一种改进自适应陷波器在齿轮箱振动信号频率估计中的应用
2019-06-21罗顺安林继铭
张 锋, 罗顺安, 张 勇, 林继铭
(华侨大学 机电及自动化学院, 福建 厦门 361021)
在齿轮系统振动主动控制中,参考信号的选择直接影响控制效果[1-2],为获得与实时振动高度相关的参考信号,可根据实时采集的振动信号估计齿轮啮合频率,再在线合成[3],因此快速、准确地估计齿轮系统振动信号的频率在其振动主动控制中有重要作用。
通过振动信号估计齿轮啮合频率的方法有多种,如FFT(Fast Fourier Tranform)[4]、MUSIC(Multiple Signal Classification)[5]等,但FFT由于栅栏效应,当数据量较少时,分辨率较低[6];MUSIC虽然具有较高的分辨率,但实现过程涉及自相关矩阵计算和奇异值分解,计算量及数据存储量大[7],难以根据振动信号实时地估计啮合频率,而二阶IIR(Infinite Impulse Response)自适应陷波器通过调整单个参数就能实现对频率的估计,计算简单,被广泛应用在振动主动控制中对实时啮合频率的在线估计[8-9],用于调整参数的自适应算法是影响频率估计速度与精度的主要因素,平滑梯度(Plain Gradient, PG)算法[10]计算复杂度低,实时应用简单,但存在收敛速度缓慢,稳态误差和稳态偏差较大等不足,不能满足齿轮系统振动信号频率估计中对速度和精度的要求;Punchalard等[11]对PG算法进行改进,得到改进平滑梯度算法(Modified Plain Gradient, MPG),MPG算法采用一种新的代价函数以提高陷波器的收敛速度,但没有解决稳态误差和稳态偏差较大的问题;Loetwassana等[12]在MPG算法的陷波器系数更新方程中引入偏差抵消项,得到一种无偏平滑梯度算法(Unbiased Plain Gradient, UPG),与MPG算法比较,引入的偏差抵消项使UPG算法具有小的稳态偏差,但降低了收敛速度,且当待估计信号信噪比较低时,UPG算法仍存在较大的稳态误差。
为满足齿轮箱振动信号频率估计中对高收敛速度、低稳态误差和低稳态偏差的同时需求,将变步长(Variable Step-Size, VSS)方法应用在UPG算法中,得到变步长无偏平滑梯度(VSSUPG)算法,通过对比VSSUPG陷波器与UPG、MPG陷波器输入信号频率估计的响应特性,验证了所提算法在收敛速度和稳态误差上同时具有更好的性能。并与FFT和比值校正FFT的频率估计特性进行比较,结果VSSUPG陷波器对频率变化具有更好的追踪性能,适用于通过实时振动信号在线估计齿轮啮合频率。将两个VSSUPG陷波器串联构成级联陷波器组,通过二级齿轮箱振动加速度信号实时地估计其两个啮合基频,实验结果显示该自适应陷波器组能够快速且准确地估计出对应频率,验证了VSSUPG算法在实际应用中的有效性。
1 二阶IIR自适应陷波器
二阶IIR自适应陷波器的传递函数为
式中:a为陷波器系数;ρ(0<ρ<1)为带宽因子,决定陷波带宽,ρ越小,陷波宽度越大,当ρ=0时,IIR陷波器退化为FIR陷波器[13]。由传递函数可知,二阶IIR陷波器的结构如图1所示。e1(k)=x(k)+ax(k-1)+xk-2为陷波器的中间状态,e2(k)=e1(k)-ρae2(k-1)-ρ2e2(k-2)为陷波器的输出。

图1 二阶IIR陷波器结构


为提高算法收敛速度,Punchalard等在MPG算法中采用新的代价函数J(a(k))=e1(k)e2(k),则系数a(k)的更新方程变为

a(k)-μs1(k)e2(k)-μs2(k)e1(k)
Loetwassana等提出的UPG算法相比MPG算法对低信噪比信号频率的估计具有较小的稳态偏差。将N(z)、H(z)对输入信号包含的噪声v(k)的响应分别表示为v1(k)和v2(k),将s1(k)的梯度计算中由于v(k)而产生的梯度噪声表示为v3(k)。其中v2(k)与v3(k)的互相关值是导致MPG算法存在稳态偏差的偏差项,可表示为

a(k+1)=a(k)-μe2(k)s1(k)+μαe1(k)s1(k)

