基于钵苗运动动力学模型的鸭嘴式移栽机结构优化
2018-06-01姬江涛刘卫想何亚凯杜新武
金 鑫,姬江涛※,刘卫想,何亚凯,杜新武
(1. 河南科技大学农业装备工程学院,洛阳471003;2. 机械装备先进制造河南省协同创新中心,洛阳 471003;3. 河南林业职业学院,洛阳 471002;4. 中国农业机械化科学研究院,北京 100083)
0 引 言
鸭嘴式栽植机构在钵苗移栽过程对钵苗无夹持作用,钵苗移栽全程运动是自由的,不易损伤,广泛应用于现有移栽机型[1-5]。然而,在对钵苗进行移栽作业的过程中,钵苗不可避免的会与栽植器本身发生作用,并且随着栽植机 构转速的增加,钵苗与栽植器间的相对运动也会发生一些变化,使得钵苗的直立率有所下降,甚至导致钵苗的漏栽现象,影响移栽作业过程中的栽植质量[6-7]。
目前对移栽过程的研究主要集中在取苗、栽植过程相关机构的研究[8-18]及钵苗相关的物理机械特性方面的研究[19-22],对移栽过程中钵苗的运动方面的研究相对较少,主要有向卫兵等[23]采用ANSYS/LS-DYNA分析软件建立了钵苗从穴盘孔中吹出及与导苗管壁面相碰过程的有限元模型,获得了钵苗吹出和碰撞的运动规律;陈建能等[24-25]将钵苗在鸭嘴式栽植器内的运动过程分为了 3个运动阶段,并建立了钵苗在 3个运动阶段的运动微分方程,找出了变形椭圆齿轮行星轮系栽植机构的最高转速;刘洪利等[26]对玉米植质钵苗在投苗过程中的运动情况进行了分析研究,建立了钵苗翻转及位移变化运动方程;彭旭等[27]建立了钵苗在导苗管中的运动学和动力学模型,对钵苗在导苗管中的运动及影响钵苗直立率的因素进行了分析研究。
本文通过采用透明式有机玻璃以及高速摄像机对钵苗在鸭嘴式栽植器内的运动过程进行试验记录,根据试验记录的结果对钵苗与鸭嘴式栽植器间的互作特性进行研究分析,探索高速作业条件下钵苗的栽植机理,找出导致钵苗倒伏率增加及漏栽率上升的根本原因,以期为鸭嘴式钵苗高速移栽转速和栽植结构的优化设计提供参考。
1 钵苗栽插下落过程分析
高速移栽作业条件下,钵苗从导苗筒下落至鸭嘴栽植器底部的过程中,钵苗与栽植器间存在着复杂的相对运动关系,钵苗与鸭嘴之间的相对运动对栽植质量有较大的影响。为真实有效描述钵苗在栽植器中运动过程,本文通过高速摄像对苗龄为 40d,基质成分为草炭:蛭石:珍珠岩=3∶1∶2,土钵含水率为 55%下的辣椒钵苗进行下落过程试验研究。
采用图像后处理方法对栽植机构转速分别为40,60,80 r/min下的钵苗在有机玻璃栽植器内的整个运动过程进行分析,分析得到在 3个不同的转速下,钵苗在栽植器中下落过程均会出现以下6个阶段(图1用虚线圆标注了钵苗的位置):1)钵苗在空中自由下落阶段(见图1-1),该阶段为钵苗开始下落到与栽植器壁面接触前在空中自由下落的过程;2)钵苗落入鸭嘴栽植器内时与栽植器壁面产生碰撞[24-28](见图 1中 1-2),该过程为钵苗与栽植器壁面的碰撞阶段;3)钵苗与栽植器碰撞过程结束后,钵苗被弹起,在栽植器内做斜抛运动,该过程为斜抛运动阶段(见图1中1-3和1-4);4)钵苗在运动到鸭嘴部分时与鸭嘴壁面发生碰撞,该过程为钵苗与鸭嘴壁面发生碰撞的阶段(见图1中1-5);5)钵苗与鸭嘴壁面碰撞结束时,开始一边绕与鸭嘴壁面的接触点旋转,直至钵苗土钵侧面与鸭嘴壁面贴合,一边沿鸭嘴壁面下滑,该过程为钵苗在鸭嘴内的平面运动阶段(见图1中1-6);6)钵苗土钵与鸭嘴壁面贴合完成后,开始沿鸭嘴壁面下滑,直至落至鸭嘴底部,该过程为钵苗沿鸭嘴壁面下滑阶段(见图1中1-7和图1中1-8)。
通过试验分析,栽植机构转速在40和60 r/min均会出现明显的6个运动过程,但当转速为80 r/min时,会出现一段钵苗与鸭嘴栽植器保持相对静止甚至有上滑趋势。因此,随着栽植机构转速的继续增大,在栽植器运动至栽植点时,钵苗还未落至栽植器的底部,从而导致钵苗的漏栽及产生严重的倒伏现象。

