井下机器人研究进展与应用展望
2019-06-28刘清友朱海燕赵建国
刘清友, 董 润, 耿 凯, 朱海燕, 赵建国
(1.油气藏地质及开发工程国家重点实验室(成都理工大学),四川成都 610059;2.西南石油大学机电工程学院,四川成都610500;3.中国石油集团海洋工程有限公司钻井事业部,天津 300280)
水平井测井、压裂等井下作业过程中,入井管柱常常因与井壁接触面积过大而受到较大的摩阻,导致管柱屈曲锁死而出现下入困难的问题[1],通常采用机械减阻或润滑剂减阻的方法来减小摩阻[2],但不能从根本上解决管柱屈曲锁死的问题。为此,国内外开展了井下机器人研究与应用,将其接在入井管柱中在井下对管柱进行牵引[3],使管柱受到轴向拉力的作用,从根本上解决管柱下入困难的问题[4]。目前,根据井下机器人的主要用途和结构特点,将其分为井下牵引机器人和井下钻井机器人2大类[5],其中井下牵引机器人主要为井下管柱提供牵引力,分为轮式、履带式和伸缩式3种类型[6-7],国外应用较为成熟[8],国内目前基本处于实验研究阶段;井下钻井机器人不仅能为井下管柱提供牵引力,还具备钻井液通道,能为钻头提供钻压,有伸缩式和獾式2种类型[9],目前国外处于实验研究阶段,国内尚在理论研究阶段,很少有相应的样机实验研究。笔者以近年来在井下机器人技术方面开展的攻关研究为基础,系统介绍了井下机器人的4大关键技术与发展现状,并对其现场应用进行了展望,以期为我国井下机器人技术的研究提供参考和借鉴。
1 井下机器人关键技术
井下机器人主要包括支撑机构、驱动系统、控制系统和能源供给系统4个部分(即井下机器人4大关键技术),到目前为止,还没有对该4大关键技术进行系统研究的相关报道,因此笔者对其进行了详细的调研和分析。
1.1 支撑机构
支撑机构的主要功能是为井下机器人的驱动轮、驱动滑块或履带提供在井壁或套管上的支撑力,以确保套管或井壁对井下机器人有足够摩擦力,从而实现对井下管柱的牵引。井下机器人采用的支撑机构主要有齿轮、蜗轮蜗杆、丝杠、凸轮、液压活塞和自锁滑块等,其性能对比见表1。由表1可知:齿轮、蜗轮蜗杆、丝杠和凸轮采用电机作为动力源,因此支撑力较小且容易失效卡住,但易于控制;液压活塞、自锁滑块采用液压泵或利用管内外压差作为动力源,因此支撑力较大,能提供更大的牵引力,但存在动密封易失效、自锁易卡住等问题。因此,设计井下机器人时,应根据各种支撑机构的结构特点和使用条件选择合适的支撑机构。
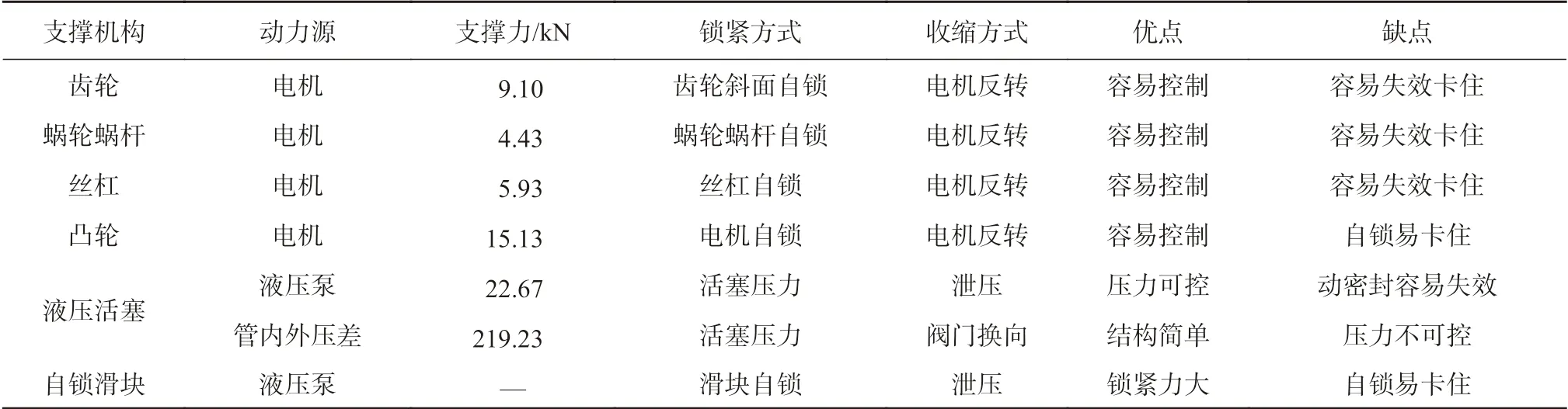
表1 井下机器人不同支撑机构的性能对比分析Table 1 Comparative analysis on the performances of various supporting mechanisms of downhole robots