图2 PG、MPG、UPG自适应陷波器频率估计响应
由图2可知,三种算法中,PG算法需要3 s的迭代才趋于稳定,收敛速度最慢,且稳定后的偏差和误差都最大;MPG算法只需1.8 s的迭代就达到稳定,收敛速度最快,但仍存在较大的稳态偏差和稳态误差;UPG算法在三种算法中具有最小的稳态偏差和稳态误差,但在2 s的迭代后达到收敛,收敛速度低于MPG算法。
2 基于变步长的UPG算法

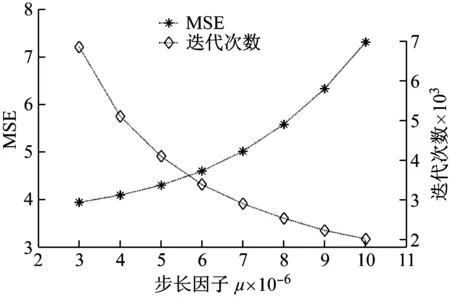
图3 步长因子μ与UPG自适应陷波器响应关系
为得到收敛速度快且稳态偏差和稳态误差小的算法,VSS方法[17]应用在UPG算法上,构成VSSUPG。即在陷波器系数a(k)远离a*阶段采用大步长以加快收敛速度,在进入a*的邻域内采用小步长以减小稳态误差。

综上,VSSUPG算法对陷波器系数a(k)的更新过程如下
a(k+1)=a(k)-μ(k)e2(k)s1(k)+μ(k)αe1(k)s1(k)
3 性能比较

图4 VSSUPG陷波器的频率估计响应
同时比较VSSUPG陷波器估计两个频率所需的时间,估计第一个频率所需时间为0.6 s,估计第二个频率所需时间为0.15 s,由于VSSUPG陷波器是从系数初始值开始,按照MSEa的负梯度方向,根据步长因子搜索最优值a*,从响应曲线可见,当步长因子迭代参数相同时,VSSUPG陷波器估计时间由滤波器系数初始值a0与最优值a*的接近程度决定。对比VSSUPG陷波器对不同信噪比输入信号的响应,可以看出,信噪比对收敛时间没有明显影响,而随着信噪比降低,估计频率的稳态偏差与稳态误差增大,当信噪比为0时,估计频率出现震荡,具有较大的稳态误差和稳态偏差。
为对VSSUPG陷波器估计频率的准确性进行测验,将VSSUPG陷波器对输入信号的响应与FFT和用比值法校正的FFT[18]进行比较。采用上述x(k)为待估计信号,信噪比的取值由3 dB至24 dB,取值间隔为3 dB。VSSUPG陷波器对信噪比<10 dB输入信号采用上述低信噪比参数,对>10 dB信号采用上述高信噪比参数。FFT的频率分辨率由采样频率与采样点数的比值决定,增加采样点数能有效提高频率估计精度[19],但由于振动主动控制中用于估计啮合频率的振动信号需在线实时采集,则增加采样点数等同于增加信号采集时间,同时增加数据存储量,且由于参考信号根据估计频率在线合成,因而需要对FFT计算得到的频谱进行遍历以搜索峰值并确定对应频率值,进行比值校正同样需要峰值搜索,增加采样点数将增加计算量,因此根据1 000 Hz的采样频率,选择合适的采样点数512。
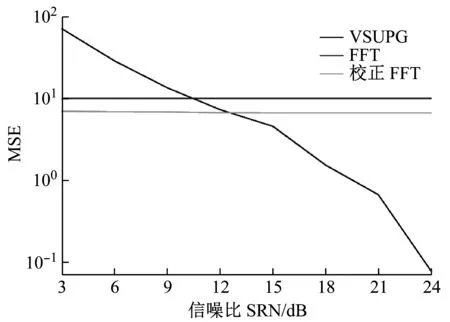
将VSSUPG陷波器、FFT、比值校正FFT估计频率的MSE进行比较,结果如图5所示。其中图5(a)对应频率为70 rad/s的输入信号,图5(b)对应频率为95 rad/s的输入信号。从图5(a)、5(b)可知,VSSUPG陷波器的估计频率平方误差随着信噪比增加而减小,而FFT和比值校正FFT无明显变化,对于信噪比>10 dB的输入信号,VSSUPG的估计频率平方误差小于FFT,而对于信噪比大于15 dB的输入信号,VSSUPG的估计频率平方误差小于比值校正FFT。对比估计频率所需时间,根据采样频率和采样点数可计算得,FFT及校正FFT所需采集数据时间为0.512 s,加上FFT计算及峰值搜索所需时间,则FFT和校正FFT频率估计时间约为6 s。与图4进行比较可知,对于第一个频率的估计,VSSUPG陷波器与FFT和比值校正FFT所需估计时间相等,但当频率发生突变时,VSSUPG陷波器在0.15 s内达到收敛,完成对新频率的估计,而FFT和比值校正FFT完成数据采集、频率估计和峰值搜索仍然需要0.6 s。
综上分析,从估计精度上比较,对于低信噪比信号,FFT和比值校正FFT能取得较好的估计精度,但随着信噪比增大,FFT和比值校正FFT由于栅栏效应,估计精度无明显改善,而VSSUPG陷波器的频率估计精度增高,从而取得比FFT和比值校正FFT更好的估计精度。从估计时间上比较,VSSUPG陷波器的所需频率估计时间受陷波器系数a(k)的初始值a0与最优值a*的接近程度影响,而FFT和比值校正FFT由于需要等待信号采集,因而当采样点数固定,则所需时间相对固定。在齿轮传动系统中,由于驱动与负载的变动,齿轮啮合频率经常会出现小范围的变化,此时VSUPG陷波器能实时追踪频率变化,估计出对应频率,而FFT和比值校正FFT需要等待信号采集,无法做出实时的响应,对于短时的频率变化无法察觉,因而VSSUPG陷波器更适合于齿轮箱啮合频率的在线实时估计,且在多数情况下,驱动的转速范围和齿轮结构参数均为已知量,可作为先验信息用于滤波器参数的初始值设定,从而降低VSSUPG陷波器估计第一个频率所需的时间,齿轮系统振动信号包含多种频率成分,可根据先验信息采用滤波器进行滤除以提高待估计信号信噪比,从而得到更好的估计精度。

