单兵助力外骨骼系统控制方案遗传算法仿真
2019-07-05李回滨管小荣
李 杨,李回滨,李 仲,管小荣, 徐 诚
(1.泰州学院 船舶与机电工程学院, 江苏 泰州 225300;2.南京理工大学 机械工程学院, 南京 210094)
单兵助力外骨骼系统,是一种穿戴于人体,为人体负重提供助力的装置[1]。可用于在士兵负重行军时,实时向穿戴者提供行走助力,以降低士兵的行军负担,提高行军效率的装置[2]。同样适用于地震灾区等运输困难地区的物资输送。目前,国内单兵助力外骨骼系统得到了军方的重大关注。于2015年,总装备部轻武器论证研究所主办举办了助力无限外骨骼挑战赛,并计划于2019年10月举行第二届单兵助力外骨骼全国挑战赛。
在单兵助力外骨骼控制方案方面,美国伯克利大学是较早系统研究助力外骨骼的机构,其样机BLEEX[3-5]采用了一种新颖的灵敏度放大控制的按方案,此控制方案对传感器的灵敏度以及结构的动力学模型有极高要求。日本筑波大学研制的HAL[6]样机采用肌电控制策略,但由于肌电传感器易脱落并且需要紧贴于人体皮肤,因此难以用于辅助士兵行军。新加坡南洋理工学院研制的外骨骼样机[7]采用ZMP控制策略,所实现的外骨骼行走步态与人体相差较大。中国海军航空工程学院的杨智勇[2]等提出了基于位置内环的直接力控制策略,期望单兵助力外骨骼的广义接触力为零。
肌电控制方案及灵敏度放大控制等都是人体运动预判控制方案,也是大多数研究者倾向于采用的单兵助力外骨骼系统控制方案。在我们先期的研究工作中,提出了将人体看作单兵助力外骨骼系统的工作环境,基于电机电流控制环的外骨骼交互力控制方案。通过力控制方式使外骨骼与人体时刻保持较小的交互作用力[8],并能使系统保证较高的响应速度,从而实现人机协调。