1.2 驱动系统
驱动系统的主要功能是为井下机器人提供牵引管柱的动力,并驱动井下机器人正常运行。目前,井下机器人的驱动系统主要有电机驱动轮、管内外压差(阀门)和液压驱动轮等,其性能对比见表2。由表2可知:液压驱动轮的最大牵引力为12.00 kN,且最大牵引速度为1 677.5 m/h,是目前井下牵引机器人驱动系统的首选;而管内外压差(阀门)的最大牵引力为65.77 kN,且最大牵引速度为304.0 m/h,能够满足小井眼连续油管钻井对井下钻井机器人的要求。
1.3 控制系统
控制系统可以对井下机器人的动作机构进行管控,对电磁阀或电泵的通断进行逻辑控制,进而控制井下机器人的运动,同时收集其实时运动参数、井下工况并反馈至上位机,并进一步控制井下机器人的动作,从而形成一个闭环控制系统。井下机器人采用的控制系统主要有PIC(单片机)+CPLD(可编程器件)、PIC+DSP(数字信号处理)和智能控制等,不同控制系统的性能对比见表3。由表3可知:PIC结构简单,工作可靠,因此目前井下机器人的控制系统主要以PIC为核心,但是难以实现闭环控制;智能控制方式可以实现井下机器人的自主运行,是井下机器人控制系统的发展方向,但其控制原理复杂,可靠性不高。
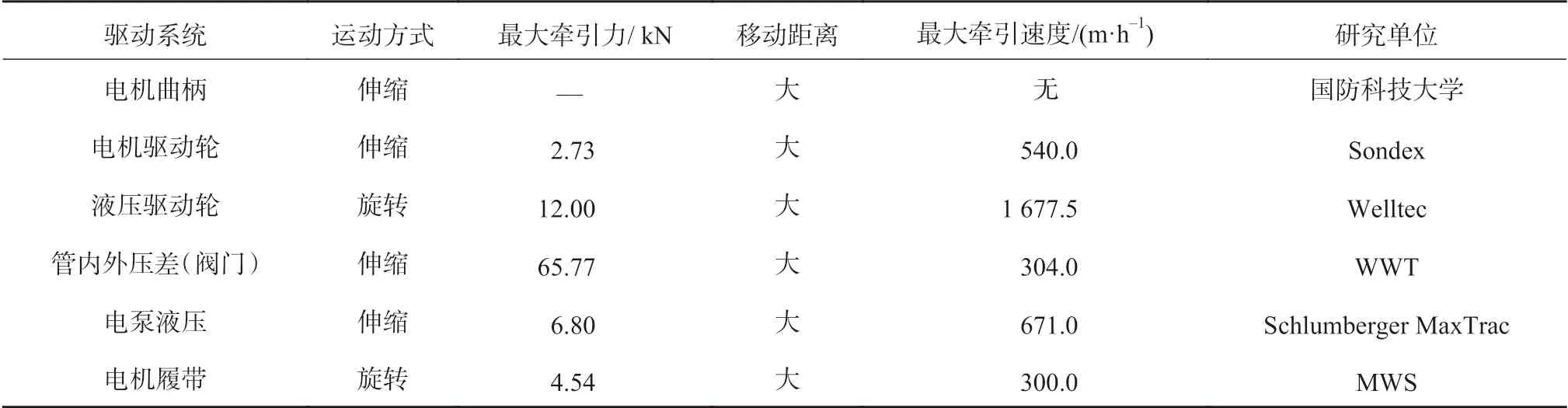
表2 井下机器人不同驱动系统性能对比分析Table 2 Comparative analysis on the performances of various drive systems for downhole robots
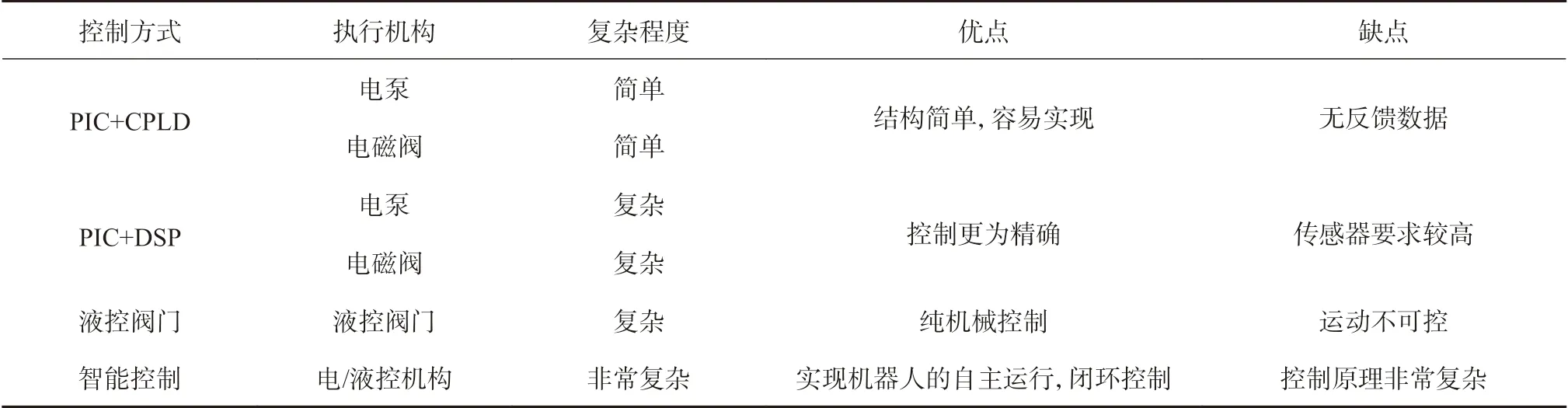
表3 井下机器人不同控制系统性能对比分析Table 3 Comparative analysis on the performances of various control systems for downhole robots
1.4 能量供给系统
能量供给系统用来为井下机器人提供动力,主要有流体动能发电、电缆和液压等3种能量供给方式。目前,井下机器人主要采用电缆能量供给方式,由于电缆需占用机器人的设计空间,且牵引力较小,因此对于用于微小井眼的井下机器人来说,不宜采用电缆能量供给方式,采用液压能量供给方式比较可取,因为液压能量供给系统不会占用有限的设计空间,牵引力达到65.77 kN,且移动距离较长,能使井下机器人牵引更长的管柱。
2 井下机器人研究进展
2.1 井下牵引机器人
