上肢穿戴式弹药托举装置运动学及工作空间分析
2019-07-05李回滨管小荣
李回滨,管小荣,李 仲,李 杨
(1.南京理工大学 机械工程学院, 南京 210094; 2.泰州学院 船舶与机电工程学院, 江苏 泰州 225300)
随着科技的不断发展,外骨骼助力机器人作为一种可穿戴式人体辅助机器人,被广泛应用于医疗、军事等领域。它是一种根据人体需求对人体运动进行主动助力或辅助助力的人机电一体化设备。2000年,美国国防高级研究计划局(DARPA)启动了“增强人体体能外骨骼(EHPA)”计划,将外骨骼的研究推向了高潮[1-4]。在战场勤务作业中,士兵往往要承担较重的负担,尤其对于轮式火炮以及飞机等装备,装填炮弹和挂载导弹需要多人协同才能完成,工作效率较低。针对这一问题,世界各国基于不同任务开发了相应的外骨骼助力机器人,针对搬运弹药、物资及挂弹等任务的全身外骨骼助力机器人有XOS、BE等[5-7]。助力外骨骼虽然得到了有效的发展,但在发展过程中面临的问题也在不断增多,最突出的是人机匹配性。对装置进行运动学和工作空间分析对于提升人机匹配性具有显著意义。鲁泽华、邹春喜、邓明君均基于D-H模型对上肢外骨骼的正逆运动学进行求解,并利用蒙特卡罗法求解运动空间[8-10],这种方法对于连杆结构的适用性较好,分析结果也具有一定的相似性,但是缺少对结构本身运动关系的分析,并且目前都是采用现有的理论基础对结构分析,属于应用型研究。陈伟海等运用指数积公式对下肢外骨骼机构的位置正反解进行研究分析,同时对该机构的雅可比矩阵和运动奇异性进行分析,并优化其工作空间[11]。