基于免疫调节机制的参数自整定模糊控制器设计
2019-06-13刘宝叶会会蔡梦迪
刘宝,叶会会,,蔡梦迪
(1.中国石油大学(华东)信息与控制工程学院,山东 青岛,266580;2.中国电子科技集团第四十一研究所 青岛兴仪设备有限责任公司,山东 青岛,266510)
在实际工业生产过程中,常存在很多复杂的控制系统,它们通常具有大惯性、非线性及时间延迟等特性。由于目前仍难以建立这些复杂对象的精确数学模型,致使基于模型的传统控制方式难以取得理想的控制效果。模糊控制具有不依赖模型、适应能力强、鲁棒性强等特点,在解决复杂控制系统问题改善控制性能方面得到了广泛的应用[1]。但是,常规的模糊控制算法存在控制器参数和模糊规则一旦确定,不能根据工况变化而自适应在线调整影响控制效果和稳态精度较低等缺陷。针对上述问题,郭荣艳等[2-3]利用遗传算法离线优化模糊控制器参数;陈建良等[4]利用蚁群算法离线优化模糊控制器中的控制规则。但这些优化算法的寻优速度较慢,不能满足被控对象实时在线自适应控制的需求,并且这些优化算法依赖于模型,对于无法建模的被控对象并不能取得较好的优化效果。万艳玲等[5]结合双线插值算法提出一种基于在线插值的模糊控制系统,该方法虽然提高了模糊控制精度,但实现过程中需要结合控制规则表,计算不够简便。生物免疫系统是一个精细、复杂和完备的防御系统,具有较好的自适应性、鲁棒性以及免疫记忆、免疫自调节等特点。自20世纪90年代末以来,受生物免疫系统的启发,人工免疫系统得到了迅速的发展,基于免疫机理的智能控制器和智能算法相继出现。丁永生等[6]基于生物免疫系统反馈机理并结合模糊控制原理设计了一种新颖的模糊自调整免疫反馈控制系统,通过仿真证明了所设计控制器相比于传统控制器能够获得更优越的控制性能。李远贵等[7]利用免疫系统中的克隆选择原理来优化模糊控制器参数以实现自适应模糊控制。谭英姿等[8-11]提出了基于免疫模糊PID改进控制器。另外,彭鹏菲等[12-14]提出了基于粒子群算法或其他机制的参数自适应模糊控制系统。但是,这些算法在解决模糊控制技术的自适应性和控制精度方面仍存在一些不足,需要进一步研究和完善提高。本文作者针对传统模糊控制器参数在控制过程中不能自适应调整和稳态精度较低等问题,基于生物免疫系统中的免疫响应过程中 T细胞的调节作用和免疫提呈机制,提出一种免疫模糊控制器参数自整定方法和控制精度提高算法,从而提高其模糊控制性能。
1 生物免疫系统调节原理
免疫系统是机体执行免疫应答及免疫功能的重要系统,具有识别和排除抗原性异物、与机体其他生理系统相互协调,共同维持机体内环境稳定和生理平衡的功能。免疫系统所执行的免疫应答是指T细胞与B细胞等淋巴细胞识别抗原,产生激活、增殖与分化等应答,并将抗原灭活及清除的全过程[6]。免疫应答包括细胞免疫和体液免疫2种。其中,体液免疫的应答过程主要是通过 T细胞不同亚群间的相互作用完成的[7]。T细胞分为辅助细胞 TH和抑制细胞 TS,TH和TS细胞分别对B细胞起激活作用和抑制作用。进入机体的抗原被抗原呈递细胞(APC)处理后,首先活化TH细胞,并释放淋巴因子,进而活化B细胞产生抗体,APC呈递的抗原还能缓慢的活化TS细胞,活化的TS细胞对TH细胞和B细胞产生抑制作用,以此来保证免疫系统的快速而又稳定消灭入侵的抗原。T细胞的调节作用如图1所示,具体应答过程如下。