轮式井下牵引机器人技术较为成熟,其结构简单、工作可靠,广泛应用于测井、完井等井下管柱的牵引作业中,但是其牵引力较小,难以适应复杂的井下工况。目前,具有代表性的该类机器人是GESondex公司研制的轮式井下牵引机器人[10],由驱动模块和扶正模块组成,一般单节配置1组驱动短节(包括2个驱动轮)和1组扶正短节(包括2个扶正轮),如图1所示。大庆油田于2003年引进该机器人并用于水平井测井作业,成功获得了生产测井资料。哈尔滨工业大学研制的轮式牵引机器人是国产该类机器人的代表[11],其外径105.0 mm,长度9 m,牵引力2 kN,目前已研制出实验样机。

图1 GE-Sondex公司的轮式牵引机器人[10]Fig.1 GE-Sondex company's wheeled tractor robot[10]
伸缩式井下牵引机器人具有更大的牵引力,适用井深更深,但是难以小型化,安全可靠性低。因此,人们针对其安全性和小型化开展了一些研究,并取得了一些成果。G.Greg等人[12]发明了一种采用刀片式三连杆支撑机构的伸缩式井下牵引机器人(见图2),能够避免卡钻,但是由于连杆支撑机构存在惯性力,容易产生动载荷,因此其牵引力较小。R.E.V.Krueger[13]发明了一种只有一条偏心支撑臂的井下牵引机器人(其他牵引机器人的支撑臂为3条或3条以上),大大减小了井下牵引机器人的外形尺寸(见图3)。
2.2 井下钻井机器人
井下钻井机器人的设计空间有限,不但小型化难度较大,而且携岩流道也难以满足钻井施工的携岩要求。目前,国外只有WWT公司对伸缩式井下钻井机器人的支撑机构进行了深入研究[14],研制了弹簧片支撑机构井下钻井机器人(如图4所示),并进行了牵引试验,但未见现场试验的报道。

图2 刀片式三连杆支撑机构伸缩式井下牵引机器人[12]Fig.2 Blade type telescopic downhole traction robot with three-link support mechanism[12]

图3 偏心支撑臂牵引机器人[13]Fig.3 Traction robot with eccentric support arm[13]

图4 WWT公司伸缩式井下钻井机器人[14]Fig.4 WWT company's telescopic downhole drilling robot[14]
国内也开展了井下钻井机器人的研究。笔者根据钻井机器人牵引力大、尺寸小的现场施工要求,结合国内外井下机器人的研究与试验情况,优选了伸缩式井下钻井机器人结构方案,并于2016年研制出第一代液压控制伸缩式井下钻井机器人,主要由2个牵引缸、2个支撑缸及1个控制短节组成(外置液压控制系统),牵引缸、支撑缸呈径向布置(见图5),采用液压控件和单斜面支撑机构,避免了电子元件高温易损坏的问题,且牵引力更大。
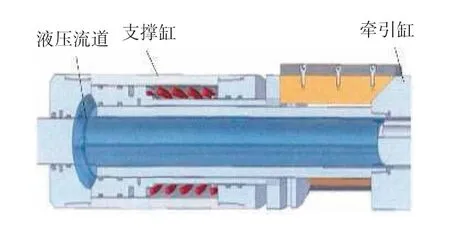
图5 牵引缸、支撑缸径向布置示意Fig.5 Schematic diagram of the radially arranged traction cylinders and support cylinders
