双旋永磁同步电动舵机建模与仿真研究
2019-07-05贾方秀张天宇
李 浩,贾方秀,周 强,张天宇
(南京理工大学 智能弹药技术国防重点学科实验室, 江苏 南京 210094)
以固定鸭式舵机为修正执行机构的双旋弹道修正弹,鸭舵在气动导转力矩、隔转阻尼力矩以及电磁控制力矩的综合作用下相对于弹体低速反旋,其修正原理为:通过控制鸭舵位于某一特定角度产生相应的修正力和修正力矩,改变弹丸的攻角以及飞行轨迹,从而实现二维弹道修正。永磁同步电机具有结构简单、体积小、效率高,转矩脉动小等优点,在制导弹箭上得到广泛应用。空间矢量脉宽调制技术是现在电机控制的研究热点,该技术利用6个桥臂开关信号的不同组合,产生8个基本电压空间矢量来合成实际的电压空间矢量,使该合成矢量的旋转轨迹尽量逼近圆形以获得准圆形旋转磁场,具有谐波优化程度高、电压利用率高、易于数字化等优点,使电机获得较好的控制性能[1]。
为了实现快速、准确的舵机滚转控制,考虑弹丸的双旋特性,利用Simulink建立了基于SVPWM的三闭环双旋舵机控制系统仿真模型,为实际系统的设计与实现提供验证。
1 空间矢量控制原理
1.1 坐标变换
为了简化自然坐标系下三相PMSM的数学模型,采用的坐标变换通常包括静止坐标变换(Clark变换)和同步旋转坐标变换(Park变换)。它们之间的坐标关系如图1所示,其中ABC为自然坐标系,α-β为静止坐标系,d-q为同步旋转坐标系。

图1 各坐标系之间的关系
将自然坐标系ABC变换到静止坐标系α-β的坐标变换为Clark变换,根据图1各坐标系之间的关系,得到如式(1)所示的坐标变换公式:
(1)

将静止坐标系α-β变换到同步旋转坐标系d-q的变换为Park变换,坐标变换公式如下:
(2)
1.2 SVPWM原理
SVPWM算法的理论基础是平均等效原理,即在一个开关周期Ts内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。通过6个桥臂开关的不同组合产生8种基本空间电压矢量,将复平面α-β分成6个扇区,如图2所示。

图2 电压空间矢量图
图2中,U0(000)和U7(111)对应输出的电压空间矢量为零,称为零矢量,其余6个称为有效矢量,有效矢量的长度均为直流母线电压Ud的2/3。为获得旋转的电压空间矢量Uout,可由该矢量所在扇区的2个相邻非零矢量和零矢量在时间上的不同组合得到。以扇区Ⅰ为例,根据平衡等效原则可得下式:
(3)
式(3)中,T4、T6和T0分别为U4、U6和零矢量U0(U7)的作用时间。由图2可知:
(4)
式中,θ为Uout与复平面实轴α之间的夹角。把式(4)代入式(3),得:
(5)
零矢量对矢量的合成不产生影响,由等式两边实部和虚部相等得:
(6)
如果T4+T6>Ts,则需进行过调制处理,令:
(7)
为使PWM波形对称,把每个矢量的作用时间都一分为二,同时把零矢量的作用时间等分给2个零矢量U0和U7,令产生的开关顺序为U0-U4-U6-U7-U6-U4-U0,如图3所示。既提高了对直流电压的利用率,又降低了逆变器输出的谐波含量。
图3 开关切换顺序与PWM波形
1.3 SVPWM实现
要实现SVPWM信号的实时调制,首先需要知道电压矢量Uout所在的扇区,然后计算各扇区非零矢量与零矢量的作用时间以及各扇区矢量切换点,最后使用一定频率的三角载波信号与各个扇区矢量切换点进行比较,从而产生逆变器所需的PWM脉冲信号。
用Uα和Uβ表示参考电压在α、β轴上的分量,再定义3个变量A、B、C,通过分析可以得出:
若Uβ>0,则A=1,否则A=0;