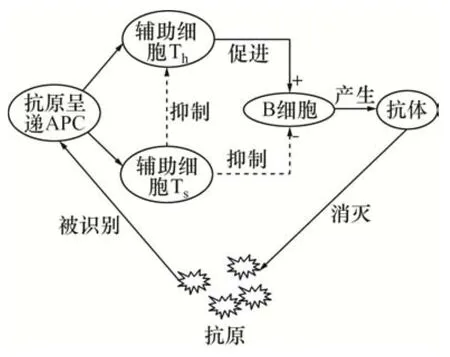
图1 体液免疫过程Fig.1 Process of humoral immunity
1)免疫抗原提呈。在免疫应答发挥作用前期,需要机体的免疫系统对体内的物质进行自身和非自身的辨别,这一辨别过程称为免疫识别。实际上,这种识别通过抗原提呈机制来完成。抗原提呈是指入侵体内的抗原被抗原提呈细胞摄取,加工后以免疫性肽的形式呈现于提呈细胞表面,最终被免疫活性细胞识别的过程。抗原提呈在机体的免疫应答过程中起着十分重要的作用,能摄取、加工、处理抗原并将抗原提呈给T淋巴细胞,然后,通过T细胞的调节产生抗体完成抗原的消灭过程。
2)T细胞反馈调节。在免疫响应过程初期,抗原数量较大,T细胞主要起促进作用,促进B细胞的活化以产生较多的抗体快速地消灭抗原;免疫响应后期,随着抗体数量的增多,抗原被消灭数量减少,T细胞主要起抑制作用,抑制B细胞的活化,减少抗体的分泌,维持免疫系统的稳定性。
2 基于免疫调节机制的参数自整定智能模糊控制器设计
上述的免疫系统调节过程与工业生产中的控制过程有很多相似之处。如在控制初期阶段,希望控制系统的响应输出能够快速的接近期望值,即减小系统动态性能中的上升时间;在控制中期阶段,希望控制系统的响应输出能够在不产生超调的情况下快速达到系统的稳定工作状态,即减少系统超调量和缩短控制过程的调节时间。为使控制系统取到较好的动态性能,需要控制器参数能够在不同控制时期进行自整定。本文提出一种基于免疫系统调节机制的参数自整定模糊控制算法(简称免疫模糊自整定控制算法),利用免疫调节的T细胞调节原理设计控制器参数自适应变化规律。同时,针对在模糊控制系统的稳态控制阶段存在控制器灵敏度差和控制精度低等问题,借鉴免疫系统调节过程中的抗原提呈原理,对系统偏差进行提呈处理,并进一步调整控制器参数,从而使模糊控制器可以更好地识别控制偏差和提高控制精度。因此,进一步设计该免疫模糊自整定控制器的体系架构如图2所示,主要包括动态调节模块、稳态调节模块以及主控模块3部分。
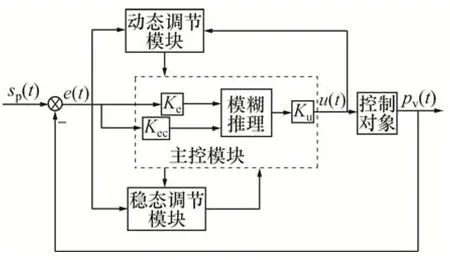
图2 参数自整定智能模糊控制系统结构Fig.2 Architecture of parameter self-tuning fuzzy control system
其中,主控模块为模糊控制的核心,在该模块中建立模糊规则库以及设置隶属度函数,对输入偏差及偏差变化进行模糊化、模糊推理、清晰化操作从而得到控制器输出并作用于被控对象;动态调节模块依据T细胞调节原理中的促进与抑制作用来整定主控模块的量化因子和比例因子,使其能够随着偏差作自适应改变;稳态调节模块利用抗原提呈作用对偏差进行非线性处理并根据动态调节模块的参数整定方法整定主控模块的参数值。在该控制器中,控制器的输入为控制系统的设定值sp(t)与工艺对象输出值pv(t)的偏差e(t),该偏差相当于入侵免疫机体的“抗原”;控制器的待整定参数Ke,Kec和Ku相当于B细胞的浓度,其中Ke,Kec和Ku分别为偏差、偏差变化率和控制器输出论域的比例量化或比例因子;控制器的输出值u(t)相当于体液免疫为消除抗原所产生的“抗体”。
2.1 主控模块
为了实现主控制模块的核心控制作用,其主体采用二维模糊控制器,偏差e(t)和偏差变化率Δe(t)作为控制器输入,控制器输出为u(t)。
