飞行团队协作能力测试系统研究与开发
2019-05-25惠铎铎马进张利利高敏超胡文东
惠铎铎, 马进, 张利利, 高敏超, 胡文东
(空军军医大学 航空航天医学系, 西安 710032)
0 引言
团队是由多个个体组成,团队中个人的协作配合能力会直接影响到团队整体绩效,不能很好协作不但会破坏团队氛围,也使他人能力得不到很好的发挥。在个体能力不尽相同时,个体间积极协作配合将一定程度上弥补“短板效应”造成的缺陷;团队成员若不能很好的配合,不但团队整体绩效只能维持在低水平,而且成员间人际关系将会恶化[1-2]。飞行团队也是如此,随着航空航天事业越来越发达,复杂的飞行任务不能由单个人完成,越来越复杂的空间站任务和空间实验室任务,也需要团队协作配合完成任务[3-4]。因此,在选拔阶段需要对候选者的协作配合能力进行评价和筛选,要求乘组成员能更加考虑组内其他成员,彼此协作,团结他人完成任务[5]。同时也需要对各个不同团队的绩效有一个客观评价来进行参考[6]。
本文通过查阅文献及专家访谈对飞行团队协作工作中的心理运动过程进行抽象模拟,将飞行团队抽象为1-5人团队,其中1人团队时为测试单人协作能力,2-5人时可用于测试飞行团队的绩效,测试时每个飞行团队都有一个共同的目标任务,每个人都必须与其他人配合才能完成共同的目标。
该测试的软件设计包括服务端和客户端两部分,最多可以测试5人,最少可以测试1人。主试人员控制服务器,参试人员分别控制一台计算机,并访问服务端,所有参试人员登录成功后,才可以开始测试。该测验中,团队每人控制一个自己的运动球围堵目标任务球,使目标任务球尽量保持在中心点。目标任务球是根据其他被试控制的受控球的运动方向和速度来自动计算自身运动方向,其运动方向为始终沿与自身构成最大围堵夹角的两个受控球夹角平分线方向突围。目标任务球的运动速度是可以通过服务器端进行设置的。每次测试时间为60秒,测试过程中,目标任务球向所有受控球相邻角度最大的方位运动,并随时寻找最大角度逸出最大范围,要求被试利用摇杆控制操纵受控球,与团队其他成员一起使目标任务球控制在范围内,如果目标任务球逃逸出最大范围则任务失败,在测试时间内失败次数将作为团队绩效的考察指标。在测试过程中,共有5个受控球,若测试团队人数少于5人,无人控制的受控球则由电脑自动控制,即智能球。若只有一个人控制受控球,其他四个都是智能球,这种模式下测试的是个人协作能力。
1 软件实现
该测试系统是在win7操作系统下开发的,集成开发环境为Microsoft Visual Studio 2010,三维开发引擎为OpenGL,网络通信协议为TCPIP协议。测试程序由服务端应用和客户端应用组成。服务端应用由管理员操作,实现指定网络端口监听及远程连接管理、测试参数设置、测试逻辑及实时数据处理、客户端连接状态监控、测试开始与停止控制、结果数据记录功能。客户端应用由受试人员操作,实现人员信息录入、操纵杆量采集、实时数据收发、图形界面呈现。服务器与客户端交互过程图如图1所示。
每个参试者通过与服务器的数据交互可以实时了解自己以及团队其他成员完成任务的情况以及状态,同时通过摇杆控制自己的受控球以配合团队其他成员完成任务。服务器主试通过客户端发来的实时数据对各个客户端实现监控,同时通过传送指令给客户端以实现客户端的参数配置以及开始暂停和测试数据收集。
其中,服务器端应设置的参数为人工受控球在操纵杆满量程操作时,所能达到的速度与标准速度(归一化值为1)的百分比值。此值越小,受控球极限速度越低,相应任务难度越高。
在测试过程中目标任务球寻找与其形成最大夹角平分线方向运动,当其位置相对屏幕中心点超指定距离时判为任务失败一次。其在软件中的具体算法如式(1)。
(1)
示意图如图2所示。
图2中,θt为t时刻目标球运动方向角,αti为各围堵球与目标球间形成的夹角,βtMax为t时刻形成围堵最大角的左受控球与目标球、横坐标轴间形成的夹角,xt、yt为t时刻目标球所处的位置横、纵坐标值(坐标原点[0,0]对应屏幕中心点坐标),v0为设定的目标球速度。
