基于单片机的牲畜全自动喂食控制系统
2019-07-17刘源史锦云吴海云郭勇材解光传
刘源,史锦云,吴海云,郭勇材,解光传
基于单片机的牲畜全自动喂食控制系统
刘源1,史锦云1,吴海云1,郭勇材1,解光传2
(1. 天津农学院 工程技术学院,天津 300384;2. 天津市创辉津控科技发展有限公司,天津 300384)
为提高养殖场的智能化程度,实现牲畜精准喂养,本文设计了一种牲畜全自动喂食系统。该系统是以单片机为控制核心,控制投料机精确选料、配料、称重。设定喂食时间和喂食量,当达到设定时间点后,自动完成定量投料。采用节水控制电路,实现不间断供水、流量控制和水费统计。系统还对牲畜生活环境和喂食环境的温度、湿度、光照参数进行实时监控和显示。除此之外,为了节约能源,系统选用太阳能供电方式。
单片机;牲畜;喂食;自动控制
养殖行业随着规模化时代的到来,降低养殖成本,提高经济收益,降低劳动用工,净化养殖环境,提升牲畜产品品质是机械化、自动化、智能化发展的要求[1]。目前,国内规模的养殖场已实现了机械化和自动化。典型的如行车式喂料机,但这种喂料方式无法实现统一喂料[2]。刘丹等设计的新型智能喂养系统,用食物盛装盘和水盛装盘控制投料量,用户按需求可设定每天喂养的次数和喂料时间[3]。但该方式很难适应规模化生产要求。西方国家的养殖场自动化程度很高,节假日养殖场可无人化运行[4]。大规模养殖场智能化饲养设备使用率达到了60%以上,由于精准控制,料肉比、料蛋比都比较高[5]。这些设备运用计算机、大数据控制,通过计算机设置称量饲料的重量和投放时间,然后通过链路和管道传送到每个食槽,精度很高,但是成本也相对较高[6-7]。为适应中国自动化生产模式的要求,提高智能牲畜喂食系统的性价比,实现无人农场和智慧农场目标,设计了牲畜全自动喂食控制系统。该系统可实现规范化、养殖标准化和执行精细化和全自动化管理。
1 硬件系统组成及工作原理
牲畜全自动喂食控制系统是由上位机可编程控制器(PLC)控制系统和下位机单片机控制系统组成。上位机PLC控制系统是由PLC控制模块和数据传输模块组成。下位机单片机控制系统(图1)由控制模块、喂食模块、供水模块、供电模块、环境控制模块和数据传输模块组成。上位机和下位机数据传输采用电力载波实现。
