基于红外与单目视觉的机器人自动回充系统
2019-06-25魏银,李垚
魏 银, 李 垚
(中国科学技术大学 信息科学技术学院,安徽 合肥 230026)
0 引 言
自动充电是家用移动机器人如扫地机必不可少的一个功能,这个过程中机器人与充电座的对接离不开各种传感器的使用[1],以往的扫地机器人在自动充电任务中基本单独采用红外传感器技术进行对接[2],通过能接收到的信号红外传感器的位置与数量来判断机器人与充电座之间的相对位置从而进行自动充电,这种方式需要使用较多的红外传感器;或者是采用较少的红外传感器,利用检测出信号的强度来判断机器人的方向[3,4],因此需要红外信号强度检测精度非常高的接收电路;也可以通过红外信号反射的原理,机器人在不同位置时发出红外信号通过充电座反射回来接收信号,判断出机器人与充电座的相对位置进行对接[5];第四种是使用激光器和摄像头的方案[6,7],激光方向性好,一旦检测到信号对接精度高,缺点无论激光还是摄像头探测范围小,一开始不能确定目标大致方位,则需要漫游,或者只能通过固定的角度进入充电座检测范围内;还有一种充电座外形具有凹凸不平区域,两种区域分别覆盖有光线吸收率高的材料和光线反射率高的材料,这样采用激光雷达传感器进行检测,为了使充电座容易被检测到,充电座体积较大,而且激光雷达的成本也相对较高。本文所用机器人使用摄像头进行定位与避障,所以基于此平台,实现了机器人使用红外与摄像头进行自动回充的方案,一方面,红外弥补了摄像头检测信息范围小的缺点,而摄像头又弥补了红外精确度低的问题。本文工作内容如下:设计了充电座与机器人的光路模型,完成了红外信号的收发工作,通过红外信号完成机器人的远距离对接,引导机器人靠近充电座,完成了摄像头对充电座红外二极管图像的采集与光斑的提取,对光斑进行比较,从而引导机器人调整自身位姿,完成近距离精确对接,并测试了系统的精确度。
1 扫地机器人自动回充系统介绍
扫地机器人自动回充系统主要由充电座与机器人两部分构成,充电座作为信号发送端含有两个红外发射头,机器人作为信号接收端包含两个红外接收头和一个摄像头,充电座的两个红外发射头发射红外调制信号供给移动机器人的红外接收头用以接收信号,引导机器人靠近充电座,并进一步移动到充电座中轴线附近,摄像头拍摄检测出两个红外接收头精确位置,引导机器人与充电座进行精确对接,自动回充模型如图1所示。

图1 机器人自动回充系统模型
2 扫地机器人、充电座的传感器位置分布与光路
2.1 扫地机器人传感器位置分布与光路
扫地机器人前面装有两个红外接收头A、B,和摄像头,其中接收区域1为红外接收头A单独的接收区域,接收区域2为红外接收头B单独的接收区域,接收区域3为红外接收头A、B共同的接收区域,区域夹角限制为β,β的大小应小于摄像头未发生畸变的水平视场角的一半,摄像头镜头为感红外镜头,用于拍摄检测充电座上的红外发射头在图像上形成的光斑。扫地机器人模型与光路如图2所示。