因而本文从研究人体上肢结构的运动学出发,就单一弹药托举任务设计了一款简易的上肢穿戴式弹药托举装置,目的是辅助士兵作业,减轻其任务负担,提高战场勤务作业效率,间接提升军队战斗力。并以此为基础归纳总结基于机构本身的几何关系、坐标相位等因素的机构运动学分析方法,对上肢穿戴式弹药托举装置的运动学和工作空间进行分析,有助于从运动学和受力的角度更好的设计用于上肢托举搬运任务的上肢外骨骼,使其达到较高的人机匹配度,从而为设计结构紧凑灵活,匹配度高的上肢助力外骨骼奠定基础。
1 人体上肢结构及关节运动分析
人体上肢一般指从肩关节到指尖的区域,由手臂和关节组成,其具体结构如图1所示。

图1 人体上肢结构示意图
上肢手臂有上臂、前臂和手部;上肢关节有肩关节、肘关节、腕关节和指关节;上肢手臂通过肩关节与躯干相连,肘关节将上臂和前臂连接在一起,腕关节将前臂和手部连接在一起。上肢是人体相对比较灵活的肢体,它的运动形式多样,主要功能是通过不同关节的运用对手部空间姿态进行运动控制。根据人体解剖学和运动学的基本理论,通过设定如图2所示的三个互相垂直的轴线和三个正交平面来正确描述人体的运动状态。

图2 人体运动平面示意图
由人体上肢关节运动机理可以得到人体上肢共有27个自由度,其中手臂部分有7个自由度,手掌部分有20个自由度。手臂部分包含3个肩关节自由度,2个肘关节自由度和2个腕关节自由度。由于人体上肢外骨骼只涉及肩关节、肘关节和腕关节,手掌部分较复杂,一般单独处理,故在分析上肢运动形式时忽略手掌部分的运动,而从肩、肘、腕三个关节的运动开始分析。
肩关节是一种典型的球窝关节,是人体关节中活动范围最大的关节,可做三轴运动。