(a) 70 rad/s
(b) 95 rad/s
4 齿轮箱啮合频率估计
接下来将VSSUPG自适应陷波器应用在齿轮传动系统啮合频率实时估计上,齿轮箱运行过程由于动态激励产生的振动信号主要频率成分为齿轮副的啮合基频及其倍频,其中啮合基频是齿轮系统振动主动控制需要获取的主要参考信号[20]。设计二级齿轮箱如图6所示。齿轮副采用标准直齿圆柱齿轮,其中高速轴齿轮齿数为19,中间轴大齿轮齿数为37,中间轴小齿轮齿数为23,低速轴齿轮齿数为35。
二级齿轮箱有两对啮合齿轮,从而有两个啮合基频,采用如图7所示的级联自适应陷波器组分别估计两个频率。这是因为当带宽因子ρ接近于1时,陷波器Ⅰ和陷波器Ⅱ的陷波带宽极小,不存在互相重叠的部分,采用陷波器Ⅰ和Ⅱ各自的输出y1和y2而不是级联陷波器组的总输出y对各自系数进行调整,可使陷波器收敛于不同的局部极小值,从而陷波器Ⅰ可滤除输入信号中的一个正弦分量,剩余的信号被传递给陷波器Ⅱ以对另一个正弦分量进行滤除,使得级联自适应陷波器组能对多个频率分别进行估计。

1-二级齿轮箱; 2-制动器; 3-加速度传感器; 4-信号采集器; 5-电机; 6-调速器; 7-PC
图6 二级齿轮箱与振动加速度信号采集系统
Fig.6 Two-stage gearbox and vibration acceleration signal collection system

