高精度随钻成像测井关键技术
2019-06-28路保平倪卫宁
路保平, 倪卫宁
(中国石化石油工程技术研究院,北京 100101)
20世纪八九十年代,随钻测井技术得到了迅速发展,形成了随钻伽马、随钻中子孔隙度、随钻电磁波电阻率和随钻声波等随钻测井技术,不仅随钻测井数据质量不断提高,而且向随钻成像测井方向发展。目前,已经应用的随钻成像测井技术包括伽马成像、电阻率成像、中子密度成像、超声波成像和核磁成像等,其中部分随钻测井技术的数据质量已经接近或达到了相应电缆测井技术的水平,因此随钻测井的时效性和原状地层测量的优势更加明显。
近年来,以随钻伽马成像、随钻电阻率成像和随钻中子密度成像为代表的随钻成像测井技术,其测量精度和分辨率显著提高。以随钻电阻率成像测井技术为例,国外各大油田技术服务公司均研发了随钻电阻率成像测井仪器[1-5],并且随着发展细分为标准成像和高清成像2个序列,如Schlumberger公司的GVR和MicroScope高分辨率随钻侧向电阻率成像测井仪。国内也开始研究随钻成像测井技术,中国石油、中国石化和中国海油都在该领域开展了卓有成效的研究工作,中国石油测井有限公司研制出了随钻侧向电阻率成像测井仪,实现了电阻率成像测量[6]。随着各种非常规油气藏勘探开发的不断深入,对随钻成像测井的清晰度要求越来越高,促进随钻成像测井技术不断向高精度、高分辨率发展。中国石化石油工程技术研究院为了解决随钻地质导向系统距离钻头远、检测信息少等问题,开展了高精度随钻成像测井技术研究,形成了近钻头伽马成像测井技术和高精度随钻电阻率成像测井技术,研制出了近钻头伽马成像测井仪和高精度随钻电阻率成像测井仪,并在现场试验中取得随钻高清测井图像,为复杂油气藏地质导向和随钻地层评价奠定了坚实的基础。
1 高精度近钻头伽马成像测井技术
大斜度井、水平井钻井技术是油气勘探开发实现“少井高产”目标的主要技术手段[7-8],而高精度近钻头伽马成像测井(简称近钻头伽马成像测井)技术能够直观地获取丰富的地层信息。近钻头伽马成像测井是将测量传感器直接安装在钻头上方,钻进过程中实时扫描探测钻遇地层的放射性强度,并监测井斜与方位的变化,根据测井数据判识钻遇地层岩性和渗透层、探测地层边界、计算地层倾角和厚度、控制井眼轨迹等,以指导钻进和评价储层,提高大斜度井、水平井的钻井速度。相比于常规随钻伽马测井,近钻头伽马成像测井获取的地层信息更加真实、及时和精细,并且测量盲区小,能显著提高优质储层的钻遇率。
