基于任务流的网络化指挥信息系统抗毁性分析*
2019-06-13冉淏丹李建华南明莉
冉淏丹,李建华,崔 琼,南明莉,3
(1.空军工程大学信息与导航学院,西安 710077;2.国防科技大学信息通信学院,西安 710106;3.解放军95801部队,北京 100095)
0 引言
网络化指挥信息系统是体系作战的核心支撑,在实时化情报获取、一体化指挥控制和精确化火力打击等方面发挥不可或缺的作用。在复杂战场环境中,指挥信息系统面临物理打击和网络攻击双重威胁,必须具备一定的抗毁性才能保障使命任务的顺利完成。因此,研究指挥信息系统结构抗毁性在提升体系作战效能具有重要意义。
网络化指挥信息系统结构抗毁性研究,在一定意义上属于复杂网络结构抗毁性研究的范畴,国内外学者就复杂网络抗毁性展开了一系列研究。Jeong等从结构角度对随机网络和无标度网络的抗毁性进行了研究[1];吴俊提出不完全信息条件下的复杂网络抗毁性,通过建模、分析、优化和应用,对复杂网络抗毁性进行了系统研究[2];胡焰智等通过优化网络拓扑的思想研究了无标度网络的抗毁性[3];彭兴钊等重点研究了无标度网络在节点发生故障情况下,网络的级联抗毁性[4]。在研究复杂网络抗毁性的基础上,Grant等将指控系统网络抽象成一种无尺度网络,通过移除节点验证了网络抗毁性与节点关键性有关[5];任清辉等从攻击目标选择策略的角度,通过确定物理节点攻击概率确定节点重要性[6];王欣等从服务能力的角度,通过研究网络拓扑结构与节点间的服务关系,对系统抗毁性进行分析[7];易侃等从攻击模式的角度,对不完全信息攻击下的系统抗毁性进行分析[8-10]。上述文献侧重对网络及网络系统的物理网络拓扑结构展开抗毁性研究,对系统结构功能抗毁性研究较少。网络化指挥信息系统虽具备复杂网络特性,但因其军事任务的独特性和作战节点的功能性[11],其抗毁性研究重点应不止于物理网络拓扑结构本身的抗毁性,还应结合具体使命任务考虑其功能抗毁性。本文将指挥信息系统抗毁性定义为:指挥信息系统在遭受外界软硬攻击,或内部要素故障失效的情况下,能够完成作战任务的能力。在此基础上提出基于任务流的网络化指挥信息系统结构模型,引入系统结构抗毁度对抗毁性进行定量分析,找出在任务流驱动下的动态网络中影响功能实现的关键节点,以期为增强指挥信息系统抗毁性提供有益参考。
1 指挥信息系统双层网络结构
网络化指挥信息系统是依托通信基础网,由情报系统、指控系统和武器系统等军事信息系统共同构建的复杂军事信息系统。广义上讲,指挥信息系统由指挥信息系统各组成要素及要素之间的相互关系构成[12]。从任务功能角度分析,指挥信息系统基于通信基础网络形成物理通信连接结构,各作战要素根据作战任务目标产生信息交互连接关系,形成功能连接拓扑,集物理网络和功能网络于一体,是承载多业务系统的层级复杂系统。由于单层网络结构无法全面准确描述层级复杂系统,对研究系统功能特性也存在一定局限性,因此,本文将指挥信息系统结构定义为由物理网络层和功能网络层构成的双层耦合网络结构,如图1所示。

图1 指挥信息系统双层网络结构
其中,物理网络由物理节点(作战单元)和通信链路构成,每个物理节点代表一个具体的作战单元,并且具有一种或多种功能(例如电子侦察机具有情报侦察功能、预警机具有指控和情报功能)。功能网络由功能节点和节点间的信息连接关系构成,每个功能节点只具备单一功能。物理节点和功能节点之间为“一对一”或“一对多”的映射关系(如电子侦察机映射为情报节点、预警机映射为指控节点和情报节点)。
上述分析可知,指挥信息系统网络结构是一个由物理网络和功能网络耦合而成的双层网络结构,物理网络是指挥信息系统功能实现的载体,对功能网络形成约束;不同作战任务需求引起功能节点间的信息供需关系发生变化,形成不同的信息交互关系。因此,在物理连接不发生改变的情况下,功能网络随作战任务的变化呈现出不同的拓扑结构。
2 基于任务流的系统结构建模
2.1 作战任务流模型
作战行动围绕特定作战目标展开,由一系列作战任务构成,按照一定的逻辑/时间关系形成作战任务流,指挥信息系统按照作战任务流,进行所有信息活动。
指挥信息系统为实现作战任务目标OT,将OT分解为若干任务,组成作战任务集,即。作战过程中,指挥信息系统按照一定的时间/逻辑顺序执行T,因此,作战任务流可以用二元组表示,其中RT-T表示不同作战任务间的时序/逻辑关系,即指挥信息系统实现作战目标过程中的任务流动关系;