但是,通过建模仿真及实验,研究结果表明,此单兵助力外骨骼传统交互力控制方案中采用的PI控制器不具备较好的适应性。因此,本文提出使用遗传算法对单兵助力外骨骼系统传统PI控制器进行优化。
1 单兵助力外骨骼交互力控制方案
所设计的单兵助力外骨骼交互力控制方法只对力信号进行控制,控制方案原理框图如图1所示。当外骨骼与人体运动不一致时,拉压力传感器检测到人机交互作用力并通过PI控制器控制电机转矩使外骨骼顺从于人体的运动,从而实现人机协调运动并保持较小交互作用力。
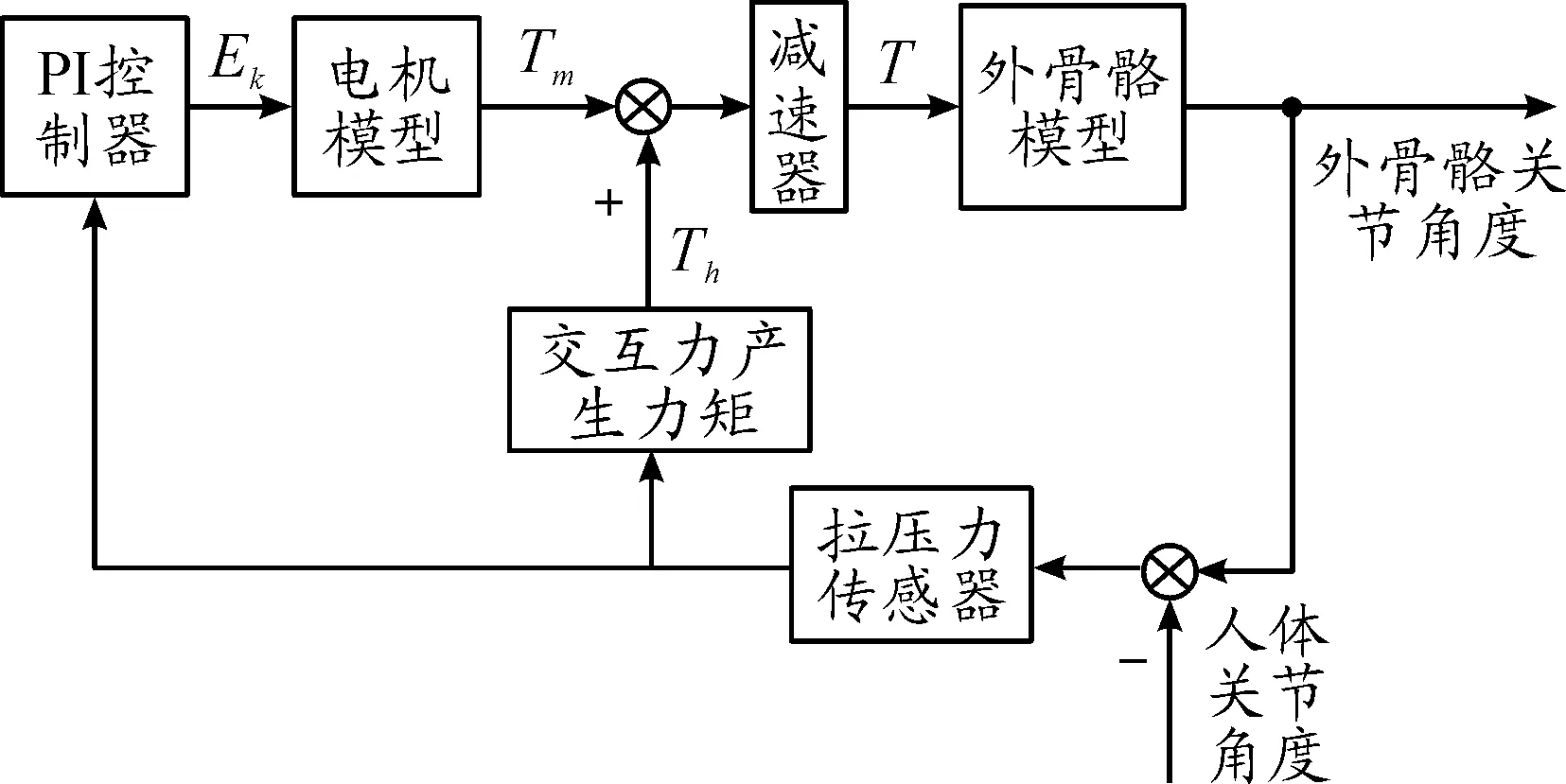
图1 外骨骼交互力控制方案原理框图
1.1 单兵助力外骨骼交互力控制方案仿真模型
根据人机电总体系统模型建立的Simulink仿真模型如图2所示。模型中外骨骼模型为平面三连杆结构状态微分方程,电机的控制信号由小臂的交互力信息经由PI控制器处理获得[9]。