受试者控制的受控球运动值由其控制的操纵杆量及设定速度(角速度)的时间序列函数决定。在t时刻,其位移时间序列算法为式(2)。
(2)
其中,Cxit、Cyit为受试者杆量横向、纵向分量的归一化值,αMAX为设定的受控球角速度极值,vMax为设定的受控球最大速度,R为设定的受控球圆周运动轨道半径,i代表受控球编号。
若受控球无人操作为智能球,其位移时间序列算法为式(3)。
其中,ki为速度方向系数,βilt、βirt为t时刻时该智能球左侧、右侧形成的围堵夹角,αitemp为t时刻该智能球的运动目标点位置与目标球、x轴构成的夹角,stemp为该智能球的运动目标点位移,xot、yot为t时刻目标球位置横、纵坐标,p为设定的智能球与人工受控球的速度比,xit、yit为t时刻该智能球应处于的位置横、纵坐标值。
(3)
当客户端收到服务端下发的任务开始命令后,服务端将每间隔40 ms采集一次与本机连接的客户端杆量数据以及各球的位置信息,并将各球的位置信息下发给各个客户端呈现出来。服务器端记录的数据包括测试时间、测试时长、智能球和手控球速比、目标球速、任务失败次数以及每次任务失败时的目标球与5个受控球实时的状态数据,同时还记录每次任务失败时的统计数据,包括五个受控球与目标球的平均距离、左侧围堵夹角均值、左侧围堵夹角标准差、右侧围堵夹角均值、右侧围堵夹角标准差。
2 软件应用
由于我们将该软件用于单人选拔和团体选拔两种模式,所以软件应用实验分为单人和团体两种来做。本文实验中的所有数据的处理都采用SPSS16.0统计软件。通过前期做过大量不同参数不同测试等级的预实验,发现在单人测试中当智能球与手控球速度比为70%,手控球最大速度为100,目标球速度选择5、7、9时,测试难度适中,区分度较好;在团体测试中,当智能球与手控球速度比为70%,目标球速度/手控球最大角速度为5/70,7/100,9/130时难度适中,区分度较好。选取25-35岁的男性被试50人,学历本科以上,右利手,进行实验。首先进行单人测试实验,目标球速度选择5、7、9时,每种测试方案均练习1分钟后再进行正式测验。对单人测验各个不同测试等级的原始结果进行正态性检验,KS-Z为正态检验统计量的值,而P为双尾渐进概率值(若P>0.05,表示数据分布与理论分布无显著差异)。结果显示方案9所得数据均为偏态分布,说明该测试等级过于困难,导致参试者得分分布情况的差异,该方案不适合用来测试,方案5和方案7符合正态性分布可以用来测试,具体结果见表1。对于团体测试,5人一组进行测试,共10组,每组在测试不同方案之前进行1分钟的练习。对团队测试各等级的原始结果进行正态性检验,结果显示数据符合正态分布,具体结果如表1所示。
3 总结
本文通过对航空航天飞行团队飞行任务的研究以及飞行人员性格等的研究,结合执行团队飞行任务时的心理运动能力各个要素的研究,对航空航天飞行人员执行协作能力时的行为进行抽象,开发了本套测试软件,可用于测试单人协作能力测试以及团体协作能力测试,并分别对其进行实验验证。通过实验得到符合正态分布的单人及团队测试等级,证明该套测试系统对于飞行团队个人以及团队的选拔测试具有实用意义。由于本文只是一个初步研究,被试数量有限,所以在团队测试的分组实验中只做了10组测试,样本量略有不足。应进一步扩大软件的应用范围在航空航天飞行团队组建中,同时也为航空航天团队选拔测试客观化计算机化的提供进一步研究的基础。
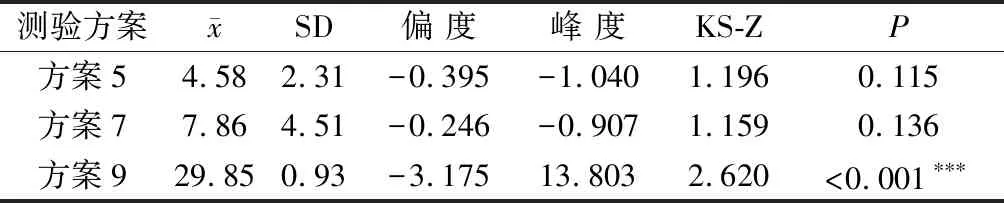
表1 单人测试正态性检验结果
Note:***signifyP<0.001.
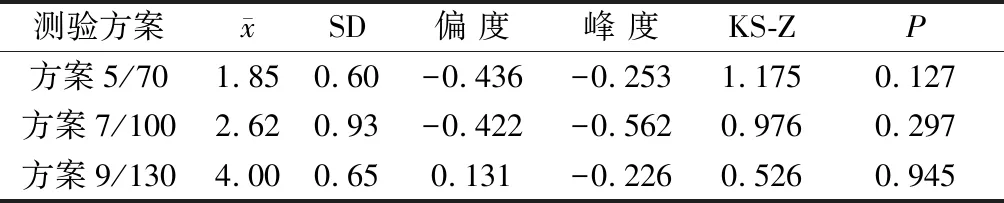
表2 团体测试正态性检验结果
