采用安全态势评估的PHEV节能控制策略
2019-07-11高建平徐振海雷朝阳郗建国
高建平,徐振海,雷朝阳,郗建国
(1.河南科技大学车辆与交通工程学院,471003,河南洛阳;2.河南科技大学机械装备先进制造河南省协同创新中心,471003,河南洛阳)
面对能源危机和环境污染,改变能源使用结构、开发利用新型能源和相关节能技术,以减少对不可再生能源的依赖和环境污染已成为全球发展的共识[1]。发展新能源汽车,从交通和汽车工业的角度带动并引领能源产业革命是当前汽车技术研究的热点[2]。插电式混合动力汽车(PHEV)具有比普通混合动力汽车(HEV)更好的经济性和排放性能,以及比纯电动汽车(EV)更长的续驶里程,其控制策略作为保障多动力源协调工作的核心,直接影响整车动力性和经济性[3]。
PHEV控制策略主要包括基于规则的和基于优化的控制策略,前者包括基于确定规则的和基于模糊规则的策略,后者包括基于全局优化的和基于实时优化的策略[4]。文献[5]通过基于规则的策略分配发动机和复合电源之间的功率,由模型预测控制(MPC)实现对动力电池与超级电容之间的控制。文献[6]通过不同车速的电力状态转移概率矩阵来预测车辆的用电需求,不仅将动力电池的电量限制在一定范围内,而且降低了动力电池的峰值和平均充放电功率,降低了复合电源的整体损耗。文献[7]利用模拟退火粒子群优化算法对HEV能量控制策略进行参数优化以实现最小油耗。随着智能网联技术的发展,毫米波雷达等无线传感技术的可用性和可承受性越来越强,其获得的驾驶环境数据正在变得可用,为整车控制的进一步优化提供了可能[8]。文献[9]考虑到路面水平曲率的影响,利用动态规划推导出不同曲率路面对应的最优恒定速度,以此达到节能的效果。文献[10]将驾驶行为视为随机扰动,用等效消耗最小化策略对随机模型预测控制进行了改进。尽管这些策略在一定程度上改善了PHEV的经济性,但均依赖于固定标准循环工况,与实际道路行驶存在一定的偏差,并且忽略了前方车辆运动状态等信息动态时变的影响,而车辆在实际行驶时往往对前方车辆的运行状态较为敏感,常常根据前车的状态实时调整车速,因此在车辆节能性方面有待进一步优化。