图7 级联VSSUPG自适应陷波器组
将加速度传感器固定在齿轮箱体上,用信号采集系统采集振动加速度信号。在多数情况下,电机能达到的最高转速都为已知量,可作为先验信息,在本试验中,电机转速上限为1 200 r/min,根据传动比可以得出啮合基频不超过400 Hz,采用低通滤波器滤除400 Hz以上的高频成分以提高待估计信号信噪比,得到的二级齿轮箱振动加速度信号如图8所示。计算所采集的振动加速度信号的功率谱密度,结果如图9所示。可见在此转速下低速齿轮副啮合基频为200 rad/s,高速齿轮副啮合基率为303 rad/s。
由于自适应陷波器以使输出信号取得最小值为准则调整系数,因此VSSUPG陷波器Ⅰ估计的频率具有较大功率,信噪比较高,设置参数为ρ=0.9,γ=0.95,β=0.000 01,μmax=0.000 01,μmin=0.000 001;VSSUPG陷波器Ⅱ估计的频率功率较小,信噪比较低,设置参数为ρ=0.9,γ=0.98,β=0.000 005,μmax=0.000 01,μmin=0.000 001,根据电机转速上限为1 200 r/min的先验信息,设置陷波器参数的初始值a0=-1,保持驱动电机的转速不变,将加速度传感器通过信号采集器输出的振动加速度信号经过低通滤波器滤波后,作为VSSUPG自适应陷波器组的输入信号,以估计两个啮合基频。

图8 二级齿轮箱振动加速度

图9 振动加速度信号频域分布
试验结果如图10所示。其中图10(a)为VSSUPG陷波器Ⅰ的估计频率,图10(b)为VSSUPG陷波器Ⅱ的估计频率。由图10(a)可知,陷波器Ⅰ在0.5 s内达到收敛,由于驱动电机转速和制动器的轻微变动,估计频率在200 rad/s附近变动,与功率谱计算结果相符;在图10(b)中,陷波器Ⅱ在1.2 s内达到收敛,估计频率在303 rad/s附近变动,与功率谱计算结果相符。对比图10(a)和图10(b),可以看出,在0~0.5 s内,陷波器Ⅰ与陷波器Ⅱ的估计频率均趋向200 Hz,在0.5~1.2 s内,陷波器Ⅰ的估计频率处于稳定状态,陷波器Ⅱ的估计频率趋向300 Hz,即在陷波器Ⅰ完成第一个基频的估计,滤除了输入信号中包含的该频率成分后,陷波器Ⅱ才通过残余信号对另一个基频进行估计,从而级联陷波器组所需迭代至收敛的时间是陷波器Ⅰ估计第一个基频所需迭代时间与陷波器Ⅱ估计第二个基频所需迭代时间的叠加。这种时间上的叠加属性,使得各串联VSSUPG陷波器因为高收敛速度而节省的迭代时间得到累积,因此在基于级联陷波器组估计多级齿轮传动系统多个啮合基频的应用中,采用VSSUPG算法更具优越性。

(a) VSSUPG自适应陷波器Ⅰ估计频率

(b) VSSUPG自适应陷波器Ⅱ估计频率
5 结 论
(1) 提出一种VSSUPG算法用于调整二阶IIR自适应陷波器系数,解决了PG、MPG和UPG三种算法不能满足齿轮系统振动信号频率估计中对高收敛速度和低稳态误差的同时需求的不足。对于同一输入信号,VSSUPG陷波器的收敛速度比MPG算法快67%,且具有比UPG算法更低的稳态误差,仿真结果验证了VSSUPG算法在收敛速度和稳态误差上具有更好的性能。
(2) 在不同信噪比下比较VSSUPG陷波器与FFT和比值校正FFT频率估计的响应特性,结果VSSUPG陷波器对信噪比大于10 dB的信号具有比FFT更好的估计精度,对信噪比大于15 dB的信号具有比比值校正FFT更好的估计精度,同时VSSUPG陷波器对频率的变化具有更好的追踪性能,适用于齿轮振动主动控制中通过实时采集的振动信号在线估计啮合频率的应用。
(3) 设计了由两个VSSUPG陷波器串联构成的级联自适应陷波器组,应用在二级齿轮传动系统的啮合基频实时估计上,结果显示级联陷波器组能分别对两个啮合基频进行有效的估计,且对频率变化有较灵敏的反应。同时级联陷波器组所需迭代至收敛的时间是各串联陷波器估计对应频率所需时间的叠加,从而VSSUPG算法的高收敛速度在级联陷波器组对多级齿轮箱振动信号多个频率估计的应用中更具有优越性。