基于扰动观测器的压缩式制冷系统改进Smith预估解耦控制
2019-06-05李冬辉
李冬辉,高 峰
(天津大学 电气自动化与信息工程学院,天津 300072)
由于工业化的深入发展,大量能源被日积月累地消耗,导致全球范围的能源危机逐渐加深.制冷系统的出现为人们带来了舒适的工作和生活环境,但其耗电量也在迅速增加.制冷系统产生的能源消耗约占全球总建筑能耗的40%[1],选取合适的控制方法对减小制冷系统能源损耗具有重要意义.
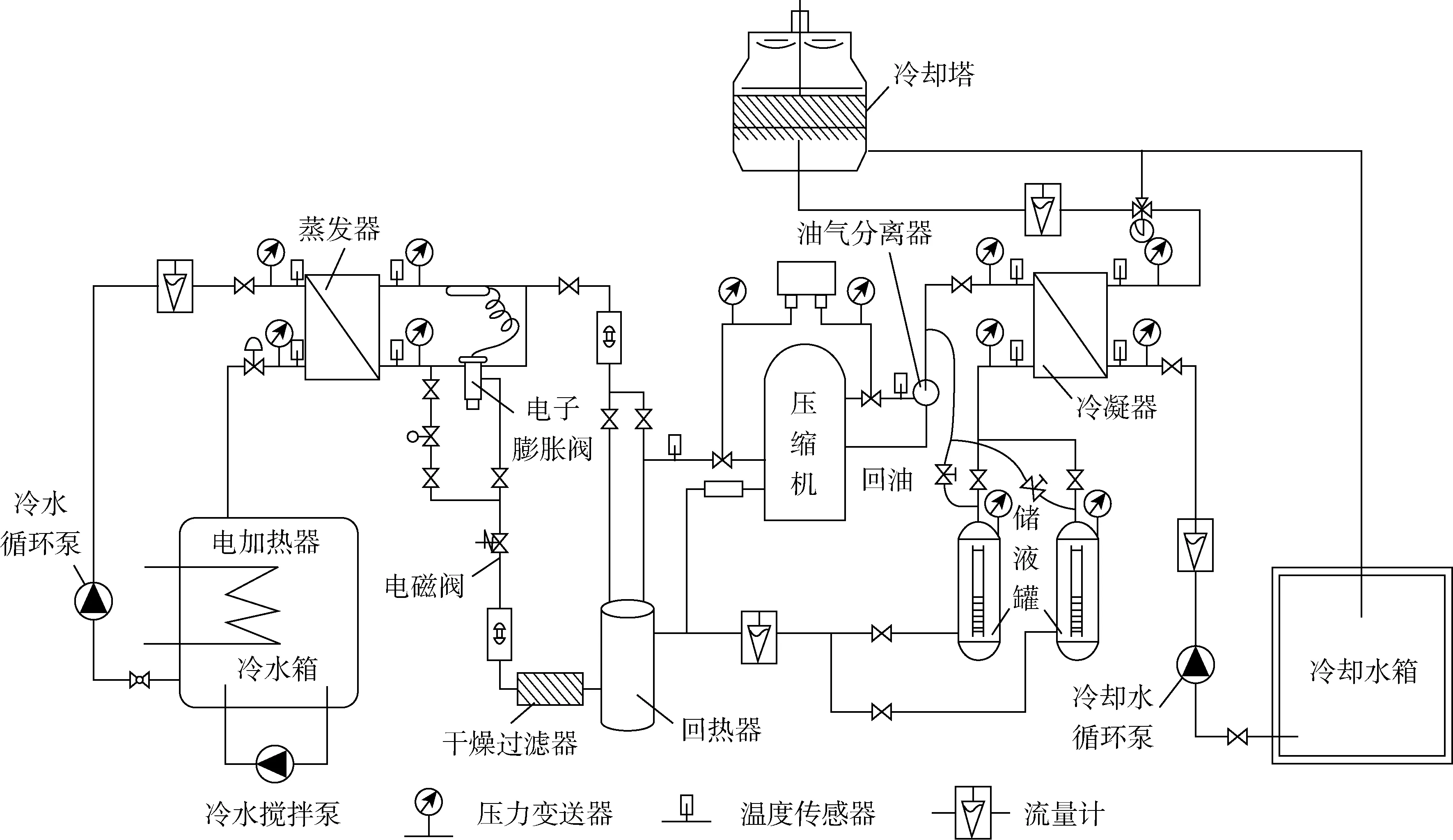
图1 压缩式制冷系统实验装置Fig.1 Experimental device of compression refrigeration system
当前,有关制冷系统的控制算法研究主要集中在控制压缩机频率和蒸发器过热度上[2].Chen等[3]通过实验证明改善过热度可以有效减小制冷系统能耗,并且提高其工作性能.传统的工业控制中,PID反馈控制算法由于其结构的简单性而被广泛应用于制冷系统领域[4].该方法可以维持制冷系统的基本运行,但冷机的过热度会产生震荡,在减缓其使用寿命的同时,也降低了制冷效率.Ping[5]将传统PID算法改进后应用于制冷系统,减小了蒸发器过热度响应时的超调,但过热度震荡的影响仍然存在.Schurt等[6]采用基于Kalman滤波器的状态观测器构造了制冷系统线性二次高斯(LQG)控制器,不仅有效解决了过热度震荡问题,而且提升了冷机的响应速度,但由于制冷系统的时变性,其所建立的非线性模型在实际应用中可能存在失配现象,导致该方案失效.薛洪武等[7]设计了改进的自抗扰控制器,在解耦的基础上实现了制冷系统过热度和蒸发温度的独立控制,但其控制过程计算量过大,控制器复杂度过高,增加了工程实现难度.Yin等[8]采用模型预测控制,实时地跟踪蒸发压力变化及蒸发器过热度设定值,有效地提高了制冷系统的能效比(COP),降低了能源消耗.
