基于飞行弹道的数据链链路分析方法
2019-07-05周国峰韩英宏陈新民迟学谦宋少倩
周国峰,韩英宏,陈新民,迟学谦,宋少倩,赵 曜
(中国运载火箭技术研究院, 北京 100076)
数据链是一种按规定的消息格式和通信协议,实时传输处理格式化数字信息的战术信息系统。弹载数据链技术是从20世纪五六十年代发展至今的信息化技术,随着美国新军事变革思想的提出,在伊拉克战争等现代局部战争中得到了成功使用。数据链技术在战术导弹中的应用日臻完善,同时也被赋予更多的作战使命。基于数据链的飞航导弹在回路可控攻击是信息化条件下未来作战的重要形式[1]。弹载数据链作为当前制导武器发展的主要方向,是现代信息化战争中精确打击的重要基础,除了用于导弹的精确制导外,数据链技术还使导弹具有了诸如目标选择与重瞄、战场杀伤效果评估、多弹协同作战等多重作战任务能力。因此,弹载数据链技术在各国得到了高度重视,并已成为未来导弹向智能化、信息化和网络化发展的关键技术[2-3]。
弹载数据链主要用以帮助导弹完成通讯、指挥、精确制导三方面的功能,负责目标信息、环境信息和协同信息的传递和交换,其组成一般包括发射平台上的数据链舱、控制面板、弹上数据链和遥控测试设备等。弹载数据链是在导弹与导弹,导弹与发射平台,导弹与控制中心之间组网以实现数据交换,或通过其他中继站在导弹之间建立起信息网络,以实现信息的传输交换和处理。弹载数据链的主要功能有:导弹飞行控制、战场协同、数据链网络节点[4]。