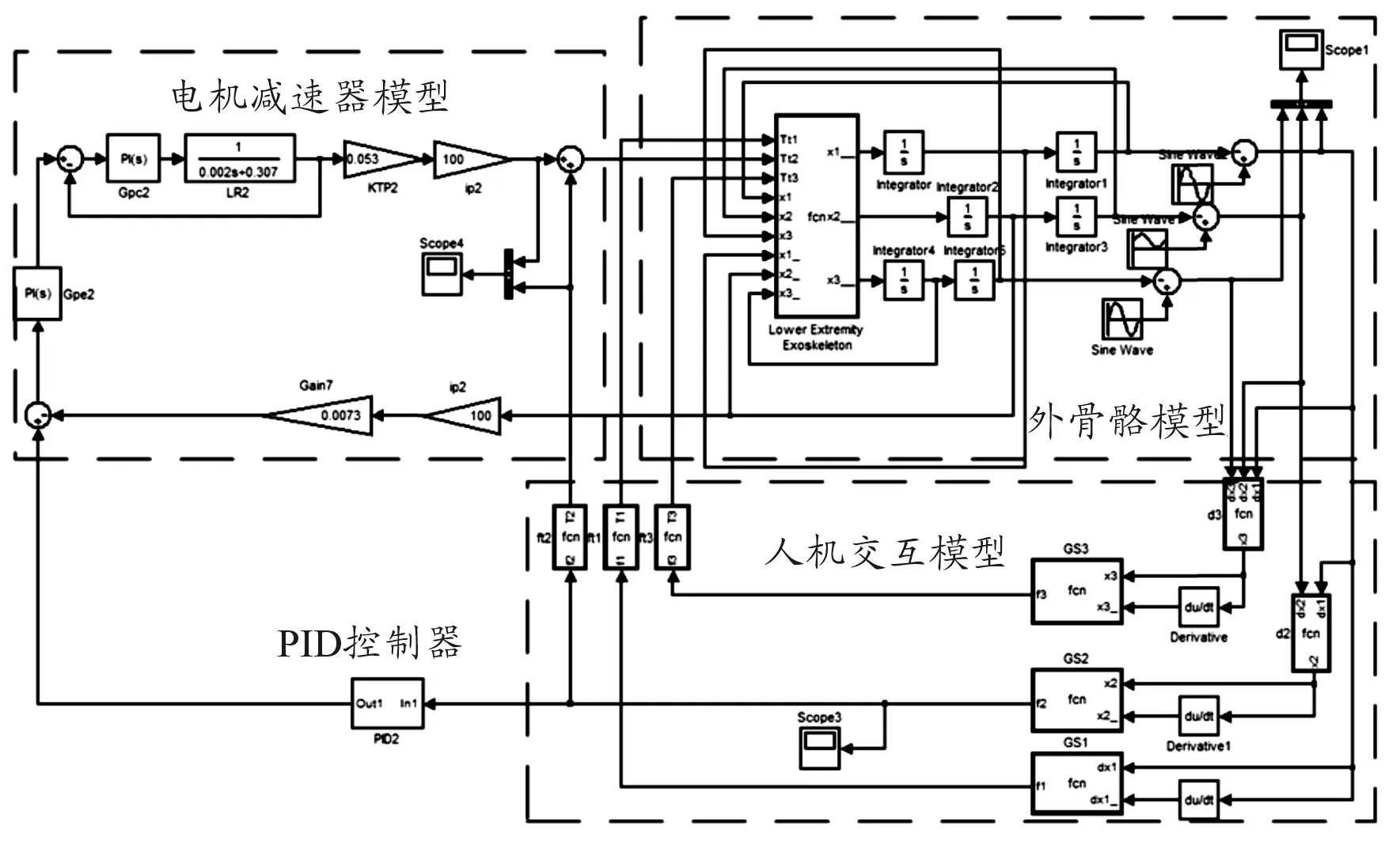
图2 人机电一体化仿真模型
1.2 单兵助力外骨骼交互力控制方案仿真结果
1.2.1角度偏差
在Simulink仿真模型中设置仿真参数,进行仿真获得的外骨骼与人体关节角度偏差曲线如图3、图4所示。
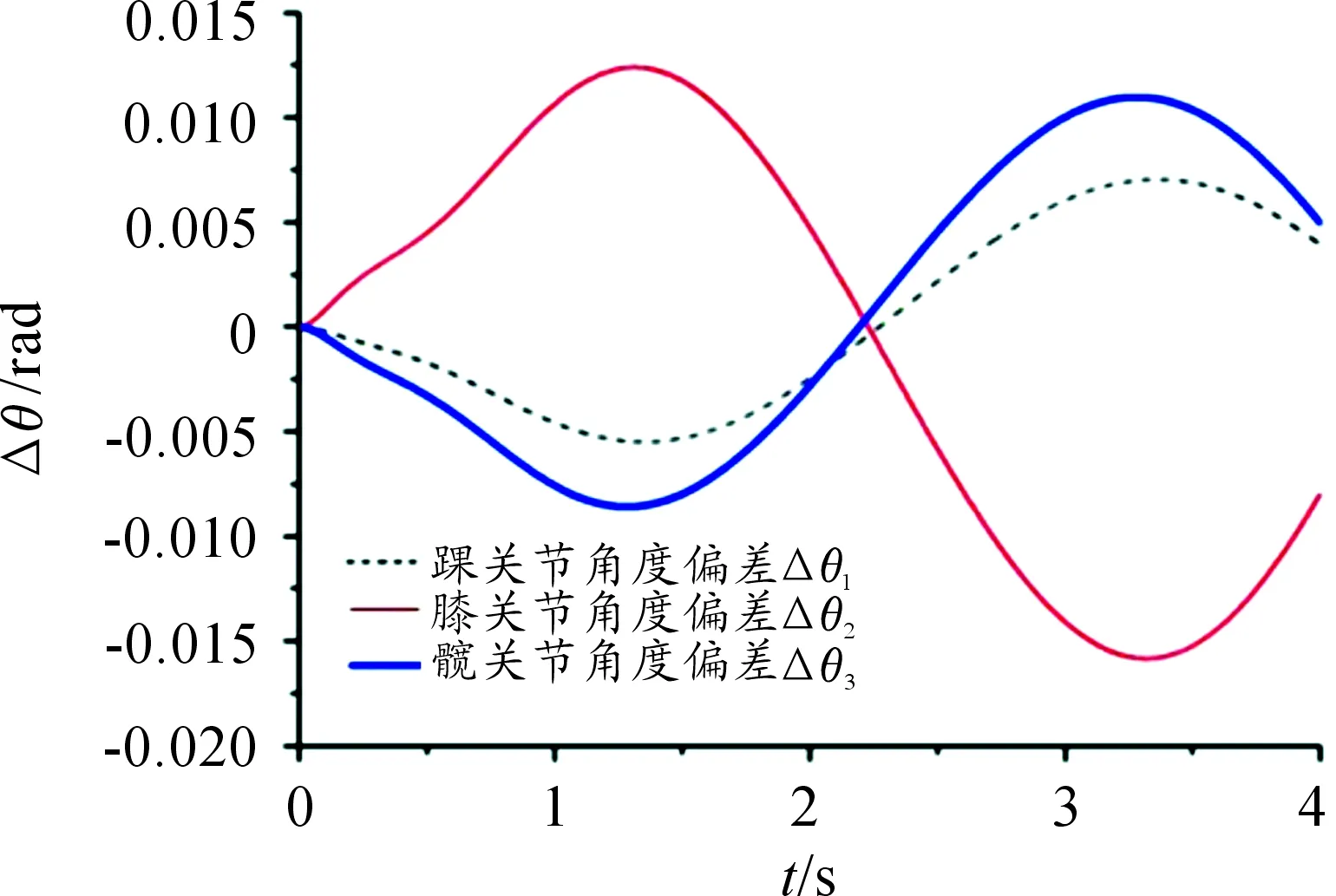
图3 低速角度偏差曲线
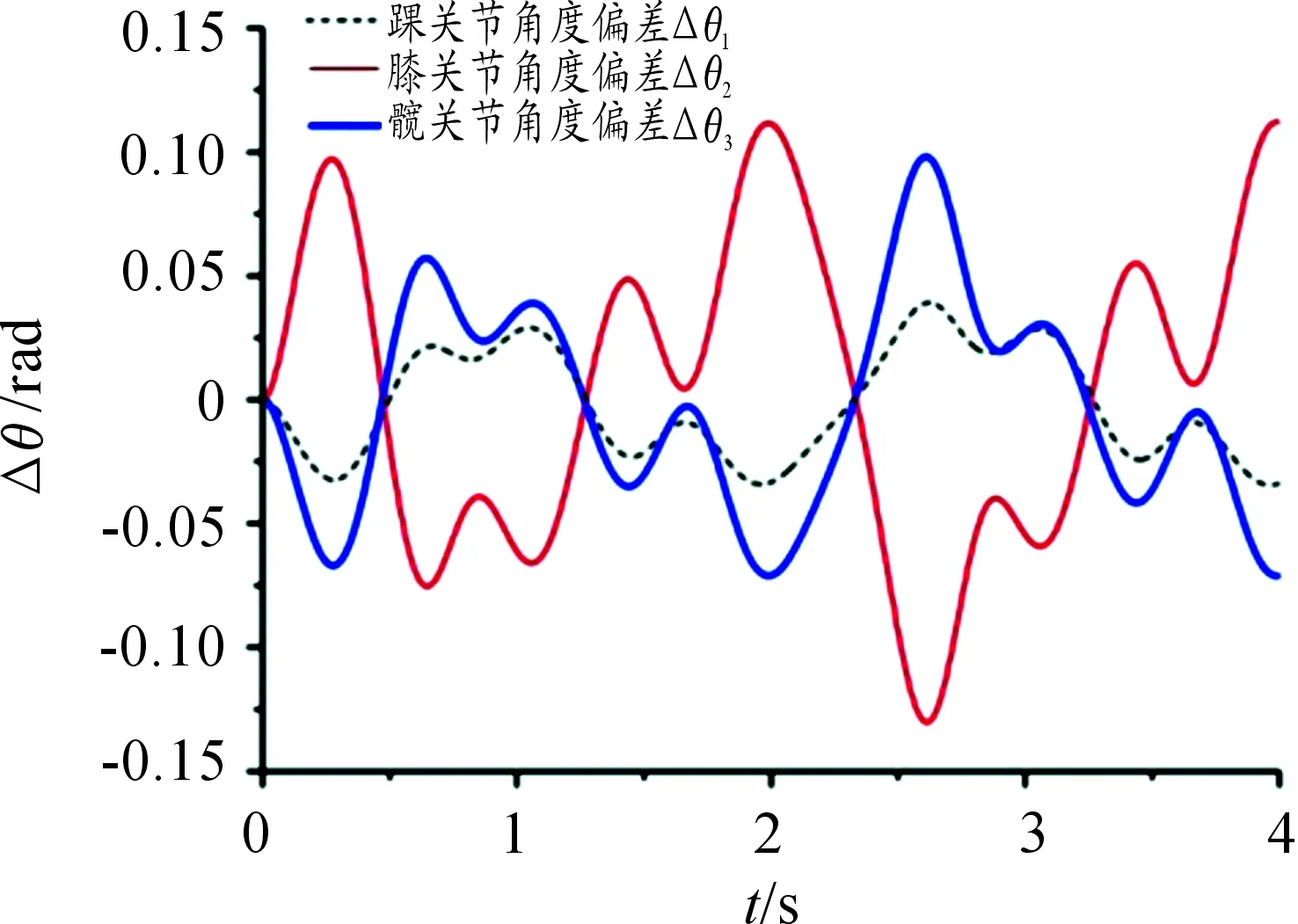
图4 高速角度偏差曲线

分析可知,由于是根据低速运动整定的PI控制器参数,因此低速运动时,单兵助力外骨骼能够较好地匹配人体运动。而当运动速率及幅度提高到高速运动时,外骨骼与人体角度偏差较大,虽然较大仍在勉强接受范围之内,但必将较大地影响系统性能。
1.2.2驱动转矩