Smith预估控制可以有效地对系统时滞进行补偿,但对过程模型的精确性要求较高且鲁棒性差[9],应用范围局限.本文针对压缩式制冷系统运行时具有大时滞、强耦合、强干扰和时变等特性,提出一种基于扰动观测器(DOB)的改进Smith预估解耦控制方案.即:将外部干扰、模型不确定性等作为系统总的扰动,通过DOB进行估计;采用一阶Pade近似过程模型中的时滞环节,进而通过对角矩阵解耦的方式将压缩式制冷系统解耦为2个独立的控制回路;系统控制器参数的整定根据ITAE最小评价准则来完成.通过仿真试验与常规Smith预估控制对比,验证了所提改进方法对系统的解耦效果更好,且增强了系统的鲁棒性及抗扰性,减小了系统能耗.
1 压缩式制冷系统数学模型
压缩式制冷系统实时工况复杂,为深入研究其运行特性,实验室搭建了图1所示的实验操作平台,主要设备有:活塞式变频压缩机、风冷式冷凝器、电子膨胀阀、蒸发器和水箱等.
目前,由于机理建模得到的压缩式制冷系统数学模型阶数较高,导致常规控制算法的设计难度加大,为便于控制器设计,本文选择系统的辨识模型作为控制对象.通过大量实验测试,根据相关实验数据分析和总结影响制冷系统的各个因素,得出蒸发器过热度值、蒸发温度值与制冷系统电子膨胀阀开度、活塞式变频压缩机频率等密切相关.实验中选取制冷系统电子膨胀阀开度va和压缩机频率f为输入量,选取蒸发器过热度Ts和蒸发温度Te为输出量.被控过程传递函数矩阵为G(s),则压缩式制冷系统工作特性可描述为
(1)
(2)
式中:Δ表示各输入输出变量的变化量.
获取实验平台的实时运行数据,基于最小二乘法ARX模型辨识原理,将所测数据输入到MATLAB系统辨识工具箱中,以系统辨识的方式获取压缩式制冷系统数学模型.文献[10]中验证了该辨识模型的准确性.所得压缩式制冷系统双输入双输出传递函数矩阵为
(3)
2 基于DOB的改进Smith预估解耦控制结构
常规Smith预估控制结构如图2所示.图中:R和Y分别为系统输入和输出变量;C(s)为控制器;Gp(s)e-τs和Gm(s)e-τms分别为实际过程模型及其标称模型,τ为滞后时间;e为输入输出之间的误差.在标称情况下:Gp(s)=Gm(s)、τ=τm,此时图2可简化为图3所示等效结构,图中u为控制器输出.由图3可以看出,系统经Smith预估补偿后,时滞环节被置于闭环之外,去除了其对系统稳定性的影响.