1.1 近钻头伽马成像方法
地层岩石中含天然放射性核素(铀系、钍系、钾),其衰变时产生不同能量的伽马射线。地层岩石的自然伽马放射性主要由铀、钍和钾的含量确定。自然伽马测井是利用伽马射线探测器测量地层的总放射性强度[9]。与自然伽马测井原理相似,近钻头伽马成像测井的伽马探测器和磁传感器安装在钻头附近的钻铤表面侧向开槽内,并在周边安装屏蔽体,定向探测地层中某一扇区内总的自然伽马射线强度(见图1),随着井下钻具的旋转扫描可以获取全井眼不同方位扇区地层的伽马成像图。
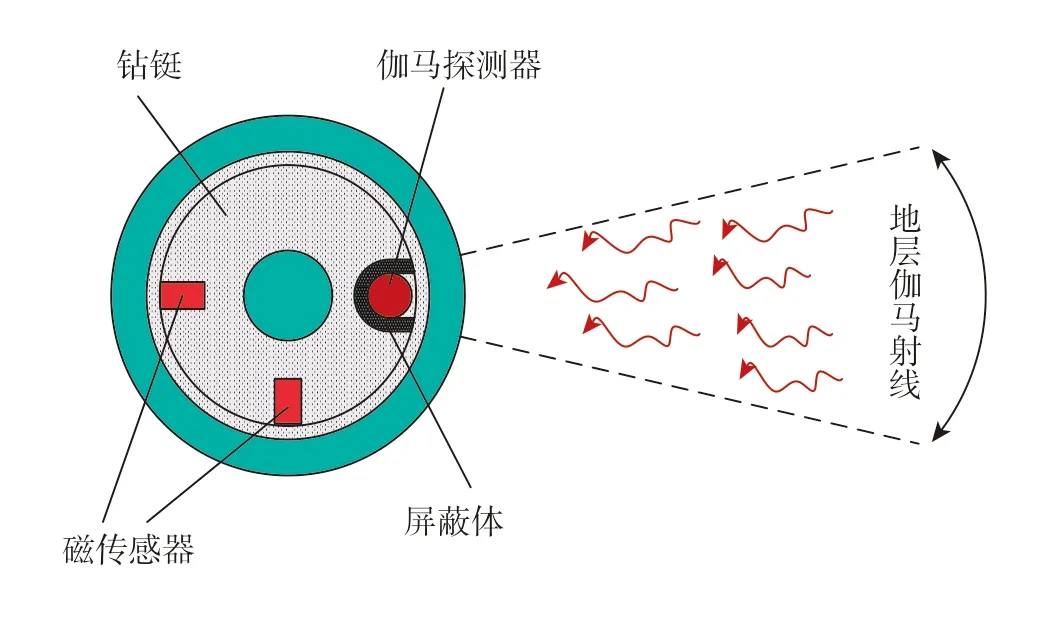
图1 近钻头伽马测量原理Fig.1 Principle of near-bit gamma measurement
地层岩石中天然放射性物质产生的伽马射线通过钻铤侧向开窗进入伽马射线探测器后,与NaI晶体发生光电效应、康普顿效应和电子对效应,产生荧光,光电倍增管和协同电子线路将荧光转变为电信号。常规随钻伽马测井仪是将电信号转化为钻井液脉冲信号传输至地面进行处理,再将处理后的钻井液脉冲信号转化为所测地层的放射性强度。近钻头伽马成像测井仪是将电磁信号数字化并记录下来,通过无线短传方式上传给遥传系统,再由遥传系统传输至地面,进行成像处理,实现近钻头地面实时成像、井下大容量存储等功能。钻井过程中,近钻头伽马成像测井仪实时测量不同方位的自然伽马放射性强度(见图2),根据测量的伽马放射性强度进行多扇区精细成像。由于受到随钻传输系统即钻井液脉冲器传输能力的限制,并不是将全部扇区的伽马成像值都传输到地面,只是将扇区中最上方和最下方的伽马值传输到地面。一般将扇区中最上方的伽马测量值简称为“上伽马”,最下方的伽马测量值简称为“下伽马”。地质导向技术就是根据上、下伽马值判断钻头在地层中的位置,通过成像信息来预测井眼相对倾角的变化趋势,从而及时调整钻头前进方向,实现在油藏最佳位置钻进[10-12],提高储层钻遇率。
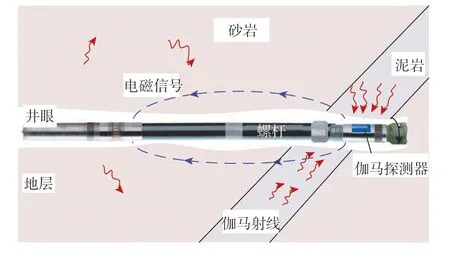
