嫦娥四号着陆点区域高分辨率数字高程模型构建
2019-07-05刘世杰童小华
陈 昊,刘世杰,童小华,胡 明
(同济大学 测绘与地理信息学院,上海 200092)
0 引言
2019年1月3日,我国的嫦娥四号登月探测器成功着陆于冯·卡门撞击坑内,实现了人类历史上首次月背软着陆。冯·卡门撞击坑中心经纬度为(44.8°S,175.9°E),直径约为180 km,位于艾肯盆地内,具有重要的科学研究价值[1]。
月表三维地形的恢复是月球探测的基础研究之一,目前主要利用摄影测量手段对月球影像进行立体匹配生成三维地形,并利用激光测高计数据恢复月表形状[2]。立体匹配需基于高度重叠的影像,但因为月表材质较为均匀,纹理信息缺乏,通过匹配方法往往获取不到足够的匹配点[3]。激光数据生成的DEM(digital elevation model)具有较高的高程精度,但水平方向分辨率较低,因此无法满足对分辨率要求较高的需求,如:着陆区选取、巡视器路径规划等[4]。阴影恢复形状(SFS)理论是基于假设的光照模型和物体表面反射模型建立图像的反射图方程,仅靠单幅影像或多幅影像恢复物体表面像素级地形信息,月表相对简单的地表反照率有利于该技术的实现[5]。
利用单幅影像进行阴影恢复形状(SI-SFS)是SFS进行表面重建的最基本形式,通过反射模型建立三维形状与图像强度之间的关系,然而这种关系仅恢复了表面斜率,而非真实的三维形状。HORN[6]利用单幅影像SFS恢复的斜率生成表面三维形状,如DEM等。这些SFS算法在行星测绘和科学领域也有一定的应用,例如,KRIK和BEYER分别利用SFS法生成DEM,用于美国MER和MSL任务的着陆区分析[7-8]。然而,这些方法仅在小尺度场景下适用。GRUPE等[4,9]将低分辨率的DEM结合到SFS算法中,成功提高了大尺度场景下地形重建的精度。WOODHAM[10]首次提出利用不同光照条件下获取的多幅影像进行阴影恢复形状(MI-SFS)。HEIPKE[11]将MI-SFS运用到地形测绘中,WOHLER等[12-13]进一步研究了其在行星表面三维重建方面的应用。MI-SFS在无纹理区域处给出了合理的结果,在高分辨率表面建模中具有显著的价值[14],Lzu等[15]也研究了MI-SFS与影像间光照差异的关系。