令N=4C+2B+A,则可以得到N与扇区的关系,如表1所示。

表1 N与扇区的对应关系
定义T1和T2为不同扇区内相邻2个向量的作用时间,令:
(8)
可以得到各个扇区T1和T2作用的时间,如表2所示。

表2 各扇区T1和T2作用时间
定义:
(9)
则三相电压开关时间切换点Tcm1、Tcm2和Tcm3与各扇区的关系如表3所示。
表3 各扇区时间切换点Tcm1、Tcm2和Tcm3
2 Simulink建模
在分析永磁同步电机控制原理和空间矢量调制方法的基础上,分别设计和建立了双旋永磁同步电动舵机的控制系统框图如图4和仿真模型如图5。
永磁同步电机闭环控制即矢量控制的实质是对电机的定子电流矢量的幅值和相位进行控制,常见的方法有id=0控制和最大转矩电流比控制。当采用id=0控制策略时,电机只存在永磁体产生的转矩分量,在这种模式下运行的电机,其反电势与定子电流同相,即定子电流没有无功分量,全部用来提供有效的电磁转矩,铜耗较低且效率较高。
如图4所示,系统采用三闭环控制方案,控制器均采用PI调节器。外环为位置环,其给定位置为鸭舵(转子)相对于惯性系的角度,然而在模型中只能测量转子相对与定子即鸭舵相对于弹体的角度,因此需要位置解算模块来实时解算出鸭舵相对于惯性系的角度作为位置环的反馈。位置环的输出和弹体(定子)转速一起作为速度环的给定输入,鸭舵相对于弹体即转子相对于定子的转速作为速度环的反馈。速度环的输出作为q轴电流环的给定输入,d轴电流环的给定输入始终为零,三相电流经过坐标变换后分别作为各自电流环的反馈。电流环的输出经过SVPWM算法后产生6路驱动信号控制逆变器的开关顺序和导通时间,从而实现了双旋舵机的矢量控制。
系统由各个功能独立的子模块组成,主要包括PMSM本体模块、坐标变换模块、矢量控制模块、电压逆变模块。
2.1 PMSM本体模块
Simulink自带的PMSM模型能够同时设置定子和转子的工作状态,因而能够模拟双旋舵机的弹体旋转,电机基本参数如表4所示。
通过理想的角速度源模块使电机的定子以一定的转速相对于转子反旋来模拟实际过程中弹体的旋转。通过理想的力矩源模块给转子加载一定的负载力矩来模拟实际飞行过程中鸭舵受到的气动力矩。通过理想的旋转运动传感器来实时测量转子(鸭舵)相对于定子(弹体)的转速和位置信息。
图4 三相PMSM矢量控制系统框图

图5 双旋PMSM矢量控制仿真模型
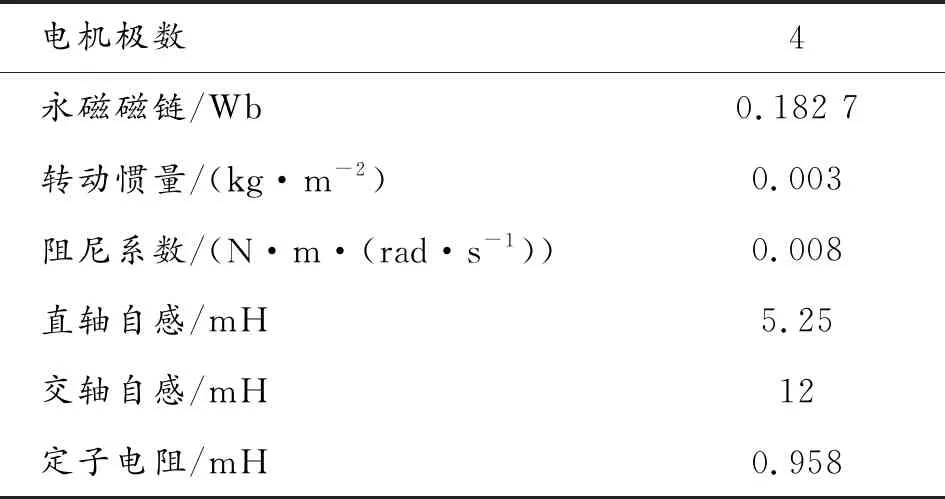
表4 PMSM参数设置
2.2 坐标变换模块
从自然坐标系ABC到同步旋转坐标系d-q的坐标变换公式为:
根据上式搭建模块如图6所示。