为了进一步挖掘PHEV的节油能力,本文通过共用多传感器获取的驾驶行为特征和车间运动特征,结合模糊推理和数据驱动的方法,对当前行驶情景的安全态势进行评估,以此得到一个安全态势量化值。利用由多岛遗传算法(MIGA)和序列二次规划算法(NLPQL)组成的组合优化算法,以实际道路行驶数据拟合的工况对关键控制参数进行优化。依托安全态势量化值,将车辆行驶情景划分为4种水平,通过在不同水平对电机进行不同程度的驱动转矩限制和制动转矩增大,既可以避免行驶过程中出现较大的加速度,又可以获得更多的制动能量回收,实现安全性与经济性的双重效果提高。
1 基于模糊推理的安全态势评估
当前大多数安全态势评估方法通过计算单一的评价参数(碰撞时间TTC、车头时距THW、碰撞距离DTC等),并与不同级别的默认阈值进行比较来确定其级别[11],而实际行驶过程中,安全态势主要取决于驾驶员对车辆的操作以及周围车辆的运行状态,单一的评价参数无法描述其整个动态变化过程。因此,文中综合考虑驾驶行为和车间运动特征进行安全态势评估,如图1所示,包括安全态势的在线评估过程和隶属度函数的离线确定过程。
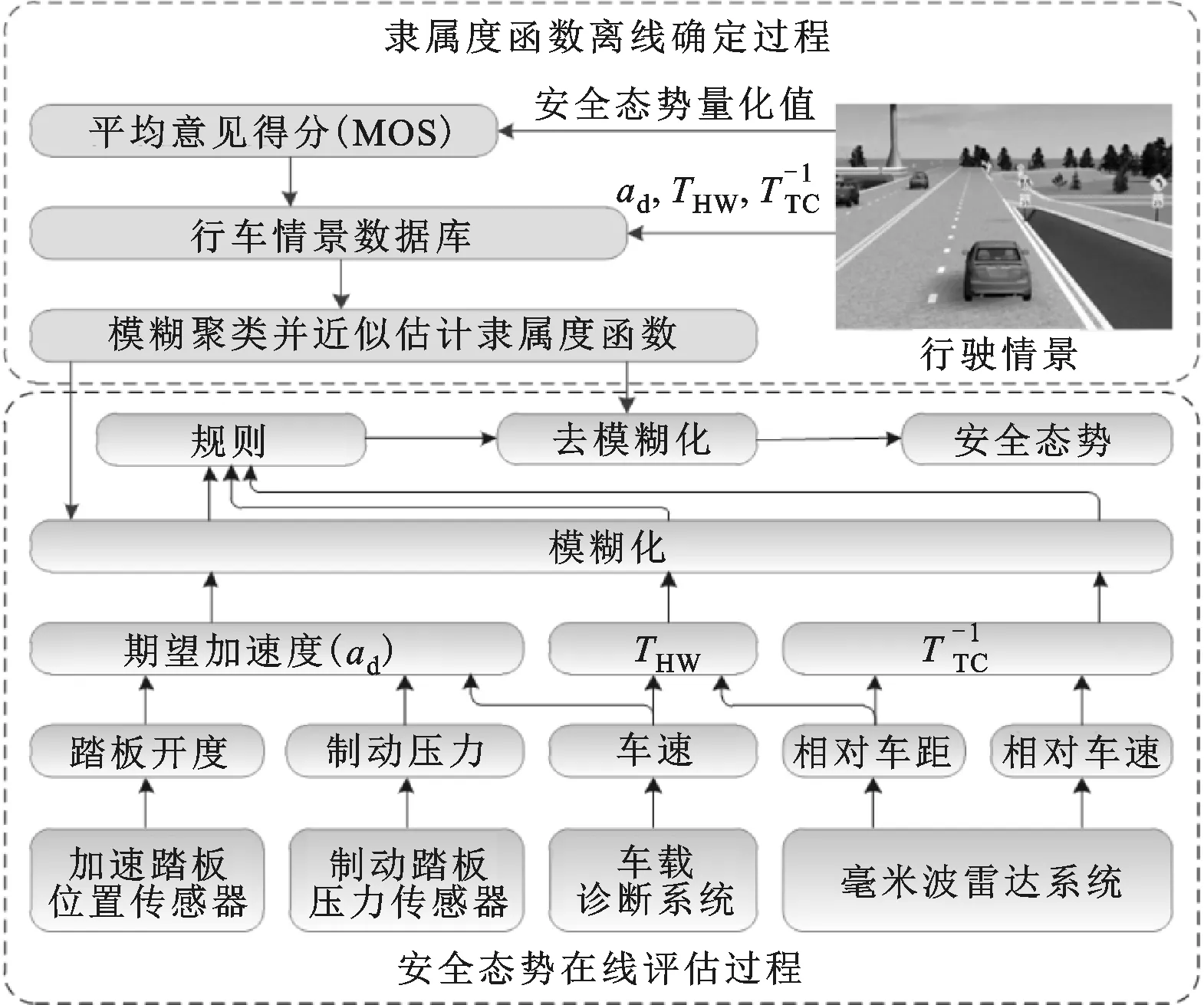
图1 安全态势评估示意图
若前车不存在或距离较远时,其运行状态对后车安全态势的影响微乎其微,考虑到自适应巡航系统通常将安全时距设定为1.5~2.5 s[12],因此当两车间的距离超过一定的阈值ds时,其安全态势的量化值可视为0,此时车辆处于自由行驶模式(FD)。安全态势评估的一般流程如图2所示,其中,Ts为默认时距阈值,d0为最小安全距离,文中Ts=2.5 s,d0=4 m。

图2 安全态势评估的一般流程
1.1 评价参数的选取
实际行驶过程中,驾驶员的纵向驾驶行为体现在对加速踏板或制动踏板的操作上,以达到其期望的加速度ad,因此文中使用ad作为驾驶行为对当前行驶情景安全态势影响的评价参数,其计算方式为
(1)
式中:m为整车质量;v为车速;Ta为驱动轴输出转矩;Tb为制动转矩;Rw为车轮滚动半径;g为重力系数;θ为道路坡度;ρ为空气密度常数;A为迎风面积;Cd为空气阻力系数;Cr为滚动阻力系数。
常用于描述车间运动特征的评价参数包括DTC、THW和TTC,计算式为
(2)