图2 近钻头伽马成像测井示意Fig.2 Schematic diagram of near-bit gamma imaging logging
1.2 近钻头伽马成像测井仪井下电子系统
近钻头伽马成像测井仪井下电子系统由近钻头下短节和近钻头上短节组成,如图3所示。近钻头下短节直接在钻头上方,是井下电子系统的主电子仓,内有伽马探测器、X /Y磁传感器、发射天线、数据采集及控制模块、大容量存储电路、脉冲放大整形电路和电磁发射编码电路等元器件,构成了井下无线电磁短传通讯的发射电路,能够实时测量钻头附近0.60 m以内的地层方位伽马值、井斜角/方位角、钻头转速等地质参数和工程参数,并通过无线电磁信号将测量数据上传至近钻头上短节。近钻头上短节内为井下无线电磁短传通讯的接收电路,其由接收天线、放大滤波电路、数据采集控制电路、接收解码电路和仪器通讯总线等构成。近钻头上短节配接在螺杆钻具上部、传统MWD/LWD仪器下部,接收近钻头下短节发射的电磁信号,同时将所有测量数据通过井下专用仪器总线传输至遥传系统。近钻头上、下短节中的接收、发射天线及相应的电子线路构成了井下无线电磁短传通讯系统,实现上、下两短节间跨螺杆钻具的通讯,通过无线电磁信号将钻头测量数据发送至遥传系统,再通过遥传系统(如MWD)将近钻头测量数据上传至地面进行精细成像处理。
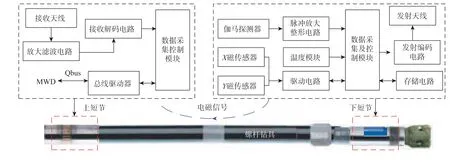
图3 近钻头伽马成像井下电子系统Fig.3 Electronic system of downhole near-bit gamma imaging tool
1.3 近钻头伽马成像采集方法
近钻头伽马成像测井仪通过在不同方位布置伽马探测器,利用伽马探测器的定向探测特性实现方位测量。采用理论分析、模拟优化等手段,研制了近钻头伽马探测器,其方位探测特性曲线如图4所示。由图4可以看出,从-180°到180°方位积分几何因子是逐渐增大的;当方位积分几何因子取0.8时,几何因子扫射的方位角宽度约45°,表明伽马探测器的方位分辨率可达到45°。以上分析说明,近钻头伽马成像测井仪能很好地分辨16扇区的地层,具有非常高的成像精度。
与非放射性测井不同,近钻头伽马成像测井数据的采集具有非瞬时性的特点,需要进行一定的时间累积才能测量得到有效的伽马数据。近钻头伽马探测器具有方位探测特性,在钻进过程中随钻头旋转采集不同扇区内的伽马总计数,实现方位伽马成像测量[13-14]。近钻头伽马成像测井数据采集方法如下:
1)将井眼(360°)平均划分为N个扇区(如4、8、16或32),如图5所示,各扇区对应角度区间为[360(n-1)/N,360n/N],(n=1,2, ,N)。
2)采用2个磁传感器实时测量钻具旋转角度θ,并用实时时钟记录测量时间t。
3)每旋转一周,当θ为扇区边界角度时,记录此时的时间t0,t1, ,tN,再计算每个扇区对应的测量时间t1-t0,t2-t1, ,tN-tN-1。
4)在总的测量时间内,累加旋转过程中记录的每个扇区对应的测量时间T1,T2, ,TN,即地层扇区的累计测量时间。
5)磁传感器在测量的同时记录伽马脉冲响应,当采集到1个伽马脉冲时,记录此时钻具旋转的角度θt,判别θt对应的扇区nt,此时nt扇区对应的伽马计数值为Cn+1。
6)当测量结束时,累计得到各扇区伽马计数序列C1,C2, ,CN。
7)计算扇区对应的伽马计数率,扇区对应的伽马计数率Gn=Cn/Tn。

图4 近钻头伽马探测器的方位探测特性曲线Fig.4 Azimuth detection characteristic curve of the nearbit gamma detector
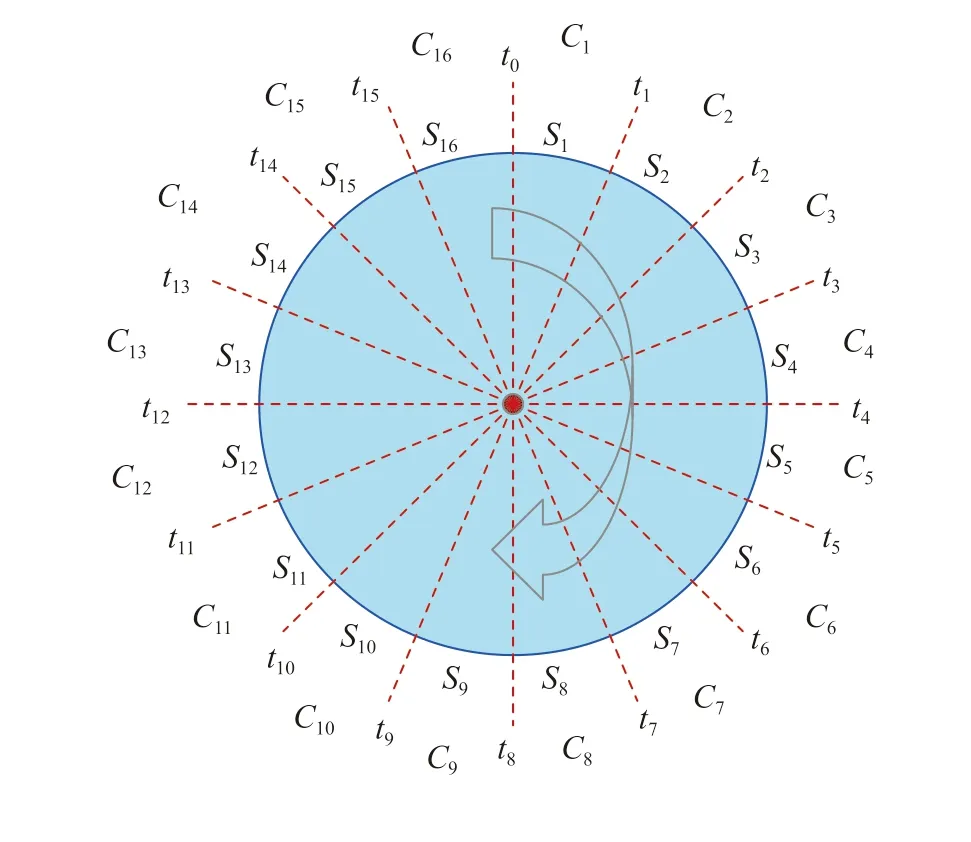
图5 近钻头伽马成像测井16扇区示意Fig.5 Schematic diagram of 16 sectors near-bit gamma imaging logging
2 高精度随钻电阻率成像测井技术
根据随钻电阻率成像测井仪器提供的高分辨率井壁图像,可以清晰地判断裂缝、孔洞等地质特征,实现评价地层和实时地质导向[15-18],在利用水平井开发油气田中发挥着重要的作用。它不仅可以提供上下、左右方向的测量数据,而且可以通过测井仪的旋转来实现全井眼的电阻率成像,测井仪带有纽扣式的电阻率测量电极,当测井仪旋转一周后,就能够获得全井眼的成像资料,并通过数据处理系统在成像图上拾取地层倾角,从而为导向钻进过程中判断地层倾角提供依据。基于上述基本原理,研制了成像精度达到10 mm、扇区分辨率达到128扇区的高精度随钻电阻率成像测井仪。