美国、俄罗斯、法国等国分别在战斧Block3、战斧Block4、SLAM、AGM-130、JSOW、SS-N-19和Apache-AI等导弹上均应用了数据链[5],显著提高了导弹武器系统的性能。国内目前也在大力发展相关技术的研究应用。
链路余量是指通信时经通信信道衰减后的信号到达接收方时信号强度与噪声比能够满足信息正确检测的容限的富裕程度[6]。本文以导弹与地面站接收机之间的数据链为研究对象,提出了根据飞行弹道数据进行链路余量计算分析的方法。
1 研究对象模型
空基巡航导弹弹道一般分为助推段、爬升段、巡航段和下压段[7],本文以该类导弹为研究对象,弹上安装有发射天线和接收天线,固定在地面上的地面站安装发射天线和接收天线与导弹进行双向数据传输,两者位置关系及信号传输链路示意图如图1所示。
图1 研究对象模型
由于天线的安装位置固定,在飞行过程中随导弹姿态和位置的变化,弹上天线的方向发生变化。为确保接收机能够正常接收到信号,须确保上行链路和下行链路均具备足够的链路余量。
2 坐标系及转换关系
2.1 弹载天线坐标系
坐标原点OMT位于导弹质心,X轴沿导弹纵轴指向弹头,Z轴为天线法线方向,导弹水平放置时垂直向下,Y轴与X轴和Z轴满足右手法则。
2.2 地面天线坐标系
坐标原点OET位于地面站天线质心,X轴从地面站质心指向天,Z轴为天线法线方向,由地面站天线指向落点,Y轴与X轴和Z轴满足右手法则。
2.3 地心坐标系
原点在地心OE处,OEXE在赤道平面内指向某时刻的起始子午线(通常取格林威治天文台所在子午线),OEZE轴垂直于赤道平面指向北极,OEYE满足右手系[8]。
2.4 发射坐标系