图1 转速为80 r·min–1时钵苗在鸭嘴中运动过程分析Fig.1 Analysis of movement of pot seedling in duckbilled planter at rotating speed of 80 r·min–1
2 栽插过程钵苗下落与栽植器间运动受力分析及模型建立
为了对钵苗与鸭嘴栽植器间的运动与受力进行理论研究,首先建立栽植机构的运动学模型,然后在此基础上分析力学特性。
2.1 栽植机构运动学模型的建立
行星轮系栽植机构的结构简图如图 2所示。以行星轮系栽植机构中心轴为坐标原点,以水平向左的方向为X轴的正方向建立直角坐标系XOY,其中,点A为行星轮系栽植机构行星轴轴心。
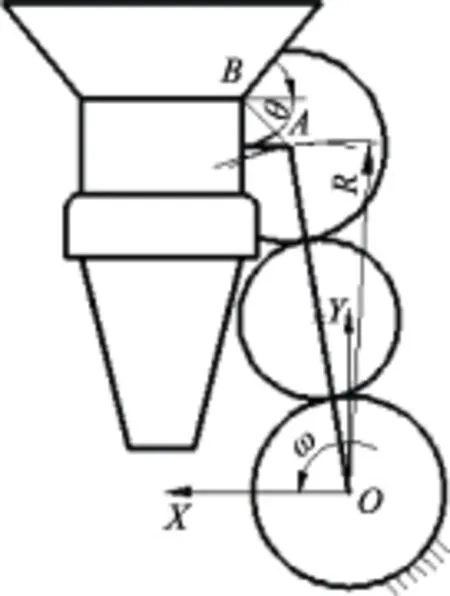
图2 行星轮系栽植机构结构简图Fig.2 Structural diagram of planetary gear train planting mechanism
行星轮系栽植机构鸭嘴栽植器上点B的坐标方程为

式中θ=40°;t为钵苗从开始下落到落至栽植器底部时的时间,s;φ0为钵苗开始下落时栽植机构(OA)与X轴负向角,(°);lAB为AB两点间距离,m,已知lAB=0.0335m。
2.2 钵苗自由下落过程模型建立
钵苗在开始下落至与栽植器壁面接触的一段过程内做自由下落运动,其钵苗做自由下落过程的分析简图如图3a所示。在该过程中钵苗竖直方向初速度为0,钵苗受自身的重力及下落过程中空气的阻力[29]。
则钵苗在竖直方向上所受合力F1为

式中mB为试验时所用钵苗质量,kg;g为重力加速度,m/s2,取g=9.8 m/s2;v为钵苗在t时刻的速度,m/s;vL为钵苗的漂浮速度,m/s。
选用苗龄为 40d,基质成分为草炭:蛭石:珍珠岩=3∶1∶2,钵苗土钵含水率为 55%的钵苗进行漂浮速度测定。其测定方法[29-30]是通过高速摄像试验对钵苗的自由下落过程进行记录,通过后期图像处理软件确定下落位移和下落时间,得钵苗的漂浮速度vL为3.5~7.6 m/s,本文取vL=5.55 m/s,其中,令k=g/vL2。