模糊控制器通过量化因子对输入量进行尺度变换将清晰量转换成模糊量,依据被控对象的特性和人工经验设计模糊控制规则,根据模糊规则对模糊输入进行模糊逻辑运算得出模糊输出,并利用比例因子进行尺度变换为实际控制清晰量[1]。除模糊控制规则对控制效果影响较大外,合理设置模糊控制器的量化因子和比例因子同样也很重要。一般来讲,控制器参数对控制系统性能影响规律如下[13]。
1)量化因子Ke影响规律:当Ke选的较大时,控制系统上升速度加快,上升时间变短,但可能产生超调从而使得系统调节时间加长;Ke选择过小会导致系统上升速度减慢,可能使系统产生震荡,严重时可使系统变得不稳定。
2)量化因子Kec影响规律:Kec越大,系统超调越小,但是会降低系统的响应速度。
3)比例因子Ku影响规律:比例因子直接影响控制器的输出。Ku选择越小,动态调节过程越慢,但系统超调减小;反之,动态响应速度越快,但超调量会增大,也可能引起系统振荡。
比例因子Ku直接影响控制器的输出,量化因子Ke和Kec影响输入偏差和偏差变化的不同加权程度,并且两者的取值变化对控制性能的作用也是相互影响的。因此,若控制器能够在系统整个调节过程中实现参数自整定或自适应,则会在一定程度上提高模糊控制器的控制性能。
2.2 动态调节模块算法设计
在控制系统的动态调节过程中,一般要求在保证系统稳定的前提下能够快速消除偏差。如果在系统控制过程中控制器参数保持不变,控制系统可能得不到令人满意的动态性能。动态调节模块算法可以使得控制器参数能够在系统响应的不同时期实现自整定以提高模糊控制性能。由于在生物免疫应答的不同阶段,TH细胞和TS细胞发挥不同作用可以迅速调节B细胞的浓度,从而产生抗体来快速和稳定地消灭抗原。因此,可以借鉴该生物调节机制来设计模糊控制器的参数自适应调整规律,以增强模糊控制的自适应能力。
2.2.1 T细胞调节规律
根据图1所示,在抗原的入侵时B细胞即受到TH细胞的活化作用,也受到TS细胞的抑制作用。设第t代的抗原浓度为ε(t),受抗原刺激后TH细胞的输出为TH(t),TS细胞对B细胞的影响为TS(t),则B细胞的浓度S(t)为[6]:

其中:
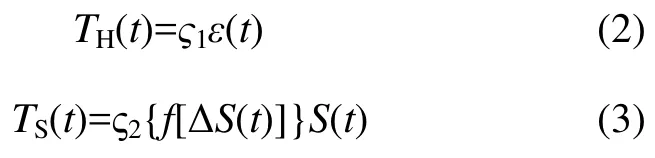
式中:ς1为 TH细胞的促进因子;ς2为 TS细胞的抑制因子;ΔS(t)为B细胞浓度变化;f(·)为一非线性函数,与B细胞浓度有关,表征细胞抑制或刺激的能力。由式(3)可得B细胞浓度与抗原浓度关系式如下:

其中:η为促进与抑制作用的比例系数,η=ς2/ς1。
2.2.2 模糊控制器参数自整定算法设计
受免疫系统的应答过程调节机制启发,把模糊控制系统的偏差e(t)对应于抗原浓度ε(t);把控制器参数对应于 B细胞浓度S(t);把控制器输出非线性反馈f(Δu(t))对应反馈抑制作用。参考式(4)所示免疫系统反馈调节规律,设计模糊控制器参数Ku(t),Ke(t)和Kec(t)的自调整算法如下:
式(5)~(7)相比于式(4)所示的TS细胞调节规律,增加了一个调节因子λ。其取值分别为[-1,0,1],需要根据对应系统响应阶段设定对应λ。K1,K2和K3相当于TH细胞的促进作用系数。
当|e(t)|>e1时,代表响应初期阶段。为了快速消除偏差,令λ=-1,从而使Ku和Ke较大,Kec较小,最终加快系统上升速度,缩短上升时间。
