考虑模式切换频率的多模式混合动力汽车参数优化
2019-07-11黄康王强邱明明张怡然刘泽链耿丽珍
黄康,王强,邱明明,张怡然,刘泽链,耿丽珍
(1.合肥工业大学机械工程学院,230009,合肥;2.奇瑞汽车股份有限公司,241000,安徽芜湖)
混合动力汽车是未来新能源汽车发展的一个趋势,伴随着在此领域内的深入研究,越来越多的能量管理方法被提出[1],但是从实用性的角度来看,最基础的逻辑门限能量管理策略却得到了更为广泛的应用。从能量管理策略的角度来说,诸多新颖的能量管理策略以及优化策略实则回归到本质上是对逻辑门限能量管理策略的优化和扩展[2-6],因此从参数优化的角度来说,往往在以经济性或者动力性为目标时均是以逻辑门限能量管理策略作为基础,进行优化求解。刘永刚等以动力性为约束,通过油电转化系数以经济性为目标,利用模拟退火粒子群算法对逻辑门限能量管理策略中的几个阈值和动力部件的功率进行了优化[7];张松等采用遗传算法和粒子群算法针对经济性和尾气排放,优化了逻辑门限控制策略中的油门开度、车速等5个参数[8];Zhang等用NSGAII算法,以整合后带权重的油耗以及尾气排放为目标,优化了电机功率等参数并在ADVISOR里面进行了仿真验证[9];Xu等对一串联式混合动力汽车的电机和主减速器进行了优化,尤其强调对二者进行协同优化,并仿真验证了有效性[10];Wu等以燃油经济性为优化目标,通过粒子群算法优化CD-CS控制参数,在保证动力性能的同时优化了经济性[11]。上述研究均只单纯考虑了经济性和动力性因素,而未考虑优化参数使得车辆工作在逻辑门限的边界附近时对车辆工作的稳定性、工作模式切换的频繁性造成的影响。
本文以国家重大专项中的新型高性价比乘用车混合动力汽车为优化对象,以其在新标欧洲循环测试(NEDC)工况下的经济性、加速性能以及模式区分度为优化目标,通过多目标粒子群算法(MOPSO)对其三档传动比、电机2的单级减速器传动比以及典型逻辑门限能量管理策略中的两个阈值同时进行优化,在优先考虑动力性和经济性的优化的前提下,提出了模式区分度的概念作为优化目标函数同时对3个目标进行优化,保证了新型多模式混合动力汽车模式的稳定性,可避免其在典型工作点下频繁进行模式切换,进一步提高了车辆运行的稳定性与舒适性。