2.1 随钻电阻率成像测井仪基本组成及电子系统总体设计
随钻电阻率成像测井仪的结构如图6所示,上、下2个发射螺绕环构成发射电极系,中间3个接收纽扣电极构成接收电极系。上、下2个发射螺绕环对称分布,安装在钻铤表面的凹槽内。3个接收纽扣分布在钻铤中间的一个圆周上,间隔120°。随钻电阻率成像测井仪的核心部分是电子系统。电子系统包含电阻率快速测量电子系统和动态工具面检测系统。
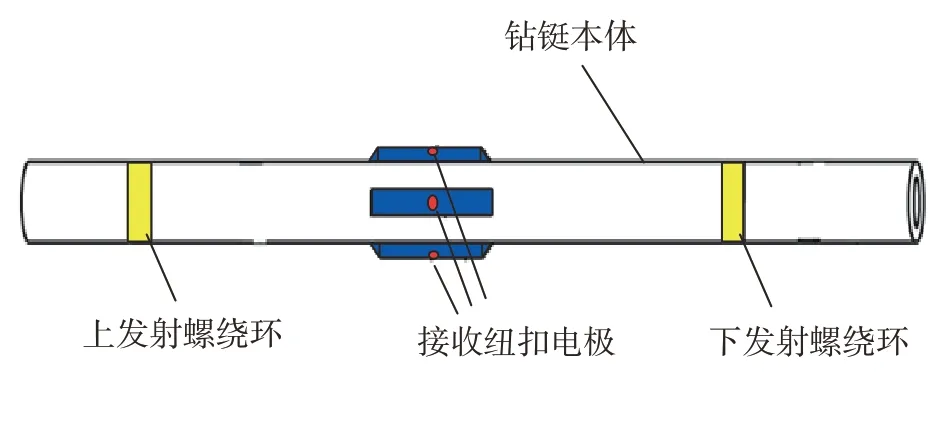
图6 随钻电阻率成像测井仪结构示意Fig.6 Structural map of resistivity imaging LWD system
发射电极系位于仪器两端,上、下2个发射螺绕环呈对称分布,可以形成较好的聚焦电流进入地层,提高探测深度和探测精度;发射电极系较大,套在钻铤上,外面有特殊保护结构,可设多对电极系,以获得多个深度的探测结果,分析不同深度地层对测量结果的影响。发射电极系工作时,发射控制单元发射低能量波。发射电极系的2个发射螺绕环距离较远,为了提高信号发射功率,调谐模块安装在尽量靠近发射螺绕环的位置上,以减少连接线较长带来的能量损耗。由于调谐模块与发射螺绕环的距离较近,更容易调整发射信号频率和控制带宽。
接收电极系位于发射电极系正中间。接收电极直径较小,也称为纽扣电极,通常安装在钻铤外壁凸出的部分(稳定器)上,使其更靠近地层,以提高测量效果。接收电极系工作时,纽扣电极将采集的来自地层的微弱电信号经过前置放大滤波模块(尽量靠近接收纽扣电极)进行放大滤波,以便检波采集模块将其数字化。电阻率测量单元选择不同方位钮扣电极的测量值,检波采集电路将放大滤波后的电信号数字化,并将其传送至电阻率测量单元进行处理。
电子系统位于钻铤短节上,其总体功能如图7所示。
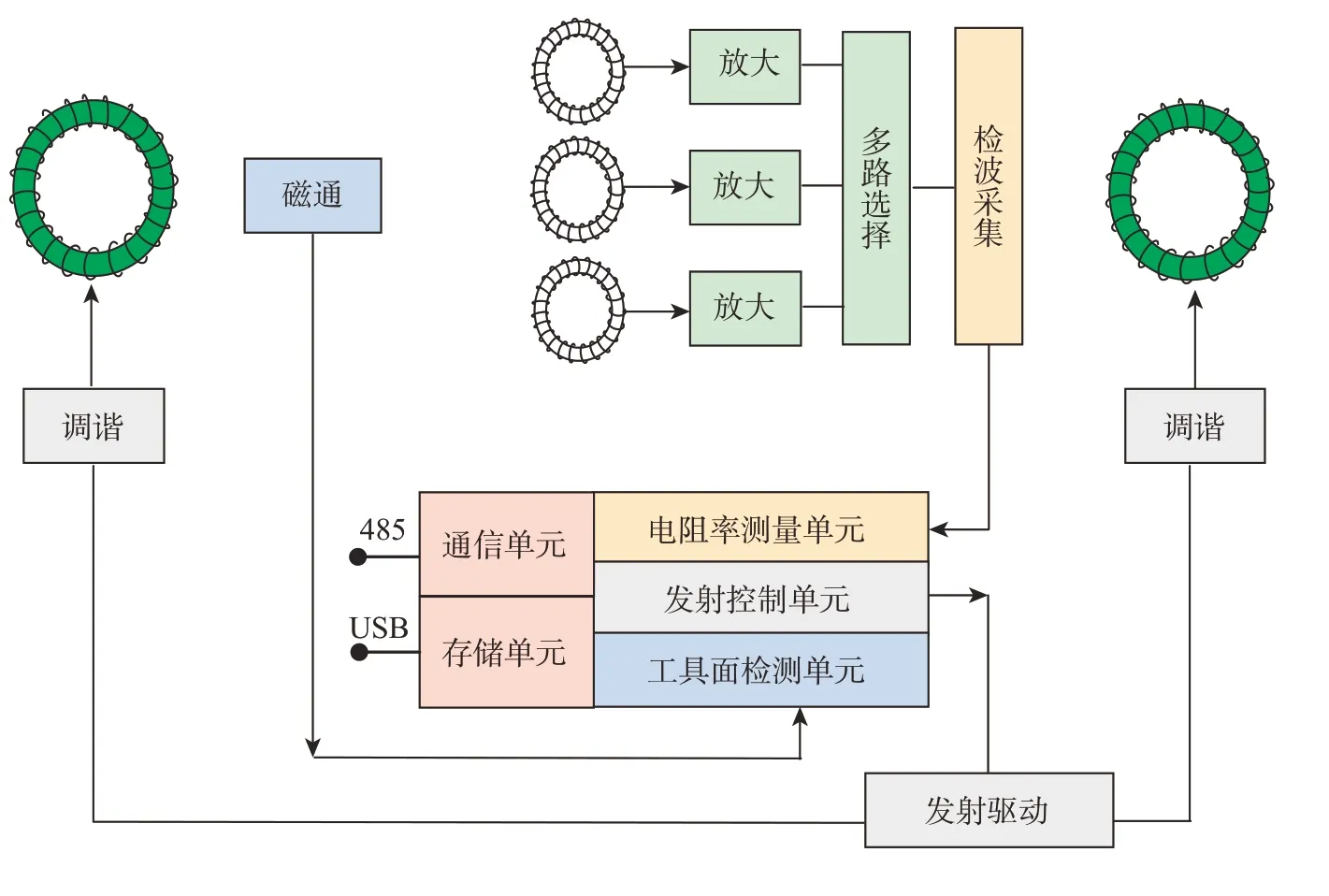
图7 电子系统总体功能框图Fig.7 Overall functional block diagram of the electronic system
2.2 高精度高速动态工具面检测技术
动态角度检测是高精度随钻电阻率成像的难点,尤其是角度检测的精度要求较高,传统的基于磁力计的角度检测系统很难满足要求,因此采用了由磁力计、加速度传感器和陀螺仪组成的综合动态角度检测模块。