图3 钵苗落入鸭嘴前运动受力分析Fig.3 Analysis of movement of pot seedling before falling into duckbill
则对式(2)进行积分可得钵苗自由下落阶段的速度及位移h2方程为
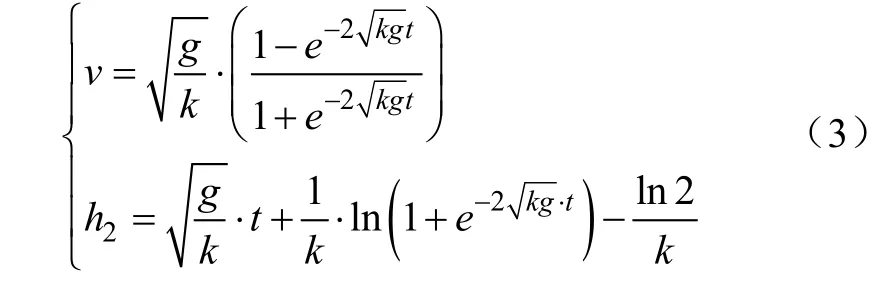
式中e为钵苗的恢复系数。
在钵苗下落过程结束时,钵苗与栽植器壁面相碰,设其碰撞点为P1,则碰撞点P1与栽植器上的点B在坐标系XOY内的横、纵坐标的差值为

式中Δx/Δy=tanβ;n为土钵下表面边宽,m;H为钵苗开始下落时,在坐标系XOY内的纵坐标值,m。
2.3 钵苗与栽植器壁面碰撞过程模型建立
自由下落过程结束时,钵苗与鸭嘴栽植器壁面产生碰撞,其碰撞位置为钵苗的下边沿。建立惯性坐标系XOBY(坐标原点为钵苗质心OB),及相对坐标系X′OBY′(坐标原点与惯性坐标系坐标原点重合),其中横坐标与栽植器壁面相垂直。碰撞过程运动分析如图3b所示。
由于钵苗的质量主要集中在钵苗土钵上,因此忽略土钵以上苗叶对钵苗质量的影响,则钵苗质心距钵苗土钵底面的距离h1d为

式中h1为土钵高度,m;h1d钵苗质心距苗钵底面的距离,m;m为钵苗土钵上表面边宽,m。
由图3b中钵苗受力分析可知

式中1BOPr 为碰撞点P1到钵苗质心OB的距离,m。
钵苗在与栽植器壁面碰撞的过程中做平面运动,根据冲量定理及冲量矩定理,对钵苗的碰撞过程建立运动方程

式中J为钵苗绕其质心的转动惯量,J=1.81×10–6kg·m2。
由于钵苗的碰撞时间极短,忽略碰撞过程中钵苗与栽植器壁面间的摩擦力对其的影响,则有

根据理论力学碰撞理论内容,对于材料确定的物体,碰撞后物体恢复系数的值基本不变[25]。由于钵苗在与鸭嘴栽植器壁面进行碰撞时忽略了钵苗与栽植器壁面间的摩擦力对其的影响,则碰撞前后钵苗的冲量仅在垂直于栽植器壁面的方向发生了变化,由于钵苗与栽植器碰撞过程中对栽植器产生的影响较小,因此认为碰撞前后栽植器的速度并未发生变化,则恢复系数e为此时