1 动力总成结构与整车参数
目前国内的汽车企业倾向于在典型的混联式混合动力构型上增加离合、锁止器等以增加动力总成的模式可选择性,以充分利用各个动力部件的高效工作区,提高整体经济性,但这无疑增加了能量管理和参数优化的难度。本文结构来源于国家重大专项PHEV项目中给定结构,动力总成结构如图1所示。该结构采用单排行星轮,发动机输出连接到了行星轮的太阳轮,并增加了锁止器B1,电机1转子直接输出到行星轮的齿圈上,离合器C1用于控制行星耦合机构(ePGS)中发动机与电机1的耦合模式,离合器C2用于控制ePGS模块同电机2耦合与否,电机2通过单级减速器输出,并增加采用了三档变速箱,利用C3和同步器进行换档控制,主要参数如表1所示。
2 逻辑门限值能量管理策略
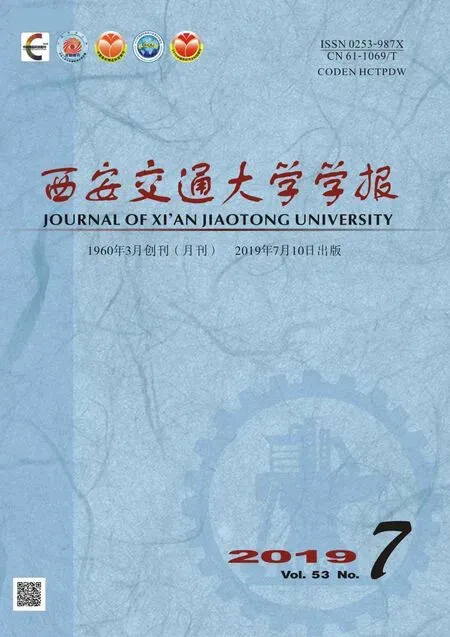
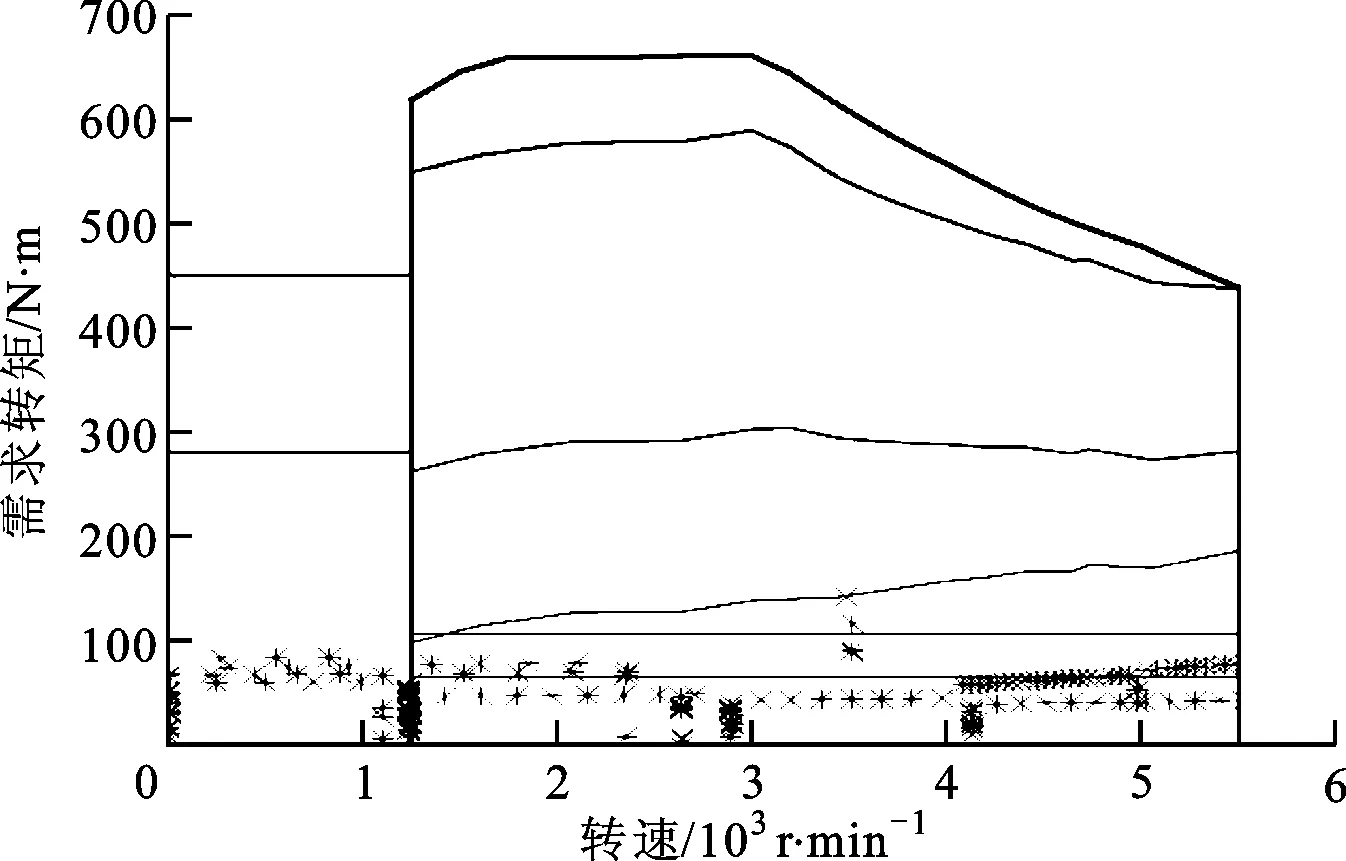
传统的基于逻辑门限的能量管理策略具有可靠性高、运算量小的特点,得到了广泛的实际应用。由于本文动力总成结构较为复杂,可选的逻辑门划分方式较多,本文根据选用动力总成构型,参考各个动力部件的高效工作区间,采用了如图2所示的逻辑门限划分方式,图中1~6分别对应于表2中模式1~6。图中横坐标为耦合轴上的转速,纵坐标为耦合后的转矩;左右分界线为发动机的怠速转速,分界线左侧1和2为纯电模式,右侧从下往上的实线依次为单电机与双电机分界线(1′和2′分界线)、发动机启动分界线(2′和3分界线)、发动机最佳工作曲线(3和4分界线)、发动机与电机1耦合分界线(3和4分界线),发动机最佳工作曲线与电机1和电机2外特性曲线耦合分界线(4和5分界线)、发动机最佳工作曲线与电机1和电机2外特性曲线耦合线(5和6分界线)、发动机外特性曲线与电机1和电机2外特性线曲线耦合线。表2为逻辑门限能量管理策略中各模式的代号及说明。

表1 整车及动力源主要参数

图2 混合动力模式能量管理策略
3 多目标粒子群优化算法