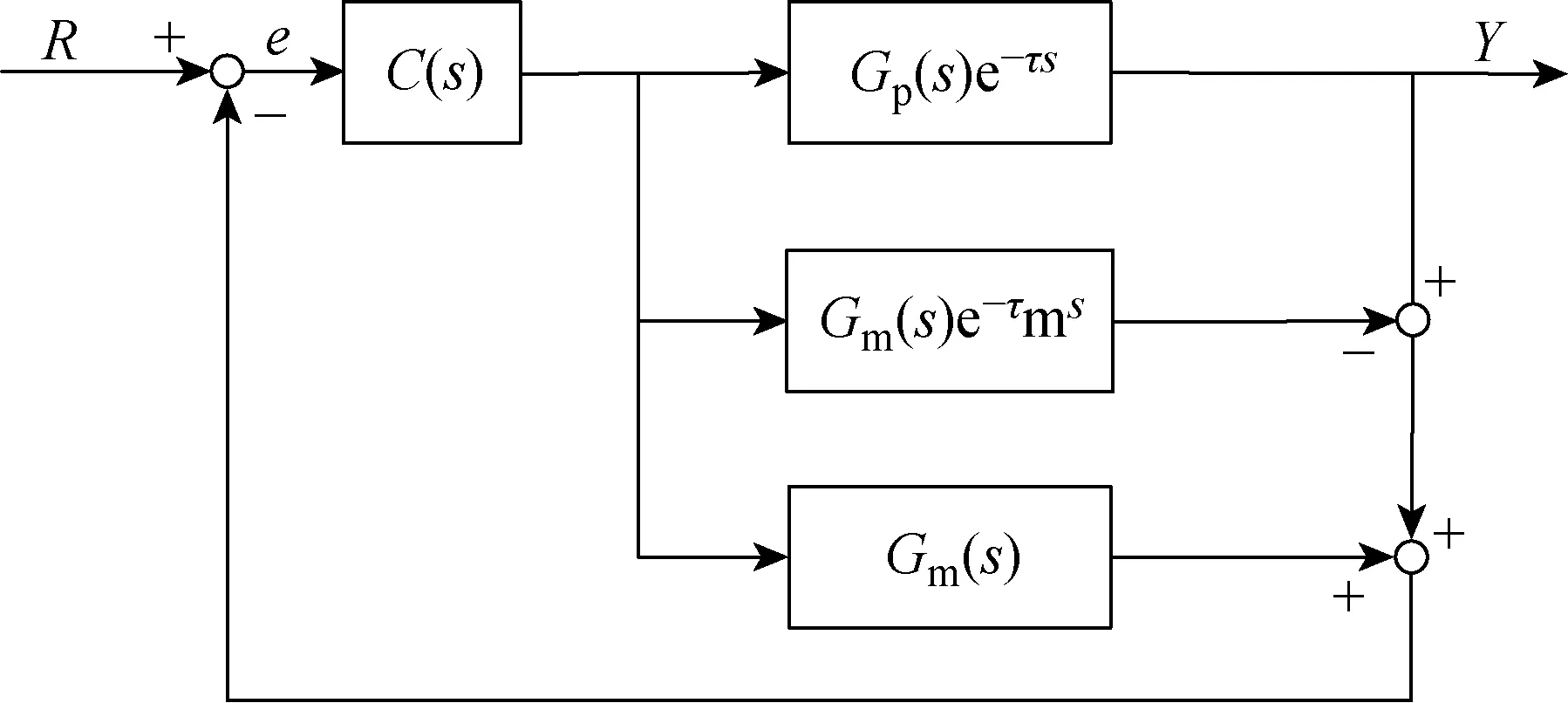
图2 常规Smith控制结构Fig.2 Conventional smith control structure

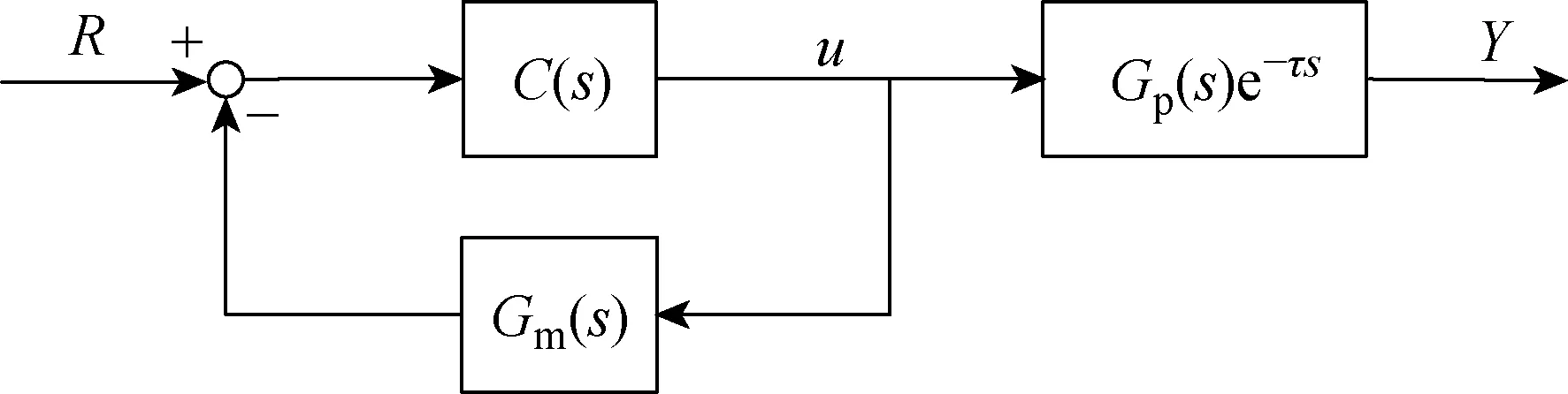
图3 等效结构Fig.3 Equivalent structure
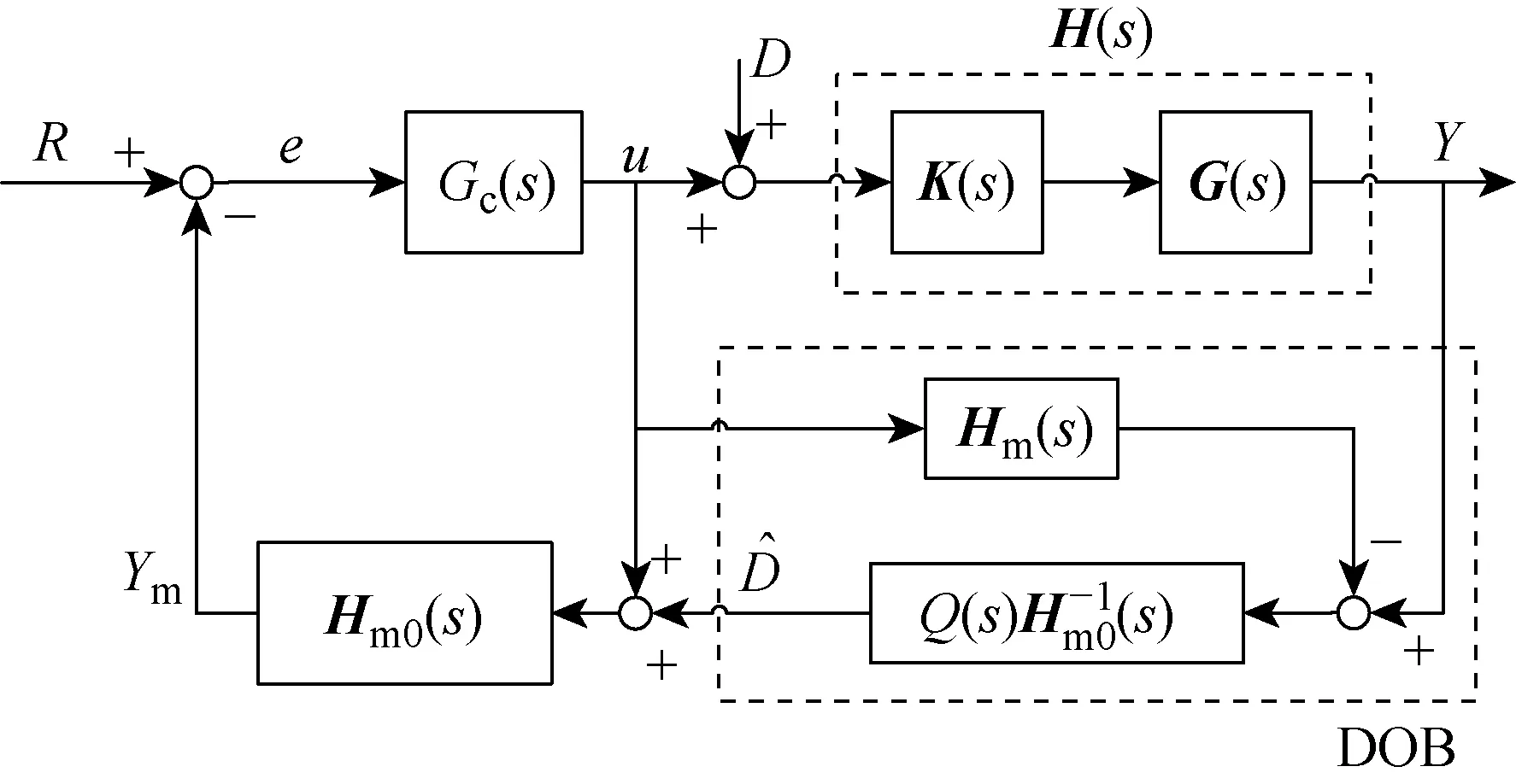
图4 改进型D-Smith预估解耦控制结构Fig.4 Modified D-Smith predictive decoupling control structure
(4)
式中:λ和n分别为滤波器时间常数和阶次.
由图4可知,系统的输出可表示为
Y=
(5)
标称情况下,式(5)可简化为