单片机控制系统以ATmega328为主控单元,控制模块对牲畜喂食过程进行控制。当投料时间到,PLC控制模块将饲料配方通过数据传输模块传给下位单片机,单片机开启投料机,实现配料。当达到设定的喂食时间后,控制模块控制喂食模块进行喂食,喂食完成后,等待下一次设定时间的到来,重复操作。当单片机通过液位传感器检测到水箱内水位下降到一定值时,控制水泵开启,到了水箱控制位置,控制水泵停止。注水时有流量传感器计算流量。喂食量、喂食时间、饮水量、水费、喂食环境温湿度、光照信息通过对应的传感器检测后,经数据传输模块传给上位机,在PLC显示屏上实时显示。喂食环境温度、光照和通风控制均由单片机实现,太阳能为控制模块供电。
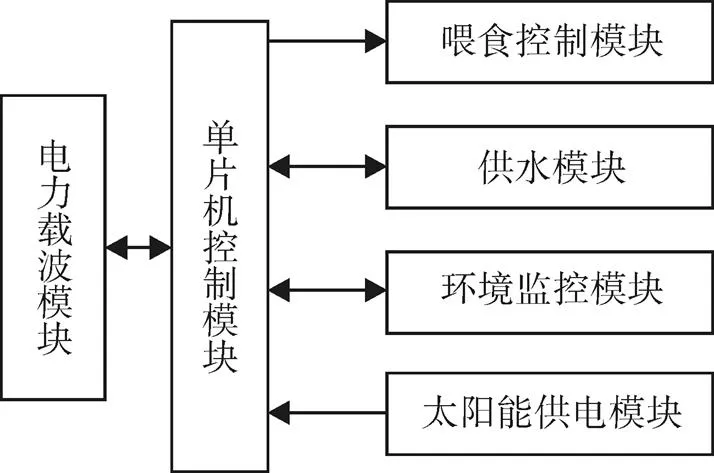
图1 单片机系统结构框图
2 模块设计
2.1 单片机控制模块
控制模块由主控器、电机控制驱动、时间芯片组成。主控器选取作为程序存储控制芯片,根据DS1302计量时间,在单片机的控制下,完成喂食、供水、环境控制等操作。
2.1.1 主控器
控制器采用Arduino控制板。Arduino以ATmega328单片机为控制核心,是一款便捷灵活开源硬件产品,具有简便的编程环境IDE,预留了非常友好的第三方库开发接口,有极大的自由度,可拓展性能强。
2.1.2 电机控制模块
系统使用光耦继电器控制饲料阀门和水泵开关(图2)。光耦的作用主要是隔离传输、控制,可防止干扰和故障的扩大化。IN1信号输入电压0~5 V。当到达设定的喂食时间,继电器控制饲料阀门打开,到达设定量后继电器控制阀门关闭;水位低于低处的水位传感器时控制水泵开启,水位到达高处的水位传感器后继电器控制水泵关闭。
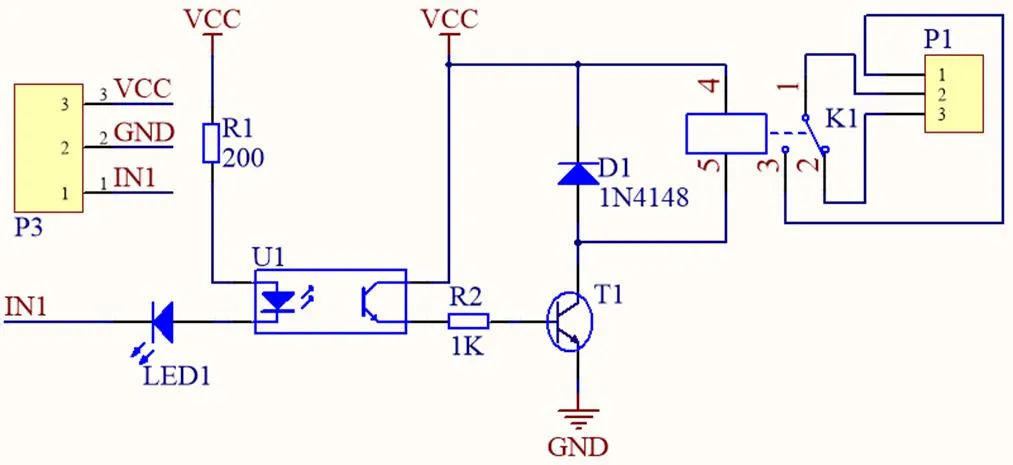
图2 继电器电路
2.1.3 定时模块
选用时间芯片DS1302为定时模块,是一种低功耗、高性能、带掉电保护的实时时钟电路,工作电压为2.5~5.5 V。采用串行三线接口和CPU进行同步通信。定时模块提供喂食时间控制、环境分时控制所需要的中断信号。
2.2 喂食控制模块
2.2.1 投料系统
上位机可以根据牲畜种类、年龄科学设定牲畜的饲料配方和食量参数,并通过数据传输模块,定时传送给下位单片机,单片机可根据配方,实现配料时进料阀门电机的控制,控制饲料称重,投料时的舵机控制等动作。
进料阀门控制如电机控制模块。饲料称重采用单片机读取RP-C18.3-ST压力传感器的信息,控制进料阀门的开关。
舵机主要用于控制送料装置,单片机通过控制旋转360°的舵机,控制料筒下面的挡板移开角度,控制饲料下放到食槽之中。