陀螺仪利用了科里奥利力(Coriolis force)原理,故称为科式陀螺仪。旋转物体径向运动时将受到切向力(即科里奥利力),如果物体在圆盘上没有径向运动,就不会产生科里奥利力。由于随钻仪器的电路体积受限,选用了基于微电子机械系统(Micro-Electromechanical Systems,MEMS)工艺的陀螺仪。MEMS型陀螺仪内的一个微型装置不停地来回径向运动或者震荡,对应的科里奥利力也不停地横向变化,相位正好与驱动力相差90°。通常有径向和横向2个方向的可移动电容板:径向电容板加震荡电压使微型装置作径向运动,横向电容板测量横向科里奥利运动带来的电容变化。
科氏陀螺仪一般由2个共同振动并不断做反复运动的物体组成,如图8所示(x轴为物体往复运动方向,y轴为科里奥利力方向),当施加角速度ω时,科里奥利力效应在2个物体上产生相反的力,从而引起2个物体间电容的变化。电容的差值与角速度呈线性关系。如果在2个物体间施加线性加速度时这2个物体则沿着同一方向运动,不会检测到电容的变化,因此科氏陀螺仪对振动、倾斜或撞击等线性加速度不敏感。
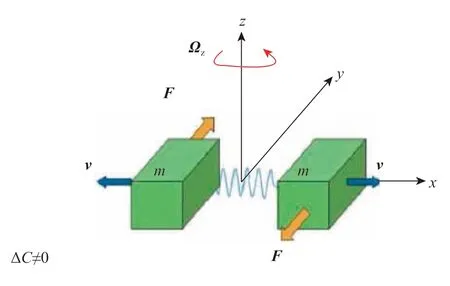
图8 科氏陀螺仪工作原理Fig.8 Principle of the Coriolis gyroscope
MEMS型陀螺仪的瞬时检测精度较高(测量范围内可达到0.01°/s),但存在随机漂移和温度漂移,连续测量中误差会随时间累积,需要定时消除。为此引入磁力计和加速度计,在动态测量过程中定时抓取特征点清除陀螺仪的累计误差,同时根据这些特征点来计算基准空间坐标。
对于直井或者小斜度井,依靠磁力计寻北消除陀螺仪随机漂移的误差。钻进过程中,与水平面垂直方向的磁力计X、Y输出曲线为近似相差π/2的正弦波曲线,利用软件查找X极值点与Y零点(或者X零点与Y极值点出现的时刻),来确定磁北位置(见图9)。
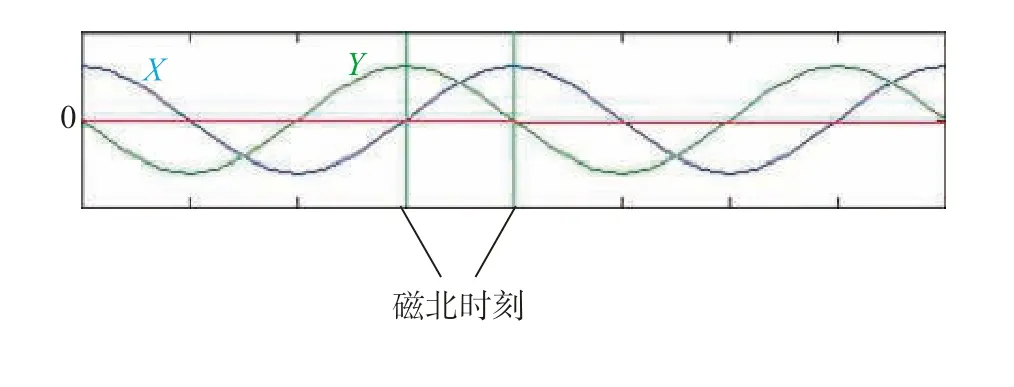
图9 双轴磁力计输出曲线Fig.9 Output curve of the bi-axial magnetometer