1) 在矢状面内绕冠状轴作前屈/后伸运动,如图3(a)。从解剖学角度来讲,肩部弯曲运动的范围为130°~180°。但伸展的范围为30°~80°。在运动过程中,肩部的弯曲是由三角肌的前部、胸肌和喙肱肌共同作用产生的。三角肌的后部也为手臂的伸展提供了动力。
2) 在冠状面内绕矢状轴作内收/外展运动,如图3(b)。手臂外展可以达到140°,但内收却只能到50°。三角肌的中间部分同上肩胛骨一起使手臂外展,而胸肌使其内收。
3) 在水平面内绕垂直轴作内旋/外旋运动,如图3(c)。这个动作是围绕上臂部分的肱骨进行的,向内旋转可以达到60°~90°,而向外旋转可以达到90°。
肘关节是蜗状关节,它由桡尺骨的靠近一侧和远离耽骨的一端构成,可完成腕和手部的空间定位,它是一个具有2个自由度的关节,其运动形式为屈伸运动和旋内旋外运动:
1) 屈伸运动,如图4(a)。肘部屈曲是指前臂去接触上臂的动作,相反的动作即是伸展。这个系列动作里,肘部的功能是作为肱骨末端和尺骨以及桡骨近端的活动关节。屈伸的完全伸展的范围可以从过伸-10°到最大的屈曲140°~146°。肘部可以屈曲到160°。但在日常生活中,活动区间在30°~130°。
2) 旋内旋外,如图4(b)。该运动围绕前臂的长枢椎进行的旋转。是指肘部从最初的姿势屈曲90°,手与矢状面平行。旋内是将前臂偏向于手掌或矢状面中间位置的旋转,旋转的最大角度为80°。旋外就是旋转前臂使手掌心朝外或平行于冠状面,朝着矢状轴正向,最大角度为85°,旋转的枢椎与尺桡的近端和末端相交叉。
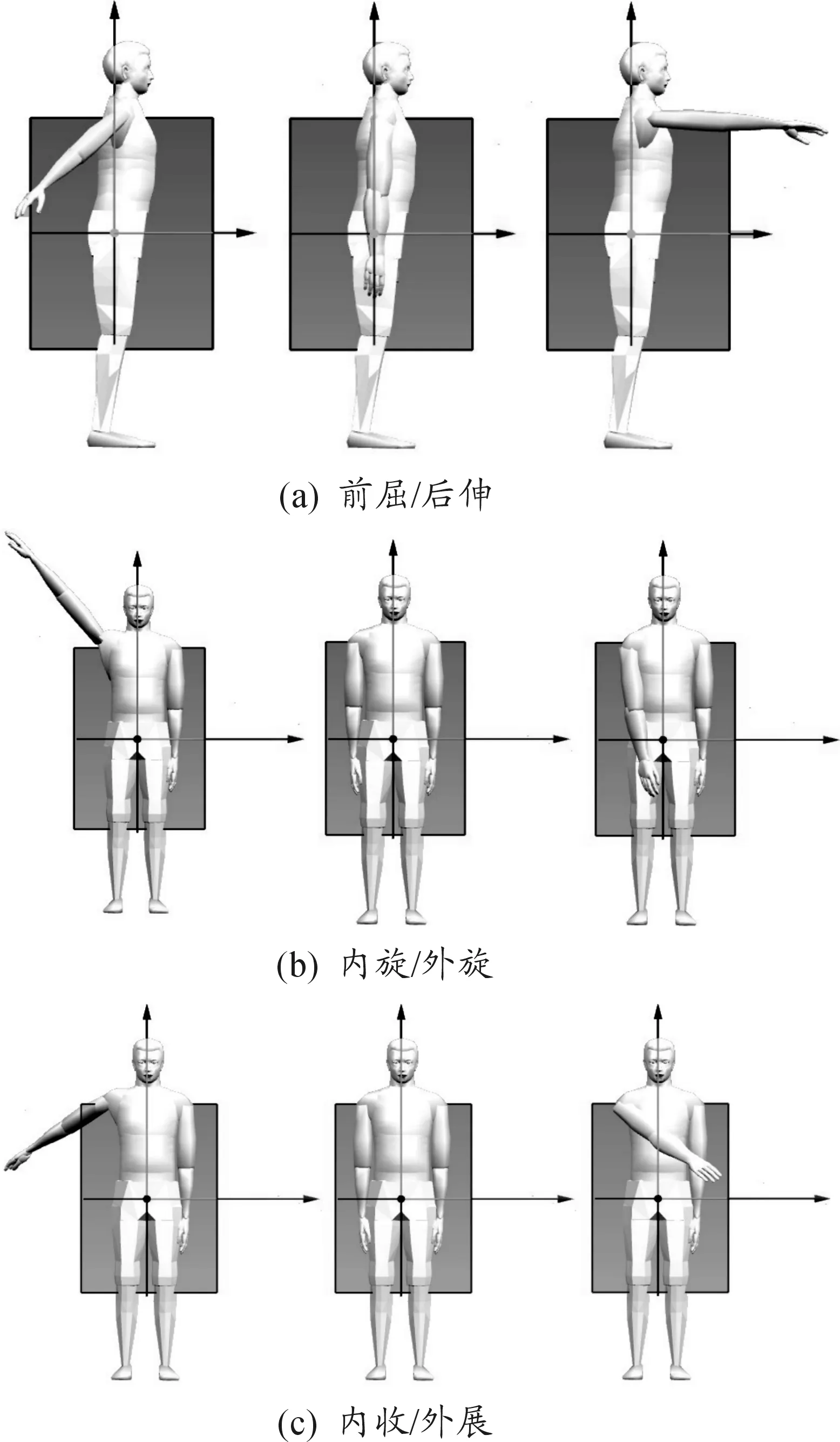
图3 肩关节运动示意图

图4 肘关节运动示意图
腕关节是人体最复杂的关节之一,它包含两排腕骨,必须在具有高灵活性的同时能够承受很大的负重,它包含了两个不同程度的自由度,主要运动形式是屈伸和内收外展。
