基于GPS相位差的炮弹滚转角测量方法
2019-06-13梁燊,王勇
梁 燊,王 勇
(江苏自动化研究所,江苏 连云港 222000)
0 引言
现代常规战争通过使用精确制导武器,实现了“脱离接触、远程打击”的非对称模式。精确制导技术已成为世界各国海、陆、空等各类武器不可或缺的重要技术。相对于其他发射及制导复杂的其他制导武器,制导炮弹具有较为简单的制导平台、发射机构、相对低廉的价格和毫不逊色的精度[1-4]。其中GPS制导弹药以其成本低廉、全天候、制导精度高、灵活好等优点,成为各国制导弹药研究的一项重要内容。
滚转角、滚转角速率等姿态数据的获取是精确制导武器实现飞行控制的一项重要技术。精确制导武器可利用获取的滚转角数据,控制相关变量,改变弹丸的飞行轨迹,增加弹丸飞行航程,提高命中精度等。通过对滚转角速率的调节,调整载体的横向漂移,实现载体坐标点的横向校正。针对滚转制导武器的姿态测量,目前国内外通常采用陀螺仪、全加速度计、太阳方位角传感器、星敏感器、地磁传感器、GPS等方法[5-10]。由于精确制导炮弹半径通常较小、所承受过载大、轴向转速高,因此,直接使用陀螺仪测量弹体滚转角存在困难。而太阳方位角传感器只能在天气晴朗、光线充足的白天使用,星敏感则是根据恒星星图进行工作的,二者均不能满足精确制导炮弹全天候工作的要求。地磁传感器容易受到地球磁场分布的影响,其弹体尺寸小,容易受到电磁脉冲的影响。无陀螺全加速度计姿态测量方法则存在模型过于复杂、计算量大的缺陷,同样不适用精确制导炮弹的姿态测量[11-12]。而由于GPS制导具有成本低廉、全天候,灵活性好等特点,正成为制导弹药所采用的一项重要技术。比较有代表性的是美国ATK公司的PGK制导组件,该组件使用GPS信号进行姿态控制和弹道修正,经过3个阶段的发展最终可使弹药制导精度达到20 m以内[13]。同时该组件能够较为方便地应用到普通弹药,方便了普通弹药的智能化升级。本文利用两个或多个GPS天线接收器的相位差信号,确立相位差量测与炮弹滚转角之间的关系,建立了一种基于GPS相位差量测的角速率及角度求取方法。
1 基于GPS的滚转角及角速率确定方法
如图1,假设弹丸上等距离安装四天线,四天线共用1个GPS接收机。载体GPS天线测量中心i到卫星Sj之间的距离所对应的载波信号相位,根据物理意义,载波相位观测方程简写成如下形式[14]:


图1 基线向量示意图
当天线1和天线2同时观测GPS卫星j时,根据式(1),可以同时获得两个载波相位观测方程,将这两个相位观测方程相减,可得到站际单差观测方程,它是GPS天线1和天线2同时观测到卫星j的载波相位的单差,由下式表示:
因为装于弹丸上天线共用1台GPS接收机,故天线1和天线2的GPS接收机钟差是同一个钟差:,同时弹丸上的天线之间的距离相当短,由GPS卫星j到基线两端天线的载波相位传播路径几乎相同,其传播误差近似相等:。所以式(2)可以写成如下形式:



滚转角速率可以表示为

2 基于相位差量测的扩展Kalman滤波方法
以下给出求取旋转平台上滚转角速率和滚转角度Kalman滤波过程。其中为状态向量,包含滚转角度和滚转角速率,滤波的状态方程为:

其中,ac为控制项滚转加速度,n(t)为滚转加速度的白噪声。

滤波过程如下:
以上Kalman滤波过程的每一步运算都对所有相位差的量测进行更新,即是对四维量测的每个元素进行一次更新。同理,当对相位差进行Kalman滤波时,量测的每个元素都进行更新。注意到,随着时间的变化,有效量测量的个数也在不断地变化,这将导致m、H、K、R等的变化。为简化问题和方便处理,一般采用每次处理一个量测元素、重复量测更新过程的方式进行处理。
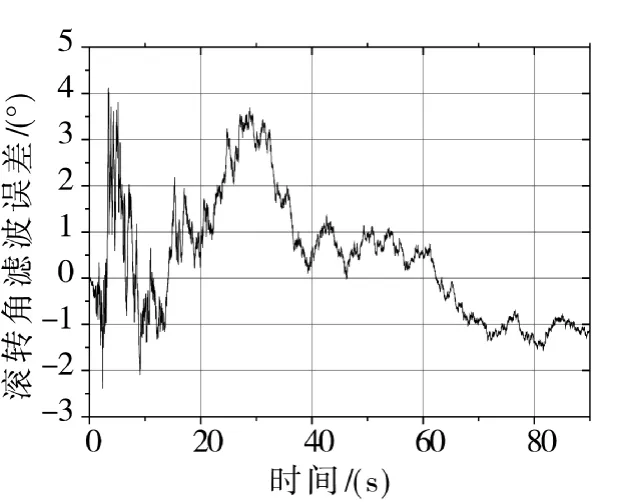
图2 300 Hz滚转角滤波误差

图3 300 Hz滚转角速率下角度滤波误差
为保证滚转角度数据的连续性,对相位差量测数据作如下处理:对于1、2天线的滚转角度为φR,相位差量测值为;,,4、1通道的相位差为为旋转角度。
3 仿真校验
本部分仿真校验,采用数字仿真的方法,模拟载体高转速情况下天线接收信号的载波相位,并验证滚转角的测量方法[15]。角速率作为弹体的滚转角速率真值,模拟GPS接收信号,提取信号的幅值和载波相位信息,将这些信息送入滚转角滤波器,估计所需控制时刻的滚转角。在仿真中,相位差量测误差标准差定为,EKF更新时间为0.1 ms。以下分别给出了300 Hz和20 Hz滚转角速率下的仿真结果,如图2~图5所示。
图2~图5分别给出了滚转角速率为300 Hz和20 Hz条件下,角度和角速率滤波误差,这说明基于GPS相位差量测的角速率及角度求取方法能够获得滚转角度和滚转角速率。当误差标准差为,滚转角估计的均方根误差能够为1.32°。

图4 20 Hz滚转角滤波误差
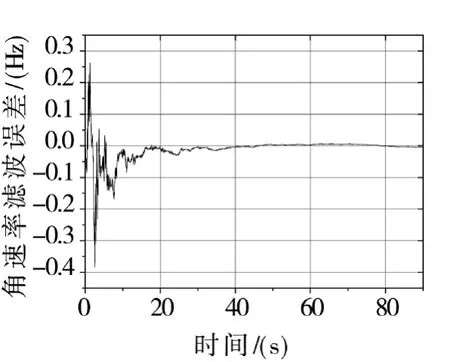
图5 20 Hz滚转角速率下角度滤波误差
从以上仿真结果可以看出,不同滚转角速率条件下,角速率滤波都能够较快地收敛,滤波精度较高,角速率平均误差在0.1 Hz以内;角度的平均误差在1°以内。以上误差在允许的范围内,仿真结果证明了方法的有效性。
4 结论
针对高速滚转弹丸滚转角测量的问题,本文提出了一种基于GPS相位差量测的角速率和角度测量方法,利用安装在弹丸上的多个天线所获相位差,建立了相位差与滚转角、滚转角速率之间的关系,采用基于相位差量测的扩展Kalman滤波算法,求取滚转角和滚转角速率。不同滚转角速率条件下的仿真实验结果证明了该方法的有效性。该方法具有一定的工程应用价值,可以直接求取滚转姿态信息,具有反应时间短、精度高的优点。