2.2 基于任务流的功能网络结构建模
任务流驱动功能节点之间的信息供需关系发生变化,改变信息流转,从而使功能网络拓扑随作战任务流的变化呈现动态时效性。
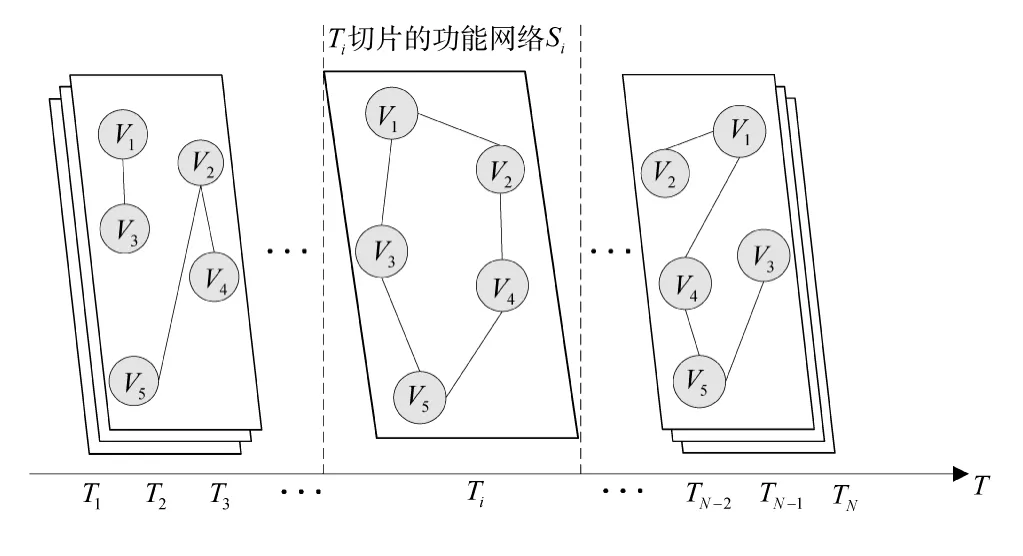
图2 基于任务流的功能网络结构示意图
功能网络Si可以看成是由一系列任务不重叠且按照任务流前后连续的邻接矩阵,其中aij表示逻辑/时序第n个任务时,节点i和节点j的信息连接关系:

2.3 基于任务流的多子网系统结构建模
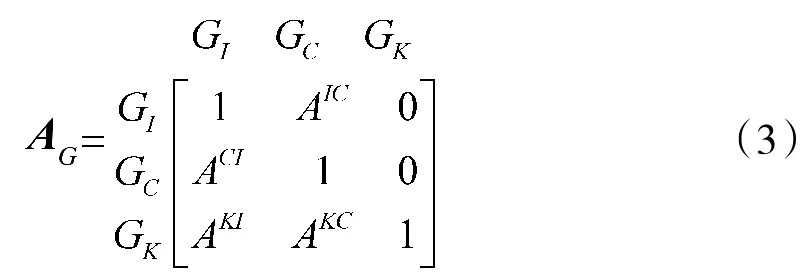
基于任务流的网络化指挥信息系统结构,其上层功能网络是由多个功能子网构成的复合网络,即由功能节点和信息连边构成的具有多个交互子网的超网络。本文将功能网络分为3类子网:态势感知网GI、指挥控制网GC和火力打击网GK,从而得到指挥信息系统功能网络模型,其中表示功能子网间的4种信息依赖关系。
如图3所示,作战节点根据其业务功能,可分为3类节点:情报节点VI、指控节点VC和火力节点Vk。功能网络中传输的信息分为同类节点之间的协同信息EA,VC向其他节点发送的指控信息EC,以及VI向其他节点发送的情报信息EI。VC向VI发送EC,形成GI对GC的依赖关系,用邻接矩阵表示;VI向 VC提供 EI,形成 GC对 GI的依赖关系,用邻接矩阵表示;VC对Vk发出EC,形成GK对GC的依赖关系是GK对GC的依赖,用邻接矩阵表示;VI向Vk传送 EI,形成火力打击网对 GI的依赖关系,用邻接矩阵表示。指挥信息系统功能网络模型用矩阵AG表示为:

图3 指挥信息系统三类功能子网信息连接图
3 基于任务流的系统结构抗毁性分析
在双层耦合的网络化指挥信息系统结构中,上层功能网络承载态势感知、指挥决策、火力打击等业务,下层物理网络对其起支撑作用。因此,指挥信息系统结构抗毁可分为物理网络抗毁和功能网络抗毁,两者之间通过映射关系相互影响。基于任务流的指挥信息系统抗毁性是在研究物理网络抗毁性的基础上,对随任务变化的功能网络拓扑结构进行抗毁性研究。基于任务流的功能网络拓扑随任务不断变化,当实体节点遭受打击故障时,可能会导致功能网络节点失效,引发网络扰动,降低网络效率,进而影响功能网络能力。因此,本文将采用网络效率指标来衡量网络能力的变化情况,借鉴“破坏性等价于重要性”的系统科学思想,在动态变化的功能网络拓扑中识别关键节点,对基于任务流的指挥信息系统结构的功能抗毁性进行分析。
3.1 功能网络分析
指挥信息系统在执行不同的任务时,功能网络的拓扑呈现出不同结构。图3所示为3个任务阶段,指挥信息系统物理网络拓扑映射3种不同功能网络拓扑的情况。
如下页图4所示,针对同一物理网络,在完成3项不同任务时,指挥信息系统所呈现出不同的功能网络拓扑结构,因此,应综合多任务条件下的功能网络拓扑,对功能网络进行抗毁性分析。

图4 3个任务阶段物理拓扑和功能拓扑映射图
3.2 改进的网络效率指标
基于任务流的功能网络效率如式(4)所示:

其中,N是网络中节点个数,定义di,j(T)为节点Vi到节点Vj的最短信息连边距离,为节点Vi到节点Vj的网络效率。在功能网络中εij(T)随任务T而变。在式(4)的基础上,将态势感知网、指挥控制网和火力打击网3个功能子网的网络效率分别用表示。

3.3 抗毁性分析
指挥信息系统在执行任务过程中,功能节点遭受攻击会使功能网络受损,影响网络连通能力。系统抗毁度用于描述系统受损后,其结构保持联通的能力,是量化指挥信息系统抗毁程度的重要指标。