式中v′为第一次碰撞后钵苗在碰撞点P1处X′轴分速度,m/s;1Pxv′为栽植器在P1点处X′轴向上的速度分量,m/s;v1x′为钵苗自由下落结束时钵苗质心X′轴分速度,m/s。
恢复系数测定方法:采用高速摄像系统对钵苗自由落体运动的下落与回弹过程进行记录,并采用后期处理软件对该自由下落过程进行分析,得出钵苗与栽植器壁面碰撞的恢复系数e取值0.174~0.184,本文在对钵苗的运动过程进行分析时选取钵苗的恢复系数为e=0.179。
由式(8)~式(10)得出钵苗与栽植器壁面碰撞结束后的速度、角速度为
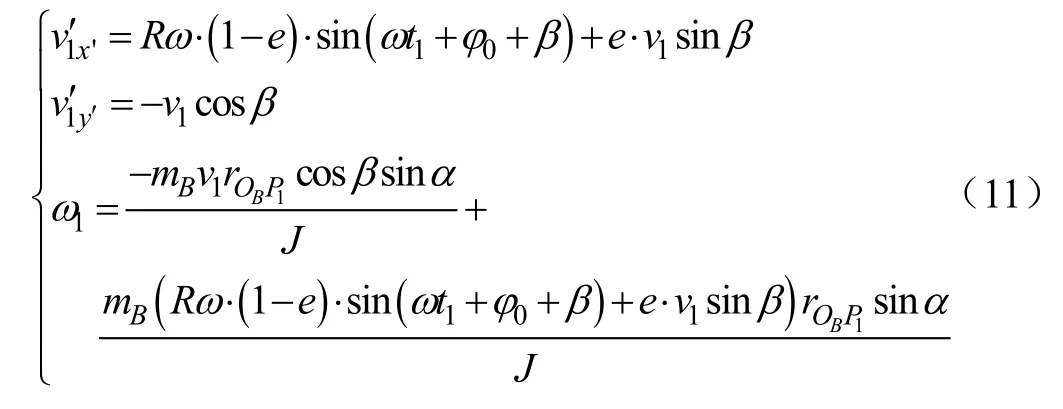
式中t1为自由下落阶段钵苗在空中下落的时间,s。
2.4 钵苗在栽植器内做斜抛运动过程
在分析钵苗斜抛运动时,忽略钵苗在运动过程中重力及空气阻力对钵苗绕其质心时对其角速度的影响,设定钵苗在做斜抛运动的过程中绕其质心旋转的角速度固定不变,并将钵苗作为一个质点进行研究[31]。由于钵苗在栽植器内运动的同时,栽植器也在绕其旋转中心做角速度为ω的旋转运动,因此运用相对运动力学的拉格朗日方程来对在栽植器内做斜抛运动的钵苗进行动力学分析[32]。其中,钵苗在栽植器内做斜抛运动过程的受力分析如图3c所示。
以行星轮系的旋转中心O为坐标原点建立惯性坐标系XOY,坐标系X′AY′固联于行星轴轴心,设钵苗质心在坐标系X′AY′中的坐标值为(s1,h3),则钵苗相对运动动力学微分方程为

由于碰撞时间较短,因此忽略钵苗与栽植器壁面碰撞时间,则钵苗在栽植器内做斜抛运动过程中质心在惯性坐标系XOY中竖直方向的瞬时速度BOyv 为

设钵苗在栽植器内开始做斜抛运动时其质心在坐标系X′AY′中的初始坐标值为(s10, h30),则有
式中l2为点A到鸭嘴的水平距离,mm,已知l2=26 mm。
由于钵苗在栽植器内做斜抛运动,其在水平方向受力为 0,可得出钵苗质心在 X′AY′内的水平方向的位移与速度为

式中v′1x第一次碰撞结束时钵苗质心X轴分速度,m/s。
由式(12)~式(15)可得出钵苗质心在X′AY′内的竖直方向的位移h3、速度3h˙及加速度3h˙为
2.5 钵苗与栽植器鸭嘴壁面碰撞过程
钵苗在栽植器内做斜抛运动结束时与栽植器鸭嘴壁面产生碰撞,且钵苗与鸭嘴栽植器的碰撞位置为钵苗的下边沿,设钵苗与栽植器壁面的碰撞点为P2。建立惯性坐标系XOBY(坐标原点为钵苗质心的位置OB),建立相对坐标系X′OBY′(坐标原点与惯性坐标系坐标原点重合,横坐标与鸭嘴壁面相垂直),对钵苗与鸭嘴壁面碰撞过程的运动分析如图4a所示。则可知P2OB与X′轴之间夹角α1。