多目标的粒子群算法以Coello等在2004年提出的方法[12]最具有代表性,得到了广泛的认可。与单目标的粒子群优化算法不同的是,多目标之间相互矛盾,没有一个最优解,因此在多目标粒子群优化里面,每个粒子需要单独从保存Archive集中选择各自的全局最优点,而对于个体最优点,则通过Archive密度信息进行选择。不论是多目标优化还是单目标优化,粒子群算法更新公式为
(1)
式中:r1和r2为(0,1)内的随机数,服从平均分布;c1和c2为加速系数,通常在(0,2)内取值,c1为个体加速系数,c2为全局加速系数,分别表示粒子对个体认知和社会知识的信任程度;下标id表示第i个变量的个体极值的第d维;下标gd表示全局最优解的第d维。
3.1 目标函数
本文选取了传统的经济性和动力性作为优化目标,并提出了区分度的概念,作为第3个优化目标。
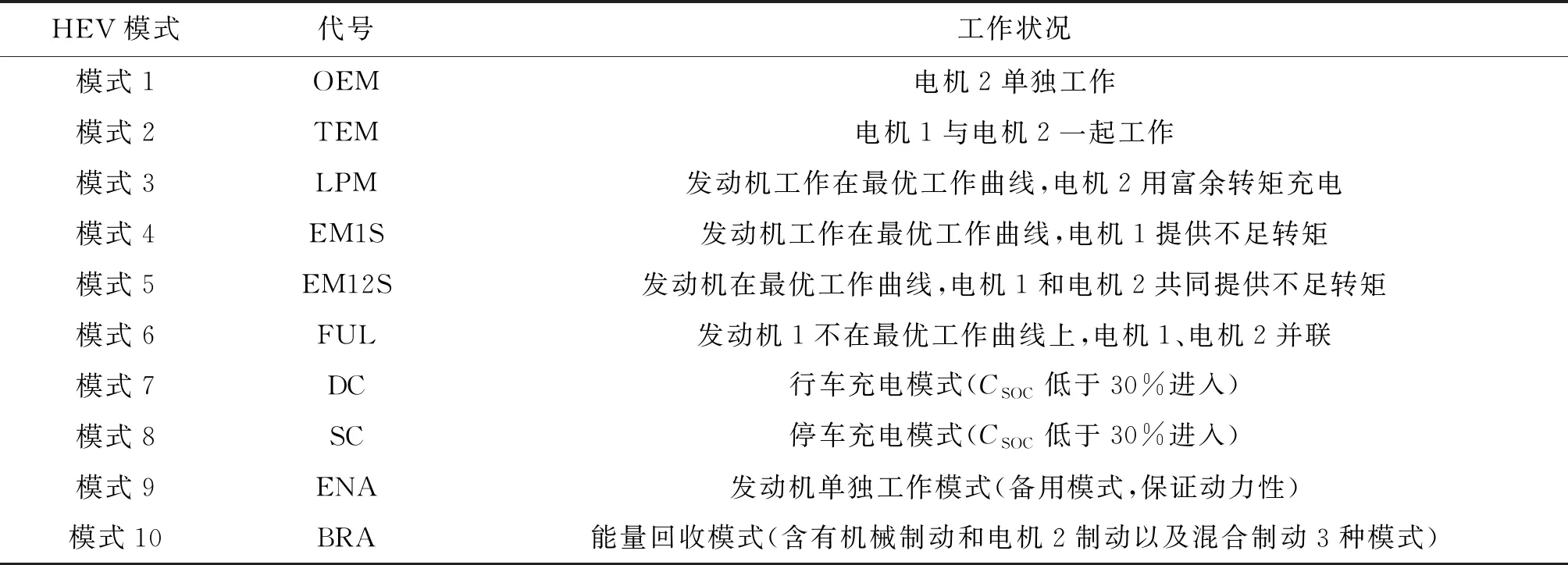
表2 逻辑门限能量管理策略
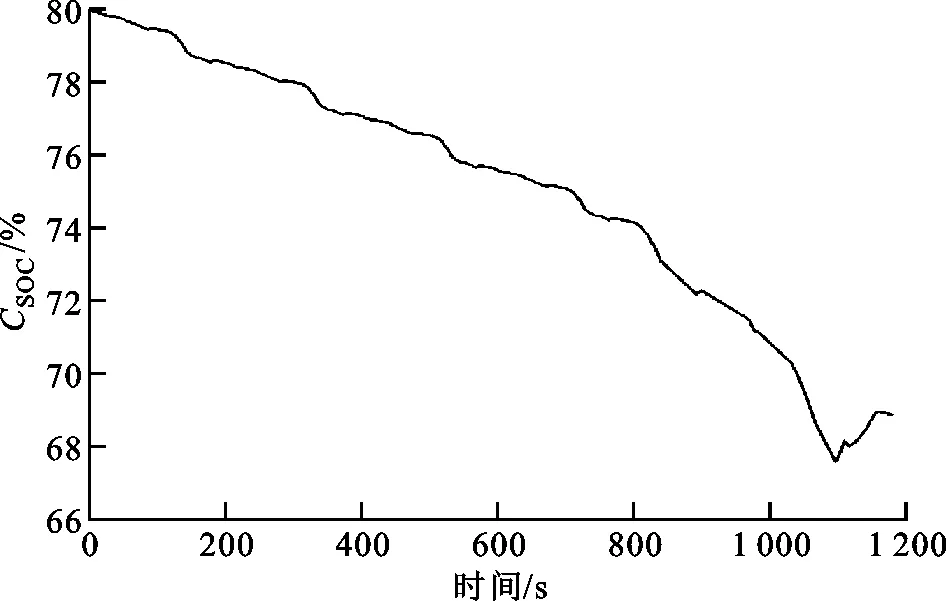
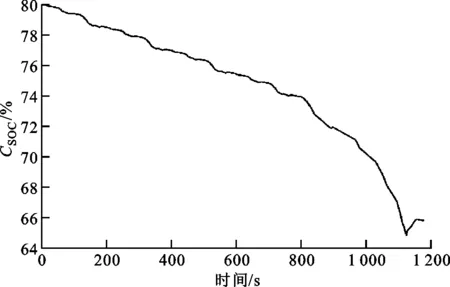
注:CSOC表示电池荷电状态(SOC)。
(1)经济性目标函数。本文不以油电转化系数将油耗转化为电耗,或者电耗转化为油耗进行代换,这种方法实际在不考虑温度对电池的影响的情况下,也只是一个常系数而已,因而本文直观利用当前的电价和油价来设定经济性目标的适应度函数如下
f1=pfff+pefe
(2)
式中:pf为油价,取6.75元/L,pe为电价,取0.565 3元/(kW·h);ff为一个NEDC循环下的燃油消耗量;fe为一个NEDC循环下的电量消耗。所涉及的优化参数有3档传动比。
(2)动力性目标函数。由于采用了3档变速箱,并且要求100 km/h前只换一次档,不适合以百公里加速时间作为优化的适应度函数,在此选取了从0到设计极速(170 km/h)的加速时间作为优化的目标函数。