模糊推理时,每个变量均可以看作具有S(S≥2)个模糊集合,每个模糊集合表示不同的类别。文中模糊推理系统输入变量以及输出变量SS(安全态势)的模糊集合类别如表1所示。
1.2 隶属度函数的确定
传统隶属度函数确定方法大多依赖专家经验,
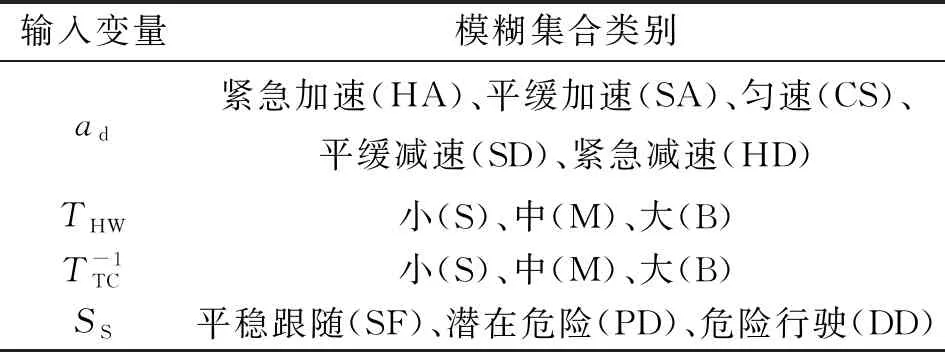
表1 各变量模糊集合类别
在很大程度上受到人为的干扰[14]。模糊聚类确定隶属度函数的方法是一种基于数据驱动的方法,其目的在于根据样本数据内部的关联性与相似性进行模糊聚类,之后利用常用的隶属函数近似逼近各变量的隶属度函数,可以有效避免人为因素的影响,因此文中运用模糊聚类法确定隶属度函数。
1.2.1 建立行驶情景数据库 由于安全态势缺乏明确的定义,有必要在特定的驾驶条件下,通过大量的模拟实验,创建一个行驶情景数据库并量化安全态势,以确定各变量的隶属度函数。PreScan是一种汽车主动安全模拟平台,可连接至第三方的汽车动力学模型和HIL模拟器/硬件,用于数据采集和自动化测试等活动[15]。文中联合PreScan、Matlab与驾驶员模拟器以模拟真实的驾驶情景,如图3所示,8名具有1~5年驾驶经验的驾驶员进行了模拟实验。
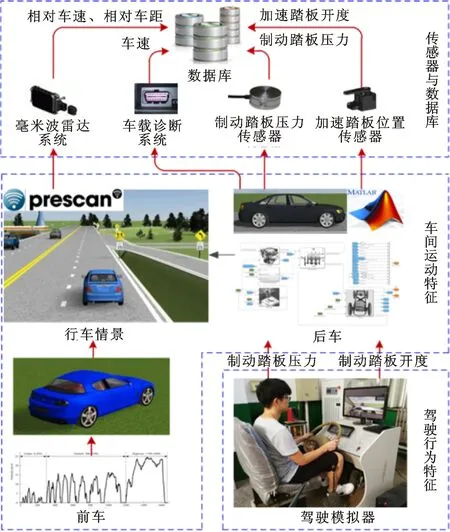
图3 数据采集方案示意图
考虑到模拟过程中行驶情景的数据量相当庞大,文中首先采用K均值聚类算法和平均意见得分法(MOS)对安全态势进行标注量化,具体步骤如下。
步骤1将行驶数据划分为N个集合,以集合中心表示整个集合。对于N的取值,较大的N可以更准确地近似安全态势,但是观察者无法在短时间内对MOS测试进行量化。反之,当N过低时,MOS测试的结果很平滑,但集合内部的差异性过大,量化的准确性下降。根据文献[16],N=70能够在MOS测试中得到合理且精确的量化结果。
步骤2观察量化安全态势。本文共征集了27名观察者的观察结果,其中,观察设置如下:平稳跟车,得1分;潜在危险,需要驾驶员谨慎驾驶,得2分;危险行驶,需要驾驶员集中注意力并做好随时制动的准备,得3分。
步骤3计算安全态势得分的平均值。考虑到观察者的驾驶经验存在一定的差别,文中更注重那些经验丰富的观察者所给出的分数,计算式为
(3)