坐标原点为发射点o;ox轴:发射点所在的水平面内,指向发射瞄准方向;oy轴:垂直发射点所在的水平面并指向上方;oz轴:通过右手法则确定。
2.5 弹体坐标系
坐标原点为导弹质心o1;o1x1轴:弹体的对称轴,指向头部;o1y1轴:弹体主对称面内,指向上方;o1z1:通过右手定则可以确定。
2.6 地心坐标系与发射坐标系转换
设地球为一椭球,发射点在地球表面的位置可用经度λ0、地理纬度B0来表示,射击方向与过发射点的子午线北切线之夹角为射击方位角A0。从地心坐标系转换到发射坐标系,可用如下转换矩阵:
GE=M2[-(90°+A0)]M1[B0]M3[-(90°-λ0)]=
其中,M1、M2、M3分别代表绕坐标系x轴、y轴、z轴旋转某一角度后对应的坐标转换矩阵,下同。
a11=-sinA0sinλ0-cosA0sinB0cosλ0
a12=sinA0cosλ0-cosA0sinB0sinλ0
a13=cosA0cosB0
a21=cosB0cosλ0
a22=cosB0sinλ0
a23=sinB0
a31=-cosA0sinλ0+sinA0sinB0cosλ0
a32=cosA0cosλ0+sinA0sinB0sinλ0
a33=-sinA0cosB0
若将地球考虑为圆球,只需将上式中B0、A0分别用地心纬度φ0和地心方位角α0代替即可。
2.7 弹体坐标系与发射坐标系转换
这两个坐标系的关系用以反映弹体相对于地面坐标系的姿态。从发射坐标系转换到弹体坐标系,可用如下转换矩阵:
其中:
b11=cosφcosψ
b12=sinφcosψ
