基于模型参考自适应的异步电机转速辨识新方法研究*
2019-07-01江松秦董绍江蔡巍巍张潇汀
江松秦,董绍江,蔡巍巍,胡 宇,王 燕,张潇汀
(1.重庆交通大学 机电与车辆工程学院,重庆 400074;2.大陆汽车研发(重庆)有限公司,重庆 400074;3.重庆电力设计院有限责任公司,重庆 401121)
0 引言
三相异步伺服电动机终端安置速度传感器,使得电机系统成本增加、结构复杂和故障维修困难。无速度传感器矢量控制技术的应用可提升电机系统的鲁棒性及稳定性、降低成本且易于维护,因此在国内外均取得高速发展,其核心问题就是实现对转速和相关电机电气参数的辨识[1-3]。现今较典型的参数辨识方法:如状态观测器法、信号注入法、人工神经网络和模型参考自适应等。基于观测器法[4-5]是把待辨识的电机参数设定为变量与电机模型一同观测,计算量较大;信号注入法[6-7]是向系统注入特殊信号,通过系统响应来实现参数辨识,但会对系统的稳定性产生干扰;人工神经网络法[8-10]较复杂且工程应用性差;模型参考自适应算法[11]是把含有待估算参数的模型设定为可调模型,不含该参数的模型设定为参考模型,且皆输出同一物理量,并将两物理量间的偏差通过自适应结构产生控制信号作用于可调模型来实现参数辨识,其辨识效果较理想,因此应用也更广泛。模型参考自适应法根据模型输出量的不同,主要分为4类:基于转子磁链、基于转子电流、基于反电动势和基于无功功率。
樊杨等[12]提出间接矢量控制转差频率校正方法,保证转子磁场准确定向;韦文祥等[13]提出CESO-MRAS转速辨识方法,解决了纯积分与低速区的压降问题;竺伟等[14]提出一种带定子电阻自校正的MRAS转速估算方法,解决了定子电阻对转速辨识的影响;车浩军等[15]提出引入巴特沃斯滤波器构建改进型无功功率模型参考自适应系统,克服了输入信号中噪声和高频信号对转速辨识的影响。以上方法在一定程度上提高了转速辨识的精度,但其在工程运用上存在局限性,且计算量大。
针对以上问题,本文提出一种基于无功功率模型参考自适应改进的转速辨识方法,即利用反电动势模型参考自适应的定子电阻辨识方法来实时追踪定子电阻因温升、集肤效应等问题影响而变化的情况,并将定子电阻实际数值实时反馈至转子磁链观测器,以消除定子电阻设定值和实际值的偏差对转子磁链的影响,最后把观测出的实际转子磁链输送到可调模型,解决了三相异步伺服电机无速度传感器转速辨识精度低、工程运用受限及计算量大的问题。仿真结果证明了该方法的有效性和可行性。
1 异步电机数学模型
转子磁场定向矢量控制的关键点就是实现转矩与磁通的解耦,即实现电机的电流、电压最终等效的转换在同步旋转坐标系d-p上,规定d轴为磁化轴且与转子磁链势ψr同向,q轴为转矩轴且垂直于ψr。针对三相异步伺服电机urd=urq=0,转子磁场定向下异步电机定、转子绕组电压方程:
(1)
磁链方程:
(2)
根据式(1)、式(2)推导出,转子磁链、转差、转矩式:
(3)
(4)
(5)
2 基于无功功率模型参考自适应的改进型转速辨识新方法
基于无功功率模型参考自适应转速辨识方法基本原理框图,如图1所示。
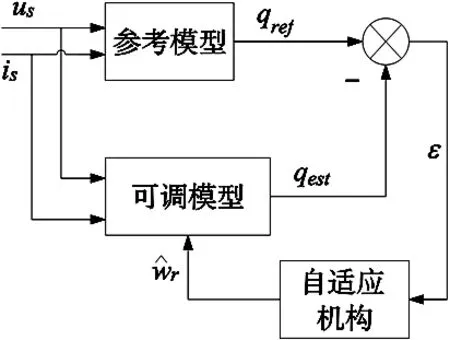
图1 无功功率MRAS转速辨识方法基本原理图

电流可以分解为有功电流和无功电流,且两者有90°相位差。有功电流作用于损耗,无功电流作用于主磁通励磁。定义电机的瞬时无功功率为无功电流和瞬时电压的叉乘,即q=is⊗us,且不同坐标系下无功功率的计算形式不同。理论上,旋转坐标系(d-p)与静止坐标系(α-β)下无功功率的计算结果应该一致,但静止坐标下的电压、电流信号可能含有噪声信号与直流量,在经过坐标变换后噪声信号可被一定程度上消除,且直流量会变得更平稳,因此基于稳态下在同步旋转坐标系下建立模型分析,即参考模型:
qref=usqisd-usdisq
(6)
在同步旋转坐标下,将式(1)~式(4)带入式(6),求出无功功率表达式如下:
(7)
式(7)中ws表示转差,σ为漏感系数,即:
(8)
(9)
式(9)含有转速信息we,且按转子磁场定向时ψrd=Lmisd、ψrq=0、ψrd=ψr,即得到无功率的可调模型:
(10)
依据式(6)及式(10),可知无功功率模型自适应系统的输入为电压量与电流量,输入单一且便于控制。但随着电机系统的运转,定子电阻因温升、集肤效应与磁路饱和等问题影响而发生变化,导致转子磁链的幅值及定向失真,最终影响转速辨识精度。
本文针对以上问题,提出了一种改进的无功功率模型参考自适应的转速辨识新方法。利用反电动势模型参考自适应的定子电阻辨识方法来实时追踪定子电阻参数值的变化情况,并将定子电阻估计值作用于转子磁链观测器,最后把观测出的转子磁链传递至无功功率模型参考自适应的可调模型。
改进型可调模型:
(11)
根据Popov超稳定理论,自适应机构为比例积分(PI)环节。因此对模型输出的无功功率误差直接设计比例积分结构来调节。相应的转速辨识公式为:
(12)
3 基于反电动势模型参考自适应定子电阻辨
识
3.1 定子电阻辨识器
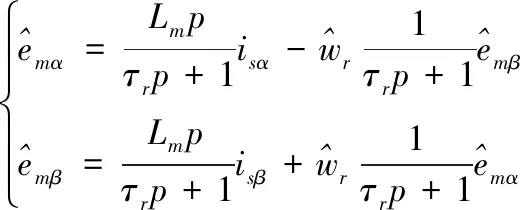
基于坐标变换原理,可由两相静止标系下异步电机磁链电压方程求得反电动势如下式所示:
(13)
此方程含有定子电阻参数且无转速信息,定子电阻因温升问题影响而变化过程较平稳,故以稳态工况考虑,则p=0,故简化的可调模型:
(14)
对磁链电流方程两边同时微分,可求得反电动势的另一表达式:
(15)
