履带的转动角速度,方向符合右手定则,VyOVx为车体坐标系,ωz为车体中心转向角速度,圆柱辊子与轮轴的夹角均为45°。设三角形车体中心点O到履带对称中心线的垂直距离为l,履带的主动轮半径为R,那么根据1.1的分析过程和式(11)可以得到履带式三角形全方位移动平台的逆运动学方程为

由式(15)可知,雅可比矩阵的秩有 rank(K)=3,满足全方位运动的条件,故履带式三角形全方位移动平台能够进行全方位运动。
根据式(12)和式(15)可知平台的中心转向角速度表达式为

2.2 履带式三角形车体全方位移动平台仿真与分析
3种平台的Adams模型如下页图8所示,测量可得l=0.685 m,R=0.112 m。为了方便将仿真结果进行对比,设定ωz=1 rad/s,假设每个平台3条履带的角速度都相等,则根据式(16)有 ω1=ω2=ω3=6.116 1 rad/s。
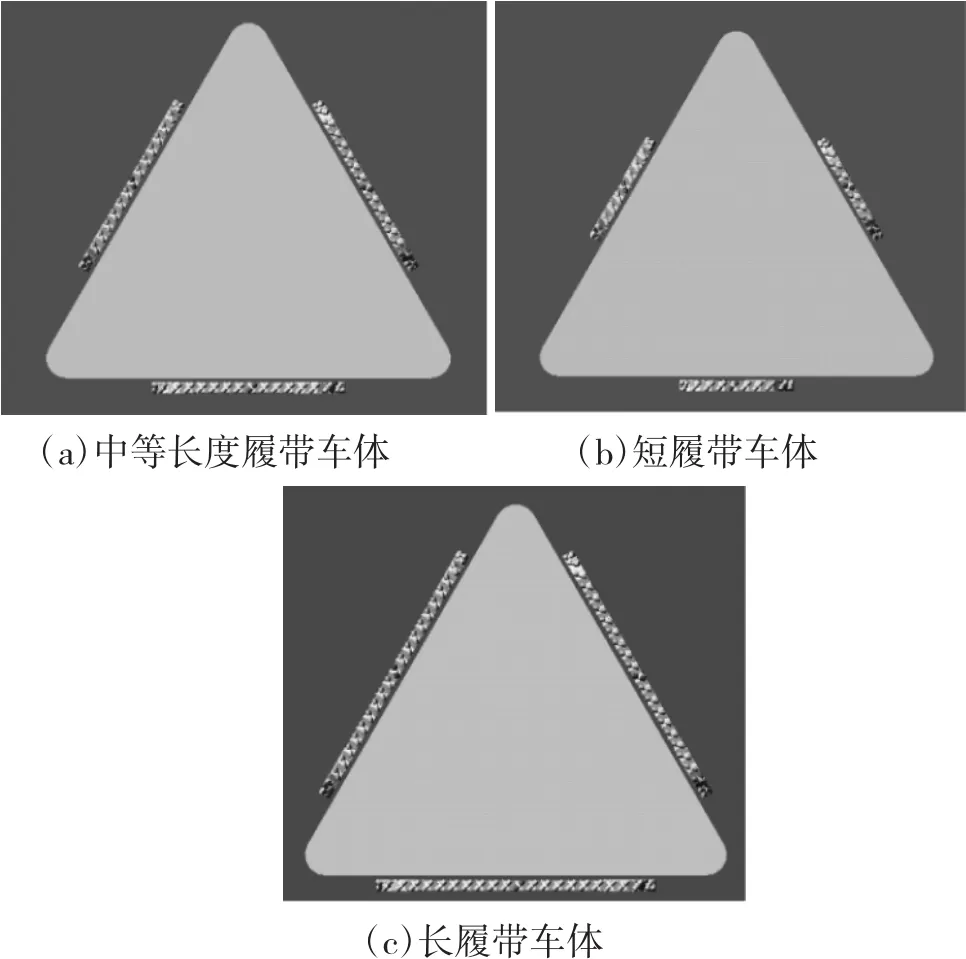
图8 3种平台的Adams模型
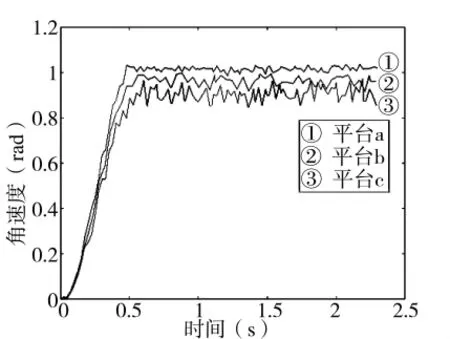
图9 3种平台的中心转向角速度值平均值
3种平台经仿真验证均能实现平面上的全方位运动,主动轮的速度输入均为 STEP(TIME,0,0,0.5,6.116 1),参数和仿真结果对比见表 1,其中的中心转向角速度平均值是取0.5 s之后的中心转向角速度值求均值得出,仿真结果如图9所示。由表1和图9可知,3种平台的中心转向角速度误差都在10%以内,证明了相关公式结论和运动学方程的正确性。

表1 3种平台的参数和仿真结果
由表1和图9还可以看出,履带式三角形全方位移动平台的中心转向角速度平均绝对误差,随着履带接地长度的增加而增加,这是因为履带接地长度越长,与地面接触的小辊子的打滑积累越严重的缘故[9]。
3 结论
本文提出一种简便的履带式全方位移动平台的运动学推导方法,在满足1.1中4条假设的前提下,推导过程中将履带式全方位移动平台用圆柱辊子全方位移动平台代替。将此方法应用于矩形布局的履带式全方位移动平台,得出的运动学方程与现有文献的结论完全一致,并且已经过实车验证。将此方法应用于履带式三角形车体全方位移动平台的运动学分析,在Adams中建立3种履带长度不同的履带式三角形车体全方位移动平台,进行中心转向角速度对比仿真,得到3种平台的中心转向角速度平均绝对误差均在10%以内,证明该方法的正确性。