(3)模式区分度目标函数。文献[13-15]中分别采用了PID、模糊等方法,通过电机补偿,对离合器的转速和电机转速,以及发动机油门开度进行PID控制,来解决在车辆运行中模式切换时存在的问题,文献[13]的结果表明模式切换的平顺性是动力性和舒适性的一对矛盾解,即若要增加舒适性,则会牺牲一部分动力性;若要保证动力性,则模式切换的冲击会更大。也有通过模糊的方法来解决模式与模式之间的边界问题,但这些方法都为对边界点可能出现的位置进行优化,不能解决工作在模式与模式分界点时造成的模式频繁切换问题,因此本文针对这个问题,提出了模式与模式之间区分度的概念,即期望通过对结构参数和逻辑门控制参数的优化,使得模式的典型工作点远离模式与模式的边界,即典型的工作区间不应该出现在模式的边界上。尤其针对本文涉及的这种多模式的混合动力汽车,由于模式较多,模式边界也更为复杂,由此本文提出了第3个目标函数。
本文选取了NEDC工况作该车的典型工作工况,将其在逻辑门策略中的工作位置视作典型的工作点。根据汽车理论,行驶阻力的定义为
积极推进重大战略研究及前期工作。邀请知名院士专家赴黄土高原地区考察,深入研究黄河水沙情势变化规律。组织人员实地查勘南水北调西线工程社会环境等因素,对南水北调西线一期工程项目建议书进行补充完善。加快古贤水利枢纽立项进程,完成其环境影响评价专题报告并上报水利部。深入开展黄河下游河道改造与滩区治理研究,深化黑山峡河段开发论证。完成黄河东平湖蓄滞洪区治理与沁河下游河道治理工程可研报告并通过水利部审查。经过9年的不懈努力,黄藏寺水利枢纽项目建议书获得国家发改委批复,在完善黑河水量调度工程措施上迈出可喜一步。
(3)
式中:G为汽车的重力;f为滚动阻力系数;i为道路坡度;CD为空气阻力系数;A为迎风面积;ua为行驶速度;δ为汽车旋转质量换算系数。
通过式(4)得到需求转矩为
(4)
式中:ig为当前档位传动比;i0为主减传动比;r为车轮半径。
通过式(5)得到当前的需求转速为
(5)
根据需求转矩和转速就可以在图6中得到对应的逻辑门的工作点,为了使得工作点离模式的边界尽可能远,设定了如下区分度目标函数
(6)