随着月球探测任务越来越多,人类获取的月球遥感影像也越来越丰富。美国月球勘测轨道器(LRO)任务上搭载的窄角相机(NAC)可获得分辨率为0.5~1.5 m/pixel月表高分辨率影像,是目前月球分辨率最高的轨道器影像[16],其拍摄的影像基本覆盖全月球,对月球南北极完全覆盖。LRO上搭载的LOLA数据最高可获取1 024 pixel/(°)全月DEM[2]。中国的嫦娥二号登月探测器可获取7 m分辨率影像,在嫦娥三号着陆区月球虹湾区域可获取1.5 m/pixel高分辨率影像[17],利用7 m分辨率影像生成20 m/pixel全月DEM[18]。日本月亮女神月球探测器的地形相机可获取10 m/pixel的影像[19]。
嫦娥四号着陆器精确着陆位置为(177.588°E,45.457°S)[20],目前还未有公开发表的着陆点附近高分辨率DEM。本文基于月球分辨率最高的LROC NAC影像,分别利用摄影测量法及SFS法生成着陆点附近高分辨率DEM,并对结果进行比对,其中以摄影测量法生成的DEM作为SFS法的初始DEM。本文生成的高分辨率DEM可用于嫦娥四号登月探测器着陆点区域地形地貌分析、着陆区适宜性分析等方面。
1 区域和数据
100 m/pixel WAC GLOBAL MOSAIC影像能对全月球进行覆盖[21],嫦娥四号登月探测器着陆于月球背面冯·卡门撞击坑内,其在WAC GLOBAL MOSAIC上的显示如图1所示。由图可见,冯·卡门撞击坑坑壁比较陡峭,而坑底除中央峰外,其余区域均比较平坦。因此,冯·卡门撞击坑内适合嫦娥四号着陆器进行软着陆及玉兔二号巡视探测。美国LROC NAC影像是目前在嫦娥四号登月探测器着陆区冯·卡门撞击坑区域可获取的分辨率最高的遥感影像,因此本文利用LROC NAC影像对着陆点附近进行高分辨率DEM生成。