(6)
由式(6)可以看出,无论是对于设定值输入R还是外部干扰D,控制系统闭环内均不含纯滞后部分,符合Smith预估控制的基本思想.
2.1 解耦器设计
压缩式制冷系统为耦合系统,为消除因系统内部耦合而产生的不利影响,本文采用对角矩阵的方法进行解耦.由于对角矩阵解耦目的是将压缩式制冷系统实际过程传递函数矩阵G(s)转变成对角形式,结合式(3),由图4可知,通过串联解耦矩阵K(s),压缩式制冷系统实际被控过程传递函数形式为
H(s)=G(s)K(s)=
(7)
由式(7)可以看出,解耦后的压缩式制冷系统,由一个双输入双输出系统转化成2个独立的单输入单输出控制回路,即电子膨胀阀开度控制过热度回路和压缩机频率控制蒸发温度回路.
由式(3)可知:det(G(s))≠0,故系统被控过程G(s)是稳定非奇异矩阵,G(s)存在逆矩阵G-1(s).将式(7)两边同时左乘G-1(s),得解耦器矩阵
(8)
采用一阶Pade近似[11],将时滞环节e-τs线性化处理,即:e-τs≈(1-0.5τs)/(1+0.5τs),近似误差当作扰动处理,并将其代入式(8)中,计算可得
K11(s)=
K12(s)=
K21(s)=
K22(s)=
2.2 控制器设计
图4中Gc(s)采用传统PI控制器,其形式为
Gc(s)=Kp[1+1/(Tis)]
(9)
式中:Kp和Ti分别为控制器增益和积分时间.
从式(7)中可以看出,经解耦的压缩式制冷系统各回路被控对象均为一阶惯性时滞(FOLPD)形式,即
(10)
式中:kmi、Tmi和τmi分别为各回路被控对象的增益、惯性时间常数和滞后时间常数(i=1,2分别表示过热度回路和蒸发温度回路).
