基于Hough Circle变换检测直线加速器等中心位置偏差的研究分析*
2019-07-16吴思宇康德华伍海彪马彦凝黄晓延
吴思宇 康德华 伍海彪 陈 利 马彦凝 黄晓延*
医用电子直线加速器是当前治疗肿瘤的重要设备,而加速器等中心精确度直接影响放射治疗计划的执行,是保证放射治疗质量的关键因素。在日常使用中,由于环境、运行损耗和故障维修等因素,会改变机器等中心精度,从而造成一定的误差[1-4]。验证等中心精度方法主要包括机械力学测量和影像分析两大类,机械力学测量主要依赖人肉眼分析,虽然经济实惠,但精度远不及影像分析,目前基于影像分析等中心精度主要依赖胶片及相关分析仪器或软件,但成本较高,难以将等中心检测纳入常规质量控制中[5-7]。从质量效率和成本效益方面考虑,本研究拟基于电子射野影像装置(electronic portal imaging device,EPID)图像,采取数字化图像处理的方法,实现直线加速器转动过程中的等中心径迹追踪,对确定等中心位置,提高精度有一定借鉴作用。
霍夫圆变换(Hough circle transform,HCT)是一种基本的数字图像处理算法,主要用于检测数字图像中圆的特征提取技术,自动探测圆心的像素绝对误差达到0.037±0.019,常规的电子射野成像分辨率是0.5 mm,转换成平均探测误差为0.02 mm[8-9]。而肉眼观察到的分辨率为(0.042±0.294)mm,使得探测精度比肉眼观察到的和图像分辨率都要高许多[10]。本研究应用HCT算法探测圆边界,探讨图像等中心的位置信息。
1 材料与方法
1.1 仪器设备与参数
(1)实验采用Trilogy型医用电子直线加速器(美国Varian公司);BRAINLAB Lightfield Pointer/WL Pointer X刀专用验证设备(德国Brain LAB公司)。
(2)能量为6 MV光子线,非晶硅平板探测器(a-Si EPID),有效探测面积为40.96 cm×40.96 cm,分辨率为0.39 mm,输出16位像素为768×1024的图像[11]。使用博医来X刀专用验证设备,直径为35 mm的立体定向放射治疗准直器(stereotactic radiation therapy Cone,SRT Cone)及其安装在准直器上的托架,等中心摆位标记帽LAB指针(LAB pointer)和直径为3 mm的金球光野指针及安装在治疗床头的托架。在个人计算机上用Matlab 9.1(R2016b)软件处理图像。
1.2 实验方法