2018年,笔者又设计研制了第二代伸缩式井下钻井机器人,提出了牵引缸、支撑缸轴向布置方式及斜面-连杆支撑方式(见图6),并进行了控制结构的可靠性和稳定性实验研究。第二代井下钻井机器人的牵引缸与支撑缸之间利用跨接拉杆实现固连,径向上可以减少一层液缸,并减少了牵引缸与支撑缸之间的液压流体通道,从而实现牵引缸、支撑缸单层液压缸轴向布置,同时减小了钻井机器人的径向尺寸。

图6 井下钻井机器人牵引缸、支撑缸轴向布置示意Fig.6 Schematic diagram of the axially arranged traction cylinders and support cylinders for the second generation downhole drilling robot
图7所示为伸缩式井下钻井机器人的运动机理[15]。由图7可知,井下机器人正常工作状态包括6个运动过程、7个运动状态。

图7 伸缩式井下钻井机器人运动机理Fig.7 Movement mechanism of downhole drilling robot
状态a:右牵引缸将整个机器人向右牵引,左牵引缸带动左支撑缸向右移动;
状态b:左支撑臂利用左支撑缸完成支撑动作;
状态c:右支撑臂与右牵引缸收缩并向右移动;
状态d:左牵引缸牵引整个机器人向右移动;
状态e:右支撑臂与右支撑缸一起完成支撑动作;
状态f:左支撑臂与右牵引缸收缩并向右移动;
状态g:重复步骤a—f。
3 应用展望
针对井下机器人的功能特点,并结合油气开发现状与需求,展望了井下机器人的应用前景,提出了基于井下机器人技术的3项钻井完井技术。
3.1 连续油管多分支微小井眼水平井完井技术
我国页岩气开采依然面临成本高、难度大、环境污染严重等诸多难题,为此,笔者等人[16]提出了多分支微小井眼水平井完井技术(如图8所示),在微小井眼中实施定向爆破,以替代水平井分段压裂,减少对储层的损害和对环境的污染,从而形成经济环保的页岩气开采新技术。该技术的关键是连续油管微小井眼钻井技术,由于连续油管在井眼中容易出现屈曲锁死的问题,因此水平段通常较短。井下钻井机器人可在微小井眼中牵引连续油管并提供所需钻压,能大幅度增加水平段长度,从而提高页岩气井产量,降低开采成本。由于微小井眼的尺寸限制,且要求井下钻井机器人具有携岩流道,井下钻井机器人的小型化仍是未来亟待解决的问题。
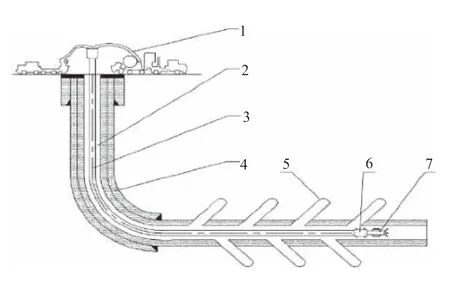
图8 多分支微小井眼钻井示意Fig.8 Schematic diagram of multi-lateral micro-hole drilling
3.2 连续油管智能闭环钻井技术