仿真获得电机与人体在外骨骼踝关节、膝关节及髋关节的驱动转矩曲线如图5~图8所示。
由图5~图8可知,单兵助力外骨骼的关节电机驱动转矩远大于人体驱动转矩。说明外骨骼在背负较重负载行走时,其大部分关节驱动转矩由电机提供。因此,验证了此交互力放大控制方案的助力效果。
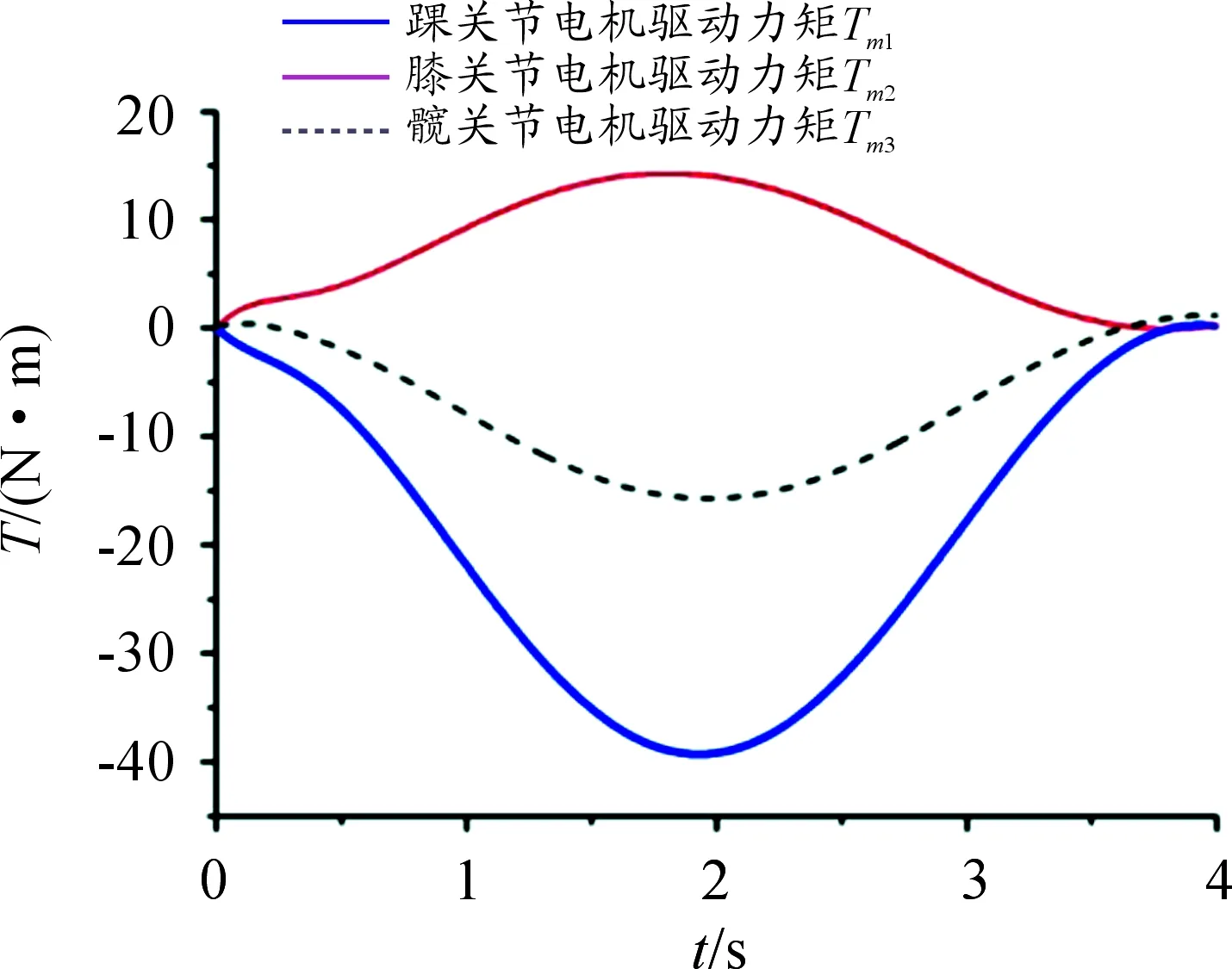
图5 低速运动电机驱动转矩曲线
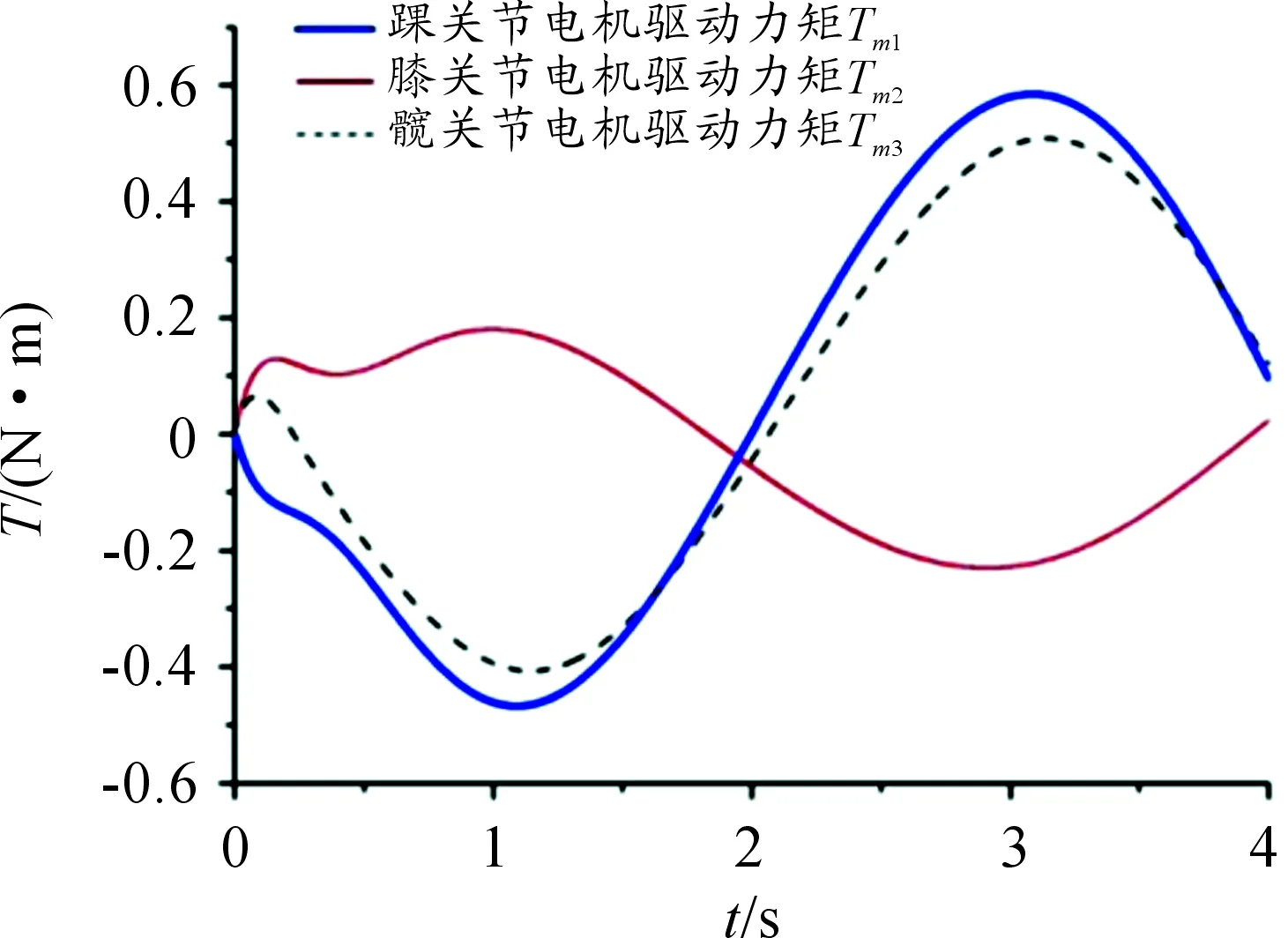
图6 低速运动人体驱动转矩曲线
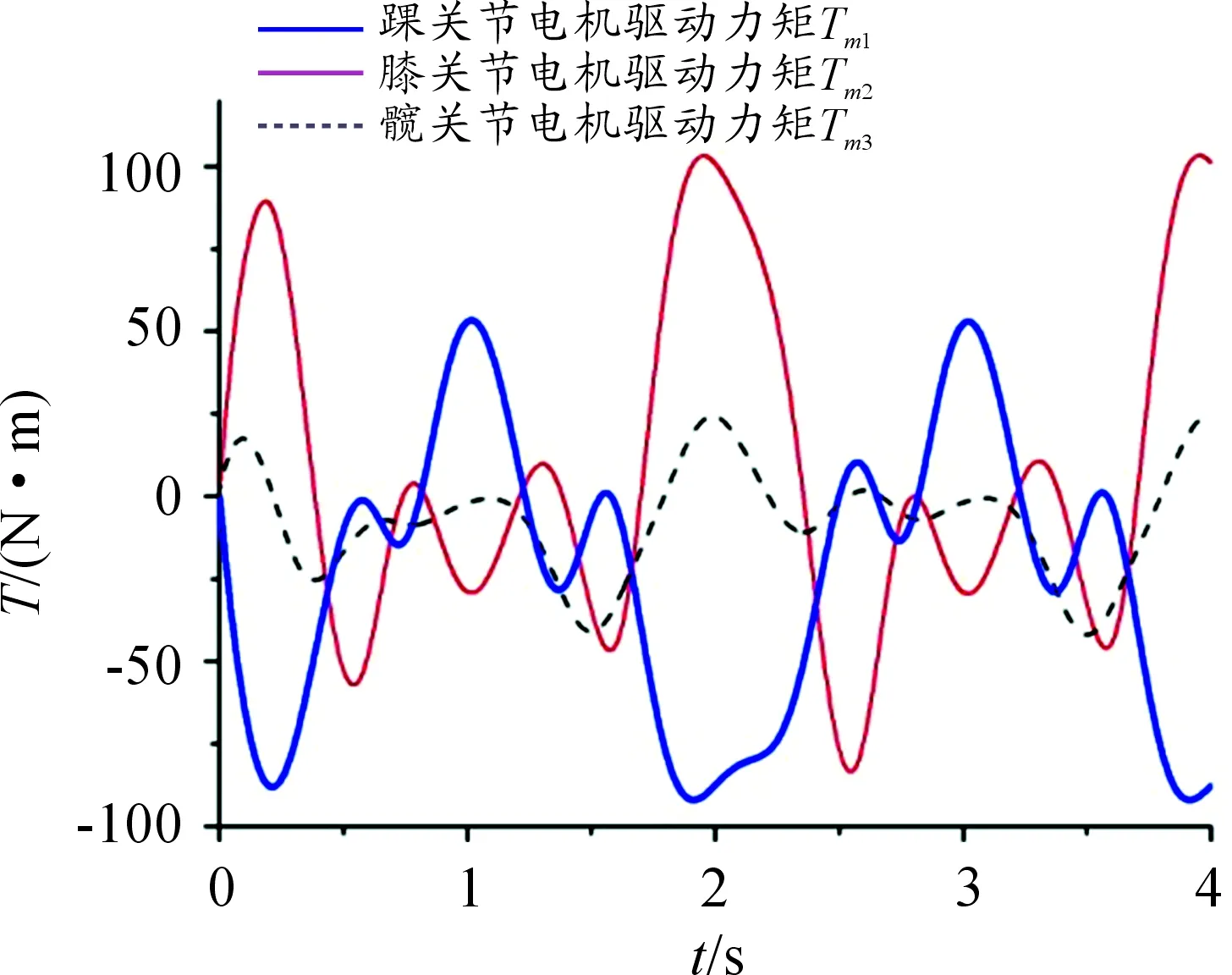
图7 高速运动电机驱动转矩曲线
此外,同样能够看出高速运动时控制效果要差很多,说明固定参数的传统PI控制器应用于外骨骼时没有较好的工况适应性。因此需对单兵助力外骨骼系统的PI参数进行自适应整定,使其在各种运动工况下都具有较好的控制效果。