图6 从ABC到d-q坐标系的变换模块
将同步旋转坐标系d-q变换到静止坐标系α-β的坐标变换公式,称之为反Park变换。
(10)
由于Simulink自带的坐标系与前面介绍的坐标系并不相同,两者相差90°,如图7所示。
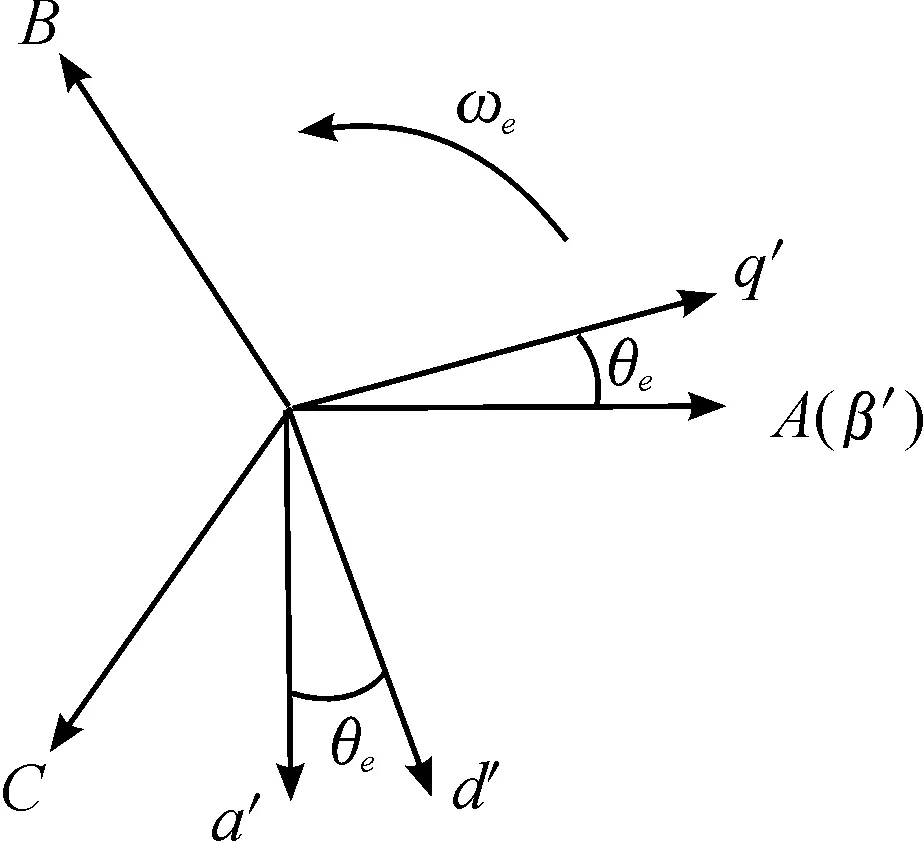
图7 Simulink自带的坐标系
两者存在如下关系:
(11)
搭建模块如图8所示。
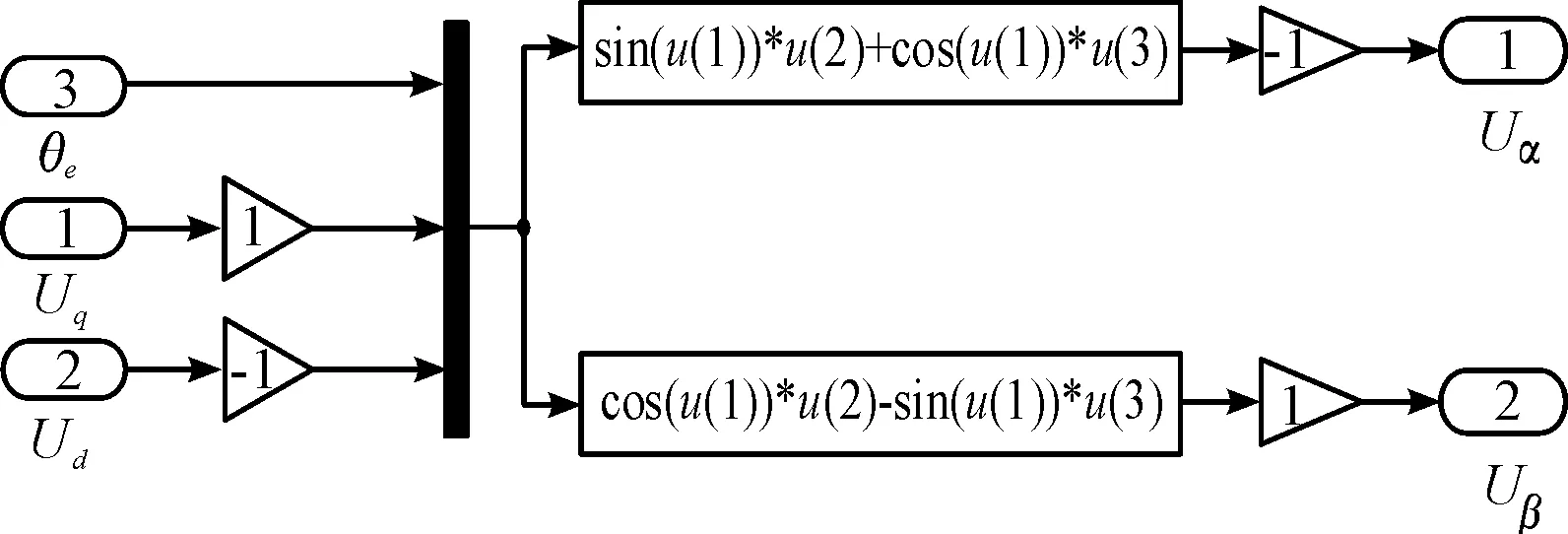
图8 反Park变换模块
2.3 矢量控制模块
矢量控制模块包括位置环、转速环、电流环和SVPWM计算模块,其中三环均选用传统PI调节器。
位置环的难点主要在于反馈位置解算模块的搭建,在位置环参与控制的时刻t1记录鸭舵(转子)相对于弹体(定子)的位置θ1,等到t2时刻记录此时鸭舵相对于弹体的位置θ2。
在t1-t2时间内弹体相对惯性系转过的角度为:
θ弹地=ω弹×(t2-t1)
(12)
因为鸭舵与弹体反旋,则鸭舵相对于惯性系转过的角度为:
θ舵地=(θ2-θ1)-ω弹×(t2-t1)
(13)
搭建位置解算模块如图9所示。