b13=-sinψ
b21=cosφsinψsinγ-sinφcosγ
b22=sinφsinψsinγ+cosφcosγ
b23=cosψsinγ
b31=cosφsinψcosγ+sinφsinγ
b32=sinφsinψcosγ-cosφsinγ
b33=cosψcosγ
其中,φ为俯仰角,弹体纵轴在射击平面上的投影与ox轴的夹角,投影在上方为正;ψ为偏航角,弹体轴与射击平面的夹角,在射击平面左侧时为正;γ为滚转角,导弹绕纵体轴旋转的角度,当角速度与o1x1轴方向一致时为正。
2.8 弹体坐标系与弹载天线坐标系转换
从弹体坐标系转换到弹载天线坐标系,可用如下转换矩阵:
3 计算方法
3.1 天线增益计算方法
对设计出来的数据链信号接收机和发射机进行大量试验测试,获得其天线方向图(不同方位的天线增益值)。根据导弹飞行过程中位置和姿态变化,插值计算获得天线实时增益,具体计算流程框图如图2所示。

图2 天线增益计算流程框图
定义链路方向向量由接收天线中心指向发射天线中心。天线增益测试及计算涉及的两个角度定义如下:
Θ为链路方向向量与天线Z轴的空间夹角,范围[0,180°];Φ为链路方向向量在XOMTY平面内的投影,与X轴的夹角,从X轴正向往Y轴正向方向为正,范围[0,360°]。
已知地面站点位为大地纬度φ,大地经度λ,高度H,计算地面站点在地心坐标系的坐标如下:
其中,Rae为地球长半轴,e为第一偏心率平方。
地面站在发射坐标系内坐标为
链路方向向量在发射坐标系内坐标为
其中,XG、YG、ZG为导弹在发射坐标系内的坐标。