式中:Ti为实际转矩;Tk和Tk′分别为所在区域的边界值;负号是因为需要求最大值,做了取负处理;n为NEDC工况的采样点,本文采样间隔取为1 s,n即为1 180;ωj为对应模式边界的权重系数。具体来说,希望尽可能避免工作在模式2和模式3的边界附近,因为此处需要启动发动机,又要求最大值,经过多次调整,选取权重系数为0.9,同理模式5与模式6之间的边界也选取权重系数为0.9,因为此处涉及到离合器C1的变换,其余的权重系数取1。注意到,对于低速区的纯电模式向高速区过渡的边界同样涉及到发动机启动,在观察NEDC工作点分布后,工作点实际为从低速区向高速区的单方向跨越,优化此速度分界线对结果的影响不大,故略去对此处的考虑。
3.2 优化参数和约束函数
选取3档传动比分别对应的ig1、ig2、ig3,主减速器传动比igf,电机2的单级减速器的传动比ige,以及模式1与模式2的分界线的设定参数k1,模式2与模式3的分界线参数k2共7个参数作为优化参数,即有
(7)
(8)
根据最大爬坡要求,可以得到最大传动比约束条件,即有
(9)
根据等比数列偏置,得到约束条件
(10)
并由100 km/h前换一次档得到二档约束条件
(11)
两个模式分界线的约束条件k1、k2的取值范围由在5 500 r·min-1时的电机转矩进行确定,根据设计由模式2进入模式3时,希望由两个电机提供转矩启动发动机,以增加模式切换的平顺性,若采用电机2单独工作,电机1单独启动发动机,从模式2向模式3切换时,需要闭合离合器C2,会造成冲击,因此考虑将行星轮的行星架和齿圈作为输入,发动机启动转矩作为负载,利用两个电机启动发动机。根据行星轮的转矩特性,即有
Tr∶Tr∶Tr=1∶α∶-(1+α)
(12)
需要电机保留富余的转矩,进而得到k1、k2的约束条件,最终选定优化参数范围如表3所示。
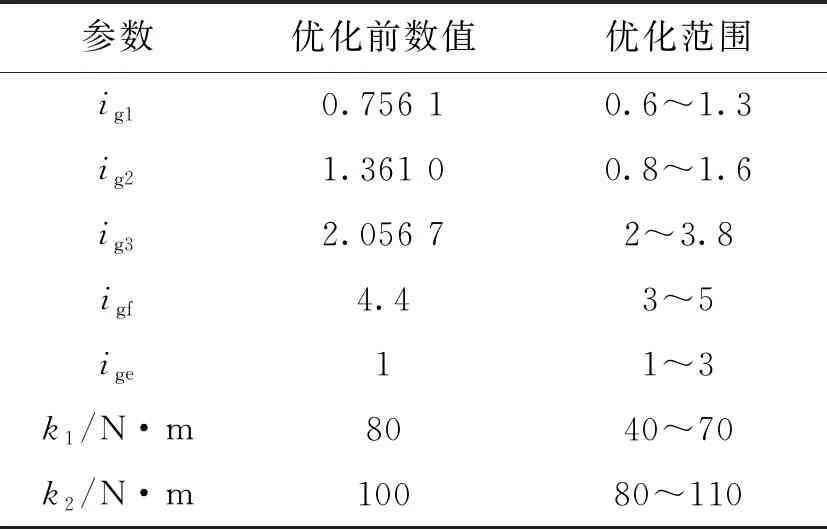
表3 优化参数范围
3.3 车辆模型以及控制策略模型
AVLCruise软件作为一款常用的车辆仿真软件,建模方法和模块化的建模手段使得不同项目组可以对模型进行方便快捷的整合,并快速搭建各种复杂的动力传动系统模型,同时进行正向或逆向仿真分析。本文通过Cruise建立整车模型,利用Interface接口在Simulink搭建控制策略进行联合仿真,Cruise的整车模型如图3所示,控制策略模型如图4所示。
图3 Cruise整车模型