图9 位置解算模块
转速环控制器的表达式[3]为:
(14)


图10 速度环PI调节器的仿真模块
采用常规的PI调节器并结合前馈解耦控制策略,可得到d-q轴的电压为[5-6]:
(15)
搭建模型如图11,图12所示。
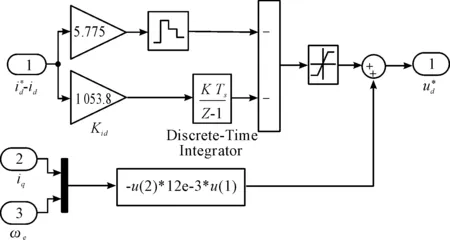
图11 d轴电流环调节器仿真模块
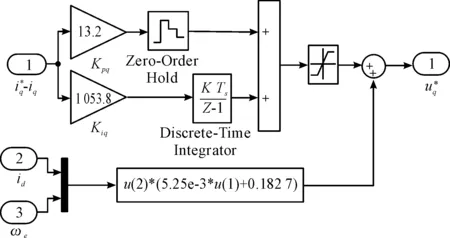
图12 q轴电流环调节器仿真模块
Simulink自带了SVPWM模块,将其参考电压矢量输入类型设置为静止坐标系下的α-β分量,开关模式选择Pattern #1,PWM开关频率设置为10 kHz后,即可按上文所述原理输出六路驱动信号。
2.4 电压逆变模块
调用Simulink自带的电压逆变模块,设置为MOSFET工作模式,其等效模型如图13所示。