将式(9)和(10)代入式(6)中,忽略外扰影响,则各回路的闭环特征方程为
(11)
本文PI控制器参数采用ITAE最小评价准则[12]实现整定,文献[12]中给出了在ITAE准则下的二阶最佳极点配置方程
(12)
式中:ωn为控制系统无阻尼自然振荡频率,其值在工程中是根据所要求的闭环响应的过渡过程时间tr,有
(13)
联立式(11)和(12),求得PI控制器参数整定公式为
3 鲁棒性分析
根据鲁棒控制理论[13-14],在标称情况下考虑式(6),可得图4所示的控制系统最优灵敏度函数为
(16)
最优补灵敏度函数为
(17)
由式(16)和(17)可知,滤波器时间常数λ的取值影响着系统的鲁棒性和抗扰性:减小λ,则Q(s)增大、S减小、T增大,表明此时系统的干扰抑制能力增强,系统响应时间变快,动态性能增强,但鲁棒性减弱;相反,增大λ,系统鲁棒性变强,干扰抑制能力减弱,系统响应时间变慢,动态性能变弱.因此,滤波器时间常数λ的选择,应综合考虑系统的鲁棒性及干扰抑制特性.
设模型的未知摄动Δ(s)∈H∞,根据鲁棒稳定判据[13]可知系统具有鲁棒稳定性的充分条件为
(18)
令w=Gc(s)H(s)/(1+Gc(s)Hm0(s)),结合式(17)和(18),可得
(19)
可见,在标称情况下,即H(s)=Hm(s)时,Δ(s)=0,图4所示的系统给定值响应特性与常规Smith预估控制系统给定值响应特性一致,系统在PI控制器的作用下具有良好的给定值响应特性.Q(s)的存在并不影响系统的给定值响应特性,而外部扰动对系统的影响则会受到Q(s)的作用.
当被控对象发生参数摄动,即H(s)≠Hm(s)时,Δ(s)≠0,在PI控制器参数整定完成以后,只要估计出Δ(s)的上限值,通过选择滤波器Q(s)的时间常数λ,便可使式(19)成立.综上,Q(s)的存在,减小了模型不确定性给系统带来的负面作用,增强了系统鲁棒性,且使系统具有良好的扰动抑制特性.
4 仿真结果对比分析
为了验证本文改进方法(D-Smith)的有效性及其性能的优越性,将其与常规Smith预估控制进行仿真实验对比.通过大量仿真实践最终确定系统闭环响应的过渡过程时间tr=5、滤波器时间常数λ=6、滤波器阶数n=1;则根据式(7)所示被控对象数学模型并结合式(13)~(15),计算可知2个回路的PI控制器参数分别为:① 电子膨胀阀开度控制过热度回路Kp=-72.3,Ti=1.2;② 压缩机频率控制蒸发温度回路Kp=-85.7,Ti=1.2.
4.1 解耦性验证
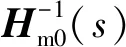
将压缩式制冷系统的过热度、蒸发温度初始值分别设定为7和5 ℃,当仿真时间为10和750 s时分别给2个控制回路施加单位阶跃信号,验证本文方法的解耦效果.仿真结果如图5所示.
图5 标称情况下响应曲线解耦性对比Fig.5 Decoupling comparison of response curves under nominal conditions
由图5可以看出,改进的D-Smith解耦控制能够以较小的初始控制量实现对给定值的精确跟踪,而常规Smith预估控制的初始控制量超调较大;且当10和750 s时,常规Smith预估控制中过热度及蒸发温度按给定值阶跃变化时2个回路中分别产生了 0.3 ℃的蒸发温度震荡和 0.7 ℃的过热度震荡,解耦效果欠佳;相比之下在改进的D-Smith解耦控制中蒸发温度及过热度的震荡则分别为 0.16 和 0.3 ℃,超调减小更为明显,验证了本文改进方法的解耦性更强.
4.2 抗扰性验证
为模拟压缩式制冷系统存在外部扰动时的运行状况,在仿真时间 1 800 s时同时对2个回路施加幅值0.2的反向阶跃输出干扰信号,验证本文方法下系统的抗扰性.仿真结果如图6所示.由图可以看出,在 1 800 s 系统存在外部扰动时,相比于常规Smith预估控制,D-Smith对外界扰动的抑制效果明显,系统受扰后的恢复速度更快,表明其具有更强的抗扰性.