舵机的控制信号是周期为20 ms的脉宽调制信号(PWM),其中脉宽从0.5~2.5 ms,相应的舵盘位置从0~180°,呈线型变化[8-9]。给舵机提供一定的脉宽,其输出轴就会保持一定的对应角度,停到对应的位置上。
2.2.2 喂食过程控制
当设定喂食时间到,开始给牲畜喂食。阀门打开,配制的饲料从储料箱漏到食槽,槽体内壁装有可调节高度的红外对管模块,通过调节红外对管的高度控制饲料用量,当饲料达到红外对管高度后,饲料对红外对管形成遮挡,将信号传给单片机,控制阀门关闭,否则继续投料。直到喂食控制时间到,结束喂食。
2.3 供水模块
喂食同时,系统提供不间断供水,保证牲畜都可喝到水。节水控制模块由单片机、YF-S201水流量传感器、DLK201水位传感器组成。由Arduino接收水流量传感器测得的流量数据,与感应水龙头进行硬件连接。在储料箱旁有储水箱,储水箱外壁粘两个水位传感器,一个在储水箱的侧壁底部,一个在储水箱的高处,当水位下降到底部传感器,传送给单片机信号,通过单片机控制继电器从而控制水泵向水箱内注水,当高处的水位传感器检测到水时,水泵停止蓄水[10]。
单片机采集水流量数据实时显示在PLC触摸屏上,通过单位时间内的水流量与水的价格计算得到水费。
2.4 供电模块
供电系统需要提供12、24、220 V电源。太阳能供电系统(图3)由MZG-30a太阳能控制器、太阳能板、12 V蓄电池组成[11]。单片机通过继电器控制蓄电池供电的开断。控制系统工作时,蓄电池停止充电。太阳能控制器起到充电过量的保护作用,防止蓄电池充电过满后发生爆炸。
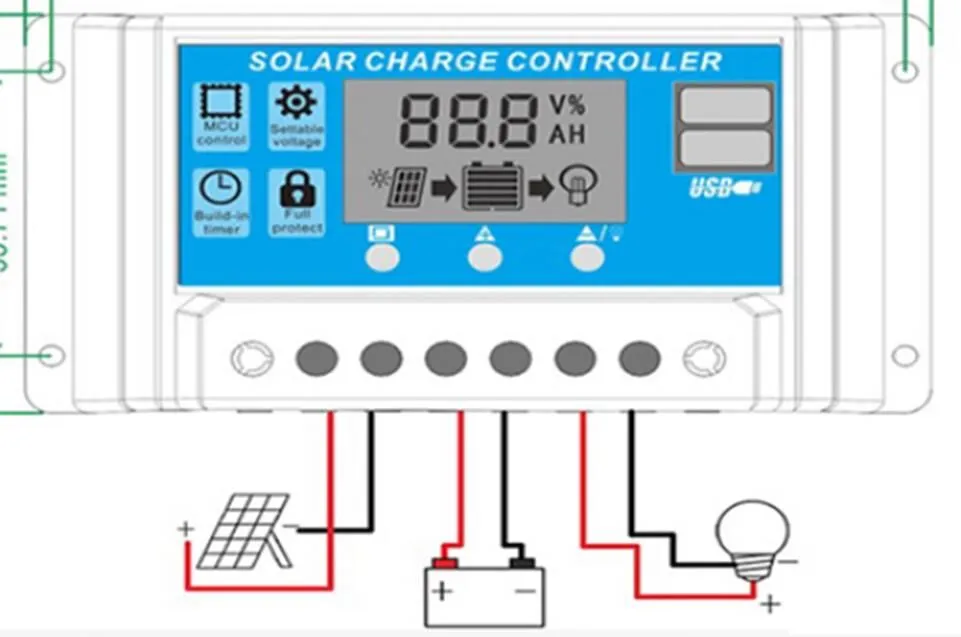
图3 太阳能控制器、太阳能板和负载的接线图
2.5 环境控制模块
环境智能控制系统由Arduino UNO板作为主控板,与温湿度传感器DHT11和光照强度传感器GY-30相连接。通过实时采集温湿度值和光照强度值,控制3个继电器开闭。用3个固态继电器分别控制补温灯泡、补光灯泡和风扇。控制补温灯泡的继电器的负端接数字引脚9,控制补光灯泡的继电器的负端接数字引脚6,控制风扇的继电器的负端接数字引脚10。通过软件编程,实现牲畜生活环境的智能控制。环境控制连接如图4。

图4 环境控制系统
2.6 电力载波模块
电力载波采用ST7540芯片。采用移频键控(FSK)调制方式,半双工通信,电力线通信速率 4 800 bps[12]。两个电力载波模块分别与单片机和PLC模块连接。接收/发送(RX/TX)引脚要交叉连接,电力载波12 V供电,将单片机与PLC利用电力载波模块以及一个485模块连接起来,需要实现单片机将采集到的传感器数据送到PLC并显示出来。