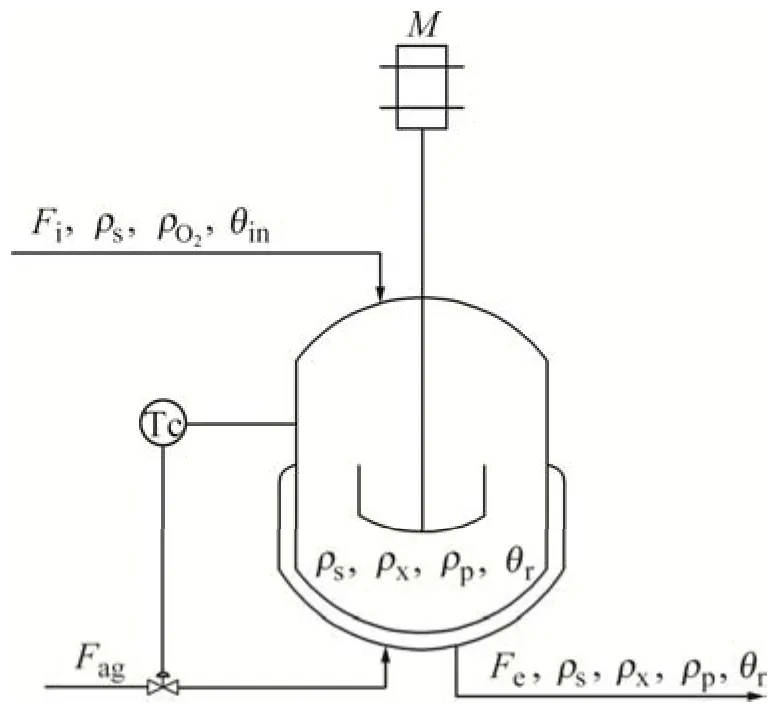
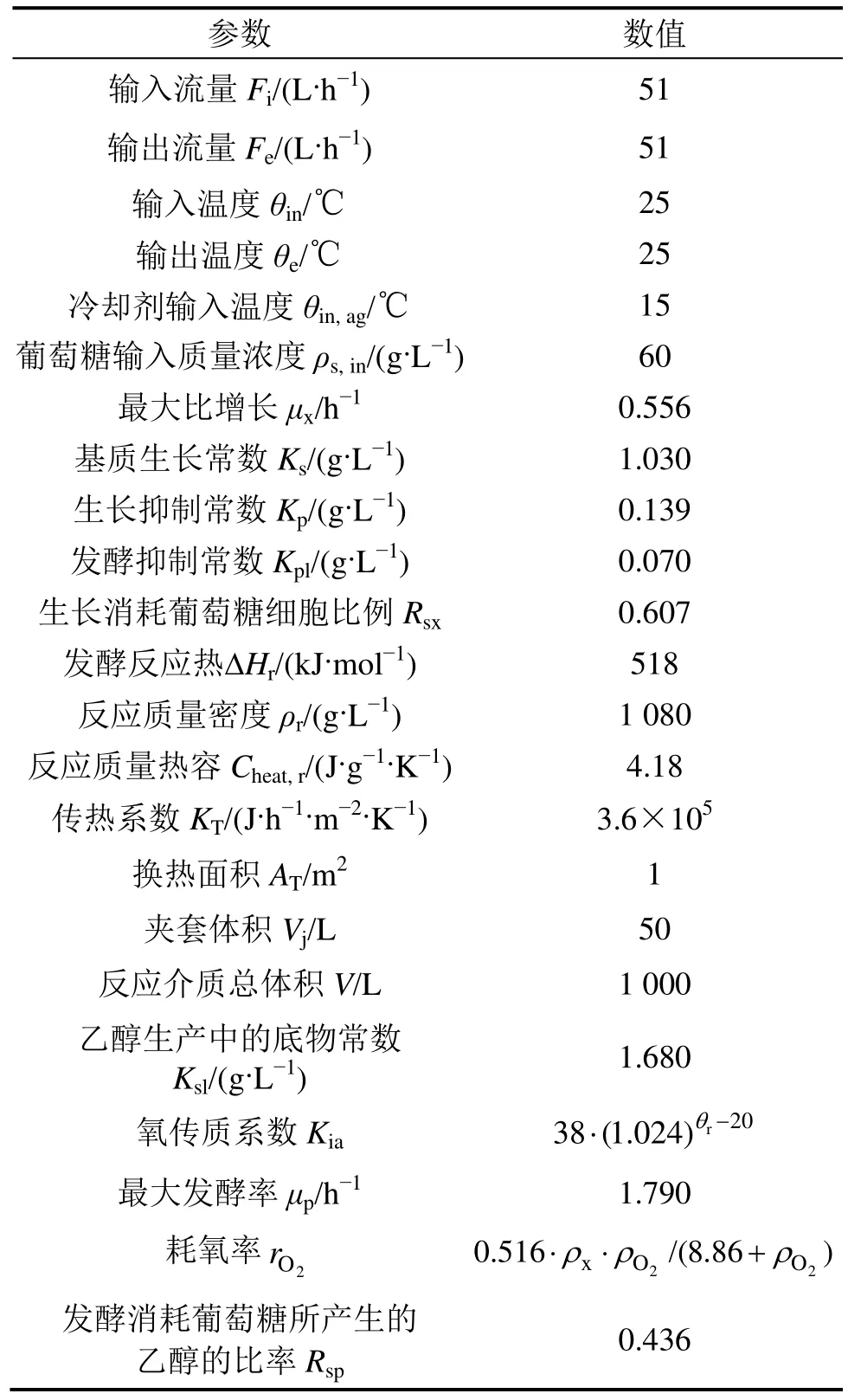
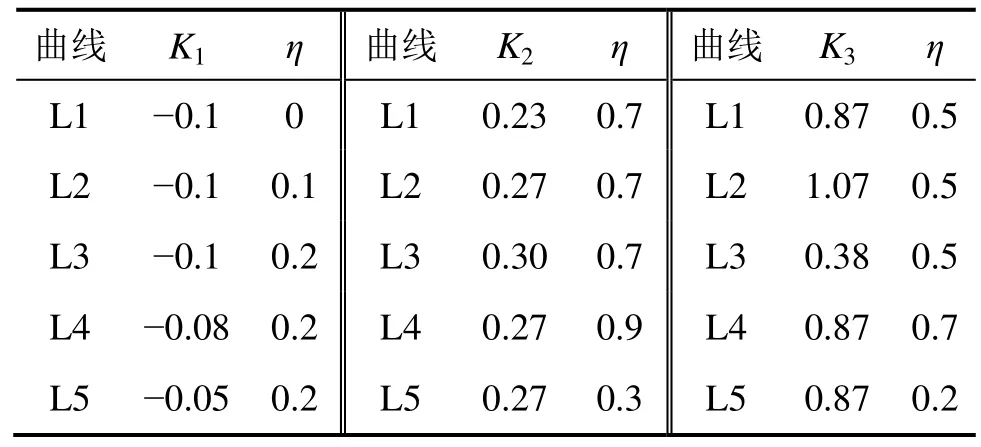
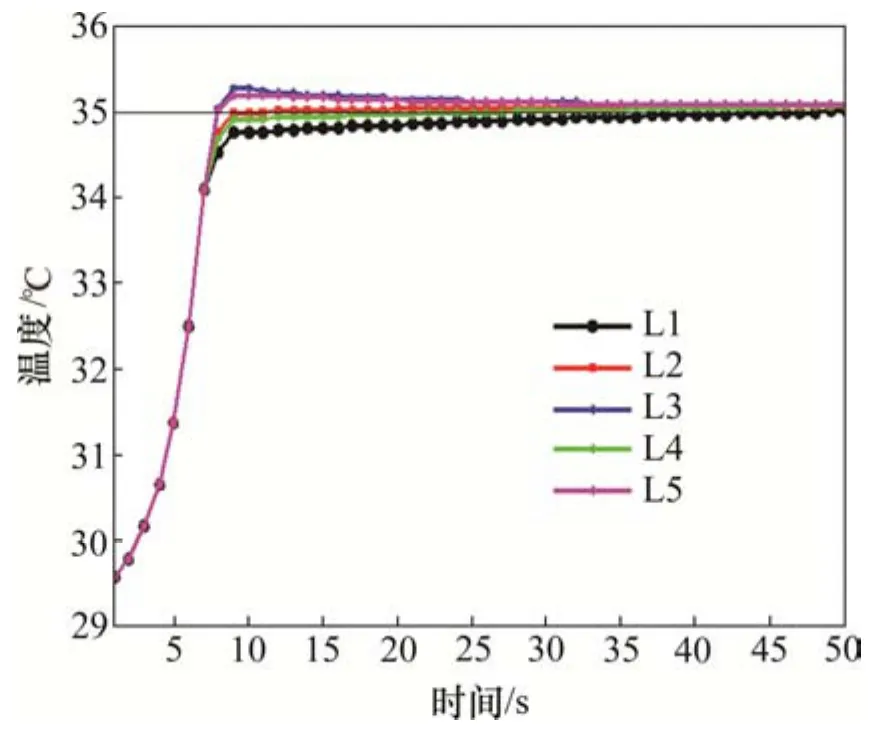
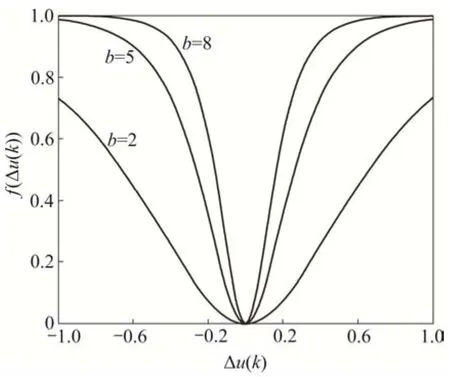
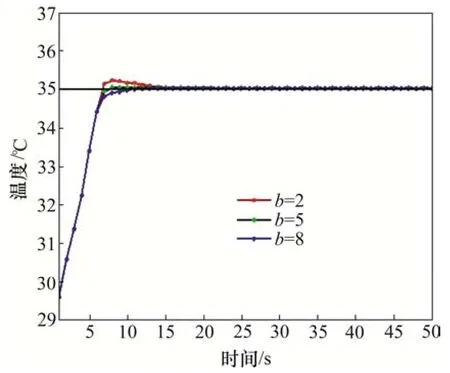
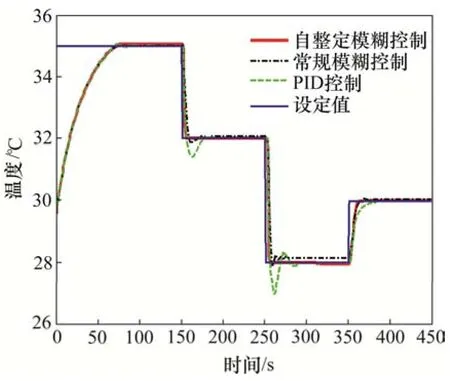
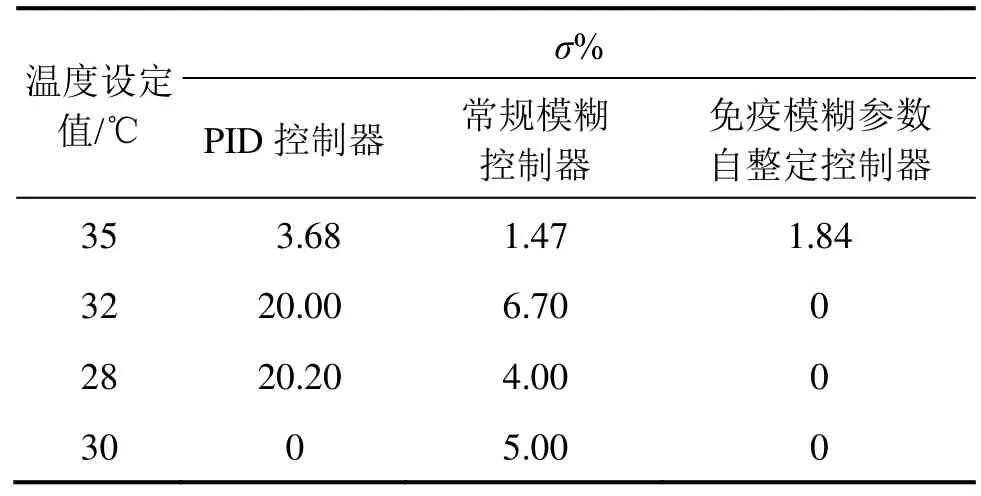
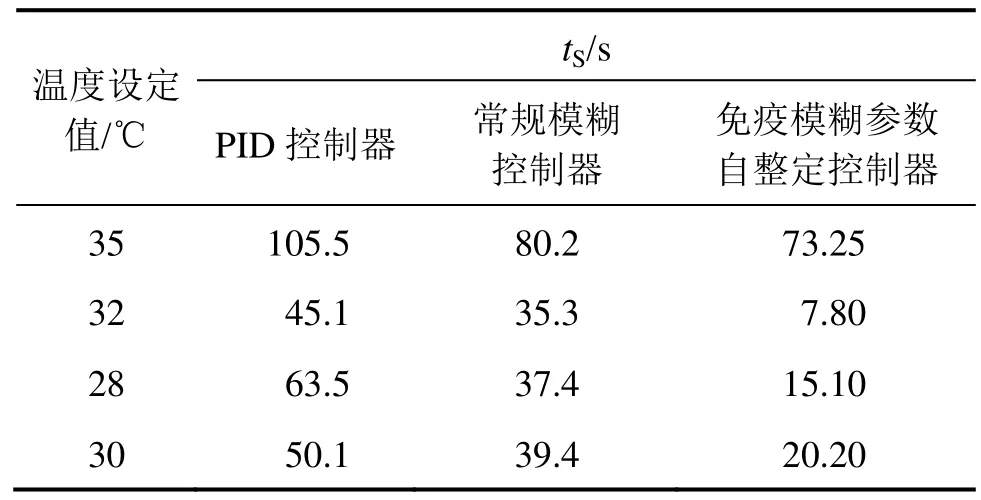
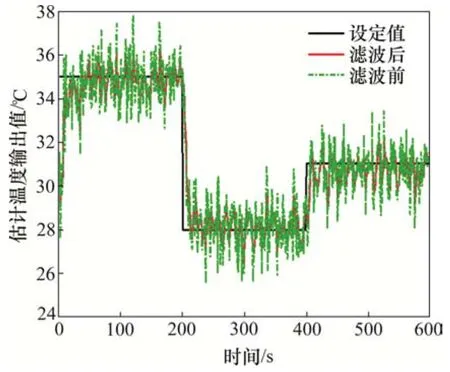
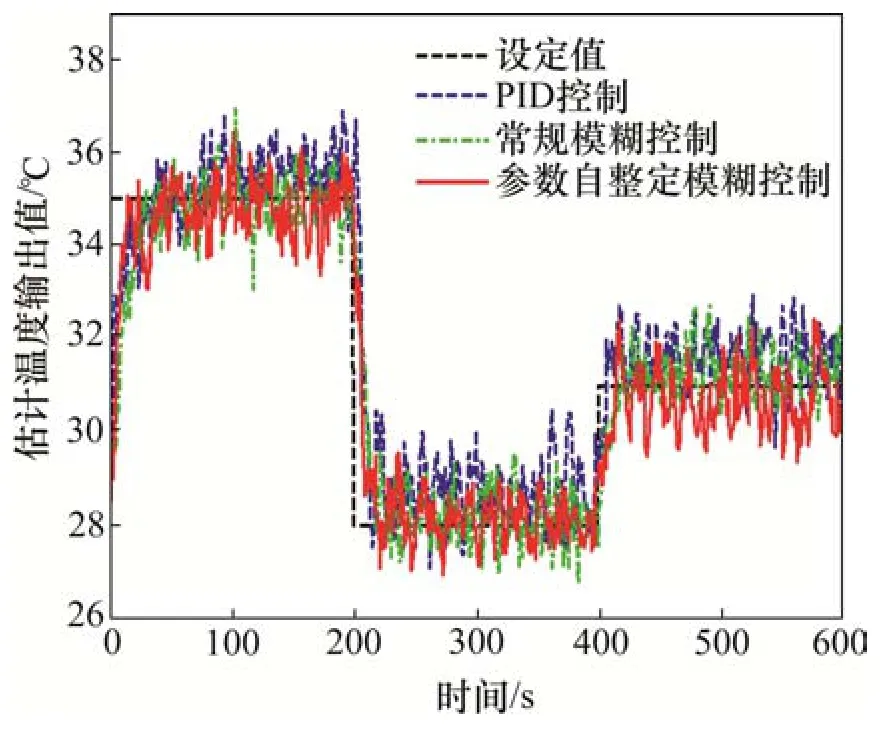
当e2<|e(t)| 当|e(k)| 在式(5)~(7)中,参数K1,K2和K3可以控制系统的响应速度,参数η影响系统响应的稳定性。K1,K2,K3和η取值的不同组合可以产生不同的控制效果。如果合理选择上述调节参数,可使控制系统获得较短的上升时间和较小的超调量。另外,非线性函数f(·)可以设计如下: 其中:b为控制器变化量的作用系数。显然,当Δu(t)=0时,非线性函数输出为0,即f(Δu(t))=0。 该动态调节模块整定主控模块的量化因子和比例因子的过程为:当控制偏差较大时,调整Ku和Ke较大以及Kec较小,使得被控变量快速接近目标值;当被控变量接近目标值时,调整Ku和Ke减小以及Kec增大,从而抑制超调量;当控制偏差较小时,调整Ku,Ke和Kec稳定在某一值以维持系统稳定。利用动态调节模块的控制器参数自整定算法,克服了常规模糊控制器参数不能自适应改变的缺陷,提高了控制器的动态性能。 由于常规模糊控制系统在稳态响应阶段,控制偏差e(t)和偏差变化Δe(t)都很小。此时,模糊子集的分辨率较低,使得控制灵敏度降低而影响控制精度。为解决该问题,受免疫系统的抗原提呈机制启发,设计稳态调节模块算法以对控制偏差信息(对应于抗原)进行提呈放大处理,以获得较高的控制精度。 2.3.1 控制偏差提呈 为了实现免疫模糊控制器的偏差提呈处理,需要根据控制偏差的绝对值(对应抗原的特征)进行针对性处理[15]。假设控制偏差不含噪声或仅有很小噪声存在,当标量化后的控制偏差(|e(t)|≤1)满足|e(t)|<σ1(0≤σ1≤0.05)且|e(t)|<σ2(0≤σ2≤0.01)时,需要对其进行非线性放大处理;当控制偏差处于其他状态时,控制偏差保持原状态不作处理。当控制偏差被提呈放大处理后,控制器的控制作用增强,控制灵敏度提高。对偏差的非线性处理措施如式(9)和(10)所示。 其中:F(e(t))为关于控制偏差e(t)的非线性函数;E(t)为提呈后的控制偏差即放大处理后的偏差;σ1和σ2分别为偏差和偏差变化的阈值。提呈函数F(e(t))设计如下: 其中:α和β为共同决定控制偏差为零时的最大提呈倍数α/(1-β),一般取1≤α≤10,0<β<1。