4.3 鲁棒性验证
考虑到压缩式制冷系统受负荷变化等因素的影响,以及被控对象模型与实际工作的系统不完全匹配等问题,其运行时实际参数会有较大摄动,故保证制冷系统的鲁棒性是使其稳定运行的关键.为验证D-Smith鲁棒性的优势,分别将系统的增益、惯性时间、时滞时间同时增大20%,此时的系统输出阶跃响应如图7所示.
对比图7与图6可知:当系统发生参数摄动时,与标称情况下系统响应曲线相比,D-Smith相对于常规Smith预估控制,在系统运行的各个时间段的超调变化更小,能够更好地保证系统解耦效果,且对外界干扰的抑制能力更强,系统具有更强的鲁棒性.
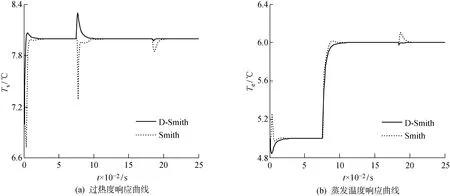
图6 标称情况下响应曲线抗扰性对比Fig.6 Immunity comparison of response curves under nominal conditions
图7 参数摄动下响应曲线对比Fig.7 Comparison of response curves under parameter perturbation
4.4 节能效果验证
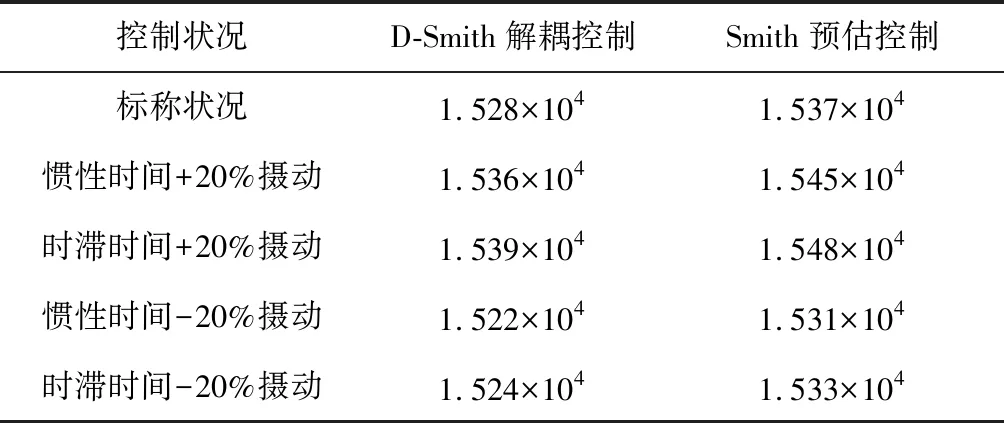
由表1可知,D-Smith相比于常规Smith预估控制,对系统的能耗更少,能耗减少约为 0.6%,且其节能效果基本不受系统内部参数摄动的影响.
表1 不同状况下控制器能耗指标对比
Tab.1 Comparison of controller energy consumption indicators under different conditions
控制状况D-Smith解耦控制Smith预估控制标称状况1.528×1041.537×104惯性时间+20%摄动1.536×1041.545×104时滞时间+20%摄动1.539×1041.548×104惯性时间-20%摄动1.522×1041.531×104时滞时间-20%摄动1.524×1041.533×104
5 结语
本文针对压缩式制冷系统强耦合、大时滞、多干扰且运行时存在诸多不确定因素等问题,提出一种基于DOB的改进Smith预估解耦控制策略.通过仿真试验与常规Smith预估控制对比,验证了本文改进方法在控制系统运行时,各变化量的超调更小、解耦效果更强,且进一步减小了约 0.6% 的系统能耗;当系统发生参数摄动时,本文方法表现出更强的抗扰性及鲁棒性,且其节能效果基本不随参数摄动而改变.此外,本文方法的控制器设计结构简单,运算量小,为下一步工程实现提供了可能.