电力载波模块通过加载不同的载波频率可以将大量不同种类的数据进行远程传输。接收数据时,可以将数据调制解调完成数据接收,实现用电力线进行长距离的数据传输功能。
3 软件系统设计
3.1 主程序设计
系统软件设计是在Windows 8系统下,运用Keil uVision4软件进行程序编写。主程序是整个系统的主体,通过不断循环扫描执行,所以在主程序中将判断什么时候调用各个子程序。其主程序设计流程图如图5所示。
投料机控制程序,主要完成按饲料配方定时打开对应的阀门开关,读取称重值,达到规定重量,关闭阀门,直到配料完成。当喂食时间到,打开投料阀门,将饲料投入食槽。根据不同牲畜种类和大小,设定不同标准的温湿度、光照环境控制参数。根据读到的当前各参数值,控制补温灯泡、补光灯泡和风扇的开关。

图5 主程序设计流程图
3.2 单片机与PLC之间的通讯
将单片机与PLC利用电力载波模块以及一个485模块连接起来,需要实现单片机将采集到的传感器数据送到PLC并显示出来,数据传输流程图如图6所示。数据传输采用485协议。图6读数据的位数是为了判断数据格式是否正确。若格式不正确,不向PLC发送数据。
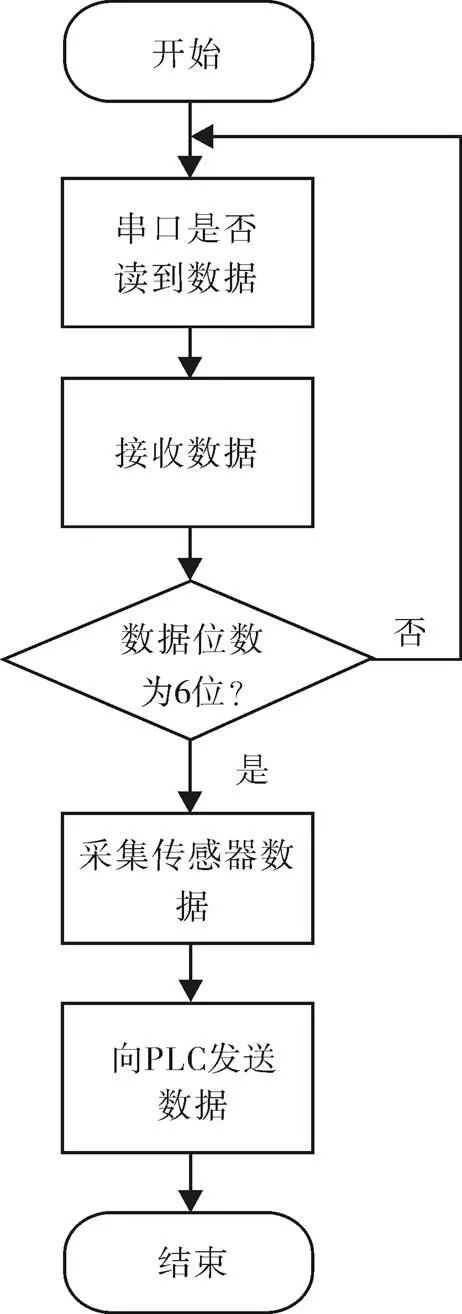
图6 数据传输流程图
4 系统调试
系统运行后,当投料时间到,PLC控制模块将饲料配方传给下位单片机,单片机开启投料机,实现饲料的配料。当达到设定的喂食时间后,控制模块控制喂食、喂水。牲畜的饮水量、水费和喂食环境温湿度、光照信息在PLC界面显示屏上实时显示(图7、图8)。系统运行正常。温湿度传感器采集到的温度精确到0.1 ℃,湿度精度达到4.5%RH。
用UNO板给舵机供电时,除了要达到舵机的工作电压外,还要考虑舵机转动所需的供电电流,否则舵机不能正常工作。用增大电压来增大电流,若超出舵机正常的工作电压会烧毁舵机。

图7 PLC的智能节水界面

图8 PLC环境控制界面
5 结论
在无人看管的条件下,该系统实现了牲畜喂食过程的全自动化控制,特别是系统可根据牲畜生长需求,动态调整饲料配方,自动完成配料和投料。喂食环境控制保障牲畜肉质品质。节水、节能降低了养殖成本。系统为牲畜喂养的标准和执行的精细化、实现农场的科学化管理提供了保障。
[1] 刘志杰,赵丽敏,向钊豫. 智慧农场技术的研究与实现[J].企业技术开发,2017,36(8):19-22.