式中:Ski是第i个观察者给出的第k组的分数;wi是第i个观察者驾驶经验的权重,3 a以上取wi=0.5,2~3 a取wi=0.3,1~2 a取wi=0.2。表2为所得到的各类中心和行驶情景安全态势的量化值。
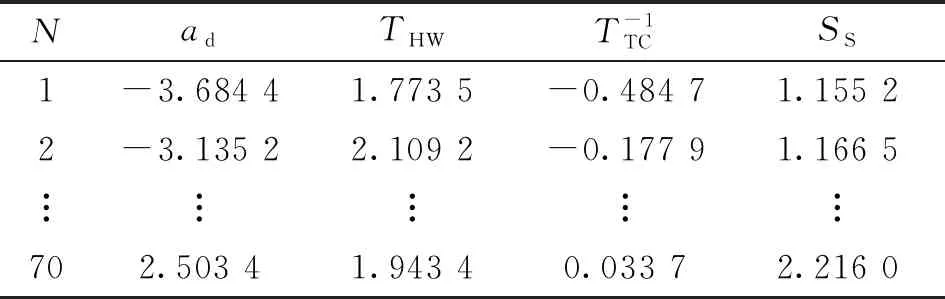
表2 各变量模糊集合类别
1.2.2 模糊聚类确定隶属度函数 文中以ad为例,其隶属度函数的确定过程如下。
(1)模糊聚类。①采用欧几里得距离法[17]建立样本间的相似关系。假定ad的数据为(ad,1,ad,2,…,ad,n)T,其中任意两个元素ad,i与ad,j之间的相似系数为
(4)
式中δ为一个常数,定义如下
(5)
得到一个n维的相似矩阵Rs(rij=R(ad,i,ad,j))。
②计算Rs的模糊等价矩阵Re
(6)

③通过阈值λ得到等价矩阵Re的λ截矩阵Re,λ,并根据Re,λ对ad进行分类。若Re,λ(ad,i,ad,j)=1,则ad,i与ad,j属于同一类,其中λ∈[0,1],根据分类数确定。
(2)利用三角形隶属函数近似估计隶属度函数。假定ad分为K类,即C1,C2,…,CK,其中,第h(1≤h≤K)个模糊集Ch包含Nh个元素。文中需要确定三角形的3个顶点(ah,0)、(bh,1)、(ch,0),计算式如下
(7)
则模糊集合Ch的隶属度函数
(8)
(3)修正隶属度函数。在确定C1的隶属度函数时,通常认为当变量绝对小时,其绝对隶属于C1,即隶属度等于1,因此需要对其隶属度函数进行修正,同样CK也需要进行修正,修正方式分别如下
(9)
(10)

(a)期望加速度 (b)车头时矩
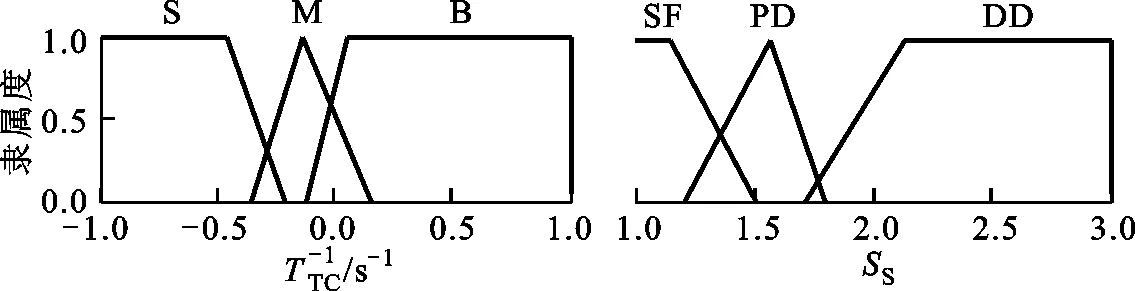
(c)碰撞时间倒数 (d)安全态势图4 各变量模糊集的隶属度函数
通过模糊聚类所确定的隶属度函数如图4所示,每个模糊集的隶属函数都存在着明显的不规则性和不对称性,其原因在于驾驶员对外界环境感受有所差异,并且对外界环境的反应也具有不对称性。图5为模糊推理系统与MOS测试的结果对比,该模糊推理系统与MOS的输出结果均方根误差为0.050 8,输出结果相近。
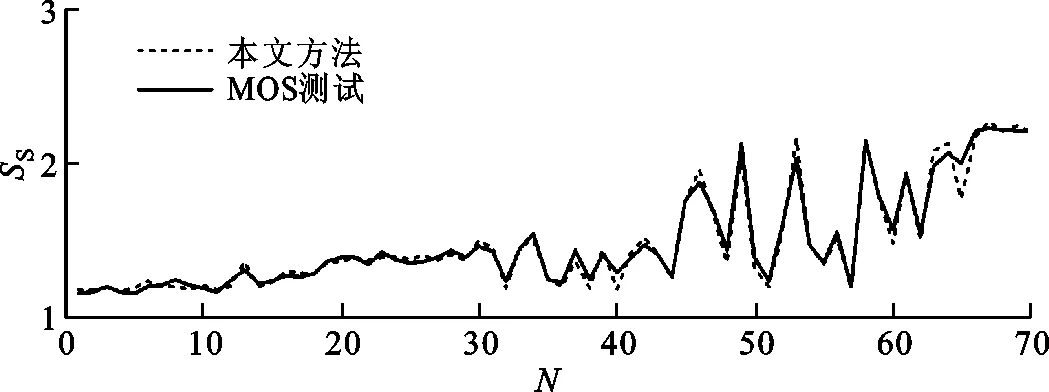
图5 模糊推理系统结果与MOS测试结果的比较