1) 屈伸运动,如图5(a)所示。腕部的弯曲是指围绕一个横肌旋转,使得手掌接近前臂的运动,伸展是指相反的运动。两者之间存在着很大的不同,大体来讲腕部可以达到90°的弯曲和70°的伸展。最主要的屈肌腱是屈肌腕尺骨和桡骨,它们附着在手腕内侧,它们的收缩不仅可以完成弯曲的动作,还可以内收腕部。类似地,伸肌附着在腕部的外侧,腕部的伸展也包含一些外展。
2) 内收外展运动,如图5(b)所示。该动作是指围绕一个前后枢椎使手朝向尺骨(外展)或者朝向桡骨(内收)。内收可达到30°或者40°,外展则不超过15°。

图5 腕关节运动示意图
根据以上分析并对比相关资料[12]获得表1所示的人体上肢手臂运动范围的基本参数。

表1 上肢关节运动范围的基本参数
分析人体上肢运动的目的是为上肢穿戴式弹药托举装置的设计奠定基础,所以应该从满足上肢穿戴式弹药托举装置的功能和运动灵活性入手。从关节运动的原理来看,肌肉群共同作用牵引骨骼产生运动,考虑到上肢穿戴式弹药托举装置在功能作用上主要是托举支撑,因此在保证上肢的运动分析匹配外骨骼运动特性的前提下,简化上肢冗余运动可以使上肢穿戴式弹药托举装置更好的满足运动学以及工作空间要求。故将上肢的关节运动简化分解为肩关节、肘关节和腕关节在矢状面内绕冠状轴作的屈伸运动以及肩关节在水平面内绕垂直轴作的内收外展运动。并以此为基础设计上肢穿戴式弹药托举装置。
2 上肢穿戴式弹药托举装置
由于关节发生在任何一个平面的运动都必然伴随着其他两个平面的运动,形成所谓的复合运动[12]。故在设计托举装置时,采用异构形式,肩关节设计屈伸和内收外展2个自由度,其中屈伸自由度为主动驱动,内收外展为被动驱动;肘关节设计屈伸自由度,为主动驱动;腕关节屈伸自由度设计为异构形式,由肘关节屈伸实现;上肢穿戴式弹药托举装置的自由度的设置尽可能的满足弹药托举过程所需的功能需求。设计的托举装置如图6所示。
