光纤预警系统在清管器轨迹监测中的应用
2019-07-05苟武侯张路李国相
苟武侯,张路,李国相
(1. 北京航天易联科技发展有限公司,北京100176;2. 中国石化销售华中分公司,湖北武汉430070)
随着管道运输业的迅速发展,管道传输距离不断增加,为了确保管道的清洁,降低腐蚀性物质对管道内壁的腐蚀损伤,石油、天然气等输送管道需要定期清洁及维护[1],所以清管器的工作状态、实时定位监测是管道管理部门非常重视的内容。由于管道清理过程中出现的清管器故障、卡阻等现象直接影响管道的安全运行,必须及时定位事故点并采取必要的应急措施,因此对清管器移动轨迹的监测具有重要的实际意义[2-5]。
常见的清管器跟踪定位技术包括声波检测法、电磁感应法、放射性同位素法、机械法、压力脉冲法等[6-9],但常规的定位方法在实时定位和定位精度等问题上存在一定难度。本文介绍的光纤预警系统在清管器实时监测中的应用,实现了清管器工作过程中的实时定位与轨迹跟踪。光纤预警技术已经逐步成熟[10-14],在长距离油气管道监测中的安全防护作用显著,同时降低了人工、管道安全维护及能源运输成本[15-17]。
文中列举的管道清管器在固定的时间间隔内对管道疏通清洁[18],以保障输油的通畅,常见的清管器外形如图1所示。

图1 常见的清管器外形示意
1 光纤预警系统原理