2 基于安全态势的节能控制策略
基于安全态势评估的PHEV节能控制策略首先以实际工况对关键控制参数进行优化,以增强其工况适应性,之后根据安全态势对电机转矩进行修正,以避免出现较大的加速并增加制动能量回收,从而提高行驶安全性,并进一步提高整车经济性。
2.1 关键控制参数优化
文中以某单轴并联式PHEV为研究对象,其系统结构和主要技术参数分别如图6和表3所示,其控制策略基于电池荷电状态(SOC)分为电量消耗(CD)阶段和电量维持(CS)阶段,如表4所示。本文首先利用某城市实际行驶工况(见图7)以整车综合
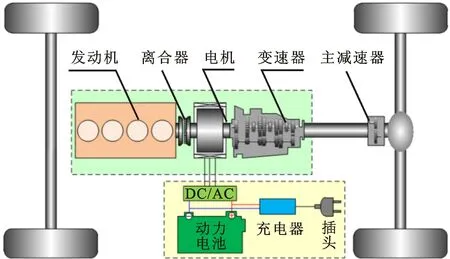
图6 单轴并联式PHEV结构简图
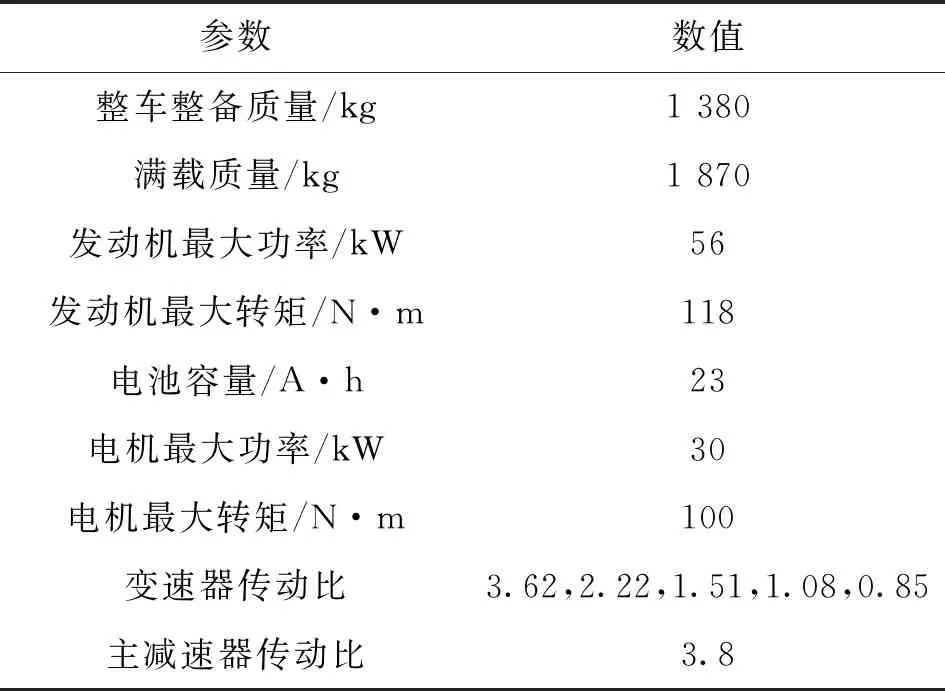
表3 整车主要参数表
能耗为优化目标,以整车动力性为约束条件,以与能耗关系密切的关键控制参数为优化变量进行优化[18]。
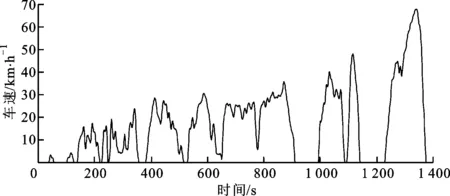
图7 某城市实际行驶工况
整车综合性能优化模型为
(11)

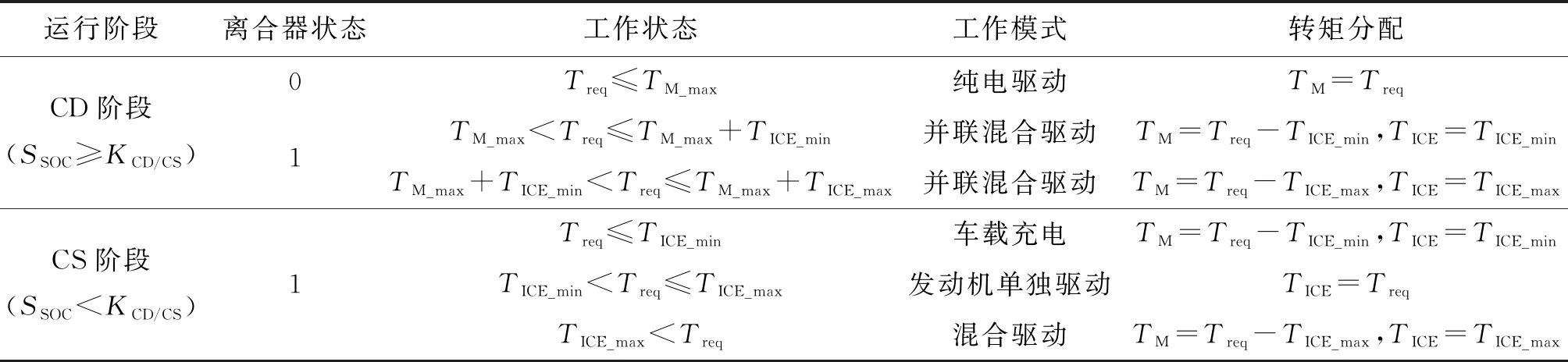
表4 整车转矩分配方式
注:SSOC为当前动力电池的SOC;KCD/CS为CD/CS模式切换系数;离合器状态中0表示断开,1表示接合;Treq为当前需求转矩;TM_max为当前电机最大输出转矩;TICE_min、TICE_max分别为当前发动机的最小和最大输出转矩;TM、TICE分别为分配给电机和发动机的转矩。
优化的关键控制参数包括CD与CS阶段的模式切换系数KCD/CS,动力电池SOC的上、下限SSOC,H、SSOC,L,CD和CS阶段离合器的结合车速VCD、VCS以及发动机工作转矩上、下限修正系数EH、EL;动力性约束条件包括以20 km/h速度行驶时的最大爬坡度不小于30%,0到50 km/h的加速时间不大于5 s,0到100 km/h的加速时间不大于14 s,实际车速与期望车速差值的绝对值不大于3 km/h。优化算法选择由MIGA和NLPQL组成的组合优化算法,优化前期充分发挥MIGA的全局搜索能力,优化后期借助NLPQL快速定位至最优区域,从而实现全局快速寻优,改善优化质量[19]。借助Isight优化平台(如图8所示)分别以新标欧洲循环测试(NEDC)工况、联邦城市运行(FUDS)工况和实际工况对关键控制参数进行优化,结果如表5所示。
