探究加速度与力质量的关系
2019-06-29赵廷富
赵廷富
(武汉市第三中学 湖北 武汉 430050)
1 使用教材
人民教育出版社出版的高中《物理·必修1》第四章第2节.
2 实验器材
固定有力传感器的数码小车,一端带有滑轮的木板,钩码,细线,DISLab“加速度和力的关系”专用软件.
3 实验改进要点
教材中的实验采用了将钩码的重力大小mg视为细绳的拉力F.这种近似处理只有在一定条件下才成立.设小车的质量为M,钩码的质量为m,理论上有
mg=(M+m)a
小车与钩码共同的加速度大小
而小车受到的合外力
只有当M≫m时,才有F≈mg.
改进一:用力传感器直接测量细绳上的拉力.
本实验通过力传感器,直接测量细绳上的拉力,不需要再做近似处理.将力传感器固定在小车上,拉小车的细绳直接拴在力传感器上,在小车运动的过程中,计算机上给出力F随时间t变化的图像.
改进二:在研究“当小车质量不变时a与F的关系”实验的基础上,对已有数据进行了再利用,从而获得加速度与质量关系的多组数据.
从前面的推导中不难看出,小车质量的改变带来了新的问题,即使钩码质量不变,细绳上的拉力也会发生改变,无法精确地控制每次实验的合外力不变.
具体方案是:在改进一实验中,分发给每个小组的小车质量各不相同,收集5组学生的a-F数据,将其汇总至同一a-F坐标系中,得到5条斜率不同的直线.在图中作一根平行于a轴的直线,与每个图线都有一个交点,就得到了同一合外力下多组a-M数据,由此可以研究当拉力相同时,a和M的定量关系.
4 实验原理/实验设计思路
(1)控制变量法:先保持小车的质量不变,通过改变钩码的个数来改变小车所受的拉力F,测出相应的加速度a;再保持拉力不变,改变小车的质量M,测出相应的加速度.
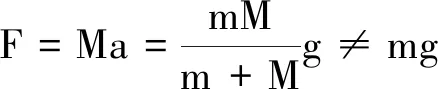
(2)研究a-F关系时,实验装置如图1所示.
图1 研究a-F关系实验装置示意图
将木板轨道垫高,让小车重力沿斜面方向的分力恰好平衡小车所受摩擦力,此时绳子拉力即小车所受合外力.小车在绳子拉力F作用下运动时,力传感器测量小车所受合外力,数码小车测量小车运动的位移,通过无线传输信号的方式,计算机上可同时获得v-t图像和F-t图像,界面如图2所示.选择合适的区域,即可得到相应的a-F数据.

图2 在计算机上获得的v-t和F-t图像
(3)研究a-M关系时,由于无法严格地控制拉力不变,因此选择5组不同质量的情况下a与F的关系数据.在改进一中分发给每个小组的小车质量均不相同,改进二可以采用将第一组实验中5个小组的实验数据进行汇总,在同一张a-F坐标系中将5个不同质量小车的a与F的图像绘制出来.然后在图上作一根平行于纵轴的直线,与5个图线各有一个交点,读出每个交点的纵坐标,即可获得5组相同拉力作用下a与M的数据.
5 实验教学目标
(1)知识与技能
理解加速度与合外力、质量间的定量关系;理解牛顿第二定律的表达式.
(2)过程与方法
在提出猜想、设计实验、搜集证据、分析数据、获得结论的过程中,经历科学探究的一般过程,感悟化曲为直的物理思想方法.
(3)情感态度与价值观
通过实验科学探究过程,养成对待实验严谨、客观的科学态度.
6 实验教学内容
在课堂教学中,将学生分为5个小组,以小组为单位进行实验研究.
(1)控制小车质量M不变,研究a与F的定量关系
1)操作实验:每个实验小组拥有一辆小车,在实验中保持小车质量M不变.
2)收集数据:重复步骤1),做5次实验,获得5组a,F数据,记录在表1中.

表1 a和F数据记录表
3)处理数据:根据上述数据,在如图3所示的a-F坐标系中描点作图.
图3 a-F坐标系
尽管计算机软件界面上可以直接绘制a-F关系图像,但本实验还是请学生将实验数据记录在表格中,学生亲自在坐标纸上描点连线,目的是让学生学会作图的方法.教师这样要求学生,就是培养学生良好的习惯,对学生的未来大有益处.
4)得出结论:根据获得的图像得出物体a与F的定量关系,即a∝F.
(2)控制细绳拉力不变,研究a与M之间的定量关系
为了控制合外力不变,学生提出的实验方案为:保持钩码数量不变,仅改变小车的质量.测得的拉力数据如图4所示.
在上述控制小车质量不变研究a与F的定量关系的实验中,5个小组所用的小车质量各不相同,分别为M1,M2,M3,M4,M5.测得ai和Fi(i=1,2,3,4,5)的值,将5个小组的实验数据进行汇总,如表2所示.

表2 5个不同的小车对应的实验数据
在同一张a-F坐标系中将5个不同质量小车的a与F图像绘制出来,如图5所示.

图5 5个不同的小车对应的a-F图像
请每个小组的学生自行在图5上作一根平行于纵轴的直线,与5个图线各有一个交点,读出每个交点的纵坐标,即可获得5组相同拉力作用下a与M的数据,填入表格3(表3中加速度的数据是取F=1.0 N读出的).
表35组相同拉力作用下的a与M数据
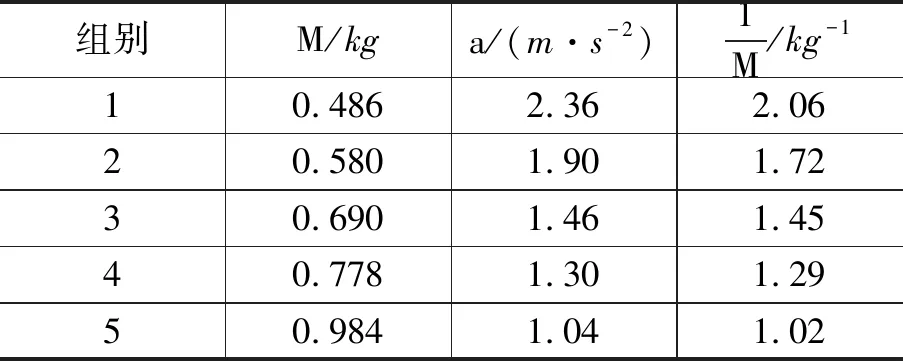
组别M/kga/(m·s-2)1M/kg-110.4862.362.0620.5801.901.7230.6901.461.4540.7781.301.2950.9841.041.02
1)处理数据


图6 用Excel作图
2)得出关系
7 实验教学过程
教学流程图如图7所示.

图7 教学过程流程图
8 实验效果评价
(1)成功之处
1)用力传感器直接测量小车受到的细绳拉力F,避免了将钩码重力G视为细绳拉力带来的系统误差.
2)位移传感器和力传感器的数据同步进入计算机,获得了同一段时间的v-t图像和F-t图像,选择合适的区域,即可得到相应的a-F数据.
3)整合5组实验数据并在此基础上搜集新数据的方法,解决了难以控制细绳拉力不变的问题.
(2)存在的问题
由于细绳存在着弹性,小车运动过程中力传感器测得的细绳拉力有波动,目前采用的处理方法是取一段时间的平均值,若区域选择的不恰当,力的测量就会产生较大的误差.所以期待在技术上或实验方法上能有更好的处理方法.