图13 两电平三相电压源逆变器模块原理图
3 仿真结果分析
运行仿真,结果如图14、图15所示。
仿真条件设置为:给定电机定子转速300 r/min,位置环在0.2 s时参与控制,给定位置为100°,在0.6 s加载扭矩10 N·m,采用变步长ode23tb算法,相对误差为0.000 1,仿真时间为1 s。
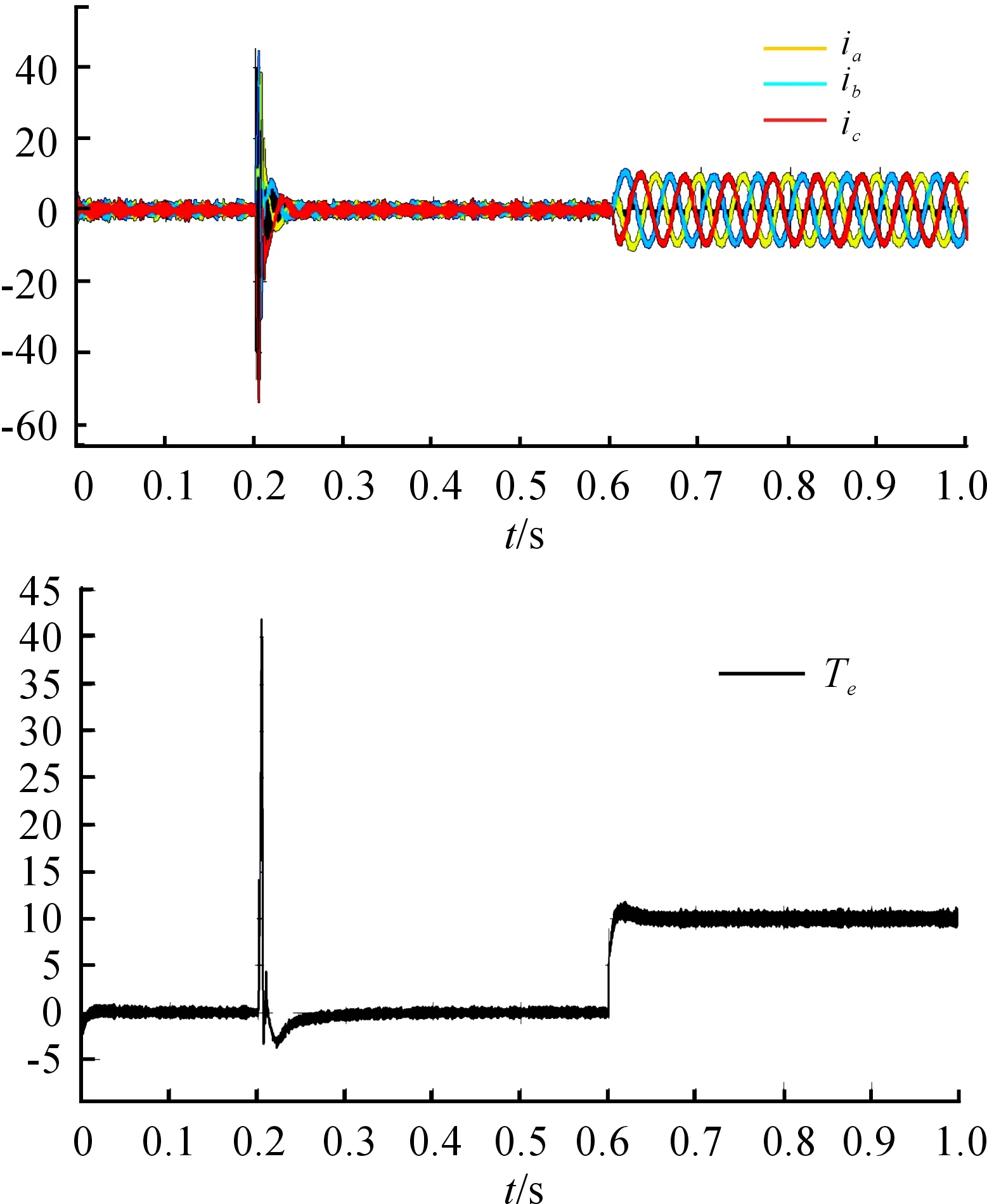
图14 三相电流iabc和电磁转矩Te变化曲线
从以上仿真结果可以看出,在0~0.2 s内,只有速度环起作用,其响应时间约为0.05 s,在0.2 s时刻,位置环参与控制,其响应时间约为0.2 s,由于位置环的输出叠加在了速度环的给定输入上,因此图15中速度曲线跟随位置曲线的变化。位置稳定后,在0.6 s时刻突加负载转矩10 N·m,由于负载增大,电机的电流和输出扭矩相应增大,且电机输出扭矩也为10 N·m从而能够抵消负载扭矩保持平衡。此时,虽然速度和位置曲线均出现波动,但波动较小,且都能够以较快的速度恢复到给定值 ,恢复时间约为0.1 s。

图15 转速N和反馈位置曲线
4 结论
本文在研究双旋舵机控制原理和空间矢量脉宽调制技术的基础上,利用Simulink仿真工具模拟弹上实际环境,搭建了双旋永磁同步电机矢量控制模型,仿真结果与理论分析预期结果一致,并具有较好的动态性能和抗干扰能力,能够满足实际电机控制性能的需要。