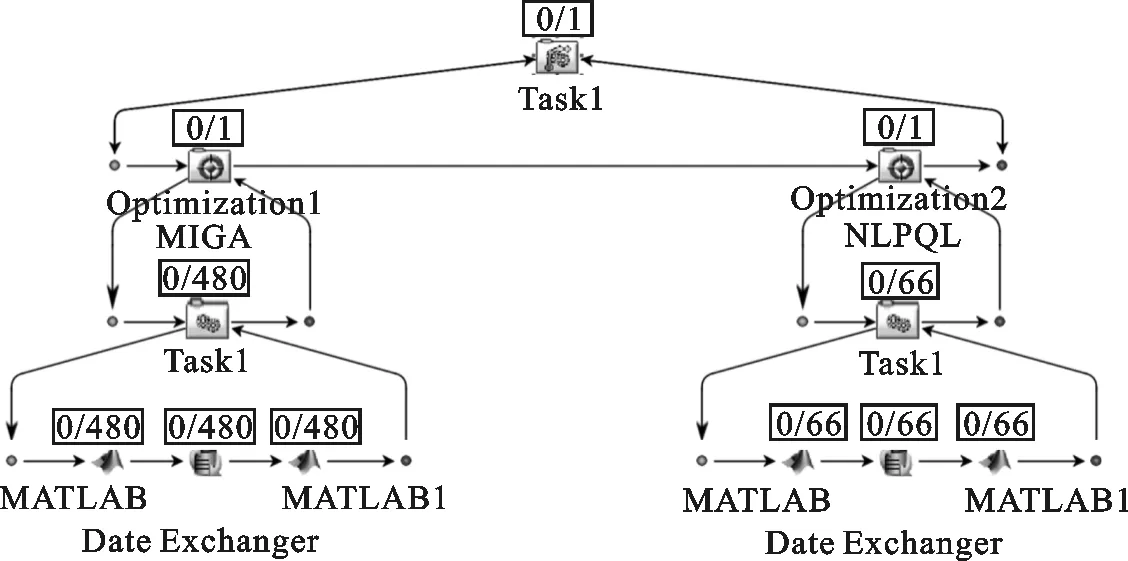
图8 Isight组合优化平台
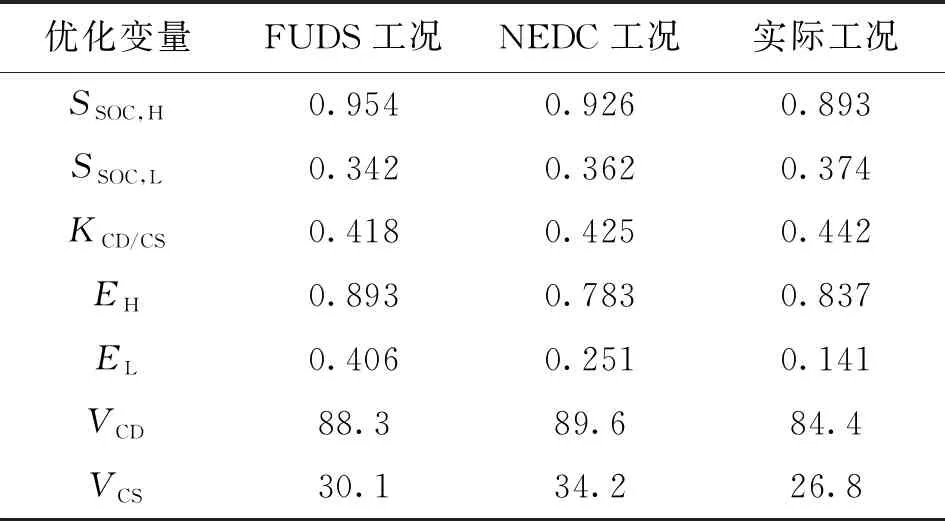
优化变量FUDS工况NEDC工况实际工况SSOC,H0.9540.9260.893SSOC,L0.3420.3620.374KCD/CS0.4180.4250.442EH0.8930.7830.837EL0.4060.2510.141VCD88.389.684.4VCS30.134.226.8
2.2 电机转矩修正
根据安全态势量化值划分了4种工作模式,通过在不同模式对电机转矩进行不同程度的修正,以实现安全性与经济性双重效果提高,修正方式如下。
(1)自由行驶模式(工作模式1)。当处于自由行驶模式时,不需要考虑前车对自车安全性的影响,因此不对电机的输出转矩进行修正,仅输出原始输出转矩,即
TFD=TM
(12)
式中TM为以实际工况优化后的电机输出转矩。
(2)平稳跟随模式(工作模式2)。当处于平稳跟随模式时,为了避免出现较大的加速度,需要对电机的最大驱动转矩进行限制,同时根据制动意图,增大电机的制动转矩,以获得更多的制动能量回收,即
(13)
式中:TM_max和TM_min分别为电机的最大驱动转矩和最大制动转矩;KD1和KB1分别为平稳跟随模式的驱动转矩和制动转矩的修正系数,其中KD1随着安全态势的增大而减小,用于反映不同安全态势下对驱动转矩限制的不同程度;KB1随着安全态势的增大而增大,以提高制动能量回收。
(3)潜在危险模式(工作模式3)。当处于潜在危险模式时,不仅要避免出现较大的加速度,还要避免急加速的情况发生,也就是说既要限制电机的驱动转矩,还要限制驱动转矩的变化率。同时根据制动意图,增大电机的制动转矩,以获得更多的制动能量回收,即
(14)
式中:KD2和KB2的定义分别与KD1和KB1类似,但KD2要比KD1略小,以增大对驱动转矩的限制程度,并且为了保证在模式切换的过程中驱动转矩无缝衔接和平滑过渡,KD2与KD1的值在模式切换临界点需相等,同样,KB2的值比KB1要略大,并且在模式切换临界点需相等;a是转矩变化率的限制参数。
