雷达多径效应抑制技术分析及展望*
2019-06-13汪安戈胡国平
汪安戈,胡国平,周 豪
(空军工程大学防空反导学院,西安 710051)
0 引言
随着现代飞机、巡航导弹等空袭兵器的性能大幅提升,利用雷达低空探测时存在的盲区进行低空、超低空突防,已成为现今争夺制空权的重要手段。但在雷达低角跟踪的过程中,雷达波束主瓣贴地,其接收回波中不但有直达信号,还存在着经地(海)面反射和散射的多径信号,这些信号通常是相干的,经接收机混叠后将严重影响雷达对低空目标的跟踪性能。所以多径效应是雷达低角跟踪问题中一个重要的影响因素,深入研究多径效应及其抑制技术对于解决低空目标的跟踪问题有着重大意义。本文从多径效应基本原理、多径效应的影响、雷达多径效应抑制技术现状及多径抑制技术未来趋势等方面进行了分析,为深入研究雷达多径效应问题提供参考。
1 多径效应基本原理
1.1 多径效应基本概念
雷达多径效应是指当雷达跟踪低仰角目标时,因为地(海)面对电磁波的反射和散射作用,目标回波会通过多条路径到达雷达接收天线,这些多径回波将在雷达接收机中矢量叠加产生干涉,使雷达接收到的信号失真,难以稳定地跟踪目标。
雷达探测中所讨论的多径效应必须满足两个特定条件,一是多径反射信号由主瓣进入,即目标仰角小于雷达波束垂直宽度的一半;二是直达信号与反射信号的路程差不大于距离分辨率。只有满足上述条件时,多径效应才对雷达低角跟踪有明显影响,因此,导致的雷达低角跟踪不稳定问题才称之为雷达多径效应问题。
1.2 多径信号模型
信号在雷达与目标间是双向传播的,多径情况下一共有4条传播路径,分别为直射-直射,直射-反射,反射-直射,反射-反射[1]。多径情况下雷达收发信号如图1所示。
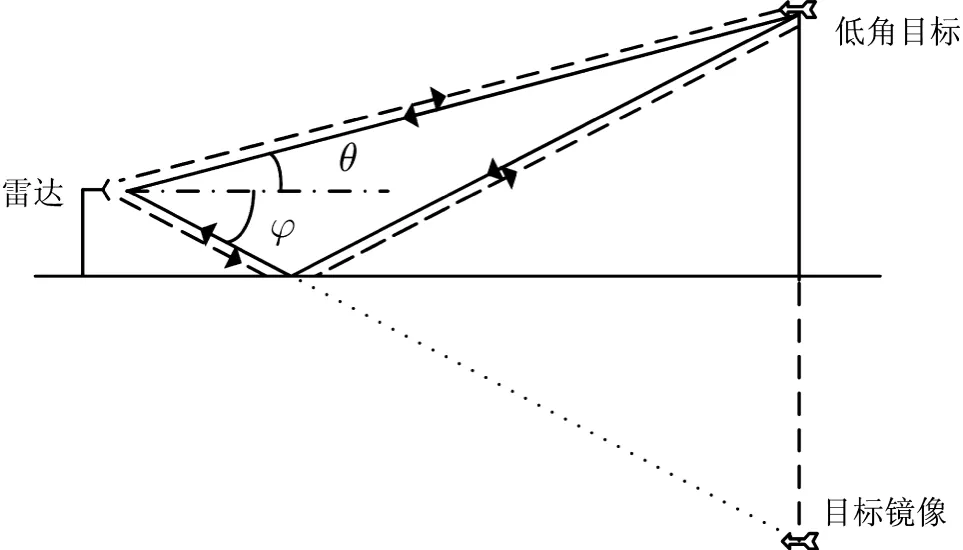
图1 雷达多径效应示意图
此时雷达的接收信号可表示为:

其中,s1(t)为直达信号;表示只经过一次地面反射的信号;表示经过两次地面反射的信号;ρ为反射系数;为路程差引入的相位差;n(t)为接收机噪声。
1.3 多径反射机理
第一菲涅尔区是反射引起的多径波程差小于半个信号波长的椭圆形区域,多径反射的能量大部分来自这一区域,因此,其反映了反射面的主要特性。假设雷达高度为3 m、6 m和10 m,信号波长为1 m,目标高度为1 350 m,且与雷达水平距离为75 km,雷达波束垂直与水平宽度均为3°,则雷达不同高度下地面上第一菲涅尔区的分布如图2所示,其中*为镜面反射点[2]。
图2 雷达不同高度的菲涅尔反射区
在进行低角跟踪的过程中,第一菲涅尔区范围很大,且反射区反射的信号中包含镜面反射和漫反射分量。当反射表面引入的相位差小于,即满足瑞利判据[3]条件时,就认为反射表面光滑,即:

其中,σh为反射面的起伏度;φ为擦地角;为信号波长。此时多径反射信号以镜面反射分量为主,其主要集中在几何反射点附近。
当不满足瑞利判据条件时,即认为反射表面粗糙,则以漫反射分量为主,其可以看作随机分布在菲涅尔区内众多小镜面反射的矢量和。一般来说,与直达信号具有强相干性的镜面反射信号对雷达检测与跟踪有较大影响;而与直达信号相干性小的漫反射信号,一般可当作噪声或杂波进行处理。
2 多径效应影响
2.1 对低空目标检测的影响
雷达低角跟踪时接收机收到的是多路径信号,它们走过的路程不同,故相互之间存在一定时延。这里假设目标对任意方向RCS恒定,接收到的直达信号为,那么雷达接收信号的幅度为:
由式(3)可得接收信号的幅度随斜距的变化曲线,如图3所示。

图3 接收信号幅度随斜距变化示意图
由图3可知,目标斜距的改变会引起ΔR的改变,从而引起接收信号幅度随的变化而变化。因此,当雷达对低空目标检测时,由于目标是运动的,的值会不断变化,所以多径叠加后接收信号的幅度也会时刻起伏,这将导致接收信号的能量起伏,严重影响雷达对低空目标的检测。
2.2 对低空目标仰角测量的影响
多径效应还会影响低空目标仰角的测量。对于单脉冲测角系统,其利用和、差信号归一化后的值,即可得到目标偏离天线轴线的角度,从而确定目标的仰角。但在多径情况下其和、差信号分别为:
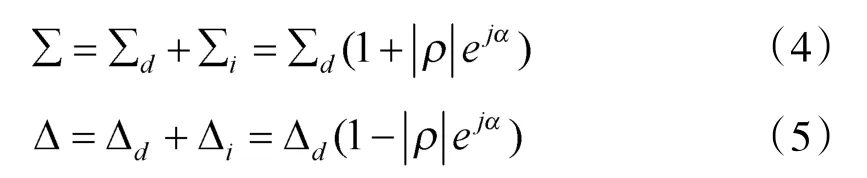
由此推导得出多径效应导致的测角误差近似计算公式为[4]:
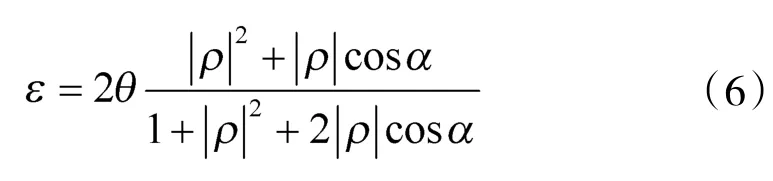
其中,ε为仰角测量误差;θ为目标仰角。随着目标的运动,θ与α的值将会不断改变,这会引起雷达仰角测量误差持续起伏变化,使跟踪波束剧烈上下摆动,难以稳定地跟踪目标。
而对于相位法测角系统,此时相邻接收天线的相位差并不是直达或反射信号中某一信号的仰角引起的,而是直达与反射信号的矢量和信号的相位差,所以相位法测角此时失效。
3 雷达多径效应抑制技术分析
从根本上说,多径效应是电磁波传播信道中的多径传输现象所引起的干涉延时效应,它会影响接收信号的幅度与相位,引起信号衰落与仰角测量误差,是制约低角跟踪性能的重要因素之一。解决多径效应问题的难点在于分辨直达信号与多径反射信号,估计反射面反射系数。而直达信号与多径反射信号路程差不大,相对时延较小,且强烈相干,难以在时域与频域上分辨。同时目标是运动的,反射面参数也随之改变,这增大了对反射系数估计的难度。针对这些难点,国内外研究人员进行了长期的研究,提出了多种多径抑制技术,现对具有代表性的多径效应抑制技术进行分析。
3.1 改进单脉冲
改进单脉冲技术是针对低角跟踪问题而提出的,其通过改进雷达天线的方向图,达到消除多径效应的目的,典型方法有双零点法和对称波束法。
双零点法通过令两套单脉冲系统中分别指向目标与镜像方向的和、差波束在相互方向形成零点,从而使直达信号与反射信号相互之间对各自仰角测量的影响减弱。针对阵列雷达体制,Sebtm通过优化权向量形成了最优和、差波束,从而实现双零点法[5]。徐振海利用极大似然估计得出了迭代的双零点算法,并通过数字波束形成实现双零点单脉冲系统修正和、差方向图[6]。双零点法可以在反射系数未知的条件下有效抑制多径效应造成的影响,但其馈源结构比常规单脉冲更复杂,且信号处理单次测量误差较大,需要多次迭代处理,计算量大。
对称波束法通过重新设计单脉冲和、差波束,使单脉冲系统的鉴角曲线关于波束指向对偶,从而消除多径反射信号对单脉冲比值的影响,其原理如下页图4所示。Sebtm在该方法的基础上通过权向量优化实现了最优和、差波束,进一步实现了固定波束法[5]。李涛护提出了一种利用相邻脉冲差波束相位跳变构造对称波束的闭环跟踪算法[7]。对称波束法同样可在反射系数未知的条件下抑制多径仰角误差,且工程实现简单,但运用时目标与镜像必须同时处在雷达的照射波束内,应用范围比较有限。
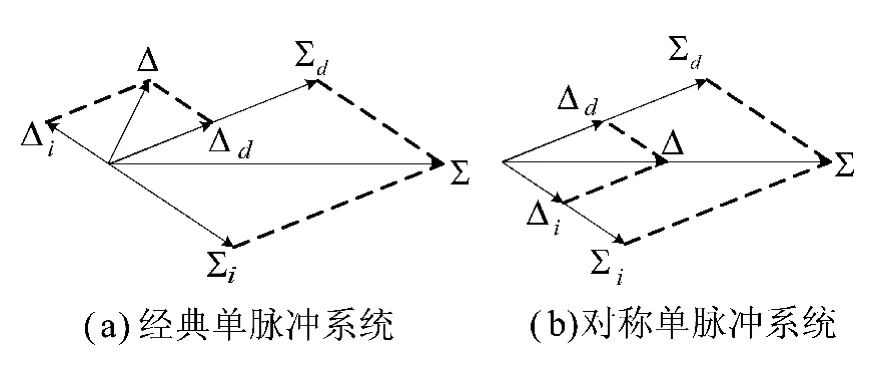
图4 对称波束法原理图
3.2 高分辨技术