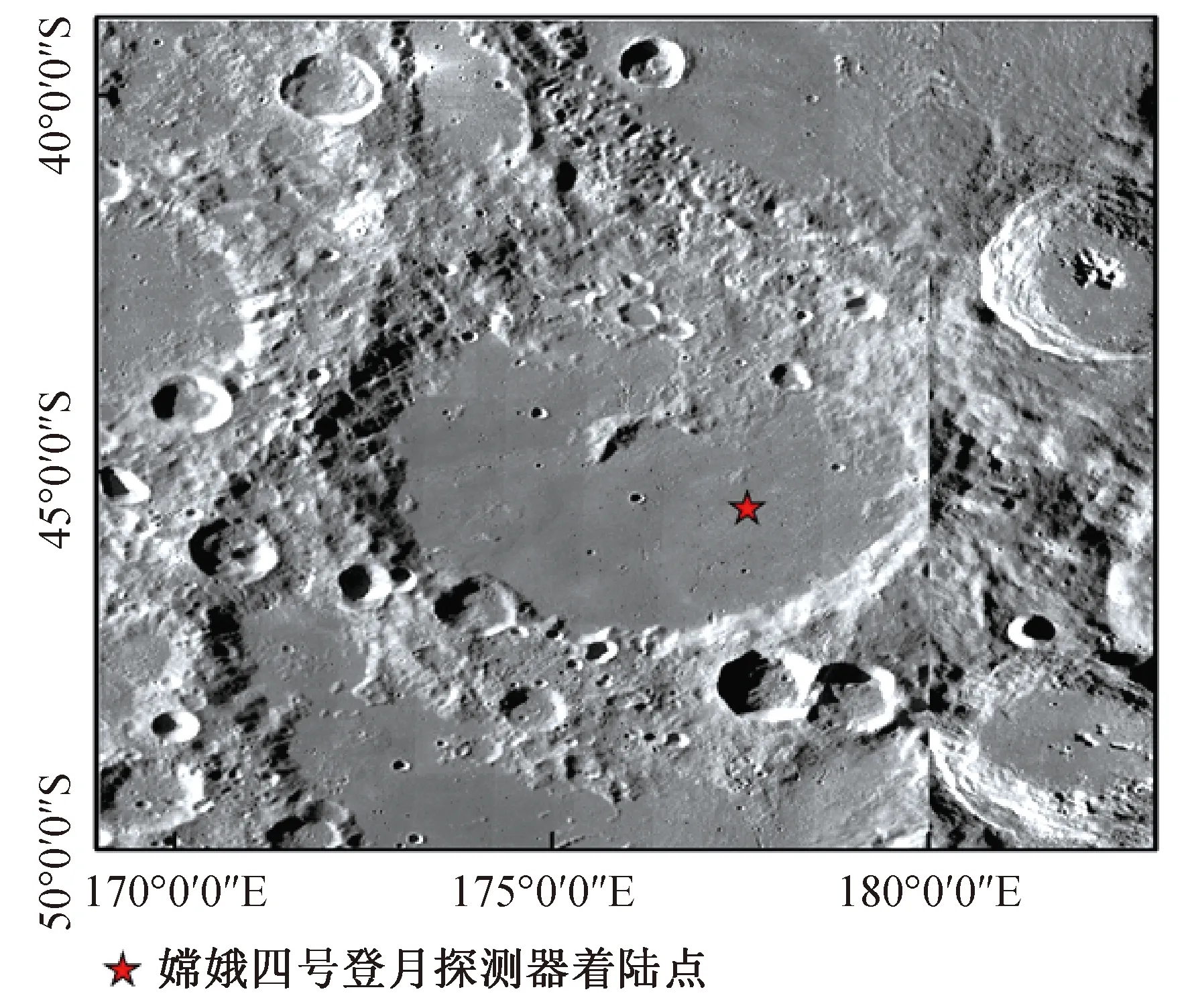
图1 嫦娥四号登月探测器着陆区WAC GLOBAL MOSAIC影像Fig.1 WAC GLOBAL MOSAIC image ofChang’e-4 luner probe landing area
2 DEM生成方法
2.1 摄影测量方法
摄影测量方法发展比较成熟,通常分为3个步骤:1)构建严密几何模型或有理函数模型,对立体影像进行平差,获取更优的影像姿态[22]。2)利用密集匹配进行视差图生成,再通过三角测量生成点云。对于密集匹配,SGM算法的精度与效率均比较好,在行星摄影测量中应用较为广泛[23];3)将点云生成DEM。摄影测量法的核心是密集匹配,对于较少纹理、无光照的阴影区域,密集匹配结果较差。
2.2 阴影恢复形状方法
摄影测量法生成的DEM分辨率为影像的2~3倍,SFS法生成的DEM分辨率可达到像素级。SFS最早由HORN于20世纪70年代提出的1种单幅影像恢复三维信息的方法,自此出现了许多方法[24]。SFS方法可分为4类[25],本文采用最小值法。图像强度和表明形状之间的关系为
In(φ)(x,y)=EnA(x,y)Rn(φ)(x,y)
(1)
式中:(x,y)为像素坐标;φ(x,y)为(x,y)对应的月表实际高程;In(φ)(x,y)是φ(x,y)对应的第n幅图像像素值;En是第n幅图像曝光值;A(x,y)是图像中(x,y)的反照率;Rn(φ)(x,y)是第n幅图像的反射率。Rn(x,y)由月球反射模型构成,主要有Lambertian,Lunar-Lambertian,Hapk模型等[26-28],本文采用Lunar-Lambertian反射模型。
考虑到已知影像强度与由反射模型所确定的物体表面强度之间可能存在误差,将强度方程转化为误差函数的形式,即
∬∑n[In(φ)(x,y)-
EnA(x,y)Rn(φ)(x,y)]2dxdy
(2)
平滑约束主要是避免生成的DEM不连续,通过最小化曲面的二阶导数实现平滑约束,即