(4)危险行驶模式(工作模式4)。当处于危险行驶模式时,两车间的碰撞风险较大,自车需要直接切断动力并进入制动模式,同时根据驾驶员减速意图,主动增加电机制动转矩以提高制动能量回收,即
(15)
式中:KB3为危险模式时的制动转矩修正系数,反映制动能量回收的不同程度,定义与KB1和KB2类似。
3 验证分析
为了更加准确真实地验证提出的节能控制策略,采用“虚拟环境+真实控制器+真实驾驶员+虚拟被控对象”的HIL试验方案,如图9所示,自车由驾驶员操控,前车工况预先设定,其工况是实时采集的两个校区(如图10所示)之间的实际道路工况,如图11所示,该实际道路工况全程共11.1 km,用时1 619 s。

图9 HIL试验方案示意图

图10 道路行驶路线
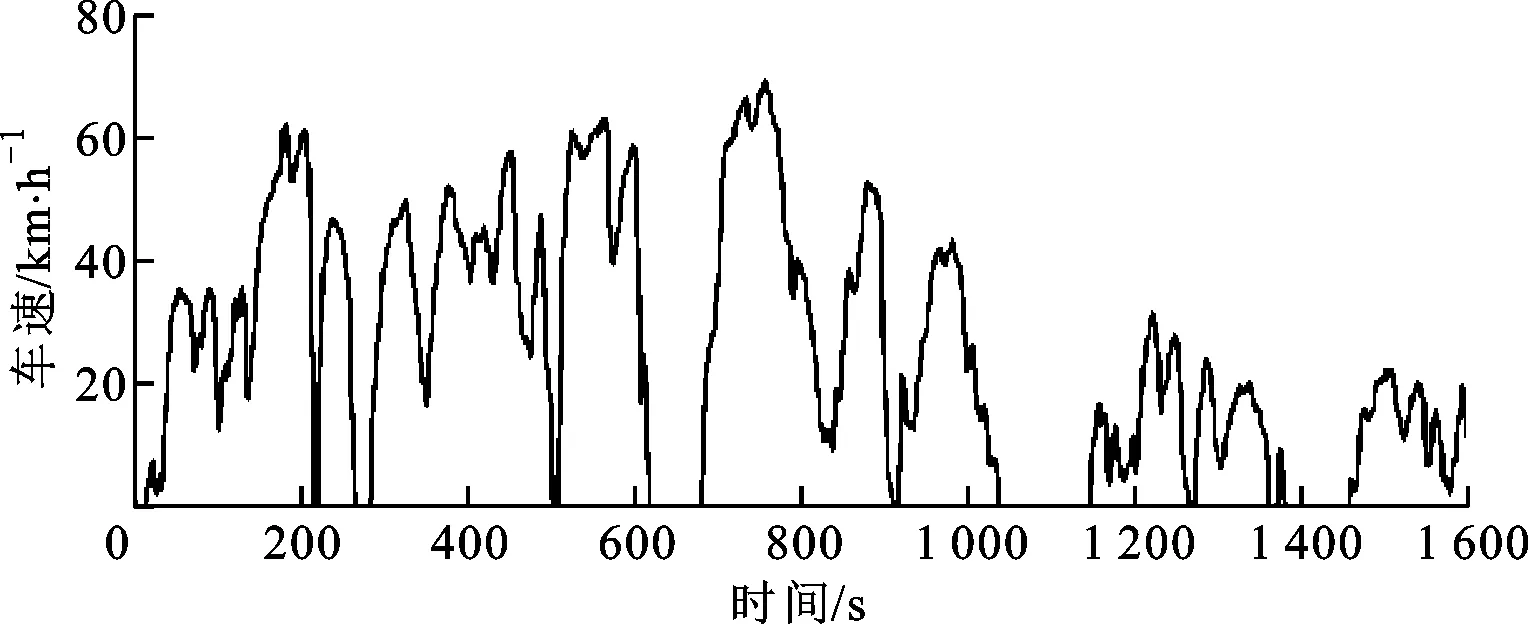
图11 实际道路行驶工况
(1)关键控制参数优化。以上述3种工况优化关键控制参数后,试验过程中动力电池的SOC变化如图12所示。其中,以实际工况优化关键控制参数后的SOC下降更为平缓,原因在于其KCD/CS较大,使得车辆较早地进入CS阶段,并且通过限制动力电池的SOC上、下限,使得SOC波动更加频繁,但仍能保持在一定的范围内,进入CS阶段后,动力电池依然具有充放电的能力,从而可充分利用电能。
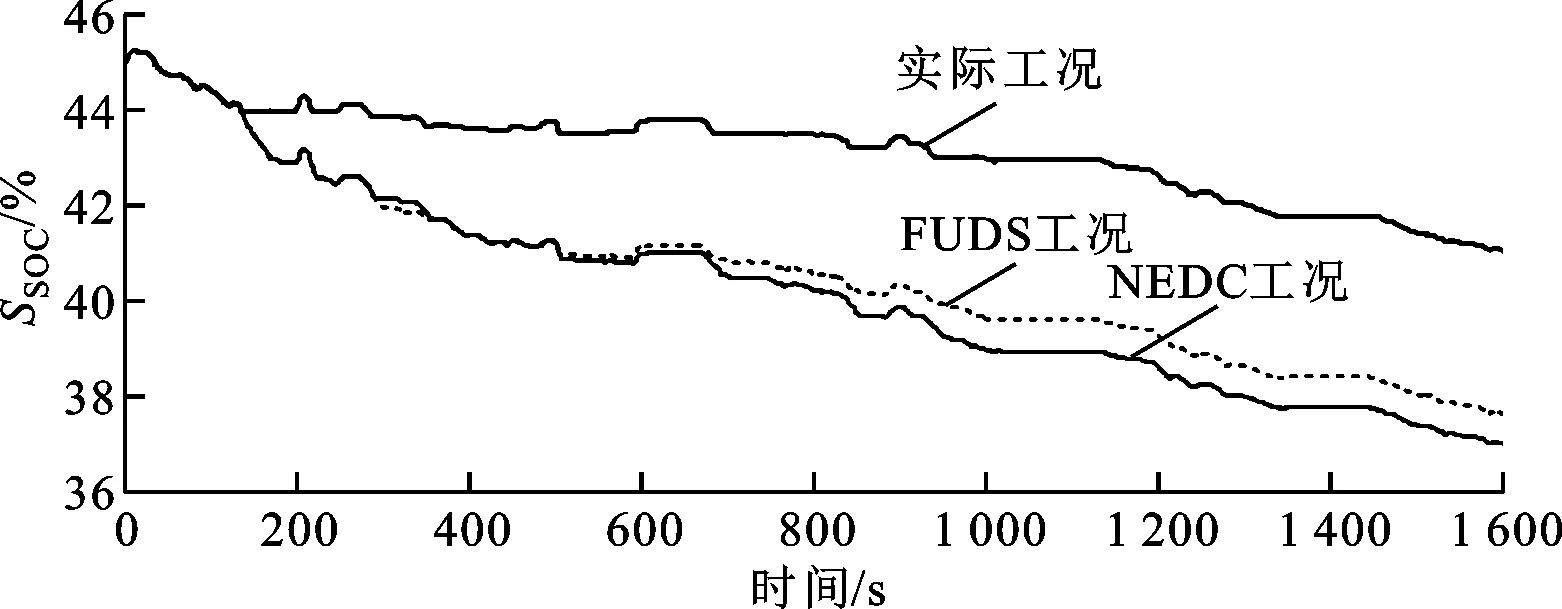
图12 关键控制参数优化后的动力电池SOC变化曲线
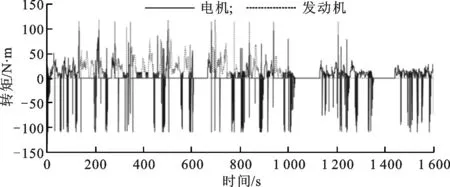
图13为以上述3种工况优化后的关键控制参数对发动机、驱动电机的转矩分配结果。其中,以实际工况优化后的关键控制参数,其离合器结合转速较小,使得发动机能够更早地介入到工作,并且通过修正发动机工作的上下限,可以有效改善发动机转矩频繁变化的状况,发动机工作在相对稳定的区域,使得其更加符合车辆的实际运行情况。
(a)实际工况
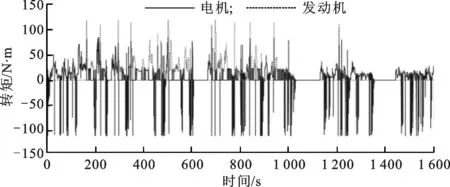
(b)FUDS工况