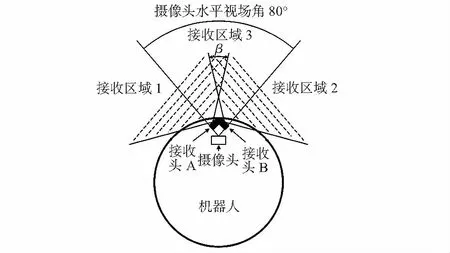
图2 扫地机器人模型与光路
2.2 充电座传感器位置分布与光路
充电座有2个红外发射头a和b, a,b发射调制红外光,覆盖区域分别为发射区域1、2,3为a和b公共的覆盖区域,红外发射头a和b与遮光板隔开,使得公共发射区域3的角度为α,充电座模型与光路如图3所示。
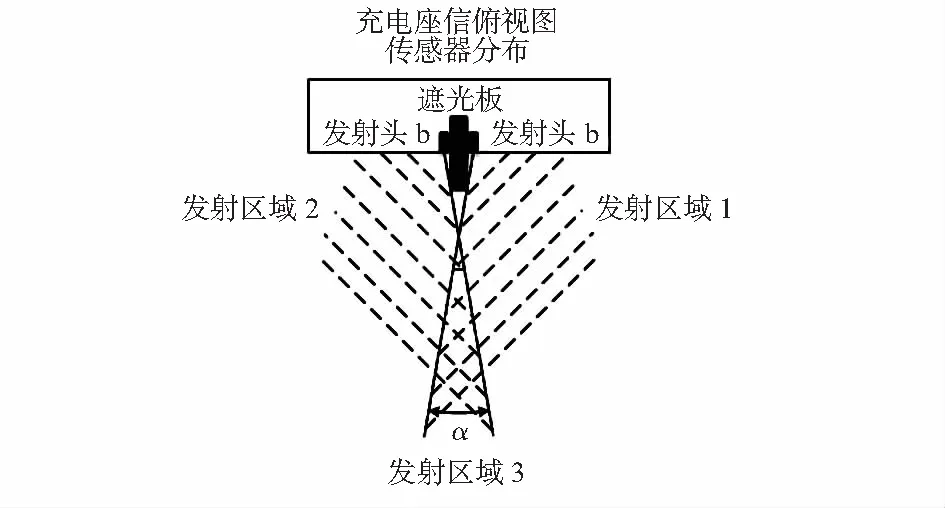
图3 充电座模型与光路
3 红外信号与摄像头信息
3.1 红外信号
红外发射头a,b采用38 KHz频率波形作为载波(此处使用的红外接收头的中心频率为38 KHz),调制信号的占空比的1/3,2路信号周期各不相同,用以区别两路不同的信号,两路信号之间相差至少30 ms时间间隔(红外接收头接收信号的间隔为30 ms,当调制红外信号的信号间隔低于30 ms时,红外接收头有一定几率检测不到红外信号,为了保证机器人在红外发射头信号重叠的区域里面,红外接收头也可以检测到所有覆盖到该区域的信号,规定两路信号的间隔大于30 ms),单个信号自身时长略小于10 ms,所以每路信号自身时间间隔大于70 ms,保证即使机器人处于发射区域的重叠部分也可以检测到不同红外发射头的信号,信号示意图如图4所示,由于信号间隔期间发射头处于高电平,因此信号间隔期间发射头常亮。
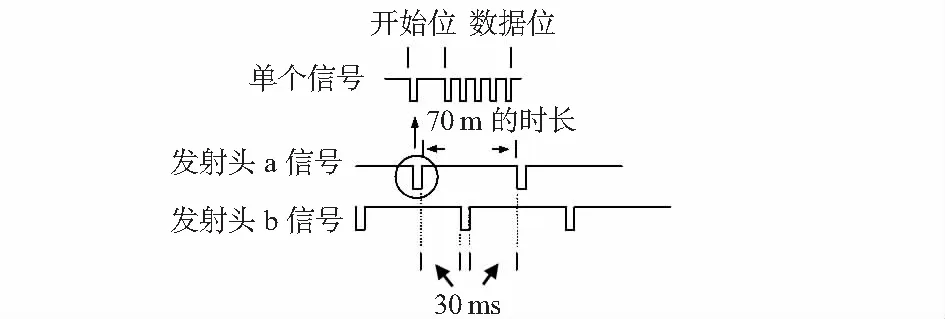
图4 两路红外信号时间间隔
3.2 摄像头信息
摄像头检测红外发射头a,b在图像中形成的光斑[8],判断机器人是否偏离了正确的方向,用以矫正机器人的位姿,图像中的光斑与二值图像如图5所示,根据光斑得出机器人前进的方向。

图5 红外发射头在图像中的光斑提取图
4 对接过程
机器人与充电座的对接步骤分为两步,主要思路:利用红外发射头、接收头与摄像头的配合,机器人先利用红外发射头靠近充电座附近,并逐步移动到充电座的中轴线上,最后再用摄像头完成机器人与充电座的精确对接。
第一步:利用红外信号对接。当任意一个红外接收头收到红外信号时,机器人转向使得两个红外接收头都可以收到红外发射头的信号,若两个接收头都可以收到发射头a和b的信号,说明机器人出了发射区域3,则开始进行摄像头对接。若接收头A,B只能收到发射头a或b中的一个信号,则说明机器人处于发射区域1或者发射区域2中,机器人转向面对发射区域3,以机器人处于发射区域2为例:∥机器人从发射区域2进入发射区域3
If(A,B同时收到b的信号)
{
机器人右转90°;
}
While(A收不到a的信号)
{
While(A收不到b的信号)
{
机器人左转;
}
While(A可以收到b的信号)