2 外骨骼遗传自适应PI控制器参数整定
外骨骼遗传自适应PI控制器参数整定步骤如下。
步骤1编码。定义单兵助力外骨骼PI控制器,比例参数及积分参数染色体编码如下:
(1)
步骤2产生初始群体。使用随机函数产生具有不同比例、积分系数的G个个体组成的初始群体。
(2)
(3)
步骤4交叉。采用算术交叉的方法,α为0~1随机数,交叉后单兵助力外骨骼相邻的染色体如下:

(4)
定义自适应交叉概率pc如下:
(5)
步骤5变异。选择单兵助力外骨骼群体中的一个个体i,以一定的概率对选中的个体随机地改变字符串中某个字符的值,即:
(6)
定义自适应变异概率pm如下:
(7)
步骤6选择。计算每个个体的适应度值,将当前群体中适应度值高于下代群体中最高适应度的个体复制到下一代,替换下一代中适应度较低的个体。
步骤7收敛判断。如达到收敛标准,则把适应度值高的字符串作为结果,否则从步骤3重复以上操作。
步骤8解码。把达到收敛标准的适应度值高的字符串解码变成实际的单兵助力外骨骼自适应PI控制器的P、I参数。
3 仿真分析
3.1 遗传自适应PI控制器仿真模型
单兵助力外骨骼遗传自适应PI控制器仿真模型框图如图9,S-Function即为使用程序实现的遗传自适应算法,外骨骼其他模型不变。
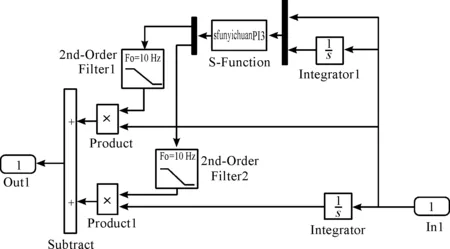
图9 遗传自适应PI控制器仿真模型框图
3.2 角度偏差
将单兵助力外骨骼仿真模型的PI控制器换成遗传自适应PI控制器,仿真获得支撑腿外骨骼与人体的关节角度偏差曲线如图10、图11所示。
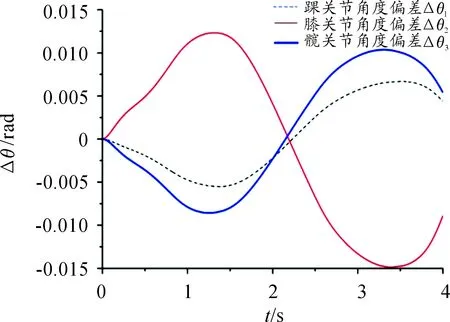
图10 低速运动关节角度偏差曲线

图11 高速运动关节角度偏差曲线

3.3 驱动转矩