(16)
由于定子磁链与定子电阻有关,但计算定子电阻不等于实际阻值,则导致反电动势存在偏差εe,设计合适的自适应规律可以通过闭环控制使得反电动势偏差εe近似为零,估算电阻值近似等于实际值。基于反电动势模型参考自适应定子电阻辨识原理图,如图2所示,图中自适应规律为PI调节器。
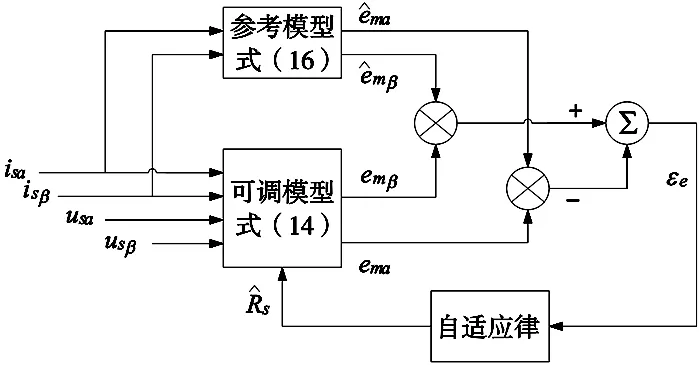
图2 基于反电动势模型参考自适应定子电阻辨识原理图
3.2 改进型转子磁链观测
由式(4)可知,转子磁链与转速存在一定关系,而转子磁场易受定子电阻变动的影响,本文针对转子磁链易受定子电阻变化而被影响问题,提出一种改进型转子磁链观测方法。
文献[16]提出一种转子磁链观测模型,消除了积分初值与直流漂移问题,但是未考虑定子电阻的变化影响。电机运行中,定子绕组的温升严重,电阻阻值随之而变化,从而影响转子磁链。以ΔRs表示定子阻值变化量,由电压方程式即可推导出转子磁链的稳态误差Δψr与ΔRs之间的关系,可以表达为:
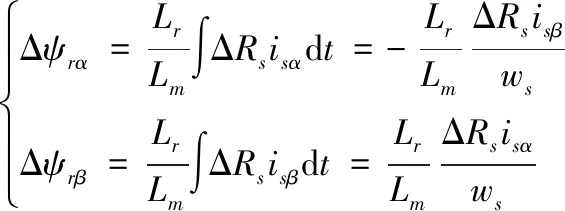
(17)
式中,ws是同步转速;由式(17)可知,Δψr与ΔRs成正比,与转速ws成反比,由此可知在低速工况时,定子电阻将严重影响磁链,最终对可调模型产生干扰。
本文在传统转子磁链观测器,引入定子电阻辨识方法,实时反馈实际定子电阻值,消除定子电阻偏差对转子磁链的影响。如图3所示。
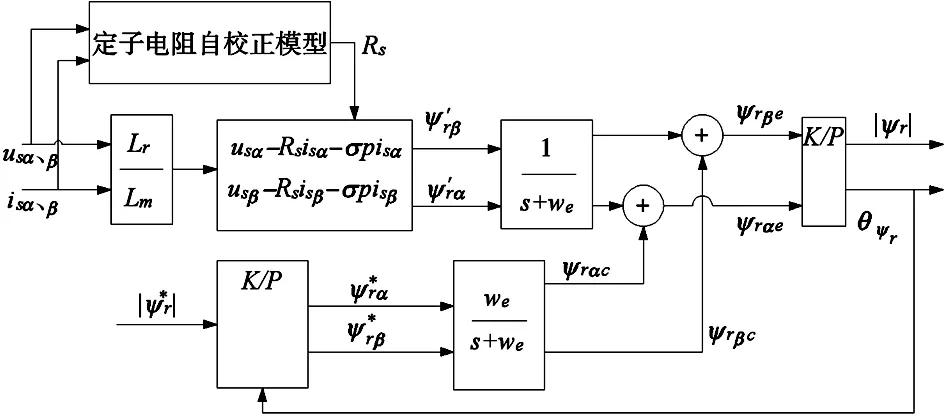
图3 改进型转子磁链原理图
基于改进型无功功率模型参考自适应模型转速辨识新方法原理图,如图4所示。
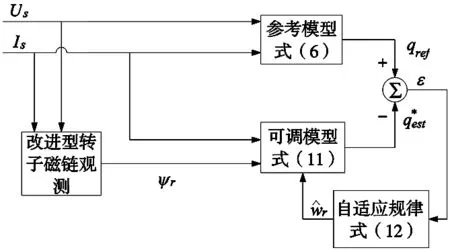
图4 基于改进型无功功率模型参考自适应模型转速
4 仿真验证与结果分析
4.1 仿真系统
本文在Matlab/Simulink平台搭建了基于SVPWM的矢量控制仿真模型验证所提出方法的有效性和正确性。电机的基本参数,如表1所示。
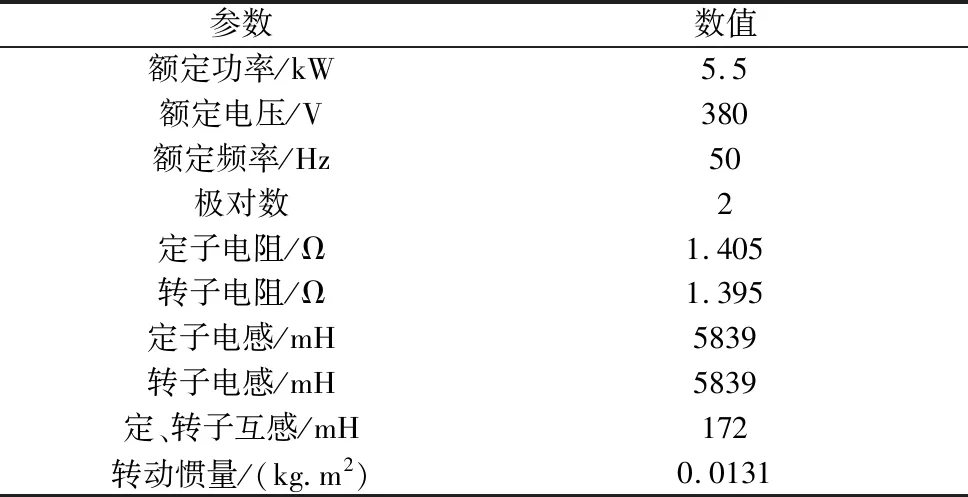
表1 电机模型参数
4.2 仿真结果与研究
通过建模仿真分析,在设定转速初始值为额定转速1450r/min,无负载启动,且在1.2s时加载5N·m,1.7s时卸载工况下,将传统的无功功率模型参考自适应转速辨识与改进型无功功率模型参考自适应转速辨识的仿真结果对比分析,如图5~图7所示,且分别对应转速、转速偏差和转矩响应曲线。
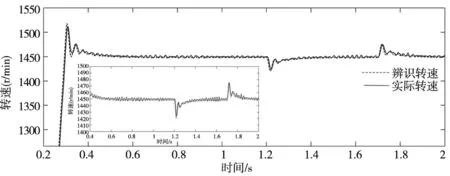
(a) 传统MRAS转速辨识方法的转速辨识曲线
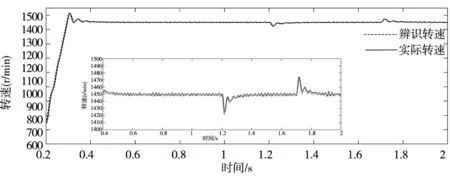