(3)

月球的初始DEM一般由摄影测量进行立体匹配生成或LOLA生成,高程方向具有较高的精度。高程约束是保证生成的DEM与初始DEM保持一致性,即
∬[φ(x,y)-φ0(x,y)]2dxdy
(4)
因此,本文进行SFS生成高分辨率DEM除了1幅或多幅影像作为输入外,还应有1个初始DEM作为输入。
SFS的最小化函数为
∬∑n[In(φ)(x,y)-TnA(x,y)Rn(φ)(x,y)]2+
λ[φ(x,y)-φ0(x,y)]2dxdy
(5)
式中:μ是平滑项系数;λ是确定输出的DEM保持与输入地形的接近程度。
3 结果与讨论
利用嫦娥四号登月探测器着陆点附近的两幅影像,通过摄影测量法生成该区域高分辨率DEM,结果如图2所示。生成的DEM分辨率为2.28 m/pixel,其中密集匹配方法采用半全局匹配法。从图2中得出着陆点附近地势较为平坦,但无法精细地展示出地形细节。
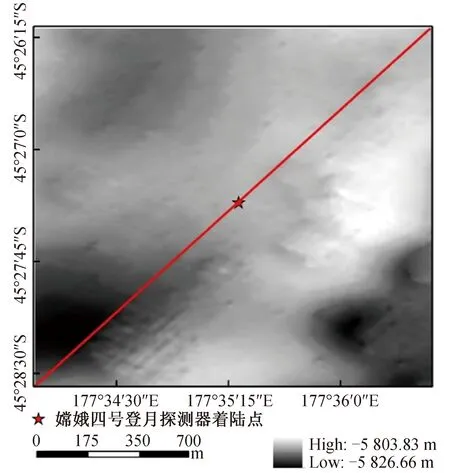
图2 摄影测量法生成2.28 m/pixel DEMFig.2 2.28 m/pixel DEM generated bythe photogrammetry method
摄影测量法生成的DEM分辨率为2.28 m/pixel,而嫦娥四号登月探测器着陆点附近另外1幅LROC NAC影像的分辨率为1.4 m/pixel,本文通过SFS法生成1.5 m/pixel高分辨率DEM。对摄影测量法生成的2.28 m/pixel DEM升采样为1.5 m/pixel,作为SFS法初始DEM。图3为利用单幅LROC NAC影像与初始DEM进行SFS生成的1.5 m/pixel高分辨率DEM。由于着陆点附近的坑均比较浅,摄影测量法生成的2.28 m/pixel DEM无法显示细致的地形信息,因此无法通过视觉从图2中看到嫦娥四号着陆点附近的浅坑。由图3可以看出,SFS生成的1.5 m/pixel DEM能够更好显示地形细节,着陆点附近的浅坑可以明显显示出来。