{
机器人前进;
}
}
∥机器人从进入发射区域3移动、转向到面对充电座
While(B收不到b的信号)
{
While(A可以收到a和b的信号)
{
机器人前进;
}
While(A可以收到a的信号,收不到b的信号)
{
机器人左转;
}
}
第二步:利用摄像头信息对接。当机器人完成红外信号对接以后,将会处于发射区域3面向充电座,此时机器人与摄像头仍然存在几厘米的误差,此时要用摄像头进行对接,摄像头拍摄充电座,提取出图像中的两个发射头形成的光斑,根据图像中两个光斑的面积判断出机器人在充电座左侧或是右侧,如图6所示,左边为光斑提取图像,右边为图中光斑的面积与坐标,①、②中左侧光斑大于右侧光斑,所以机器人在充电座中轴左侧,③中右侧光斑大于左侧光斑,所以机器人刚越过中轴线移动到了充电座中轴右侧,②、③的中间区域即为充电座中轴线区域,机器人调整到充电座中轴线上转向面对充电座对准两个光斑的中心(④的位置,数据得到两个光斑中心坐标为(312,130))前进即可以与充电座完成对接。
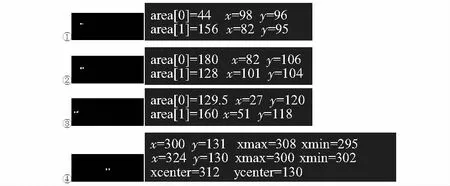
图6 摄像头对接时的图像信息
传统的对接方式采用左右碰撞会使得对接寻路效率低,而本方案采用机器人在公共区域边沿逐步旋转角度的方式避免行进多余的路程,提高寻路效率。传统对接路径和本方案路径如图7所示。
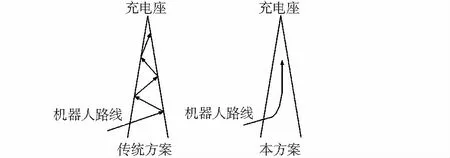
图7 传统对接路径与本方案对接路径对比
5 实验结果
一共进行50次对接实验,其中机器人对准在了充电座左边的时候,标识为负(-),其中机器人对准在了充电座右边的时候,标识为负(+),实验数据如图8所示,实验数据为确定对接范围误差,所以并未精确到0.1 mm,其中47次实验结果为机器人与充电座的对接误差在±5 mm以内,有3次偏差约为6 mm,精度较高。
6 结束语
本文采用了红外对接以及单目视觉技术相结合,实现了扫地机器人自动充电的系统,其中红外对接技术解决了对接过程中对充电座对扫地机器人整体运动趋势的引导,是机器人较远距离感应到充电座发出的信号,让机器人靠近充电座并且逐步移动到充电座的中轴线上的位置,而摄像头对充电座红外信号的采集,又使得机器人可以更加精确的与机器人完成对接,完成对接过程中的最后一步,从实验结果来看,50次实验的对接数据中94 %的数据落在了±5 mm的范围误差内,效果较好。
在整个对接过程中,机器人逐步走向充电座中轴线的过程中,机器人避免了很多傻瓜式机器人不停左右转向,重复碰撞,加长了对接路径的问题,从而降低了时间,提高了寻路效率。
系统还存在的问题主要在系统模型的误差上面,实际模型与理论上的模型存在一些偏差,除此以外,如果进一步减小两个红外发射头之间的距离,可以使的摄像头检测光斑时的误差更小。