(b) 改进型无功功率MRAS转速辨识新方法的转速辨识曲线 图5 2种方法的转速辨识曲线图
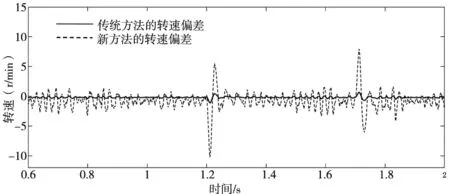
图6 转速偏差曲线
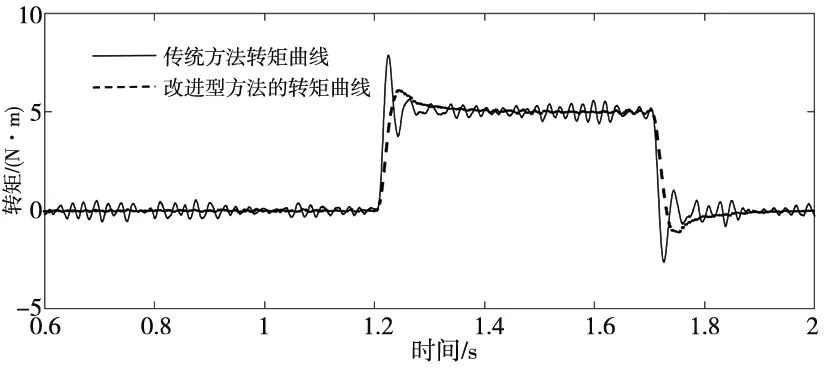
图7 转矩响应曲线
图5分别为传统转速辨识方法与本文所提出方法的转速响应曲线图。仿真结果表明:如图5a所示,电机启动需励磁时间约为0.3s,超调量大,大约需要0.15s才使得转速近似稳定,在负载变化时跳动量约为2.1%且保持系统转速稳定需时0.1s左右,系统鲁棒性较差;如图5b所示,本文提出方法在电机启动时需励磁时间约为0.1s,超调量小,在负载变化时跳动量约为1.3%且保持系统转速稳定需时0.05s左右,系统鲁棒性较好。
图6为传统转速辨识方法与本文所提出方法的转速辨识偏差曲线。如图所示,在1450r/min时,辨识转速与实际转速偏差量较大,平均约为3r/min,在负载变化时偏差量甚至高达10r/min;本文提出的转速辨识新方法,在转速稳定时转速偏差平均约为0.1r/min,且负载波动时最大偏差约为0.2r/min。
图7为传统转速辨识方法与本文所提出方法的转矩响应曲线。传统方法在负载变动时,转矩响应慢需时0.1s,转矩波动较大,约为20%左右;本文提出的转速辨识方法模型在负载变动时,转矩响应快需时0.05s左右,转矩波动较小,约为6%左右。
如图8所示,为本文所提出转速辨识新方法的斜波响应转速曲线,设定初始转速为80r/min,在1.4s时设定转速为-100r/min。由图可知,在低速区估算转速实时跟踪实际转速,转速偏差量约为1%,转速辨识精度高,转速过零出现在1.3s左右,过零后,转速波动依旧小,且至转速平稳大约需时0.2s,结果显示转速估算符合过零性能要求。
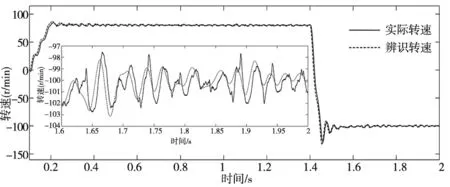
图8 改进型无功功率MRAS转速辨识新方法的斜波响应转速曲线
5 结论
本文提出了一种基于无功功率模型参考自适应改进的转速辨识新方法。该方法采用了基于反电动势模型参考自适应的定子电阻辨识方法来实时追踪定子电阻参数值的变化情况,并将定子电阻估计值作用于转子磁链观测器,以消除定子电阻设定值和实际值的偏差对转子磁链的影响,最后把观测出的转子磁链传递至无功功率模型参考自适应的可调模型,解决了三相异步伺服电机无速度传感器转速辨识精度低问题。仿真结果表明,与传统的无功功率模型参考自适应转速辨识方法相比,本文提出的新方法,在负载波动时,抗干扰能力强,反应快,超调量小;在定子电阻变化明显的中、低速区,转速辨识精度高,辨识偏差不超过2%,且在低速区的转速估算符合要求的过零点性能。