动态角度测量系统通过周期性旋转,利用软件就可以直接消除安装误差和环境磁场对磁力计的影响,相对来说刻度过程比较简单。对于大斜度井或者水平井,依靠加速度计找高边角基准清除陀螺仪随机漂移,实现过程与磁寻北类似。通过硬件和软件滤波相结合的方式来消除振动的影响。
2.3 高精度电阻率采集技术
随钻条件下,发射电极和接收电极不可能紧贴井壁,因此电流首先通过钻井液,然后才能进入地层。为了将电流信号尽可能地发射进地层,一方面需要进行聚焦,另一方面是保持发射功率的相对稳定,才能接收到稳定的信号,最终实现高精度的采样。由于地层电阻率变化非常大(0.2~16 000.0 Ω·m),如果使用相同功率发射信号,不但检测精度得不到保证,在井筒周边电阻率非常低的情况下甚至会出现发射电流太大的情况,导致发射元器件过热造成损坏。因此,为了提高检测精度和保护电路中的器件,需要动态调整发射功率。
在井下随钻条件下,无法精确模拟周边环境的变化,无法通过人工干预修正参数,因此最重要的是稳定可靠。当不完全了解一个系统和被控对象,或不能通过测量手段获取系统参数时,可以采用经典PID控制方法实现发射功率的动态调整。发射功率控制流程如图10所示。
PID控制器由比例单元(P)、积分单元(I)和微分单元(D)组成。其输入e(t)与输出u(t)的关系为:

图10 发射功率控制流程Fig.10 Block diagram of the transmit power control process
传递函数为:

式中:kp为比例系数;TI为积分时间常数;TD为微分时间常数。工程应用中需要结合具体的电路优化选择这些参数。
发射信号在不断动态调整,因此在进行地层电阻率采样时,不仅要采集接收信号的幅度,还需采集发射信号的幅度。在计算最终电阻率时,要根据发射信号的幅度校正计算出来的电阻率,校正公式为:

其中

式中:G和b为对应电极的刻度系数;EU和EL分别为上下发射信号的幅度。
根据对应钮扣电极的测量值I可计算出对应的电阻率ρ。
3 现场试验
3.1 近钻头伽马成像测井系统
在标准岩样分层倾斜地层模拟井筒中,近钻头伽马成像测井仪得到的高精度扇区伽马成像结果如图11所示。从图11可以看出,当近钻头下短节穿过不同放射性区域构成的倾斜地层边界时,伽马测量值发生了变化,地层边界在扇区伽马成像图中呈现正弦曲线特征,据此能够准确地探测钻遇地层的边界,估算地层界面倾角,实现精准地质导向钻井。