高分辨技术可以一定程度上将直达信号与反射信号分离开来,是唯一能实现完全消除多径误差的方法。高分辨技术包括角度高分辨、距离高分辨和多普勒高分辨等。但实现角度高分辨的窄波束需要很高的雷达频率或大的天线孔径,实际中难以满足;而多普勒高分辨因为多普勒频差太小,需要长时间相干累积,并不实用。故下面只介绍距离高分辨。
距离高分辨利用直达信号与多径反射信号间的路程差将两者分辨开来,只跟踪直达信号。吴海研究了实现高距离分辨率的窄脉冲和超宽带技术,提出了较易实现的时间-频率码合成来达到高距离分辨的方法[8]。Smit将宽带测量和距离高分辨技术应用于分离接收信号中的直达波与海面多径反射波[9]。距离高分辨可以从根本上避免多径效应的影响,但实现起来需要很大的带宽,并且在多目标情况下会出现后续目标回波沉浸在先前目标多径回波中的现象。
3.3 超分辨测角技术
阵列超分辨技术具有较高的角分辨率和测量精度,在各种阵列雷达仰角测量中应用广泛,其重点是采用超分辨算法来解决多径环境下角度测量问题。有代表性的超分辨算法包括可用于相干源的MUSIC算法和最大似然算法(ML)。
可用于相干源的MUSIC算法是以基本MUSIC算法为基础进行改进,使之能对相干或多径信号进行仰角估计的一类算法。Pedenko运用MUSIC算法测量海面漫反射严重时低空目标的仰角[10]。Zhao提出了一种新的TS-GMUSIC算法来测量低空多径目标的高度[11]。朱伟通过将不受信源相干影响的约束MUSIC算法应用于米波雷达低角测高中,提出了一种广义约束MUSIC算法[12]。该类算法只需要做一维搜索,可以很好地估计出目标仰角,但是随着搜索精度的提高运算量会增大。
最大似然算法是通过最大似然估计原理对低空目标进行仰角估计的一类算法。吕韶昱利用最大似然估计算法,从雷达系统实时存储下来的视频信号中估计低空目标仰角[13]。余志斌提出了一种DOA和衰落系数联合估计的改进最大似然算法,其使用交替极大值技术,降低了ML算法的复杂度[14]。Bialer采用ML算法估计多径情况下目标的位置[15]。该类算法可取得比相干源MUSIC算法更高的仰角估计精度,但一般需要进行多维搜索,运算量很大。
3.4 分集技术
分集技术利用不同分集下多径接收信号幅度与相位差的不同,将各分集下的接收信号相互叠加,从而能够抑制因多径效应引起的能量起伏,可以有效针对低空目标检测问题。分集技术主要有频率分集、空间分集和极化分集。
频率分集令雷达同时发射有一定频率间隔的信号,利用不同频率回波间相关性极小且衰落概率不同的特点来抑制多径效应。Sen提出了一种基于交互信息波形重构的正交频分多路复用(OFDM)MIMO雷达低角跟踪算法[16]。袁海锋提出了一种基于OFDM-MIMO雷达体制的多径抑制方法,采用频率分集技术有效地抑制了镜面反射多径干扰[17]。频率分集能有效抑制多径衰落现象,但其成倍的额外占用了频带,降低了频谱利用率。
空间分集也称天线分集,其采用多组有一定距离的接收天线同时接收回波信号,以降低各接收信号间的相关性,抑制多径衰落。Fishler指出空间分集能够提高雷达对RCS起伏目标的检测性能[18]。周生华提出了一种基于空间分集雷达的信噪比加权信号融合检测器,在低性噪比时仍有较好的检测性能[19]。空间分集的实现简单,但当天线间距离过大时可能会存在时间不同步等问题。