摄影测量法精度较高,本文以摄影测量法生成的DEM作为参考,对SFS法生成的DEM与摄影测量法生成的DEM进行剖面分析,剖面线见图2中的红线,剖面分析结果见图4。由图可见,SFS法生成的DEM与摄影测量法生成的DEM具有较好的拟合,因此SFS法生成的DEM不仅分辨率更高,而且精度也较高,可将其应用于分辨率要求较高的场景下。
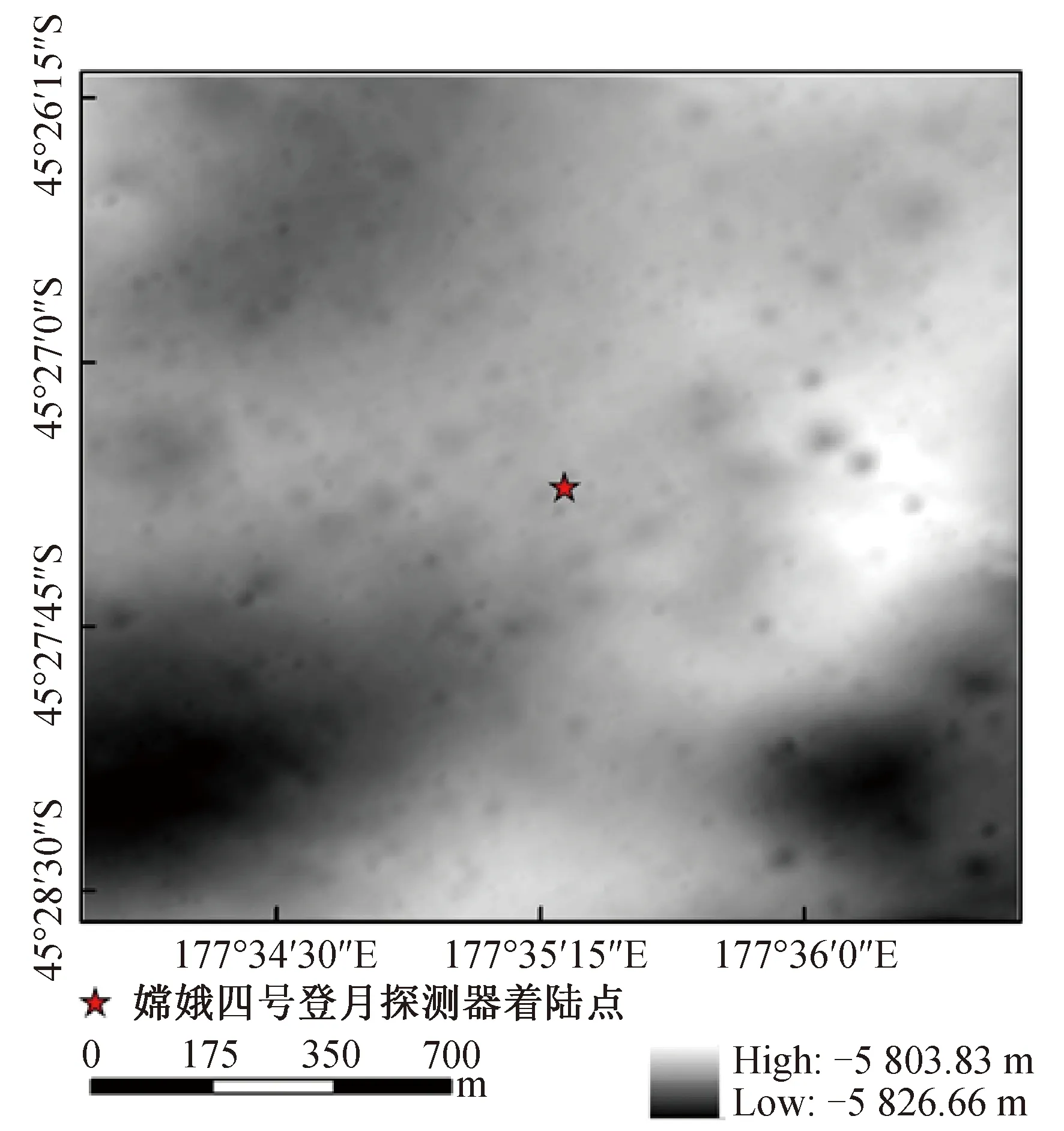
图3 SFS生成1.5 m/pixel DEMFig.3 1.5 m/pixel DEM generated by the SFS
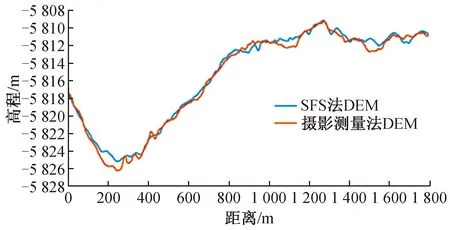
图4 SFS法DEM与摄影测量法DEM剖面分析Fig.4 Profile analysis of SFS DEMand photogrammetry DEM
4 结束语
月表三维地形重建方法有摄影测量法、激光测高法、SFS法三种。其中,摄影测量法和激光测高法比较成熟,但都有相应的缺点。SFS法虽然提出的时间比较晚,发展不成熟,运行效率较低,尚不可实现大范围月表地形重建,但SFS法的优点能很好弥补前2种方法存在的缺点。因此,本文尝试利用SFS法与摄影测量法生成嫦娥四号登月探测器着陆点附近高分辨率DEM,并对生成的结果进行对比。结果表明,SFS法生成的DEM分辨率更高,对地形的显示更加精细,能很好地将着陆点附近的浅坑恢复出来。同时,利用SFS法生成的DEM与摄影测量法生成的DEM具有较好的拟合,表明SFS法生成的DEM精度也比较高。未来将利用SFS法生成的高分辨率DEM,进行嫦娥四号登月探测器着陆点区域地形地貌分析,并对着陆区的适宜性进行评价。由于月球缺乏高精度控制点,本文采用了无控平差。目前LOLA数据生成的DEM高程精度最高,生成的DEM与LOLA DEM在高程方向会有一定偏差,未来在进行平差时可考虑引入LOLA点作为控制点,以保证生成的DEM具有更加准确的精度,且对利用多幅影像进行SFS有一定帮助。