(1)在机架角度和准直器角度均为0°时,将SRT Cone托架固定在加速器机头的准直器上,安装直径为35 mm的SRT Cone。将EPID安全伸出到固定位置(-40,0,0),即源到探测板的距离(source image distance,SID)为160 cm。治疗床角度为0°,将指针托架(X刀托架)固定在治疗床头,将带摆位标记帽的指针固定在托架上,打开光野,使得指针落在光野的中心,微调托架上的旋钮,使标记帽上的摆位线对准已校准过的激光线,将指针换成金球,此时金球的位置即为加速器的等中心位置[12-13](图1)。
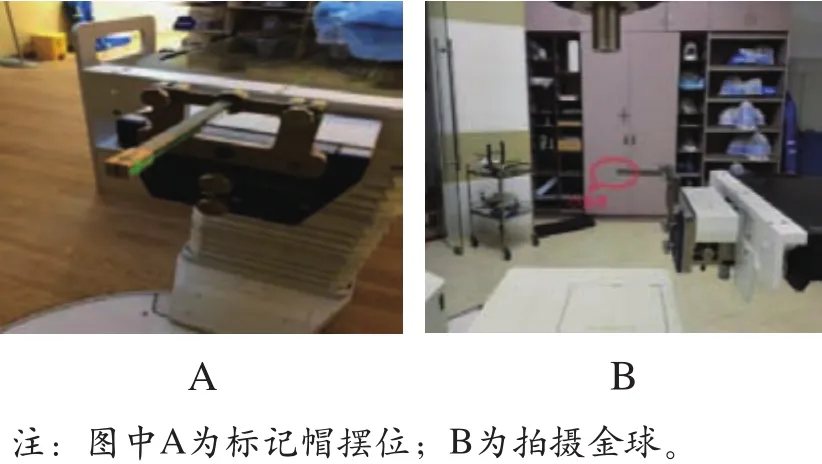
图1 等中心摆位示意图
(2)设置射野大小为6 cm×6 cm,机架角度为0°,采集EPID本底图像。加速器输出2 MU后拍摄小金球的EPID图像,转动机架角度,间隔30°拍摄1次,共拍摄12个空间位置,如此反复3次,导出图像文件。
1.3 图像处理
(1)使用Matlab软件编程,读取导出的医学数字成像及通信(digital imaging and communication of medicine,DICOM)文件,转换成jpg格式,画出金球和SRT Cone在X方向上像素值变化的曲线及微分曲线图像成像质量尚佳,灰度分割较明显,半影边界清晰,有利于对图像进行处理分析[14-15](图2)。
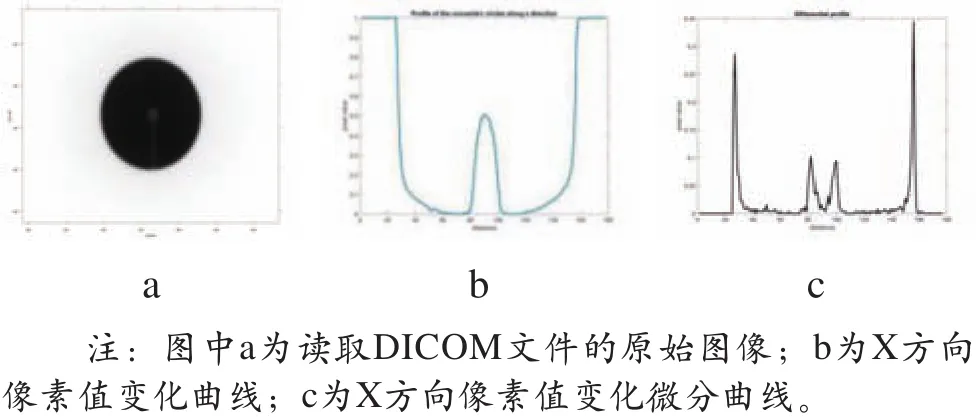
图2 图像成像质量分析
(2)使用最大类间方差法自适应获取精确的阈值,将灰度图像二值化后填充图像,给定半径探测范围检测SRT Cone的边界,计算中心点坐标。裁剪图像到合适的尺寸,使用直方图均衡化增强对比度,自适应获取阈值,再将灰度图像转换成二值图像,给定半径探测范围检测金球边界,计算中心点坐标(图3)。
(3)根据HCT自动探测提取圆的特征技术,此时探测到的圆半径与实际物理上的圆半径等价,其计算为公式1:
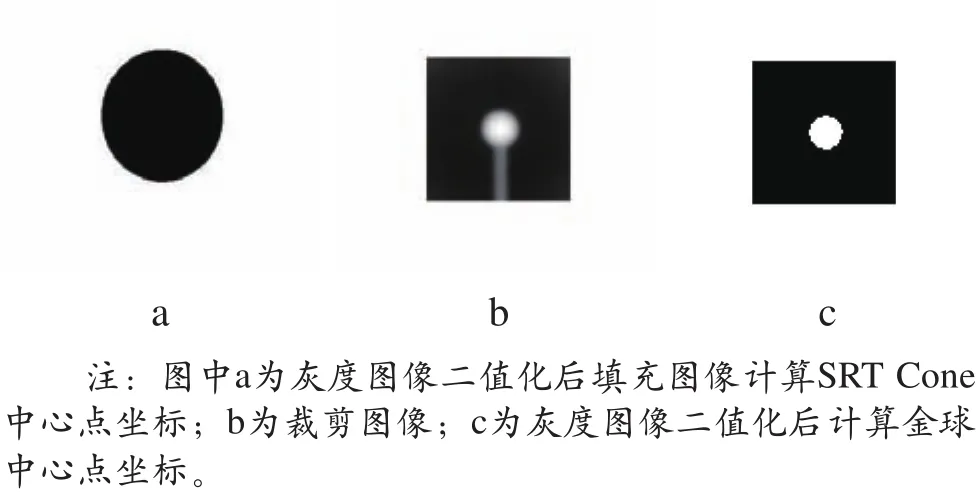
图3 图像处理过程

(4)为更直观地显示出2个圆的轮廓,根据自动探测到的边界勾画圆周,见图4。
1.4 计算误差
SRT Cone的真实半径与探测到的半径之比即为每一个像素误差,再将该像素误差转换为毫米误差,计算2个圆心位置之间的偏差,得到等中心位置的平面偏差坐标(Xi,Yi),其中i=1,2,之间的偏差分别表示12个机架角度的位置,再换算到空间位置,α表示机架角度,空间3个方向的位置偏差计算为公式2:

算出误差大小为公式3:

式中R为误差大小。
2 结果
2.1 等中心处误差数据
实验测量各机架角度对应等中心处取误差大小数据,机架在30°和330°的2个对称位置偏差最大,处于0°时等中心在X方向(AB方向)偏差最大,顺时针旋转到150°的过程中,误差逐渐减小,在臂架处于150°时等中心偏差最小。在90°~150°和210°~270°的2个对称位置等中心偏差较小且递减,表明臂架处于这2个位置时较为稳定,对机器等中心影响较小(见表1)。