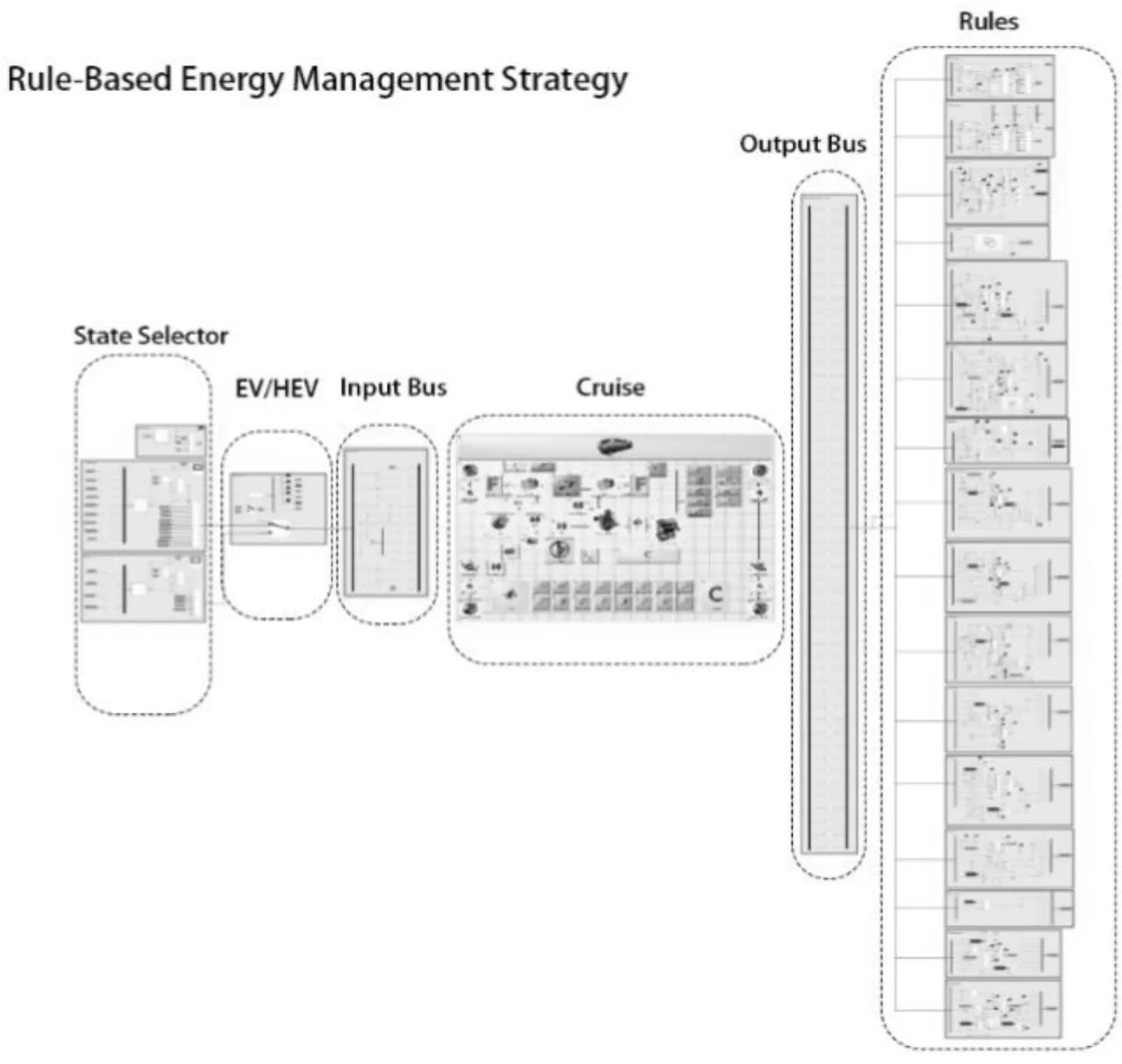
图4 Simulink控制模型
4 优化结果与仿真分析
根据本次优化的目标和参数,优化的数学模型如下
(13)
根据计算精度需求,本文选取了50个粒子,选择初始ω值为0.9,并给予一个每次迭代的衰减值0.99,这样能保证在60次迭代的时候ω为0.45,即能保证初始的搜索速度和后期的搜索精度。个体加速系数c1设置为1,全局加速系数c2设置为2,进行60次迭代得到的优化结果如图5所示。图5a中的点均为可行解,近似分布在拟合曲面上。
单从动力性和经济性的角度看,这个分布和传统的双目标优化的解的分布方式是一致的,即表现为一对明显的矛盾解,表明优化结果正确继承了双目标优化的结果,但是同时还受到了区分度的有效约束。
由于这些解均为可行解,但本文考虑到动力性不宜太差,区分度良好,要求在280 N·m以上,经济性有尽量好的倾向,故选取了3组解,并对3组可行解在搭建好的Simulink和Cruise平台上进行了仿真,仿真结果如图6~8所示。
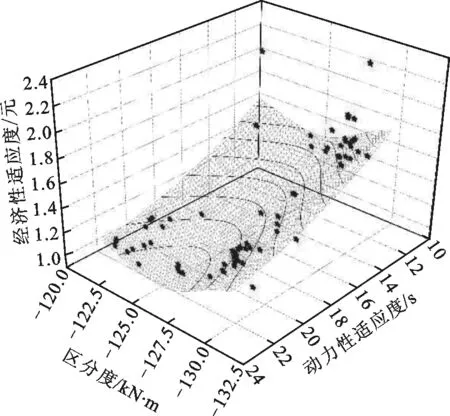
(a)粒子群优化结果三维图
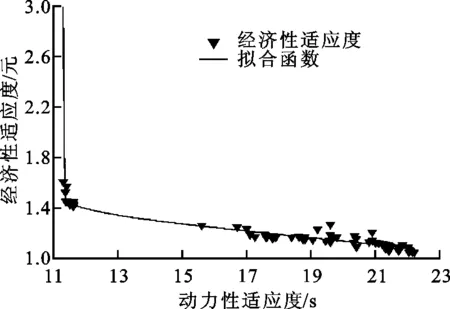
(b)动力性与经济性适应度的关联性图5 粒子群优化结果
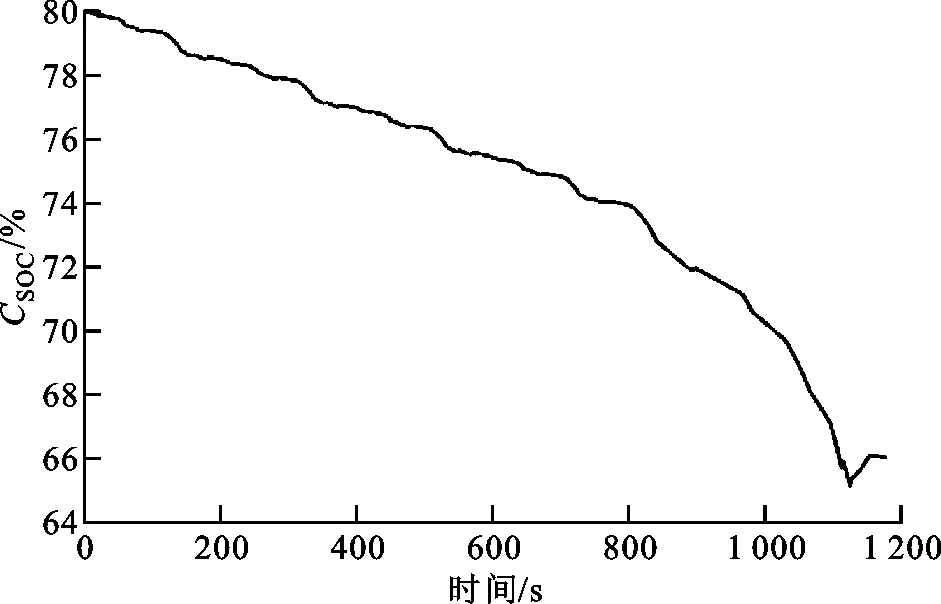
(a)SOC变化曲线
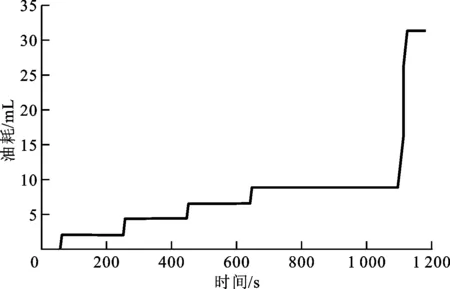
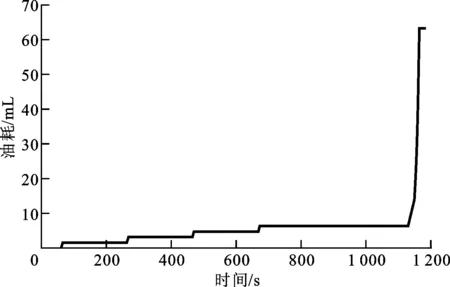
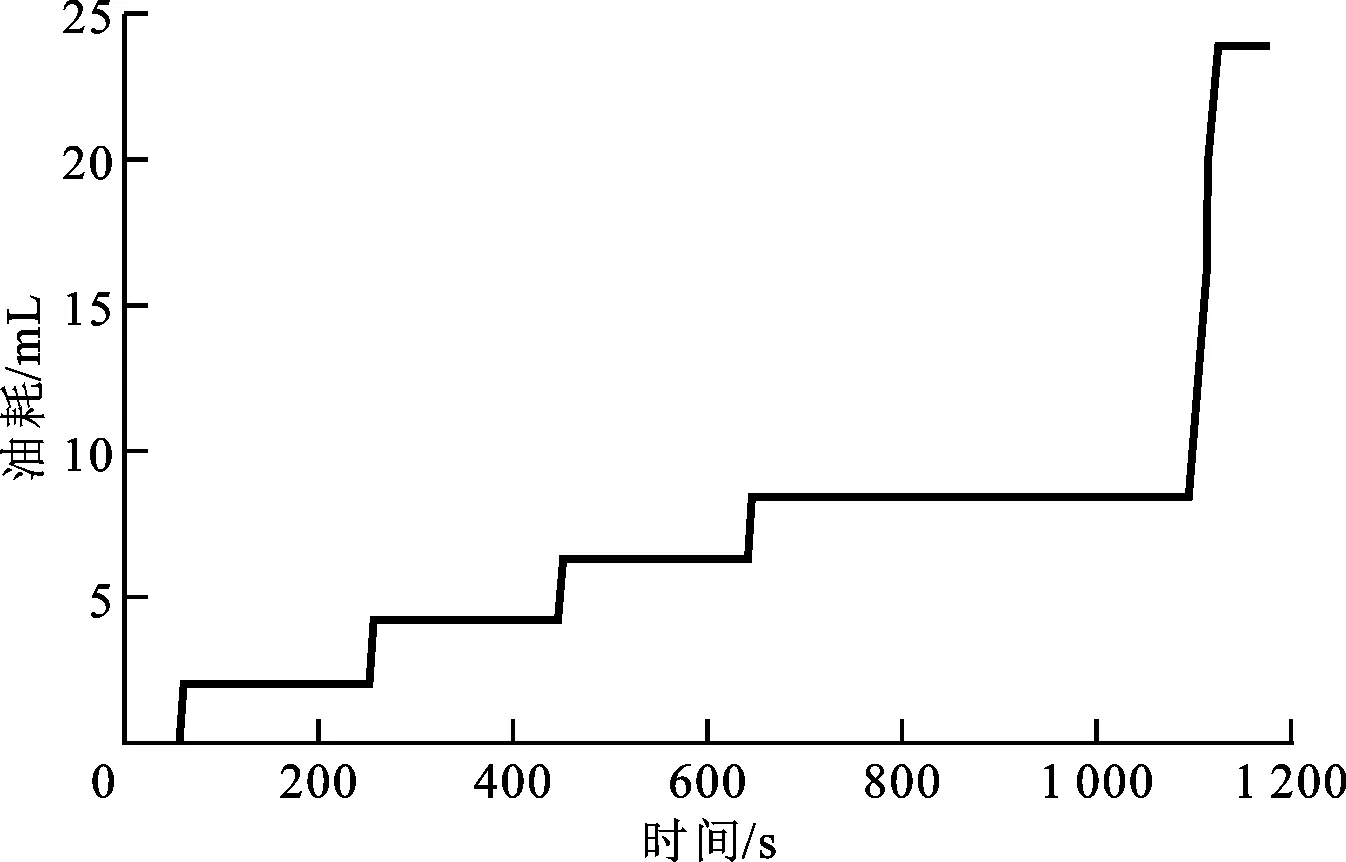
(b)油耗曲线
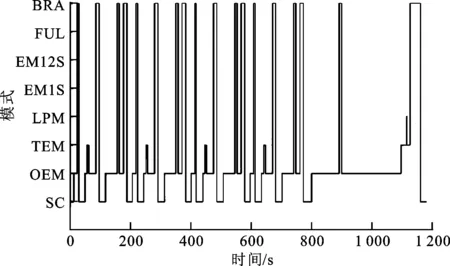
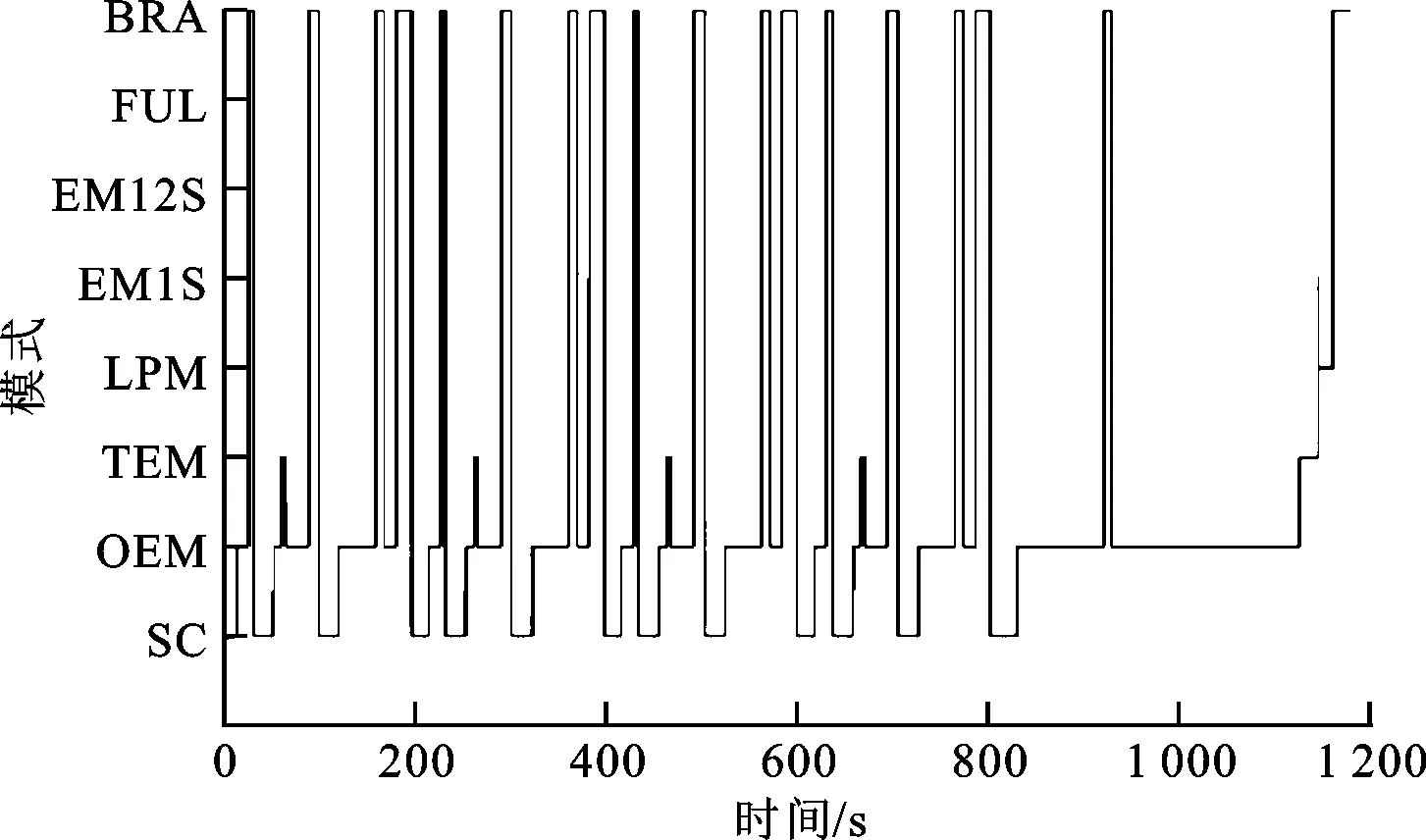
(c)模式变化图
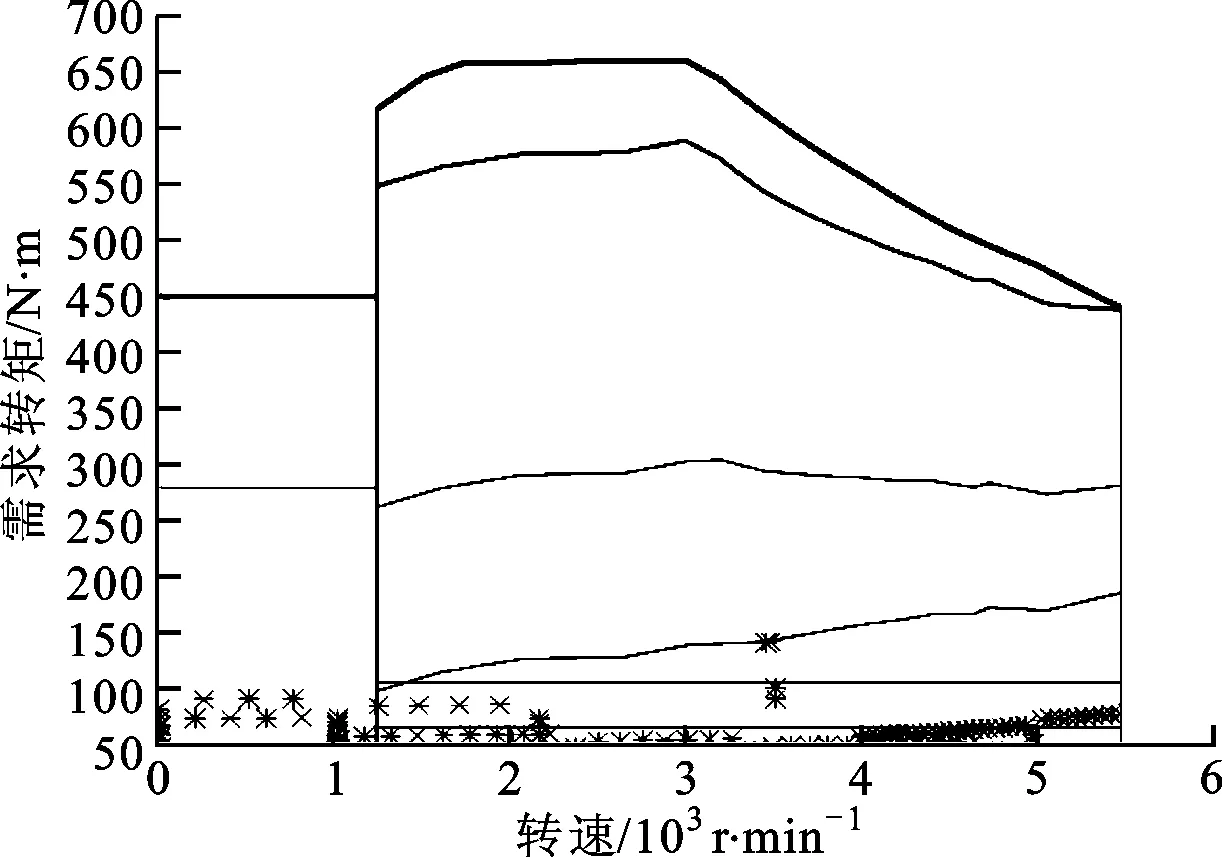