式中β1鸭嘴壁面与水平面间的夹角,(°),已知β1=78°;t2斜抛阶段钵苗在栽植器内运动时间,s。
碰撞点P2与钵苗质心OB之间连线的距离2BOPr 为

钵苗在与鸭嘴壁面碰撞的过程中做平面运动,由冲量定理及冲量矩定理可知
式中 v′2x′为第二次碰撞结束时钵苗质心 X′轴分速度, m/s;v′2y’第二次碰撞结束时钵苗质心Y′轴分速度,m/s;v2x′斜抛运动结束时钵苗质心X′轴分速度,m/s;v2y′斜抛运动结束时钵苗质心Y′轴分速度,m/s;ω2第二次碰撞结束时钵苗角速度,(°)/s。
由于钵苗的碰撞时间极短,忽略碰撞过程中摩擦力对其的影响,则有此时

式中v2x为第二次碰撞前钵苗质心在X轴上分速度,m/s;v2y为第二次碰撞前钵苗质心在Y轴上分速度,m/s。
以钵苗质心OB点为基点,则碰撞后钵苗在碰撞点P2处的速度2Pv′为

式中v′2为第二次碰撞结束时钵苗质心的速度,m/s;2BPOv′为第二次碰撞结束后碰撞点 P2相对钵苗质心的相对速度,m/s。

图4 钵苗落入鸭嘴中运动受力分析Fig.4 Movement analysis of pot seedling falling into duckbilled planter
将(21)式沿相对坐标系横坐标方向投影可得:

式中 v′2x′第 2次碰撞结束时钵苗质心 X′轴分速度,m/s;rOBP2为碰撞点P2到钵苗质心OB的距离,m;α1为碰撞点P2与钵苗质心的连线与相对坐标轴横坐标之间的夹角,(°)。
由高速摄像试验分析结果可知钵苗在与鸭嘴壁面碰撞后钵苗与栽植器间的相对速度相差很小,钵苗回弹的程度很小(即钵苗与栽植器碰撞后在极短的时间内与栽植器接触),并开始绕与栽植器的接触点进行旋转直至与栽植器壁面贴合,因此忽略钵苗碰撞后的回弹,对该过程简化后可知

式中 vP2x为栽植器在P2点处X轴向上的速度分量,m/s;vP2y栽植器在P2点处Y轴向上的速度分量,m/s。
由式(19)~式(23)可知钵苗与鸭嘴壁面碰撞结束后的速度、角速度为

2.6 钵苗在栽植器鸭嘴内的平面运动过程
钵苗在鸭嘴内平面运动受力分析如图4b所示。利用牛顿定律和动量矩定理可得钵苗在鸭嘴内的运动微分方程为
式中x′˙、y′˙分别为钵苗质心的加速度在相对坐标系X′、Y′轴上的分量,BOθ˙为钵苗转动的角加速度,BOθ为钵苗碰撞点与钵苗质心间的连线与相对坐标系 X′轴之间的夹角;μ为钵苗与栽植器壁面间的摩擦系数,已知μ=0.5389。
钵苗在该阶段一边下滑,一边绕P2转动,选取钵苗质心OB为基点,对P2点进行加速度合成定理可得

式中aP2为钵苗在接触点P2处的加速度,m/s2;aOB为钵苗质心 OB的加速度,m/s2;aτP2
OB为接触点 P2相对钵苗质心 OB的切向加速度,m/s2;aPn2OB为接触点 P2相对钵苗质心OB的法向加速度,m/s2。
将式(26)在相对坐标系 X′OBY′横坐标上进行投影可得