由表1计算出误差均值[ΔXi,ΔYi,ΔZi]=[-0.3665,-0.1459,-0.1311],即机器等中心平均误差大小为偏差<0.5 mm满足临床使用条件。
2.2 误差数据分析
由表1作出误差平面分布散点图,机架转动一周,误差在平面方向上近似呈两条平行线型增长,等中心投影到平面上在某一方向上随着机架转动误差逐渐增大,当转到对侧位置时又逐渐减小。空间分布散点图分析X、Y和Z的3个方向(分别对应加速器AB、GT、UD方向),在X方向上小球偏向A侧,GT和UD方向偏差较均衡。为更加直观看到小球在空间位置的误差分析,根据内插值法拟合曲线,能够得到误差在空间分布近似球型图,等中心偏差在1 mm范围内波动(图5)。

表1 等中心在平面和空间位置的误差
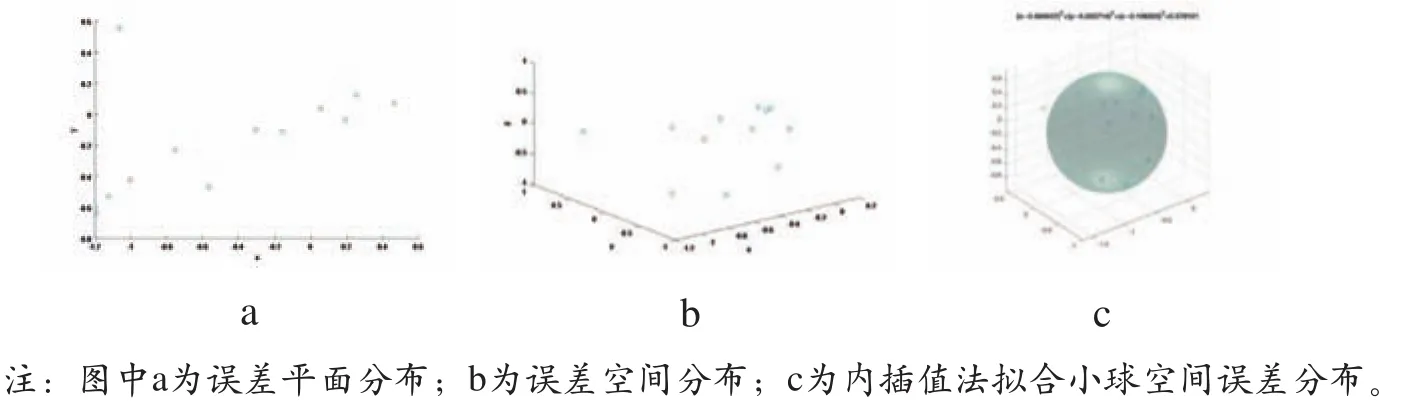
图5 误差分析示意图
3 讨论
本研究中直线加速器的等中心偏差测量利用一套SRT验证专用设备,是基于SRT小野照射、剂量特别集中、剂量梯度靶区边缘特别陡峭等特点,选用6 cm×6 cm照射野,直径35 mm的SRT Cone及直径3 mm的金球,使加速器输出剂量集中,减少散射线对成像质量的影响。从图2、图3的像素曲线可以看出,图像成像质量尚佳,灰度分割较明显,半影边界清晰,为识别圆边界探测提供较好的图像基础。通过不断调整机架角度,用EPID拍摄获取图像,由于获取的图像为等中心点随机架转动各个角度的相对误差大小,故此误差大小与机架转动过程中SRT Cone、EPID和机架本身的晃动带来的影响极小。
在本研究中,基于Matlab软件平台编写程序对图像进行处理,应用HCT算法检测2个圆的边界,通过读取像素值精确地计算出2个圆心的位置偏差,亦可换算到空间中难以观察到机架角度等中心偏移的位置关系,能较直观地反映出等中心的位置。从数字图像方面对等中心位置进行分析,探测精度较肉眼观测到的提高了1倍,平均探测误差为0.02 mm,肉眼观察到的分辨率为(0.042±0.294)mm,直接在图像上反映出等中心在各个方向的位置偏移量,能够获取更丰富的位置信息,在一定程度上提高了质量控制精度。从实验结果来看,机架转动过程中AB方向稳定性略差,等中心略偏向A侧,这可能与加速器是轴承式装配结构有关。
本研究提供一种研究分析等中心精度的思路方法,EPID拍摄取代传统的胶片测量,节约成本,操作流程简便,每次拍摄后只需在后台应用Matlab平台调用程序分析图像即可,减少质量控制占用机器的时间,这对加速器等中心质量控制有一定指导意义。