由图12~图15可以看出,在添加了遗传自适应算法后,高速运动时人体需要提供的驱动转矩有一定降低,即降低了人机交互作用力,提高了人体舒适性。

图12 低速运动电机驱动转矩曲线
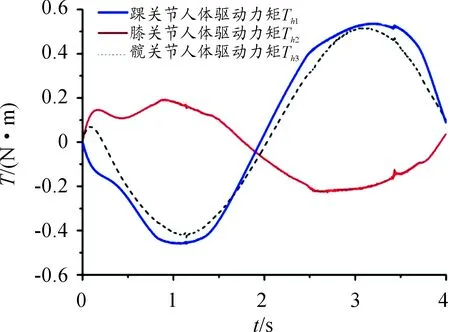
图13 低速运动人体驱动转矩曲线

图14 高速运动电机驱动转矩曲线
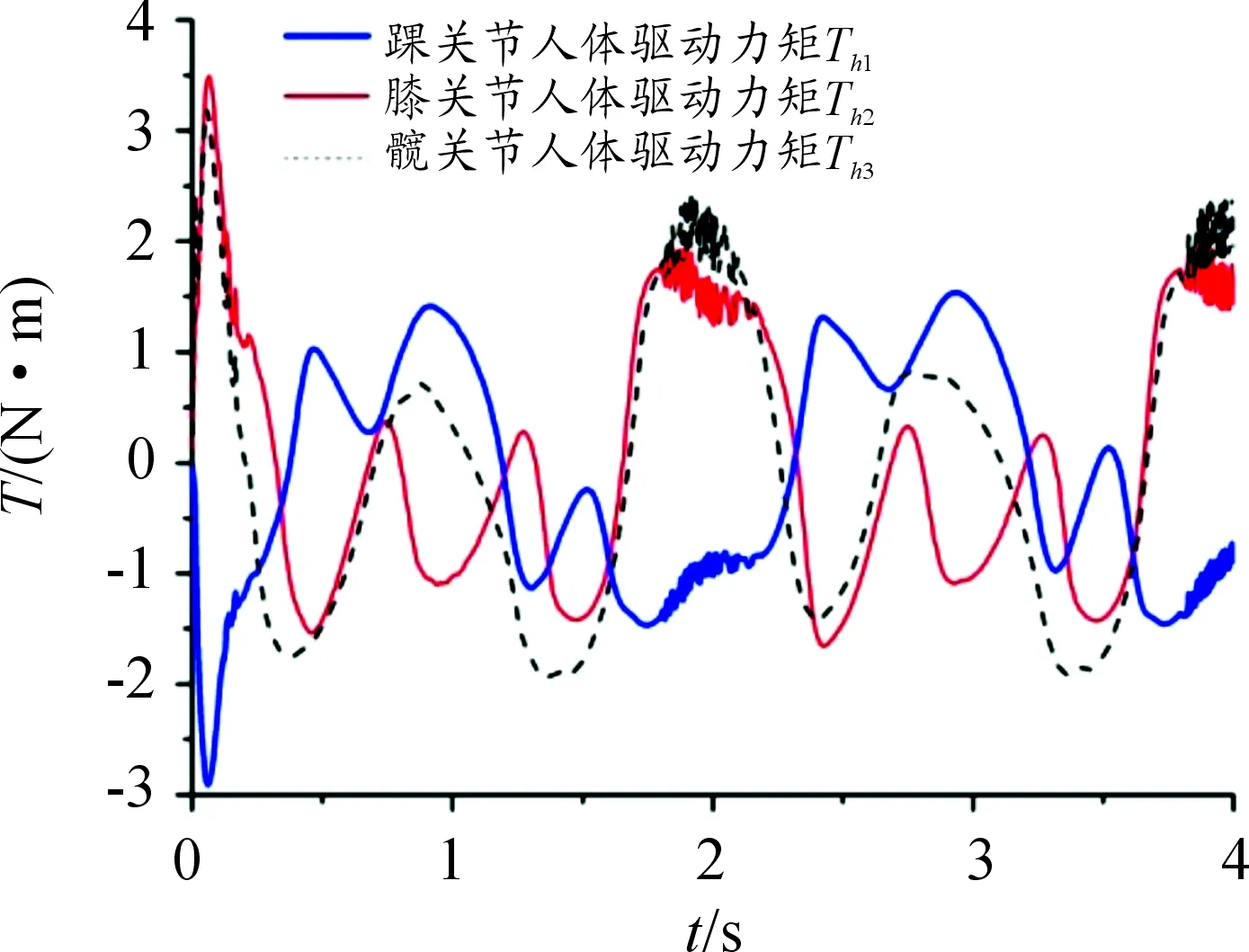
图15 高速运动人体驱动转矩曲线
4 结论
通过遗传自适应算法对单兵助力外骨骼的交互力放大控制方案中的PI控制器进行了优化。通过仿真发现,所设计的遗传自适应PI控制器能够使低速运动时的系统特性保持较好,同时还能够使高速运动时人机交互作用力大幅减小、人体舒适性有所提高。从而说明了所设计的遗传自适应PI控制器能够有效提高单兵助力外骨骼系统的环境适应性。