[2] 马增强,周杨. 现代化智能立体生猪养殖系统设计[J]. 自动化博览,2018,35(S1):58-61.
[3] 刘丹,胡旭波. 基于ATmega88V单片机的智能喂食系统设计[J]. 电子元器件应用,2008(2):14-19.
[4] Mondal R,Mukhopadhyay A,Basak D. Embedded system of DC motor closed loop speed control based on 8051 microcontroller[J]. Procedia Technology,2013,10:840- 848.
[5] Hussin R,Kafrnawi M T. Modelling of control system’ performance using microcontroller[J]. Energy Procedia,2012,19:303-309.
[6] Gong Q H , Li T G. Research of stepper motor control based on SCM[J]. Applied Mechanics and Materials,2013,401/403:1619-1622.
[7] 周锦荣,张振宇,袁忠强. 家居宠物智能喂食管理控制系统设计与应用[J]. 家畜生态学报,2019,40(4):77-80.
[8] 何乙琦. 舵机控制步行机器人系统设计[D]. 南京:南京理工大学,2012.
[9] 杨康,刘源,曾雅楠. 酒驾检测与控制系统的实现[J]. 天津农学院学报,2017,24(3):85-87.
[10] 张晓军,王少平,叶铭铭,等. 基于多传感器水流量识别的节水循环控制系统[J]. 计算机与数字工程,2018,46(5):1038-1042,1051.
[11] 潘凤红,兰建军,李宇. 太阳能充电控制器系统设计[J].电源技术,2016,40(7):1460-1461,1486.
[12] 梁波,杨铭海,孙洪庆. RS485通信与载波通信相结合的用电信息采集方式[J]. 电世界,2015(2):16-17.
Automatic feeding control system for livestock based on SCM
LIU Yuan1, SHI Jin-yun1, WU Hai-yun1, GUO Yong-cai1, XIE Guang-chuan2
(1. College of Engineering and Technology, Tianjin Agricultural University, Tianjin 300384, China; 2. Tianjin Chuanghui Jin Control Technology Development Co., Ltd.,Tianjin 300384, China)
An intelligent feeding system was proposed in this paper to improve the intellectualization of the farm, to save manpower and fullfull the precise feeding of livestock. The system was controlled by the single chip microcomputer to realize precise selection, dosing and weighing of the feeder. By pressing buttons in this system, the time of feeding and amount of food of each feeding time can be set and the livestock was fed automatically at the setting time. The water was supplied continuously and controlled by water saving control circuit to get flow control and water cost statistics. The temperature, humidity and lighting monitor and display in real time and other functions were included in this system. In addition, solar power was utilized by the system considering energy saving.
SCM; livestock; feeding; automatic control system
S818.5
A
1008-5394(2019)02-0069-05
10.19640/j.cnki.jtau.2019.02.016
2019-02-27
天津市科技计划项目(18JCTPJC69100)
刘源(1964-),女,教授,硕士,主要从事检测与控制方向研究。E-mail:lywzwzly@126.com。
责任编辑:杨霞