光纤预警系统主要由分布式光纤传感器、光源及数据采集模块、数据处理计算机等组成,系统结构如图2所示[19-21]。清管器在管道内工作时会产生一定幅度振动信号,该振动信号可以被同沟敷设在管道附近的分布式光纤传感器捕捉,采集的信号经光源及数据采集模块处理后上传至数据处理计算机,由计算机对采集的信号做进一步的检测、识别、处理,实现了对清管器的实时监测。
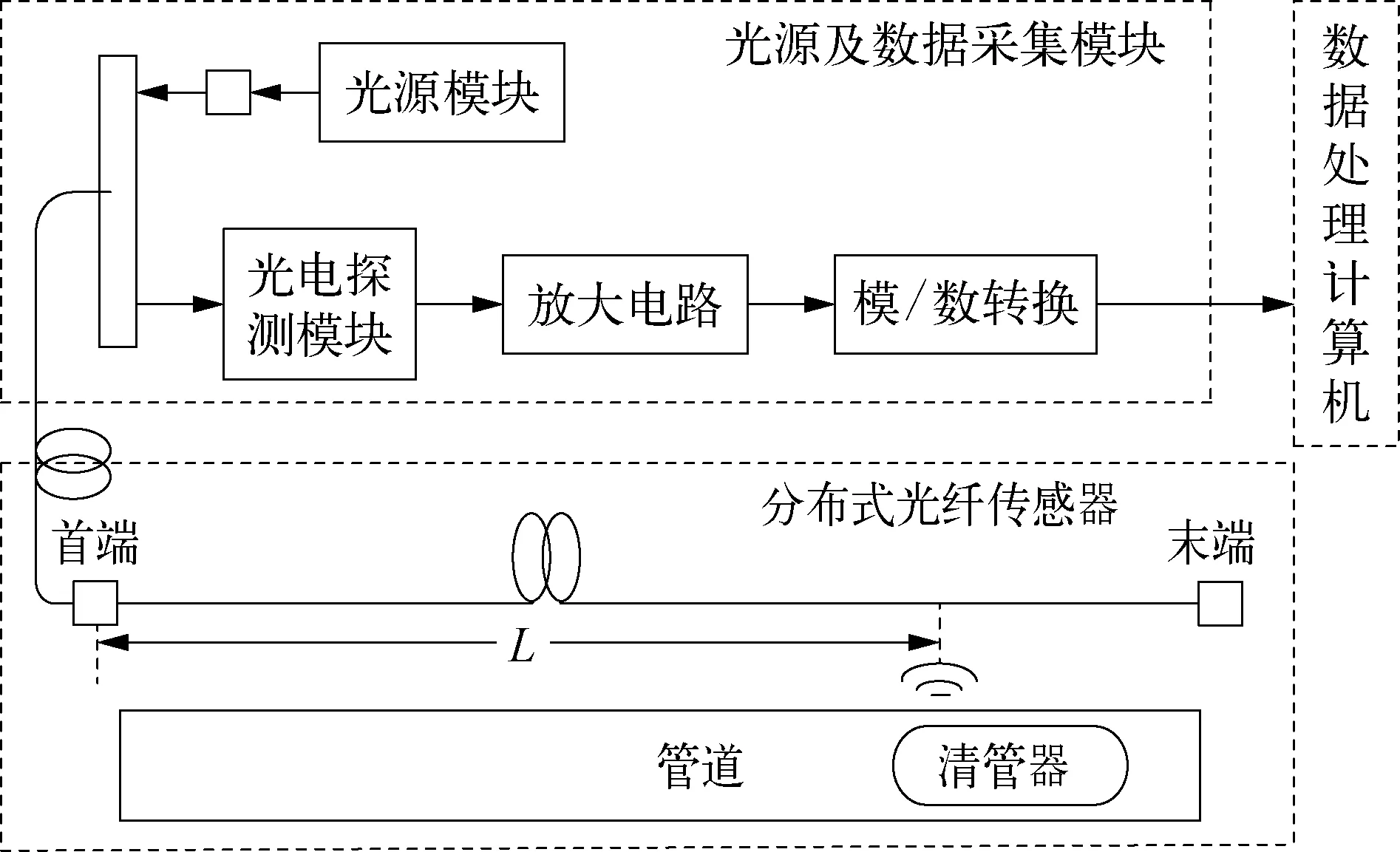
图2 光纤预警系统结构示意
1.1 定位原理
光纤预警系统基于背向瑞利散射原理,由光源模块持续将光脉冲注入分布式光纤传感器的首端,通过光电探测模块探测返回首端的瑞利散射光,当清管器在某个位置发生振动时,分布式光纤传感器对应位置的折射率发生变化,使该处光相位发生偏移,由于干涉作用,相位的偏移将引起背向瑞利散射光光强发生变化。
通过光电探测模块探测返回首端的瑞利散射光,经放大电路及模/数转换模块,将模拟信号转换为数字信号后,上传至数据处理计算机内对信号做进一步的处理。系统光脉冲重复频率为1 kHz,采集卡采集频率为20 MHz,采集到的振动信号为32位浮点数据,通过预处理提取每秒的数据信号特征。
1.2 定位距离的计算
图2中清管器产生的振动作用在分布式光纤传感器上,由于干涉作用,会对背向瑞利散射光的光强进行调制,通过记录光脉冲发射和接收到振动的时间差,可以实现清管器位置的定位,光纤预警系统的定位距离可以由式(1)求得:
L=ΔTv/2
(1)
式中: ΔT——光脉冲发射和接收到振动信号的时间差,s;v——光在光纤中的速度,v=c/λ;c——光在真空中的速度,m/s;λ——光纤折射率。
采集卡采集到的背向瑞利散射光的强度IB如式(2)所示[22]:
IB=I0Fvαsτ{1+cos[Φ+Bf(t)]}
(2)
式中:I0——光纤首端注入的光脉冲强度;F——散射光返回入射方向的比例;аs——瑞利散射系数;τ——发射光的光脉冲时间宽度,μs;Ф——光脉冲上升沿与下降沿的相位差;B——干扰系数;f(t)——外界振动干扰。
由式(2)可知,IB与f(t)具有直接关系,因此通过相关处理可以实现清管器探测及准确定位。
2 光纤预警系统清管器轨迹监测效果验证
2.1 清管器监测实例
本文以华中某区域A站至B站的光纤预警系统监测数据为基础,介绍监控区域输油管道内清管器工作轨迹监测案例。在A站和B站各部署了1套光纤预警系统,监测A站至B站的管道。
2018年7月9日,A站工作人员在管道出站首端投放1台清管器,对管道实施清洁作业;在B站管辖范围沿线设置了多个人工监测点,用于监测清管器经过的时间及准确位置;同时工作人员通过光纤预警系统跟踪定位清管器的移动轨迹,对比分析光纤预警系统对清管器的定位误差。
B站工作人员从2018年7月10日0时起开始监测清管器的位置信息,在6个固定跟踪点对清管器进行监测,工作人员监测的位置信息与光纤预警系统监测到的位置信息见表1所列。
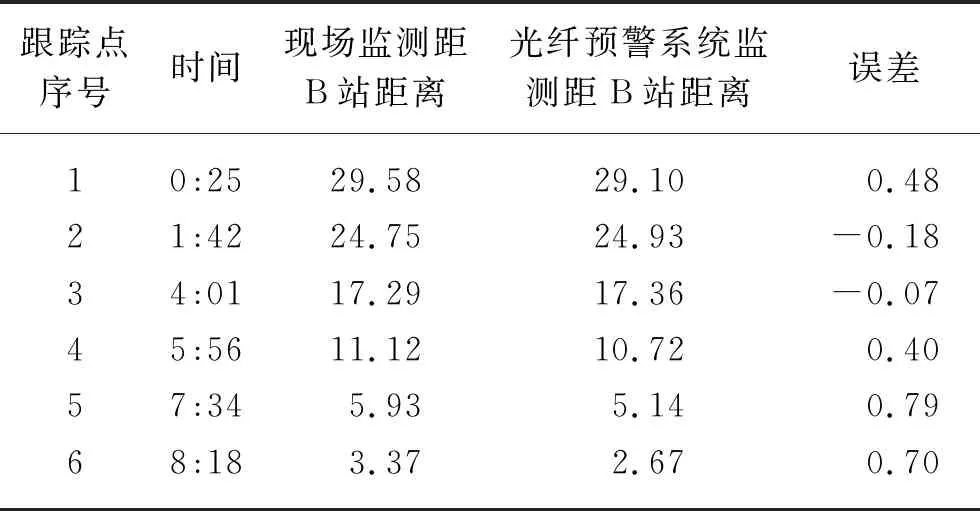
表1 清管器的监测位置信息 km
表1中现场监测结果为清管器距B站的实际距离,将光纤预警系统监测位置与实际监测位置对比,光纤预警系统的定位误差曲线如图3所示,同时得出以下结论:
1)对于指定的多个监测点,光纤预警系统均可以准确地监测到清管器的位置。
2)清管器的移动位置与时间具有较好的线性关系,清管器在管道内基本以匀速移动。
3)光纤预警系统监测到的清管器位置与实际监测点的定位误差较小,均控制在1 km以内。
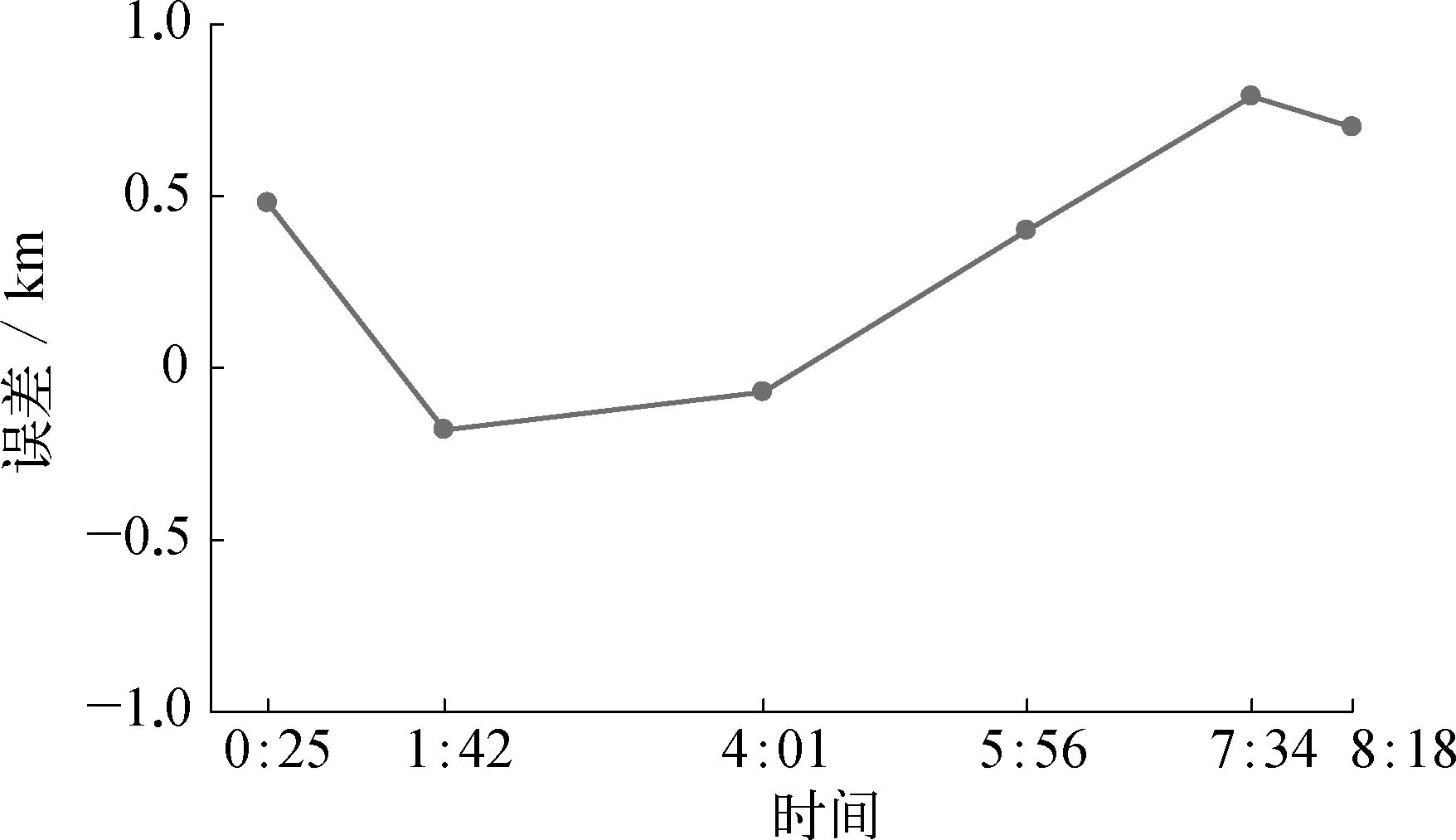
图3 监测时间清管器定位误差曲线
2.2 效果分析
图4所示为2018年7月10日0时起光纤预警系统覆盖部分区域的信号瀑布图,其中横坐标为监测位置距离收球点的距离,纵坐标为时间,黑点表示在对应的时刻和位置产生了1个振动信号,瀑布图描述了光纤预警系统采集到的距B站15~30 km管道沿线的振动情况。结合现场情况分析图4可知:
1)虚线处为清管器移动轨迹,清管器于2018年7月10日0时自30 km处匀速向收球点移动,于当日4时20分左右移动到15 km处,可以直观地监测出清管器的移动轨迹。
2)清管器以约3.4 km/h的速度移动,全线监测效果良好。

图4 光纤预警系统覆盖区域信号瀑布示意
综上分析可知,由于光纤预警系统采用分布式光纤传感器采集清管器工作时产生的振动信号,可以实时跟踪清管器的位置,避免了常规固定点监测方法中存在的清管器监测盲区等情况;同时,该系统监测清管器的定位误差较小,具有对清管器移动位置精确定位的能力。
3 结束语
本文介绍了光纤预警系统在清管器轨迹跟踪定位中的实际应用,系统采用分布式光纤传感器采集清管器工作时在管道内产生的振动信号,实现了清管器的定位、跟踪与实时运动轨迹监测,具有实际应用价值。