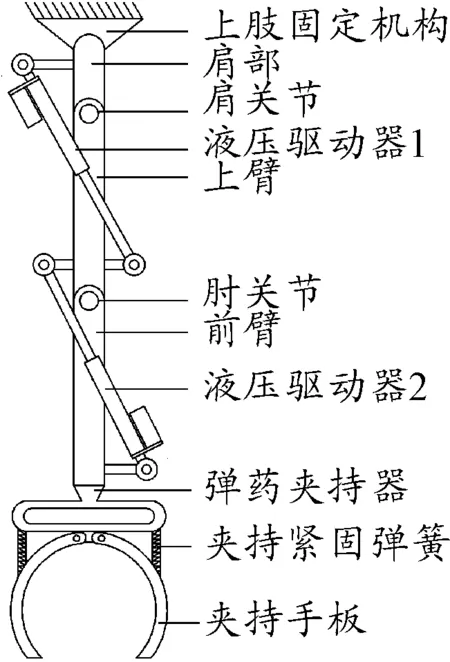
图6 上肢穿戴式弹药托举装置
该托举装置由上肢固定机构、肩部、上臂、前臂、液压驱动器、弹药夹持器组成。工作时,通过夹持紧固弹簧的松紧调整夹持托板的开角,以夹持弹药开始托举上弹,上臂在液压驱动器1作用下绕肩关节旋转相应角度,前臂在液压驱动器2作用下绕肘关节旋转相应角度,从而实现弹药托举。
3 上肢穿戴式弹药托举装置运动学
由于人体上肢运动状态周期具有对称性,在分析人体上肢穿戴式弹药托举装置运动学时,仅对其单侧作分析,以左侧为目标,分析其运动学问题。在建立运动学模型时,可将上肢装置作为一串刚性部段处理,将上臂、前臂和手部看作两个部段,每个部段视作机械构件中的刚性连杆,各个部段或连杆的接合处对应一个关节。建立的托举装置简化模型如图7。
图7中,基础坐标系XBY固定在上肢,O1、O2为关节点,A、C、E、F为液压驱动器与上臂、前臂的铰接点,B、D、G为支点,L1、L2为液压驱动器直线驱动行程。根据图7对肩关节和肘关节在弹药抬举过程中的运动进行单独分析,其运动模型如图8(a),8(b)。

图7 上肢穿戴式弹药托举装置简化模型
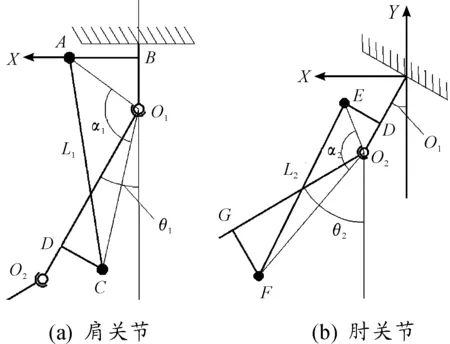
图8 肩关节和肘关节运动模型简图