对偏差进行提呈放大处理后,再依据动态调节模块算法中响应末期的算法规律整定模糊控制器参数,从而提高模糊控制器的稳态精度。 考虑到实际控制过程中,经常会存在一些控制噪声和测量噪声且会对控制系统产生影响。为了使控制器能更好地识别正常控制偏差,降低由噪声放大产生的剧烈影响,需要考虑在免疫提呈过程中增加抗干扰处理措施以保证控制精度不受影响。 2.3.2 免疫提呈抗干扰设计 为了实现在免疫提呈过程中降低噪声信号的干扰影响,需要设计免疫提呈抗干扰措施。生物免疫提呈过程中,仅对抗原进行提呈而对非抗原不进行提呈处理,从而提高病毒抗原提呈识别效果并被迅速消灭。受该机制启发在本文控制器设计中加入卡尔曼滤波器,对控制偏差抗原进行滤波处理以提高抗干扰能力。 卡尔曼滤波器是一种最优线性状态最优估计方法,采用信号与噪声的状态空间模型形成一个实时递推算法,分为预测和校正2部分。预测是根据系统状态方程建立对当前状态的先验估计,及时向前推进当前状态变量和误差协方差估计值;校正是利用观测方程在预估过程中的先验估计值及当前测量值的基础上建立当前状态的后验估计。设A,B和C为系统模型矩阵,则卡尔曼滤波的离散化数学模型如下[16-18]: 其中:x(t)为t时刻的系统状态;u(t)为k时刻对系统的控制量;y(t)为t时刻的测量值;W(t)和V(t)分别为控制和测量的噪声矩阵,且满足: 卡尔曼滤波过程具体步骤如下。 1)预测t时刻状态的先验估计值: 其中:x(t-1|t-1)为状态变量在t-1时刻估计值;x(t|t-1)为状态变量在t时刻的先验估计值。 2)计算t时刻误差的协方差先验估计矩阵: 其中:P(t-1|t-1)为t-1时刻误差协方差的估计矩阵;P(t|t-1)为t时刻误差协方差的先验估计矩阵。 3)求得t时刻的卡尔曼增益矩阵: 其中:Kg(t)为t时刻的卡尔曼增益矩阵。 4)校正t时刻状态变量后验估计值: 其中:x(t|t)为t时刻状态变量的后验估计值。 5)校正t时刻误差协方差后验估计矩阵: 其中:P(t|t)为t时刻误差协方差的后验估计矩阵。 经卡尔曼滤波处理后的输出信号,即作为系统测量值反馈值,并与输入设定值比较产生偏差和偏差变化,同时作为本文设计的参数自整定模糊控制器的输入信号。 针对非线性对象滤波实际应用,必须构建被控对象的状态模型以得到A,B和C系统模型矩阵,从而获得各个时刻的状态预测值。针对非线性被控对象,本文采用多工作点阶跃响应两点辨识方法,得到每个工作点的一阶纯滞后近似工艺模型[19]: 其中:K(t)为放大增益;T(t)为时间常数;τ(t)为滞后时间。将上述模型转化为状态空间模型并离散化,即可获得卡尔曼滤波所需要的系统模型实时矩阵A,B和C。 通过稳态调节模块对系统稳态阶段的控制偏差进行提呈放大处理,使得主控模块更好地识别控制偏差,增强模糊控制器的灵敏度,从而提高控制系统的稳态精度。同时,该模块加入卡尔曼滤波作用以降低提呈过程中噪声信号的干扰,提高控制系统的抗干扰能力。 当控制系统出现控制偏差时,主控模块产生控制输出。为提高响应速度和减小超调量,同时利用动态调节模块设计的参数调整规律自适应调整主控模块的参数Ke,Kec和Ku。控制系统响应进入稳态阶段后,为减小稳态误差,提高控制精度,利用稳态调节模块对控制偏差进行提呈处理。此时,主控模块的参数Ke,Kec和Ku仍然使用动态调节阶段设计的参数调整规律。另外,若控制系统存在控制噪声和测量噪声,则卡尔曼滤波器发挥作用来减弱噪声的干扰,保证控制系统的稳定运行。