智能闭环钻井过程中无需操作人员干预,钻压、扭矩等钻井参数完全由机器人自行控制,具有工况参数识别、钻井数据处理、故障检测与反馈、钻井参数自行设定等特点,是信息技术、微电子技术、机器人技术及通信网络技术与钻井工程紧密结合的一种集成化技术[17]。为此,笔者提出了连续油管智能闭环钻井技术(见图9),整个钻井作业可实现自动化控制,地面设备可集成安装在一台货车车厢中。井下钻井机器人是该技术的核心,但要实现钻井作业的完全智能控制非常困难,因此还需要深入研究井下钻井机器人的智能控制系统。

图9 连续油管智能闭环钻井技术Fig.9 Closed-loop drilling technology with coil ed tubing intelligent
3.3 无线单桥塞水平井分段压裂技术
常规桥塞分段压裂过程中要下入多个桥塞,压裂完成后需对桥塞进行磨铣作业,不但耗时长,而且磨铣过程中容易损坏套管,引起井下故障[18]。为此,笔者提出了无线单桥塞水平井分段压裂技术(如图10所示)。该技术的关键设备主有井下机器人控制器、桥塞和无线井下机器人等,工艺流程为:1)将桥塞及机器人在地面进行组装并测试,泵送到井底;2)地面发送分段压裂指令,机器人自动搜索压裂段位置,并射孔;3)自动避开射孔位置,并坐封桥塞;4)地面打压压裂,解封桥塞;5)重复步骤2)~4),完成多级分段压裂;6)下入钻柱打捞井下机器人,或直接将机器人泵入井底。
无线单桥塞水平井分段压裂技术不仅具有常规分段桥塞压裂大排量、高压力的优点,还具有钻柱起下次数少、桥塞免磨铣等优点,可以提高多级分段压裂作业效率,降低作业风险。无线井下机器人为该技术的核心,应具有信号接收与执行、移动、坐封桥塞等功能,对无线单桥塞分段压裂工艺施工具有决定性的作用。由于目前普遍采用深井/超深井进行油气开采,因此信息传输是无线井下机器人的关键技术之一,也是未来井下机器人研究的热点。
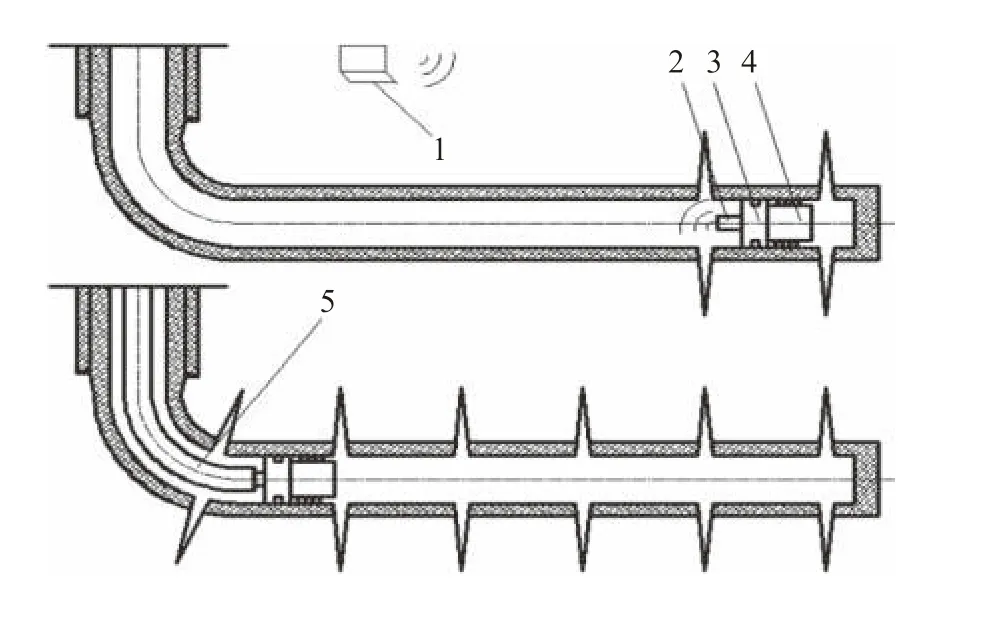
图10 无线单桥塞水平井分段压裂示意Fig.10 Schematic diagram of wireless single bridge plug staged fracturing in horizontal wells
4 结 论
1)将井下机器人的关键技术概括为支撑机构、驱动系统、控制系统和能量供给系统等4部分,有利于井下机器人的进一步研究和应用拓展。
2)井下牵引机器人的应用较为成熟,主要是考虑小型化和安全性问题。井下钻井机器人由于难以小型化和提供较大的牵引力,现场试验还较少,是未来井下机器人的研究热点。
3)基于井下机器人技术发展现状和油气开发需求,认为井下机器人将在连续油管多分支微小井眼水平井完井、连续油管智能闭环钻井和无线单桥塞水平井分段压裂中得到广泛应用。