其中,INV(A)为指挥信息系统对攻击A的抗毁度,E表示指挥信息系统功能网络的效率,EA表示系统在受到攻击A时功能网络的效率。
4 仿真分析
以某区域联合防空指挥信息系统抗毁性为例,进行仿真分析。
4.1 想定设置
假设该区域联合防空力量包括:1个联合指挥中心,1个战术指挥中心,1个雷达指挥中心控制5个雷达单元,2个高炮指挥控制中心,4个高炮单元,2辆导弹指挥车控制4个导弹发射单元,1个情报处理中心,1架预警机,2架电子干扰机和3架歼击机,共29个物理节点,包含41条通信链路,其中预警机和歼击机主机为复合节点。上层功能网络中有 31 个节点,其中 V1~V9为情报节点,V10~V18为指控节点,V19~V31为火力节点。该指挥信息系统结构如图5所示。
根据区域联合防空的作战目标,其主要任务包括:情报侦察T1、电子攻击T2、空中突击T3、防空反导 T4等。T1阶段,指控节点对侦察节点(V1~V9)发送情报侦察指令,情报节点收集情报信息,经情报处理中心V11汇总处理后上报联合指挥中心V10和战术指挥中心V12;T2阶段,指控节点在情报支持下,对电子干扰机(V27V28)下达对敌电子攻击指令,对敌空中力量进行电子干扰;T3阶段,指控节点结合空中态势信息,对歼击机(V29V30V31)下达空中突击指令,对敌实施空中火力打击;T4阶段,战术指挥中心V12综合空地态势,通过高炮指控中心(V15V16)和导弹指挥车(V13V14)下达火力打击指令,实施防空反导作战行动。
根据任务之间的时序/逻辑关系,得到区域联合防空作战任务流,如图6所示。
区域联合防空作战任务流驱动其指挥信息系统上层功能网络拓扑结构动态演化,根据,构建功能网络拓扑,如图7所示。
4.2 仿真分析
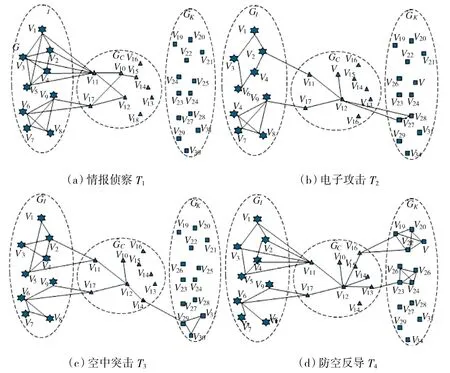
图7 指挥信息系统功能网络拓扑演化图
为简化分析,将指挥信息系统功能网络抽象为无向加权图,连边权值均设为1。本文采用MATLAB仿真软件分别对执行4项不同任务时(拓扑如图7所示),分别对指挥信息系统单个功能子网抗毁性与功能网络整体抗毁性进行分析,记录节点损毁后网络抗毁度的变化情况,绘制抗毁度变化曲线,通过节点毁伤后系统抗毁度的变化情况,并结合图7,对仿真结果进行分析。
4.2.1 功能子网抗毁性分析
若不考虑态势感知网、指挥控制网和火力打击网之间的信息关联关系,可分别得到3个功能子网中节点对子网抗毁度的影响,确定节点在功能子网中的重要性,从而通过关键节点防护和调整子网内部的信息连接关系等方法,增强功能子网内部的结构抗毁性。
如图8所示,图中横坐标为毁伤节点编号,其中横坐标编号1~9表示情报节点V1~V9,属于态势感知网中的功能节点;横坐标编号10~18表示指控节点V10~V18,属于指挥控制网中的功能节点;横坐标编号19~31表示火力节点V19~V31,属于火力打击网中的功能节点。纵坐标表示功能子网结构的抗毁度。结合图7中的拓扑结构,功能子网结构的抗毁度由式(5)~式(8)计算得到。
图8 功能子网独立抗毁度
由图8中可以看出:当情报节点V6损毁时,T3和T4阶段态势感知网的抗毁度明显下降,结合图7(c)和图7(d),两任务阶段V6在态势感知网中除完成自身情报获取的同时,还对V7V8进行信息中转,其损毁严重影响态势感知网的功能实现;T1阶段联合指挥中心V10担负整体决策功能,在指挥控制网络中连接多个指控节点,当V10损毁时,T1阶段指挥控制网络的抗毁度明显下降;当指控节点(战术指挥中心)V12损毁时,所有任务阶段指挥控制网的抗毁度都下降,且除情报侦察T1外,其他3个任务阶段指挥控制网的抗毁度降为0,此时该功能子网已瘫痪,丧失任务执行能力;在火力打击网中,火力节点V19~V26只参与T4,其损毁仅对该任务阶段火力打击网抗毁度造成影响;火力节点V29V30V31只参与T3,损毁后火力打击网抗毁度仅在T3任务阶段明显降低。以上分析说明不同任务阶段,功能子网结构的变化使得同一功能节点对子网抗毁度的贡献不同,节点在子网中的重要程度随子网结构的变化发生改变。
4.2.2 整体抗毁性分析
由于态势感知网,指挥控制网和火力打击网之间存在信息依赖关系,构成指挥信息系统功能网络拓扑,因此,在作战目标达成的过程中,应考虑依赖关系对系统结构的影响,综合分析功能网络整体抗毁性。
图9中横坐标为毁伤节点编号,与图8横坐标含义相同,纵坐标为功能网络整体抗毁度。结合图7,通过式(4)、式(8)计算可得功能网络整体抗毁度。
图9 功能网络整体抗毁度
由图9可以看出:功能网络整体抗毁度曲线在指控节点V10~V18处的变化幅度最大,其后依次为情报节点、火力节点。说明指控节点损毁对整体功能网络抗毁度影响最为显著,在作战中重要性整体较高。进一步分析可知,4条功能网络整体抗毁度曲线变化最明显的点出现在V11V12处:T1阶段,情报处理中心V11所有情报节点与之建立直接连接,承担所有情报进行分析处理工作,以及对指控节点上报情报态势的重要使命,其重要性尤为突出;T2~T4阶段,战术指挥中心V12对其他指控该节点下达作战指令,对参与战斗的各情报节点和火力节点进行指挥控制,该节点损毁会对任务的完成产生严重影响。4条功能网络整体抗毁度曲线在火力节点V19~V26处表现不明显,说明火力节点在系统中与其他节点的信息交互较少,具有较强的独立性。
通过上述分析可知,在不同任务阶段,能够动态跟踪并锁定关键节点位置,针对性地根据任务需要,合理分配资源以及对重要节点加强防护,提升指挥信息系统抗毁性。
5 结论
本文采用基于任务流的系统结构分析思路,建立了指挥信息系统双层网络结构模型,针对上层功能网络的拓扑动态性,提出了系统结构抗毁性分析方法,并结合功能子网抗毁度及功能网络整体抗毁度对节点的重要性进行了分析,为指挥信息系统关键节点识别及抗毁性研究提供了有益参考。下一步将针对网络化指挥信息系统抗毁性度量问题进行研究。