通过免疫模糊自整定控制器各模块的分工协调工作,控制系统最终获得令人满意的控制效果。 为了检验免疫模糊自整定控制的控制效果,选择如图3所示的生物反应器作为被控对象。该工艺对象为目前应用比较广泛的生物酒精发酵过程,其产品乙醇可作为部分新能源替代品[20]。在图3中,ρs为葡萄糖质量浓度;ρp为乙醇质量浓度;Fag为冷却剂流量;Tc为温度控制器;θm为进料温度;θr为反应器温度;θe为出料温度;Fi为进料流量;Fe为出料流量;θag为夹层里冷却剂的温度;ρO2为进料液态氧的溶解质量浓度;为液态氧的平衡质量浓度。该生物反应器是1个时间常数和增益随工作点变化而实时变化的强非线性化学反应过程,利用传统控制算法往往难以获得理想控制效果。 图3 生物反应器工艺流程Fig.3 Bioreactor process 该生物反应器的机理模型如下式所示[20]: 式(21)模型中所有参数含义及取值如表1所示。 表1 生物反应器模型参数值Table 1 Value of bioreactor model parameter 对于该生物反应器的温度控制对象,本文采用在多个温度工作点阶跃响应辨识方法建立其时变一阶滞后传递函数模型,并转化得到卡尔曼滤波所需要的预测模型参数。最后通过Matlab中的曲线拟合工具得到该生物反应器温度的时变模型如下式所示: 为了测试辨识得到模型的动态性能和模型精度,对原机理模型和辨识模型施加相同的阶跃输入信号,进行实际输出与辨识模型输出的对比,求得辨识出的模型的均方误差为0.071 8,式(22)辨识模型能够较好地跟踪式(21)原机理模型输出,满足模型精度的要求。 对于本文提出的免疫模糊自整定控制器,免疫参数K1,K2,K3和η取值的不同组合以及式(8)中非线性函数f(·)中b的取值等,对控制效果会产生不同的影响。因此,在实际应用该免疫模糊控制器前,需要测试这些免疫参数的作用特性。 3.3.1 免疫参数K1,K2,K3和η的作用分析 将生物反应器的温度作为控制对象,并将温度设定值设置为35℃。在保证控制器其他参数一致的前提下,分别针对控制器参数Ku,Ke和Kec自整定表达式(5)~(7)中的免疫参数K1,K2,K3和η不同组合值(如表2所示),对控制性能的影响进行仿真实验。具体仿真实验结果如图4~6所示,其中各图中5条曲线L1~L5分别代表K1,K2,K3和η取不同值时(如表2所示)的控制效果。 1)对于比例因子Ku,图4中的曲线对比结果表明:在控制器的其他参数保持一致的前提下η越大时,控制系统的超调量越小;当K1的绝对值越大时,控制系统响应速度越快。 表2 免疫参数设定值Table 2 Setting value of immune parameters 图4 免疫参数K1和η影响作用对比Fig.4 Comparison of immune parameters K1 &η 图5 免疫参数K2和η影响作用对比Fig.5 Comparison of immune parameters K2 &η 图6 免疫参数K3和η影响作用对比Fig.6 Comparison of immune parameters K3 &η 2)对于量化因子Ke,图5中的曲线对比结果表明:η较大时,控制系统的超调量较小;K2越大时,控制系统响应速度越快,调节时间也有所减短。 