链路方向向量在弹体坐标系内坐标为
链路方向向量在弹载天线坐标系内坐标为
链路天线方向角计算如下:
Θ=arccos(ZTL/R)


根据计算出来的Θ、Φ,利用测试得到的天线方向图数据,进行二维插值获得天线的具体增益值。
3.2 链路余量计算方法
根据卫星通信原理[9],在数据链接收机输入端口接收到的信号功率可用如下公式进行计算:
Pin(dBm)=EIRP(dBW)+30-L0(dB)-
Lj(dB)-La(dB)-Lz(dB)+GR(dB)-Ll(dB)
其中,
1)EIRP为发射机的等效各向同性辐射功率,具体计算公式为
EIRP(dBW)=功率放大器输出功率(dBW)-
线缆衰减(dB)+发射天线增益(dB)
其中,功率放大器输出功率根据产品的测试结果获取,线缆衰减根据经验选取,发射天线增益,根据试验获得的天线方向图,结合弹道数据实时计算插值获取。
2)L0为自由空间传输损耗,计算公式为
L0=32.4+20lgR(km)+20lgf(MHz)(dB)
其中:R为通信距离,f为数据链路工作频率。
3)Lj为极化损耗,依据设计经验取值;
4)La为大气损耗,根据不同频段进行取值,如S频段取值1 dB;
5)Lz天线指向误差损耗,取经验值;
6)GR为接收天线增益,根据试验获得的天线方向图,结合弹道数据实时计算插值获取;
7)Ll为接收馈线损耗,取经验值。
在发动机工作时,发动机喷管喷出的火焰中含有等离子体,会对无线电信号产生干扰使信号减弱,因此进行链路计算时需要考虑火焰衰减,本文不考虑此项。