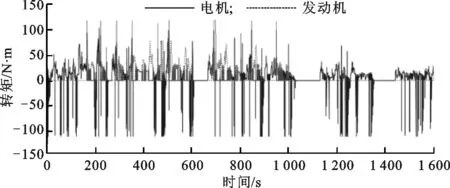
(c)NEDC工况图13 优化后的关键控制参数对转矩的分配结果
(2)电机转矩修正。图14为在以实际工况优化后的关键控制参数的基础上增加电机转矩修正的控制策略的动力电池SOC变化曲线,通过在不同的行驶情景对电机进行不同程度的驱动转矩限制或制动转矩增大,使得其SOC变化趋势更为平缓。

图14 有无电机转矩修正的控制策略的SOC变化曲线
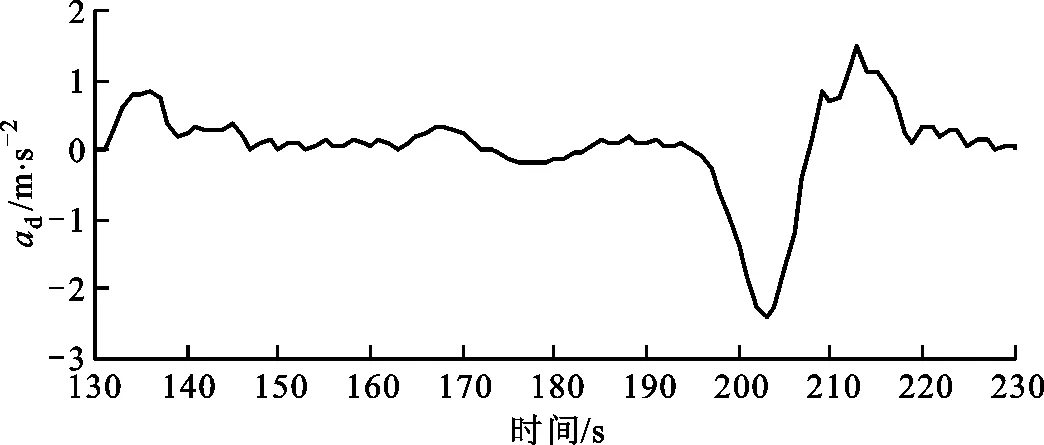
(a)期望加速度ad变化曲线
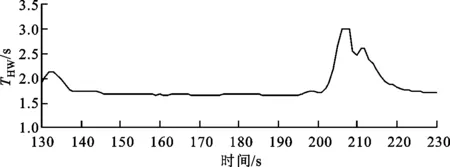
(b)车头时距THW变化曲线
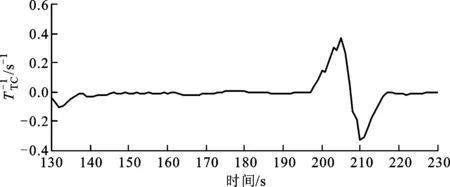
(c)碰撞时间倒数变化曲线
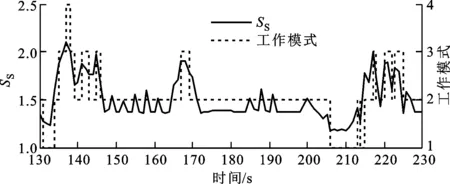
(d)安全态势评估结果及工作模式划分

(e)电机转矩修正结果
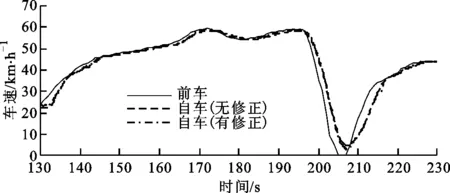
(f)车速变化曲线图15 130~230 s的安全态势评估结果和电机转矩修正结果
将试验过程中的能耗换算为百公里的能耗结果如表6所示,可以看出通过实际工况优化关键控制参数,使得文中策略较以NEDC或FUDS工况优化后的能耗分别降低了6.69%、5.7%。通过根据安全态势对电机转矩进行修正,使得文中策略较以实际工况优化后的能耗降低了2.09%,经济性得到进一步提高。

表6 试验过程中的百公里能耗对比
4 结 论
(2)利用MIGA+NLPQL的组合优化算法,分别以NEDC工况、FUDS工况和实际工况对关键控制参数进行了优化。同时依托安全态势量化值对电机转矩进行了不同程度的驱动限制或制动增大,既有效避免了较大加速度的出现,又增多了制动能量回收。
(3)HIL试验结果表明:通过实际工况优化关键控制参数,使得文中策略较以NEDC或FUDS工况优化后的能耗分别降低了6.69%、5.7%;通过根据安全态势对电机转矩修正,文中策略较以实际工况优化后的能耗进一步降低了2.09%,并且对车速控制具有一定的“削峰填谷”作用,从而可实现安全性与经济性的双重效果提高。