3)对于量化因子Kec,相比于Ku和Ke对系统控制效果的影响,Kec的作用规律有所不同。由图6可以得出:当η越小时,系统的超调量越小;K3越大,系统的响应速度反倒越慢,调节时间也因此变大。 因此,根据上述免疫参数变化影响规律,可合理调节各相关参数以提高控制效果。 3.3.2 免疫参数b的作用分析 图7所示为非线性函数f(⋅)的变化趋势。当式(8)中非线性函数f(⋅)中b的不同取值时,所对应的非线性变化曲线如图8所示。从图8可知:参数b取值不同对函数特性影响较大。当非线性函数表达式中的参数b取值不同时,f(⋅)的变化趋势也会发生改变(如图7所示),进而影响控制系统的超调量。 图7 非线性函数 f(⋅)的变化趋势Fig.7 Change trend of nonlinear function f(⋅) 由于f(⋅)代表细胞抑制或刺激的能力,b在一定程度上影响控制过程中抑制作用。随着b增大,抑制作用增强,系统超调量减小。当b为2,5和8时,所对应的控制效果对比如图8所示。 针对该生物反应器非线性温度控制对象,分别采用免疫模糊参数自整定控制器、常规模糊控制器和传统PID进行控制,并对比其对应控制效果。各控制算法的控制器参数设置如下。 1)传统 PID控制器参数分别设置为:KP=0.12,Ki=0.01,Kd=-0.20。 2)常规模糊控制器的参数为:量化因子Ke=2.45,Kec=0.01,比例因子Ku=-0.16。 图8 免疫参数b影响作用对比Fig.8 Comparison of influence of immune parameters b 3)参数自整定模糊控制器的参数设置为:动态调节单元参数为K1=0.3,η=0.2,b=5,K2=0.25,K3=0.01;稳态调节单元参数为σ1=0.3,σ2=0.1,α=3.5,β=0.5,K1=0.2,K2=0.25,K3=0.01,η=0.5。 控制仿真实验包括无干扰和存在噪声干扰 2部分。 1)无干扰控制效果。在该仿真实验过程时,控制系统的设定值先由 35℃变化到 32℃,再变化到28℃,最后为30℃。其控制效果如图9和图10所示。 无干扰情况下,3种控制器上升时间tr对比如表3所示,控制性能指标超调量σ%对比如表4所示,控制性能指标调节时间ts对比如表5所示,控制性能指标稳态误差ess对比如表6所示。从表3~6可以看出:相比于常规模糊控制器,免疫模糊参数自整定控制器和PID控制器的上升时间较短,稳态误差较小;但是,PID控制器的超调量和调节时间比常规模糊控制器和免疫模糊参数自整定控制器的大;免疫模糊参数自整定控制器的调节时间最短。 图9 反应器温度控制效果对比Fig.9 Comparison of control effect for reactor temperature 图10 控制输出对比Fig.10 Comparison of control outputs 表3 控制上升时间tr对比Table 3 Comparison of control arise time tr 表4 控制超调量σ%对比Table 4 Comparison of control overshoot σ% 表5 控制调节时间tS对比Table 5 Comparison of control adjustment time tS 表6 