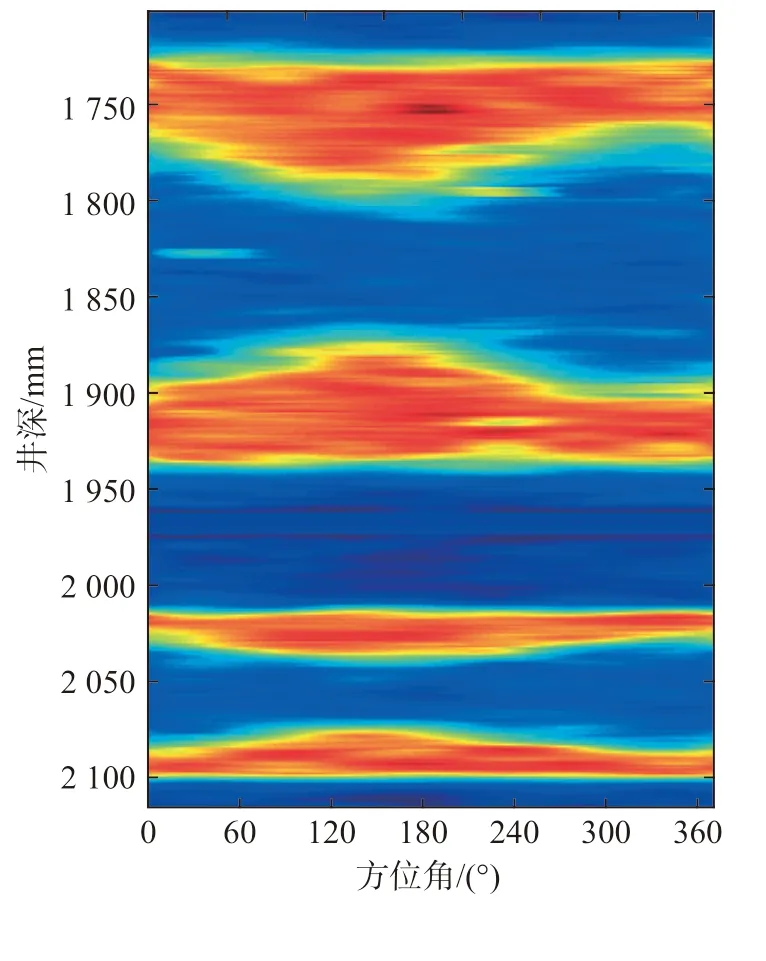
图11 高精度扇区伽马成像图Fig.11 Gamma image of high-precision sector
近钻头伽马成像测井仪先后在胜利临盘油田及鄂尔多斯盆地杭锦旗区块的4口井进行了试验,累计试验时间超过300 h。单次连续入井最长工作时间96 h,连续进尺1 200 m。试验中,近钻头伽马成像测井仪与近钻头随钻伽马成像地质导向技术配合应用。现场应用时,随钻钻井液脉冲传输系统将近钻头伽马系统测量的扇区中最上方和最下方的伽马测量值实时传输到地面的近钻头随钻伽马成像地质导向软件,从而判断钻头在地层中的位置,并及时调整钻头方向,以提高储层钻遇率。
3.2 高精度随钻电阻率成像测井仪
高精度随钻电阻率成像测井仪在胜利油田进行了入井测试,仪器装配入井和启动顺利;起出后外观完好,机械强度和非标工艺得到了验证,实现了随钻井筒地层高清图像采集和地层电阻率测量。入井工作时间13.5 h,1 509~1 579 m井段成像测量70 m,测试成像图如图12所示,可以看出随钻成像测井和电缆测井的数据高度吻合。
4 结论与建议
1)针对复杂油气藏地质导向和随钻测井评价需求,基于随钻扇区扫描原理,建立了仪器响应特征模型,并研制出了高精度近钻头伽马成像测井仪和随钻电阻率成像测井仪。
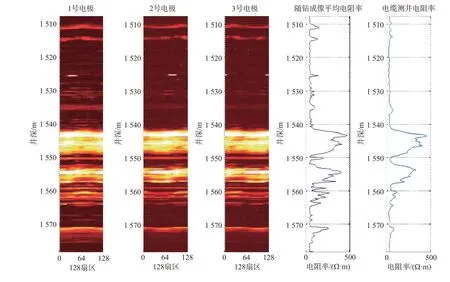
图12 随钻电阻率测井成像图与电缆测井结果的对比Fig.12 Comparison on the images of LWD and cable logging
2)现场试验时,近钻头伽马成像测井仪和随钻电阻率成像测井仪都采集到了高精度随钻成像测井数据,表明我国已经掌握了高精度随钻成像测井关键技术,但与国外先进技术相比还有差距,高精度随钻测井仪的测量精度和可靠性仍需进一步提高。
3)建议进行大量现场试验,以发现所研制高精度随钻测井仪器的不足和缺陷,并进行改进完善,不断提高其可靠性。另外,建议针对低渗透油气藏、页岩气藏、致密气藏等非常规油气藏进行高精度随钻成像测井技术应用研究,为非常规油气藏的勘探开发提供有效的技术手段。