(d)工作点分布图ig1=1.281 1;ig2=2.177 8;ig3=2.966 5;igf=3.044 3;ige=1;k1=70 N·m;k2=108.14 N·m图6 解1仿真结果
(a)SOC变化曲线
(b)油耗曲线
(c)模式变化图

(d)工作点分布图ig1=1.3;ig2=2.21;ig3=3.666 7;igf=3;ige=1.51;k1=70 N·m;k2=88.412 7 N·m图7 解2仿真结果
(a)SOC变化曲线
(b)油耗曲线

(c)模式变化图
(d)工作点分布图ig1=0.524 5;ig2=0.891 6;ig3=2.508 1;igf=4.385 1;ige=2.987 6;k1=66.59 N·m;k2=106.89 N·m图8 解3仿真结果
由图6~8可知,从0到170 km/h,解1的加速时间为11.625 4 s,经济性适应度为1.445元,解2的加速时间为11.616 6 s,经济性适应度为1.607 1元,解3的加速时间为21.435 4 s,经济性适应度为1.055 9元。
注意到大多数工作点都在转矩较低的范围内,这是因为本车设计之初对百公里加速进行了要求,所选电机功率较大,而在NEDC工况内所选电机的性能并不完全发挥。另外注意到,在图8c中虚线圈出的区域,模式从OEM→EM1S→LPM→OEM,在较短的时间(约5 s)内进行了切换,而在解1中也存在这一现象,但是模式并没有调到EM1S,只是进入了LPM以提供短时间加速的动力性需求,这就是本文引入区分度概念的原因,控制传动比参数和2个阈值,实际上是控制了工作点在逻辑门控制策略中的位置,以防止频繁地工作在边界上造成频繁的模式切换。同时,本文也继承了传统优化思路,保证了燃油经济性和整车的动力性能,其中解3仅因为说明区分度作用而给出,故不作对比,其余两解与原结果对比的结果如表4所示。
为了验证这套优化理论的通用性,本文利用JC08工况进行了仿真验证,仿真结果如图9~图12所示。

表4 优化结果对比
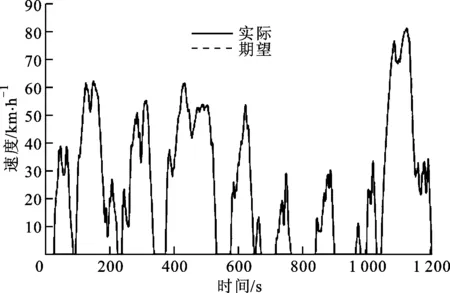
图9 JC08工况解1速度跟踪
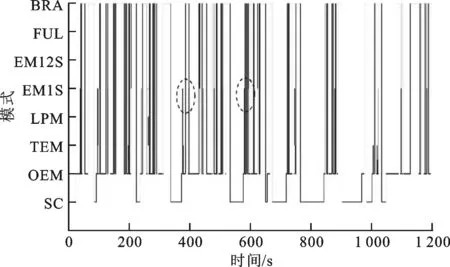