控制稳态误差ess对比Table 6 Comparison of control steady-state error 从图9和10可以看出:相对于传统的PID控制算法,免疫模糊参数自整定控制器能够在各种工况下不产生超调和更加迅速逼近控制目标温度,且其对应的控制上升时间、调节时间和超调量等动态性能指标明显比常规的模糊控制器的优,并且自整定模糊控制器克服了常规模糊控制器存在的稳态精度不高的缺陷,取得了较好的稳态性能,具体的各控制性能指标对比如表3~6所示。因此,基于免疫调节的参数自整定模糊控制算法的控制性能优于传统PID算法和常规模糊控制算法的控制性能。 2)抗干扰控制效果。为了检验免疫模糊参数自整定控制器的抗干扰控制能力,将式(22)辨识模型进行离散化处理,反应器温度θr作为卡尔曼滤波的状态变量。采用在反应器机理模型的工艺输出值上叠加噪声作为状态的实际测量值,由温度反应器的预测模型得到控制系统的预测输出值。仿真实验中分别利用上述3种控制算法控制该生物反应器温度对象,温度设定值先由35℃变化到28℃再到31℃,并采用Q=0.4和R=0.5的高斯白噪声来模拟系统噪声。由于初始协方差矩阵的取值对滤波效果的影响很小,只要其数值不为零则就能很快收敛到某一数值[21],故协方差矩阵的初始值P0设置为10。具体仿真对比结果如图11和12所示。 从图11可以看出:对于叠加噪声后的控制系统,免疫模糊参数自整定控制器在增加滤波处理功能之前,仅能够在一定程度上减少噪声的影响。由图 12可看出:加入滤波器后免疫模糊参数自整定控制器的控制效果要比其他2种控制算法的优。本文采用均方误差来评价滤波效果[21],免疫模糊参数自整定控制器的均方误差为0.284 7,常规模糊控制器的均方误差为0.319 8,PID控制器的MSE为0.387 2。因此,相对于常规模糊控制器和传统 PID,本文设计的免疫模糊参数自整定控制器具有较强的抗干扰能力。 图11 参数自整定模糊控制器滤波效果对比Fig.11 Comparison of filtering effects of parameter self-tuning fuzzy controller 图12 控制效果对比Fig.12 Comparison of control effect 1)本文在研究模糊控制器、分析模糊控制器优缺点的基础上,依据生物免疫系统的反馈调节机制和免疫提呈原理,设计了一种免疫模糊参数自整定控制器。 2)通过控制器参数的自适应变化使免疫模糊参数自整定控制器能够快速而又稳定的消除控制系统偏差的目的。另外,借鉴的抗原提呈机制设计稳态调节模块的提呈放大作用和抗干扰措施可以较好地克服常规模糊控制器稳态精度不高的缺陷。 3)将该控制器应用于生物反应器的温度控制对象,仿真实验表明本文所提出的免疫模糊参数自整定控制器不仅能提高控制系统的动态性能和稳态精度,而且提高了控制系统的抗干扰性能。 4)将来需要进一步研究生物免疫系统的微观复杂调节或反馈机制,以便设计更简便的模糊免疫控制器的控制参数调节方法,进一步提升控制性能和抗干扰能力。
2.3 稳态调节模块算法设计








2.4 免疫模糊自整定控制器整体工作过程
3 系统仿真及结果分析
3.1 仿真被控对象

3.2 生物反应器模型辨识

3.3 免疫控制参数的影响作用分析


3.4 控制效果仿真



4 结论