计算出数据链接收机输入端口接收到的信号功率Pin后,减去接收机的灵敏度(产品测量结果),获得链路余量。当链路余量大于设计值时,则认为可以正常接收到数据信号,否则无法正常接收数据链中传输的数据信号。
4 仿真分析
按照本文提出的计算方法,对某典型弹道进行地→弹链路余量计算仿真分析。弹→地链路余量计算方法与此类同。其中,导弹在发射系内坐标和姿态角如下(图3~图10):
图3 X坐标
图4 Y坐标
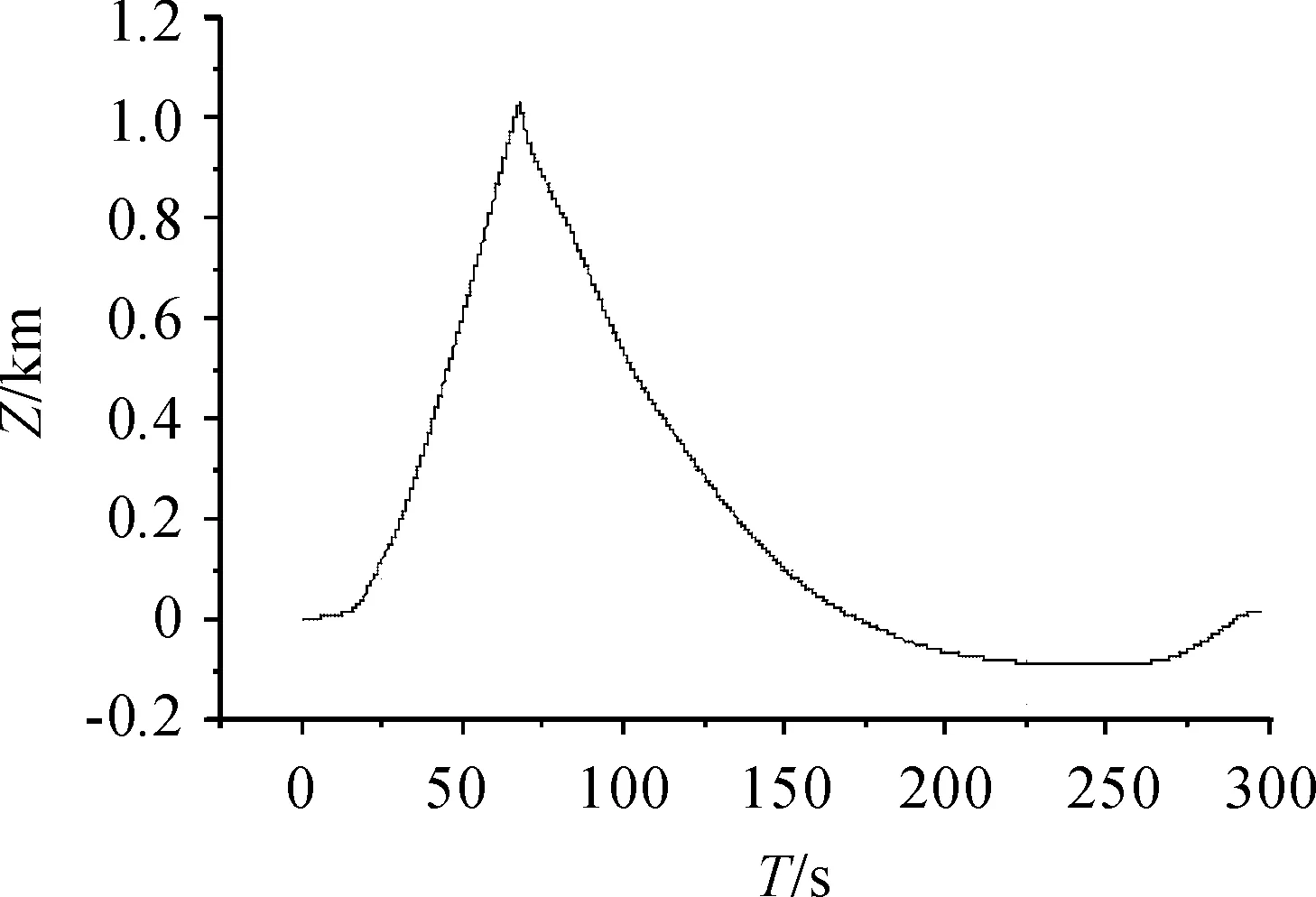
图5 Z坐标
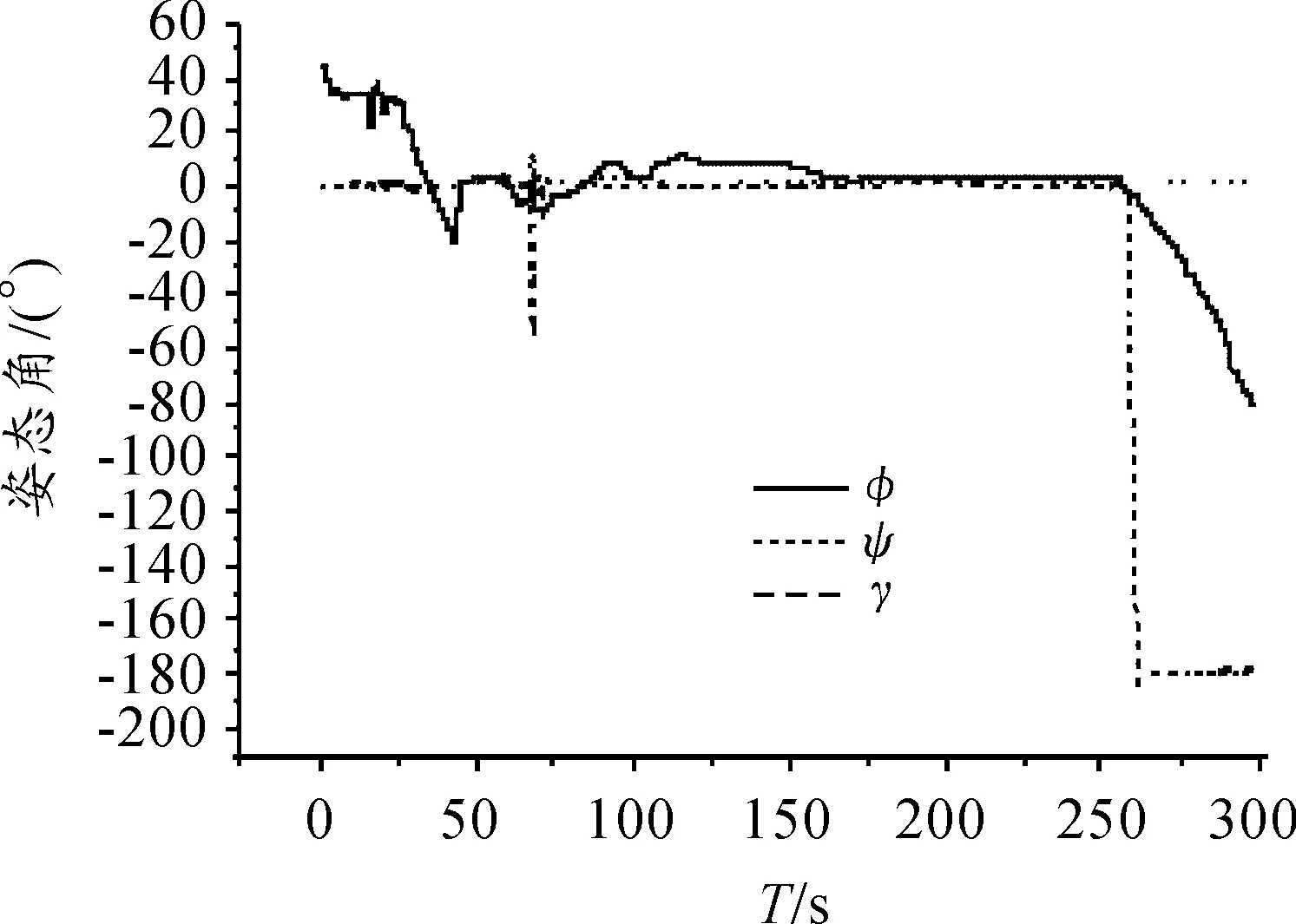
图6 姿态角
链路余量计算结果如下:
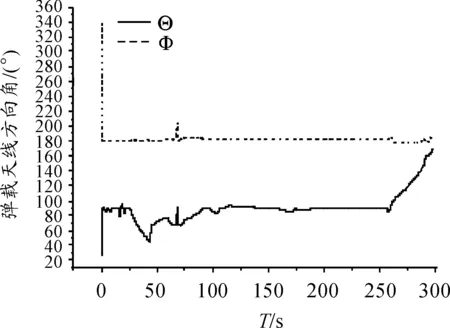
图7 弹载天线方向角
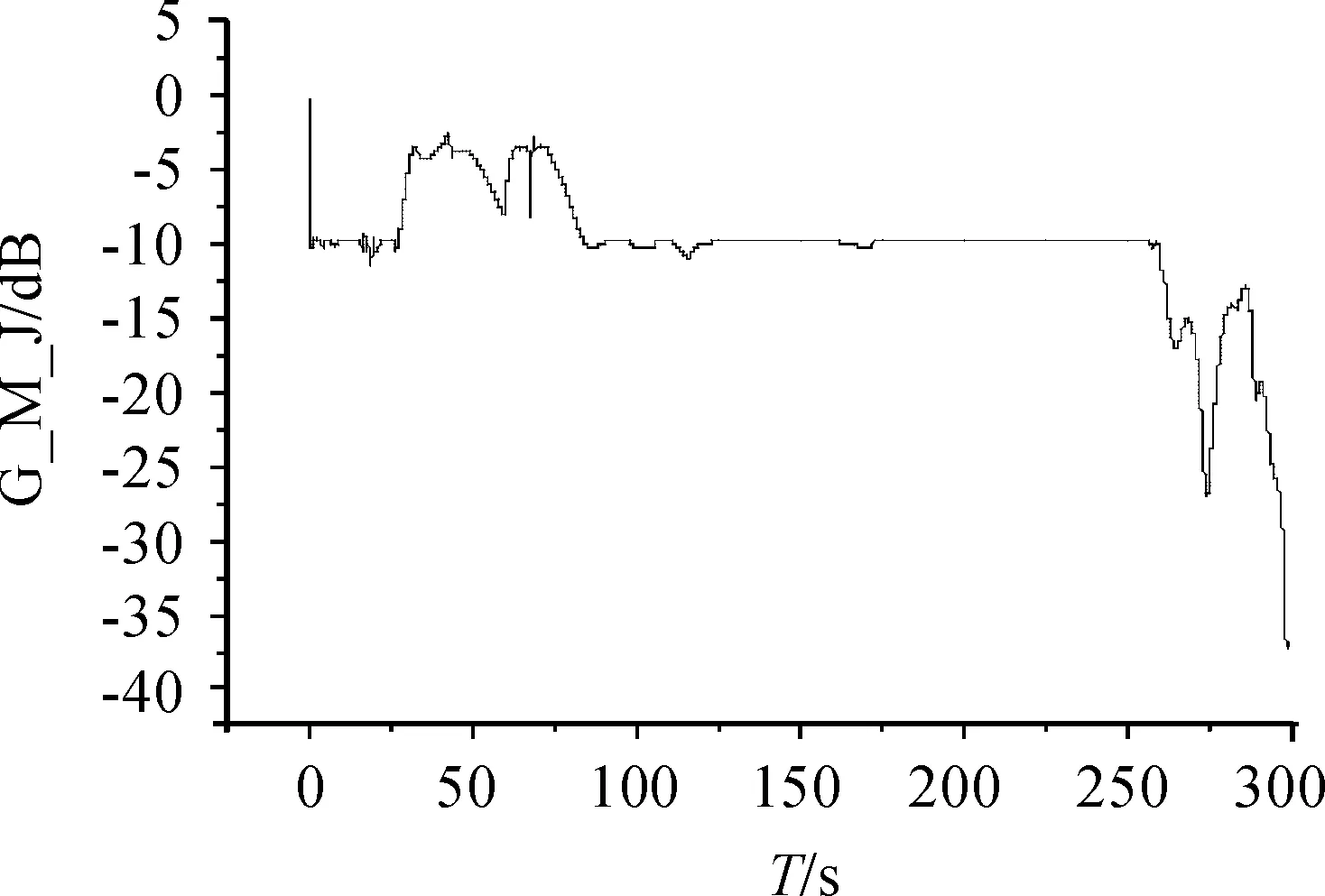
图8 弹载接收机天线增益

图9 地面站发射天线增益
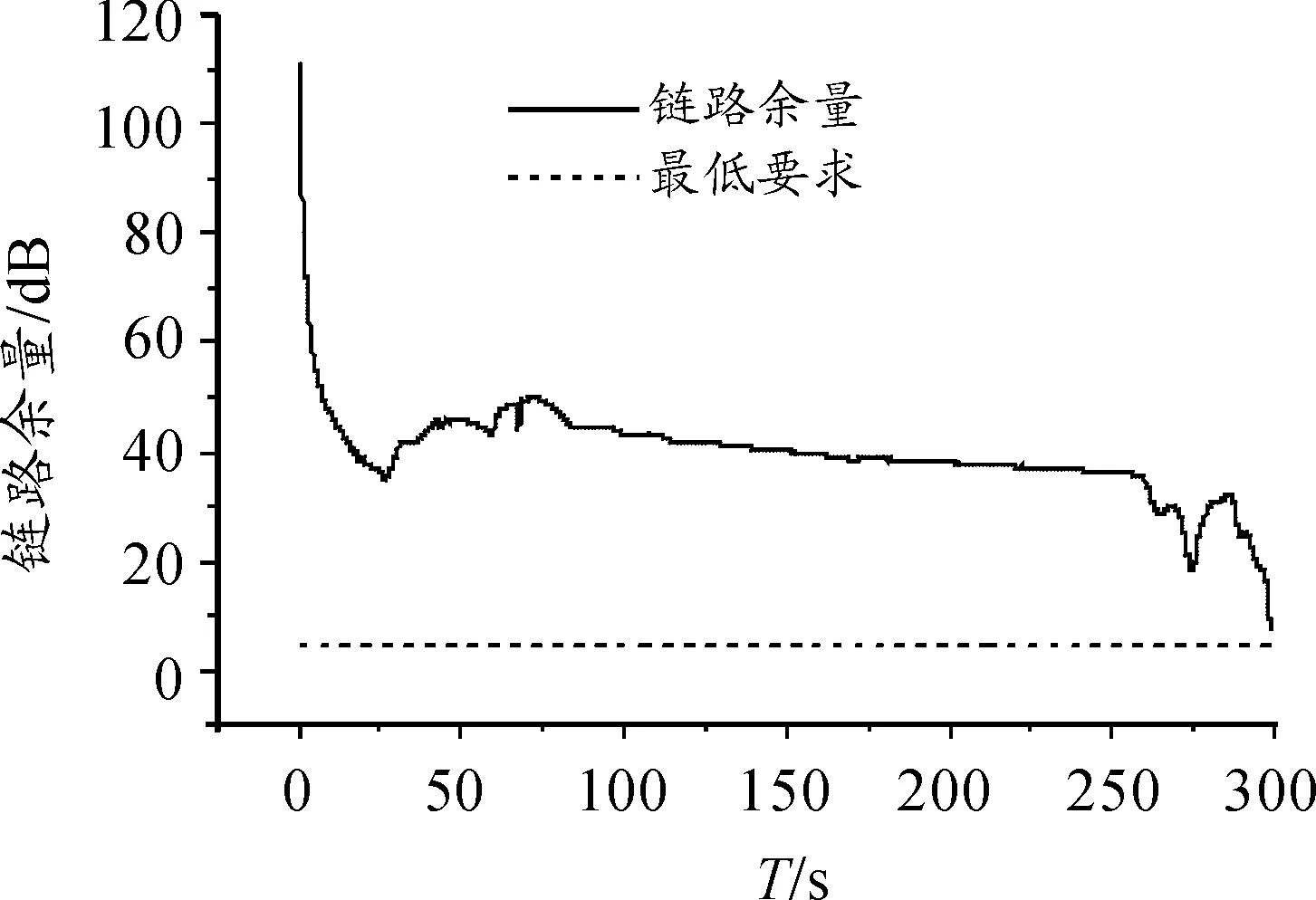
图10 链路余量计算结果
可以看到,若链路余量要求不小于5 dB,则导弹飞行全程均满足要求,即导弹能够全程正常接收到地面站发送的传输信号,但在飞行末端,由于导弹机动,链路余量较小,存在一定的数据传输风险。
5 结论
本文提出了一种天线增益和数据链路余量计算的方法,该方法结合不同研究对象可推导出具体的设计过程,具有通用性。仿真结果表明,设计的方法正确可行,可为工程型号研制提供技术支撑,具有广阔的应用前景。