对肩关节进行分析时,只考虑上臂绕关节点O1的偏转运动,忽略前臂对上臂的影响,θ1为肩关节偏转角度,α1为液压驱动器1力臂之间的夹角;对肘关节进行分析时,只考虑前臂绕肘关节点O2的偏转运动,肘关节点相对上臂固定,忽略上臂对前臂的影响,θ1为肘关节偏转角度,α2为液压驱动器2力臂之间的夹角。根据图8的运动模型推导出肩关节和肘关节关节角与液压驱动器行程的映射关系如式(1)和式(2)所示。
肩关节角与液压驱动器行程的关系:
(1)
肘关节角与液压驱动器行程的关系:
(2)
在上肢托举过程中,液压驱动器的铰接点位置相对基础坐标系XBY是随着时间不断变化的,因此可以得到上肢穿戴式弹药托举装置A、C、E、F四个铰接点在任意时刻的位置坐标。
液压驱动器1铰接点A、C坐标:
(3)
液压驱动器2铰接点E、F坐标:
(4)
由此可得液压驱动器1和2在X和Y方向上的位移可表示为
(5)
式中X1=xC-xA,Y1=yC-yA,X2=xF-xE,Y2=yF-yE。
为衡量上肢托举装置的工作能力,在满足液压驱动器长度和肩肘关节变量范围的条件下对上肢托举装置末端弹药夹持器的活动范围进行分析,即在运动学分析的基础上选取G点作为工作空间分析的参考点,求解G点所能达到的空间集合。工作空间的约束条件如式(6)所示。
(6)
对于弹药夹持器参考点G,其所能达到的空间位置集合则应为
(7)

(8)
(9)
(10)
(11)
根据人体上肢关节运动确定设计的上肢穿戴式弹药托举装置的约束条件如表2、表3所示。
表2 液压驱动器长度范围
表3 关节角度范围
已知参数lO1D=350 mm,lO2G=330 mm,lO1B=35 mm,则根据式(7)可求出末端弹药夹持器的工作空间,如图9。
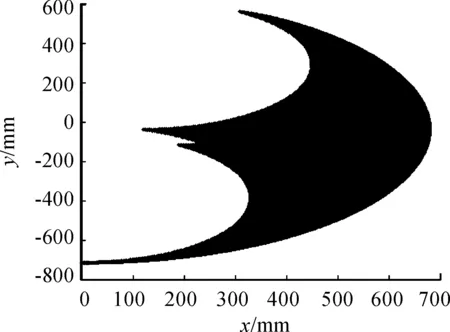
图9 弹药夹持器工作空间