图10 JC08工况解1模式选择
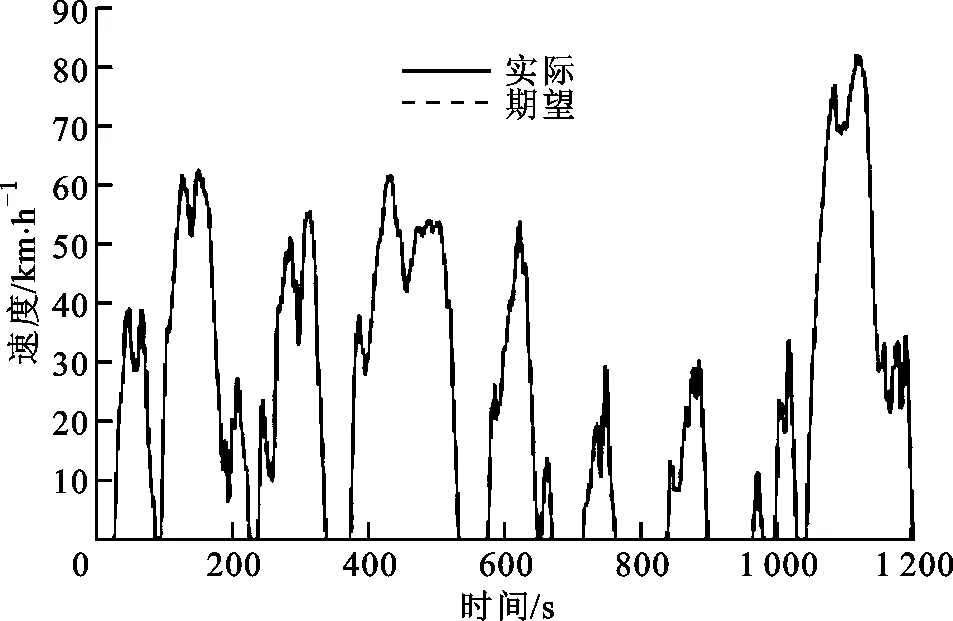
图11 JC08工况解2速度跟踪
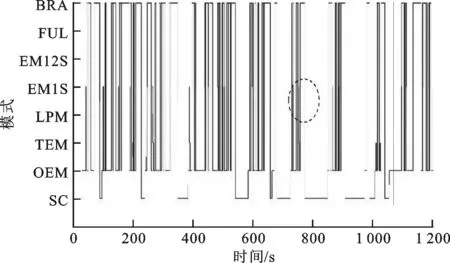
图12 JC08工况解2模式选择
从图9~图12中可以看出,JC08工况的启停、加减速更为频繁,循环的规律性更差,对车辆要求更高,但是在该优化参数和控制策略下仍能保证较好的速度跟踪。从模式选择图可以看出,车辆的加减速频繁,有部分文献中指出,出于对电池寿命的考虑,不应使得电池在频繁充电和放电之间转换。因此,本文对所采用的制动模式进行了限制,在频繁的低减速度下采用机械制动,为了方便表达,制动模式都放在了BRA内,故在JC08工况复杂的加减速环境下,虽然可以观察到频繁进入BRA,但是电机2并不会频繁进行充放电。从图9~图12还可看出,控制策略均能良好跟踪,模式基本保持稳定,虚线圆圈处表示为模式快速切换的位置,主要存在于JC08工况的冷启动阶段及高速阶段,造成了速度跟踪出现误差,另外速度跟踪误差还出现在瞬态阶段,其余模式选择均正确而且稳定,证明优化结果在JC08工况下仍能较好适用。这表明额外选取区分度作为优化的适应度函数的方法具有通用性,其结果也具有一定的通用性。
5 结 论
本文根据现有的结构,参考各个动力部件的经济区,制定了基于规则的能量管理策略,并利用Cruise和Simulink搭建了整车模型以及控制策略模型。在以经济性和动力性为目标的基础上,进一步提出了模式区分度的概念,定义并转换为了第3个优化目标,以现有结构中的5个传动比以及2个逻辑门阈值为优化参数,利用多目标粒子群算法进行优化,得到了Pareto非劣解集。选取并通过Cruise和Simulink平台验证了所选的3组解,其中2组解结果表明该方法能很好地降低燃油经济性,保证动力性,同时规避了典型工作区间下频繁模式切换的问题,车辆的稳定性和舒适性得到了提高。通过JC08这个较NEDC更为复杂的工况对所选两组解进行了仿真验证,结果表明,在该工况下车辆的运行稳定,并能实现速度的跟踪,说明该优化方法具有良好的通用性。