极化分集采用正交双极化接收阵列分别接收水平与垂直极化多径信号,利用反射面对水平与垂直极化信号的反射效果不同达到抑制多径衰落与去相干的目的。施龙飞将极化分集运用于多径测角中,有效降低了多径误差[20]。Na Li分析了极化分集MIMO雷达对目标检测的性能[21]。极化分集仅需较少的快拍数就可给出估计结果,但因为采用了正交双极化接收阵列,系统通道比普通标量阵列增加了一倍,信号处理负担更重。
3.5 盲信号分离技术
盲信号分离技术能够在无任何先验知识的情况下,仅通过雷达测量到的多径接收信号即可提取或复原出目标信号,其重点是对于观测信号分离矩阵的求解。Cheng提出了一种基于全局最优盲源分离的直达波提纯算法[22]。房少娟等运用盲信号分离技术提升了雷达低角跟踪性能[23]。张瑜针对多径杂波干扰问题,提出了一种基于全局最优的盲源分离算法来抑制干扰,实现了对直达波的分离[24]。盲信号分离技术可以有效抑制多径误差,且不依赖于多径信号模型,适用性好,但是当目标与反射信号数目多于传感器数目时,盲分离会出现欠定的情况。
4 雷达多径效应抑制研究展望
针对多径效应抑制问题,现有技术虽针对特定的条件、一定的范围、选定的对象取得了较好的效果,但未充分考虑漫反射条件多径效应抑制,多目标多径效应抑制等问题,结合雷达体制解决多径效应问题的研究还存在不足。
4.1 漫反射条件下多径效应抑制
现实中多径反射信号一定存在着漫反射分量,纯镜面反射的情况是不存在的,但多数多径抑制方法都是基于镜面反射模型而产生,这将导致当漫反射分量不可忽略时,基于纯镜面反射模型的各种方法估计误差增大甚至失效。在研究漫反射多径时,应当从反射面的漫反射机理出发,给出漫反射计算公式,建立镜面反射和漫反射复合的多径效应模型,从而充分考虑镜面反射与漫反射对多径效应的影响,并在此基础上研究多径抑制技术,以实现在漫反射严重的情况下雷达仍能精确跟踪低空目标。
4.2 多目标条件下多径效应抑制
低空突防时飞机、巡航导弹等空袭兵器往往共同参与进攻,同一低空区域中将存在多个目标,但现今的多径抑制方法多是依靠单目标模型建立,对于两个或多个目标的情况考虑较少,这样会导致一些多径抑制方法在多目标情况下失效。要研究多目标条件下的多径抑制,首先需要建立多目标的多径信号模型,分析雷达低角跟踪在多目标情况下会遇到的困难,再根据问题结合现有的多目标识别技术与多径抑制方法,以得到多目标情况下能有效探测各个低空目标多径抑制方法。
4.3 基于MIMO雷达的多径抑制
MIMO雷达[25-26]又称多输入多输出阵列雷达,因各个阵元发射相互正交的信号,有着波形分集的能力,同时还可以实现空间分集与频率分集,较传统的阵列雷达有着更好的信号检测能力与角度分辨能力。将多径抑制技术与MIMO雷达的结合,首先需要建立基于MIMO雷达的多径信号模型,再根据模型结合多径抑制技术提出新的基于MIMO雷达的多径抑制方法。由此得到的方法可以做到比一般的多径抑制技术取得更好的检测与角度估计能力,因此,将多径抑制技术与MIMO雷达体制相结合可以更有效地抑制多径效应,有着更广阔的前景。
5 结论
本文在多径效应基本原理的基础上,研究多径效应的影响,分析了有代表性的雷达多径效应抑制技术,给出了多径抑制技术未来的研究方向,为深入研究雷达多径效应问题提供参考。由于现今还没有一种实用的多径信号模型以及能很好解决多径效应的方法,今后的研究应着重结合实际建立贴近现实情况的多径效应模型,并在此基础上提出有效抑制多径效应的方法。