从图9可知,上肢穿戴式弹药托举装置的弹药夹持器的工作空间是一个有缺口的半椭圆形,其运动空间范围x∈[0,680]mm,y∈[-715,565]mm,上肢穿戴式弹药托举装置的运动范围在人体操作范围之内。上肢穿戴式弹药托举装置的工作空间完全可满足托举动作所需的作业空间。
4 机构雅可比矩阵和奇异性分析
根据前述的运动学分析,可得到液压驱动器的伸缩速度为
(12)
末端弹药夹持器的速度为
(13)
机构的输入输出速度关系满足
(14)
式中J2和J1分别为上肢穿戴式弹药托举装置的正逆雅可比矩阵,可表示为
(15)
(16)
由式(15)可知机构的逆雅可比矩阵的行列式不为0,故以正雅可比矩阵为基础,令J2的行列式等于0对机构的奇异位形进行分析,可得
(17)
由式(17)可知,当ξ1=ξ3,ξ2=ξ4时,即C、F点重合。在实际中,由于关节角度和运动副转角的限制,这种奇异位形是可以避免的。
5 仿真分析
上肢穿戴式弹药托举装置的运动学是弹药托举装置路径规划基础,通过运动学求解来实现末端弹药夹持器以特定的姿态沿给定的路径运动,给定轨迹如图10所示。设定末端弹药夹持器的起点坐标为(300,-630),终点坐标为(497,429),上肢穿戴式弹药托举装置末端弹药夹持器从起点到终点进行直线运动。末端弹药夹持器的初始速度,初始加速度设为已知,具体仿真参数值如表4所示。
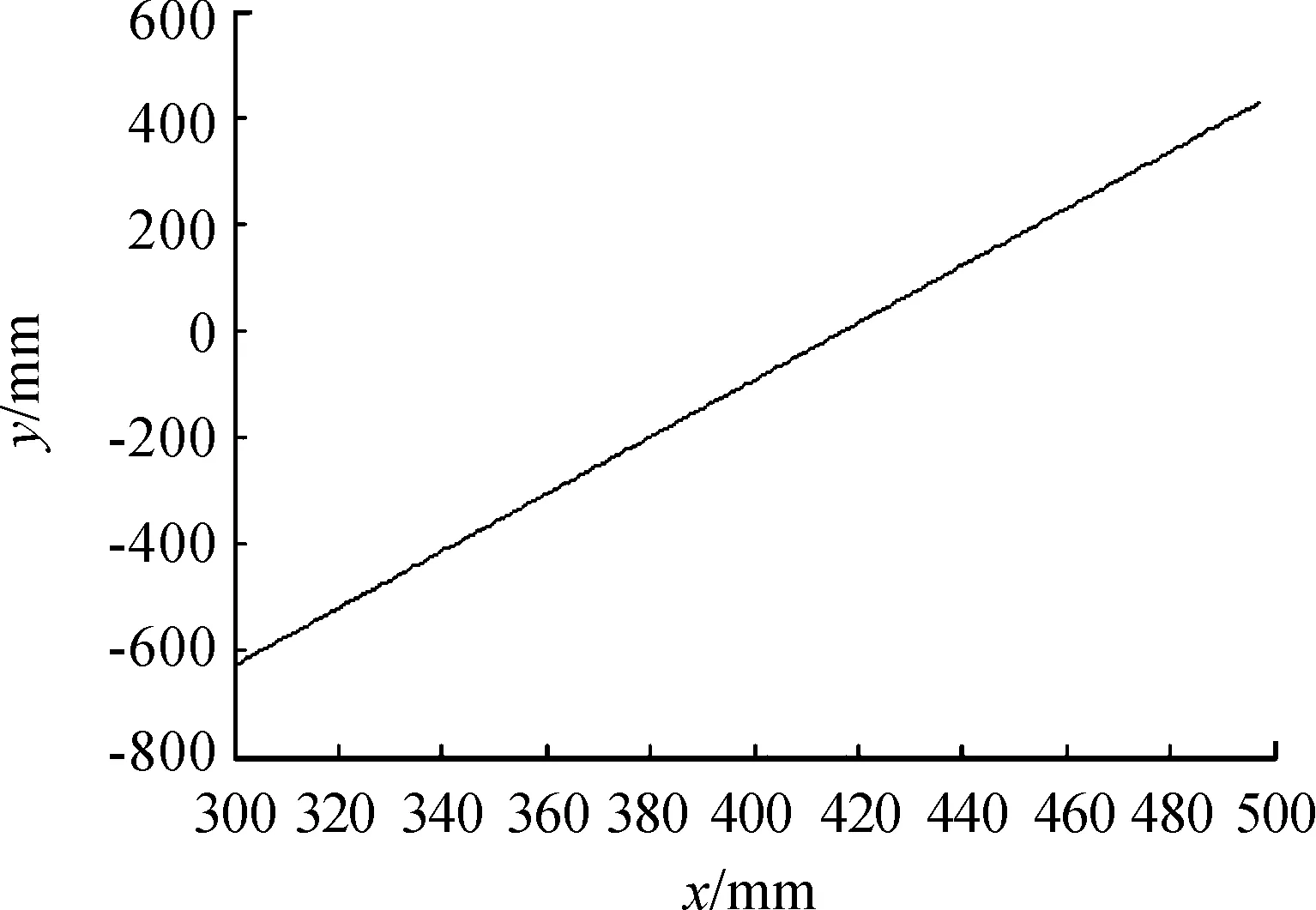
图10 弹药夹持器运动轨迹

参数数值参数数值O1D/mm380O2G/mm330O1B/mm38CD35 mmDE/mm35FG/mm38初始速度/(m·s-1)0初始加速度/(m·s-1)0.54
基于给定轨迹和运动学模型,通过计算绘制出关节角度以及各液压驱动器长度的变化曲线。并采用D-H法求解肩关节和肘关节角度变化轨迹与上述推导结果进行对比分析。具体变化曲线如图11~图16所示。

图11 肩关节角度变化曲线

图12 D-H法肩关节角度变化曲线
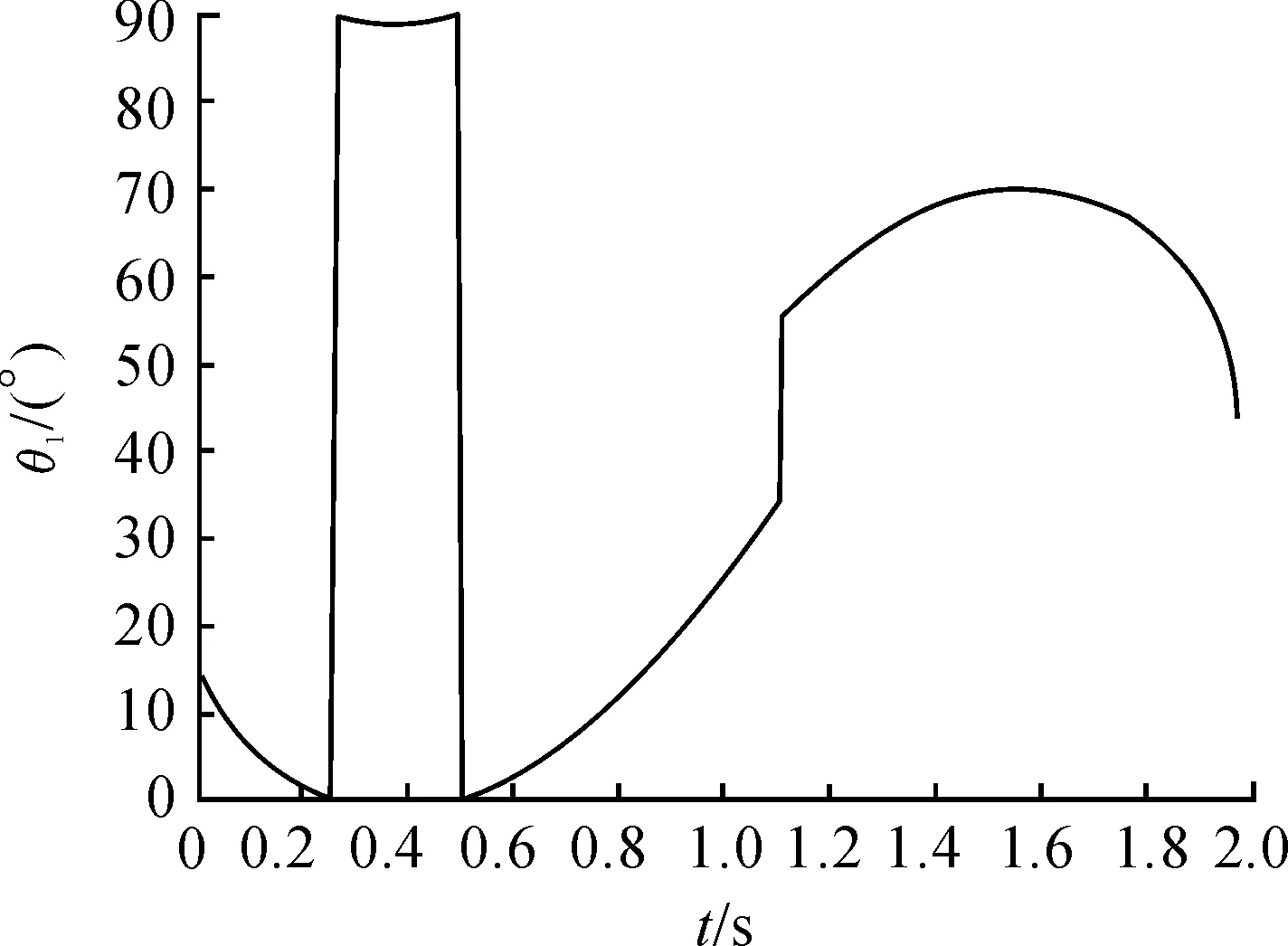
图13 肘关节角度变化曲线

图14 D-H法肘关节角度变化曲线
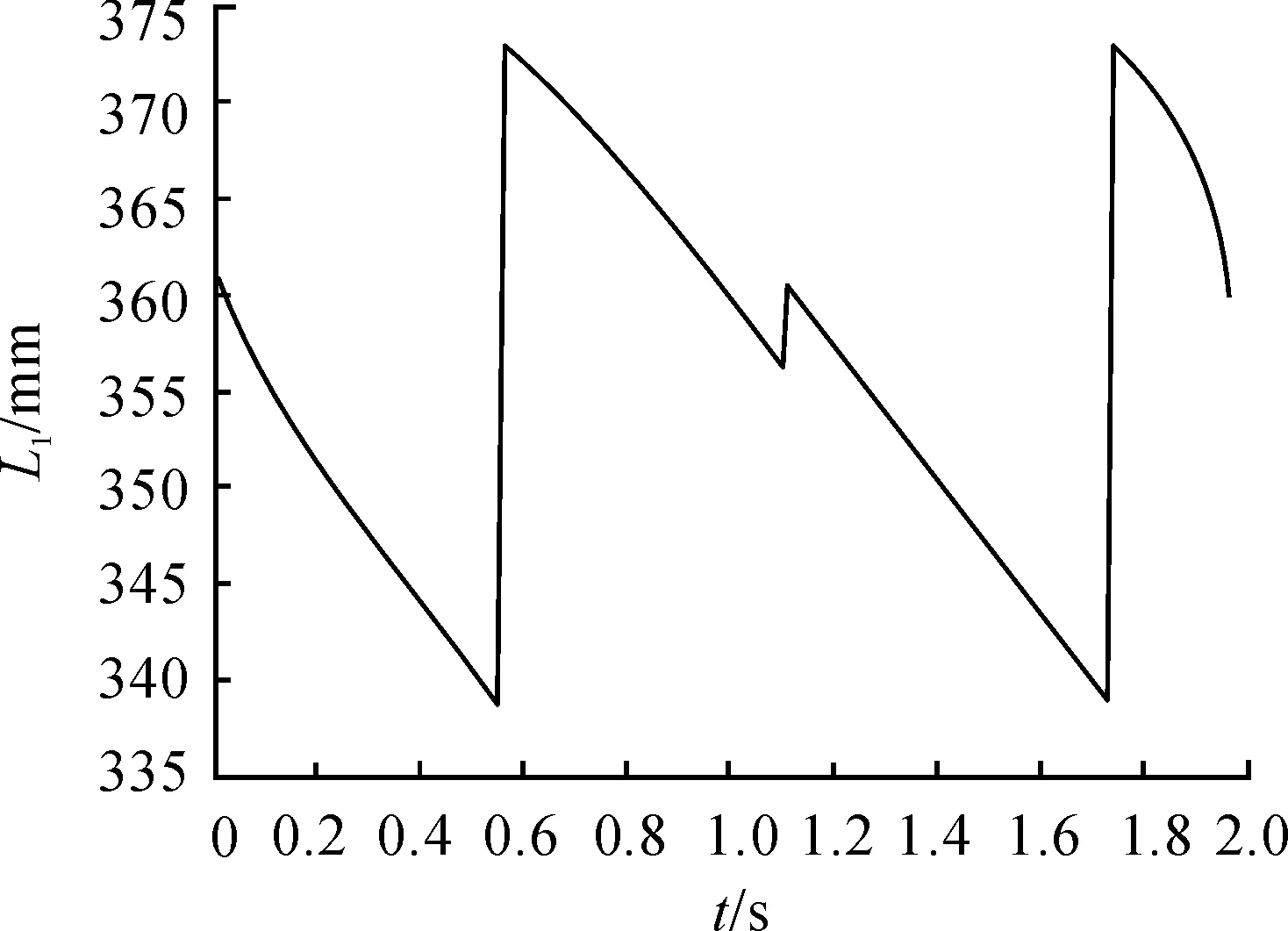
图15 液压驱动器1长度变化曲线
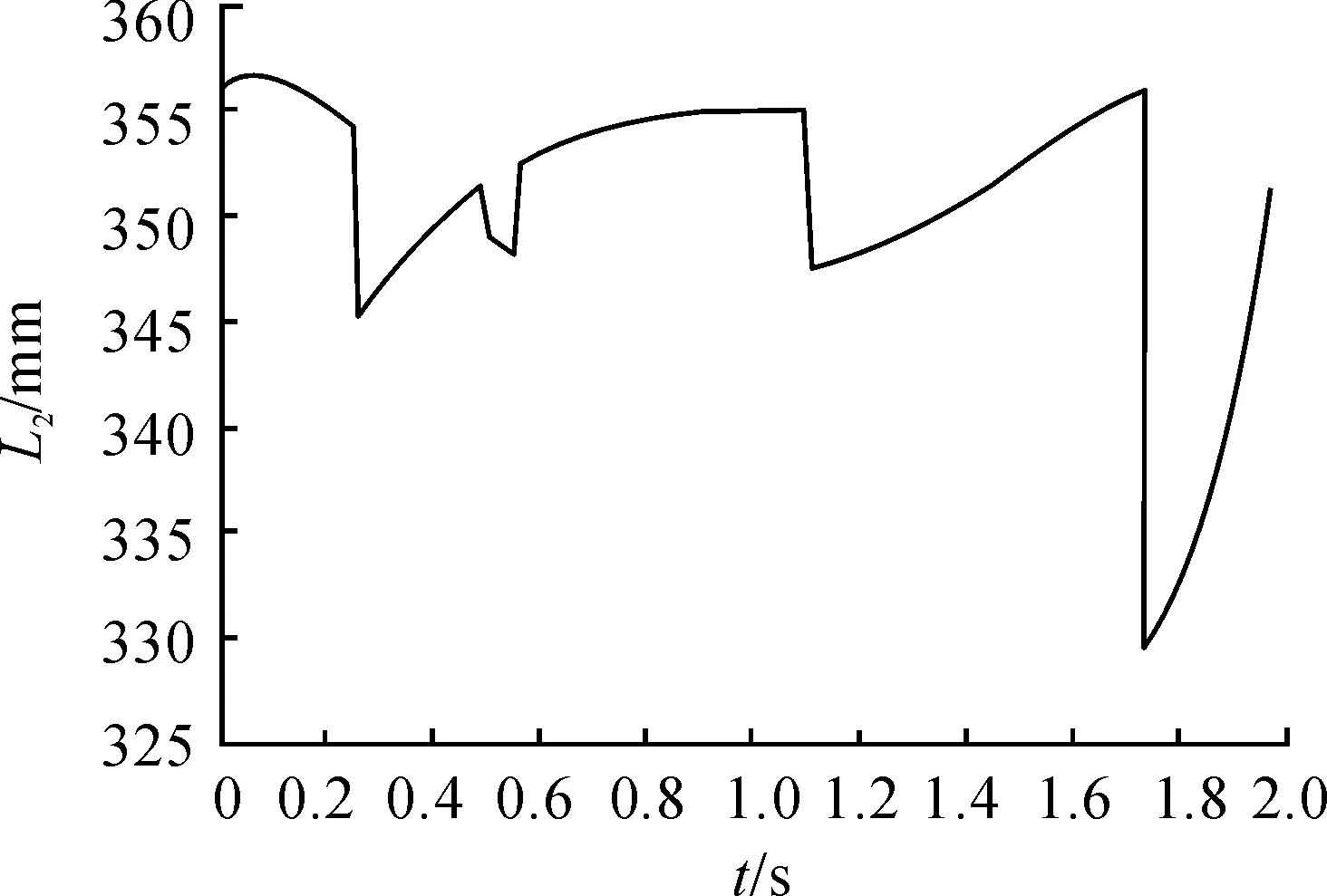
图16 液压驱动器2长度变化曲线
通过轨迹规划来对上肢穿戴式弹药托举机构的运动学进行验证,仿真结果表明液压驱动器长度,关节角度均在约束范围内,符合设计要求。针对设计的弹药托举装置,运用关节坐标相位的变化进行运动学分析,使上肢穿戴式弹药托举装置末端弹药夹持器可以按照设定的轨迹进行运动。通过图11和图12、图13和图14对比得出,采用D-H法得到的肩关节、肘关节角度变化值与采用推导模型求解的轨迹整体趋势相似,且同在约束范围内,但D-H法的结果在轨迹后段差异性较大,对于机构具体轨迹的描述较为模糊。
6 结论
1) 基于Matlab软件对上肢穿戴式弹药托举装置末端弹药夹持器的工作空间进行仿真的结果显示在机构约束范围内该工作空间结构紧凑,没有空洞,具有良好的工作能力。
2) 在任意给定末端直线路径的情况下,采用基于相位关系的运动学模型求解的关节角度、液压驱动器长度变化值均在约束范围内,且比D-H法能够更具体的表明机构的运动状态。