根据钵苗在鸭嘴内的运动分析可知,钵苗与鸭嘴壁面的接触点 P2在相对坐标系 X′OBY′横坐标上的加速度aP2x′= 0 ,则有

则联立式(25)~式(28)可得
式(29)为一微分方程,该微分方程的初始条件为采用改进的欧拉方法对该微分方程进行求解,求得钵苗在鸭嘴内做平面运动过程中每一时刻的角度、角速度及角加速度。将求得的结果带入式(25)得出钵苗在该运动过程中的FN及 Ff。
2.7 钵苗沿栽植器鸭嘴壁面下滑过程
钵苗在鸭嘴内平面运动过程结束时开始沿鸭嘴壁面下滑。为了简化钵苗下滑运动模型,忽略该过程中的空气阻力,并将钵苗简化成一个质点进行分析,则钵苗沿鸭嘴壁面下滑时的受力分析如图4c所示。
将钵苗与栽植机构作为一个质点系来进行动力学分析,其中该质点系由载体(行星轮系)和被载体(钵苗)组成,其中载体以角速度ω绕旋转中心O匀速旋转,因此可运用相对运动力学的拉格朗日方程来对钵苗沿鸭嘴壁面下滑过程进行分析。以行星轮系的旋转中心O为坐标原点建立惯性坐标系XOY,坐标系X′AY′固联于行星轴轴心,设鸭嘴部分上口面与钵苗质心在 Y′轴方向上的距离为 s2。则参照斜抛运动过程拉格朗日方程可得出,钵苗下滑过程的运动微分方程。

式(30)为一微分方程,对该微分方程进行求解,可得下滑过程中钵苗质心在坐标系X′AY′内位移、速度和加速度
3 钵苗与栽植器运动过程编程及下落时间分析
3.1 钵苗运动过程辅助分析程序
根据所建立的钵苗在鸭嘴栽植器内的运动过程动力学模型,以移栽辣椒钵苗的最佳参数组合(苗龄为40d、基质成分为草炭:蛭石:珍珠岩=3∶1∶2、土钵含水率约55%)为基础,采用Visual Basic 6.0语言编写了钵苗下落过程运动状态及时间的辅助分析程序(如图5所示)。通过人机对话,用户可以改变各参数数值,其中包括钵苗开始下落时栽植器的位置、钵苗开始下落时相对栽植器旋转中心的位置、栽植器倾角、高度等结构参数,根据软件的输出可获得钵苗不同下落阶段的运动状态及时间,判断出钵苗运动到鸭嘴栽植器底部时栽植器相对栽植点的位置,从而改进设计栽植机构的结构参数。
3.2 钵苗下落过程时间分析
根据钵苗在鸭嘴栽植器内的运动过程分析可知,钵苗从开始下落到落至栽植器底部时所运动的时间 t主要包括以下4个时间段,即:
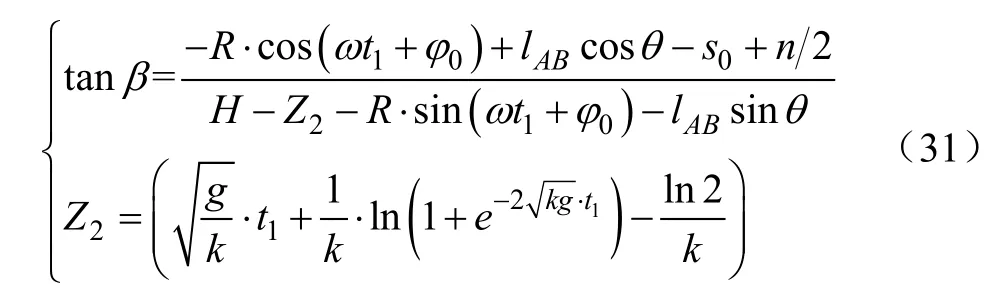
1)钵苗在空中自由下落阶段所用的时间t1。由式(3)和(4)可得式(31),则可得出钵苗在空中自由下落过程中所用t1。
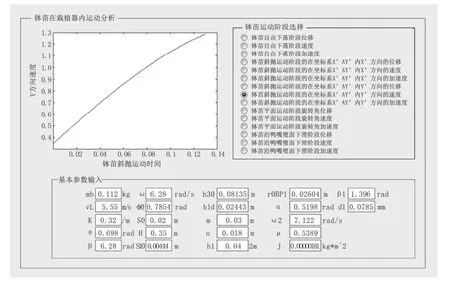
图5 钵苗运动过程辅助分析界面Fig.5 Auxiliary analysis interface of motor process of pot seedling
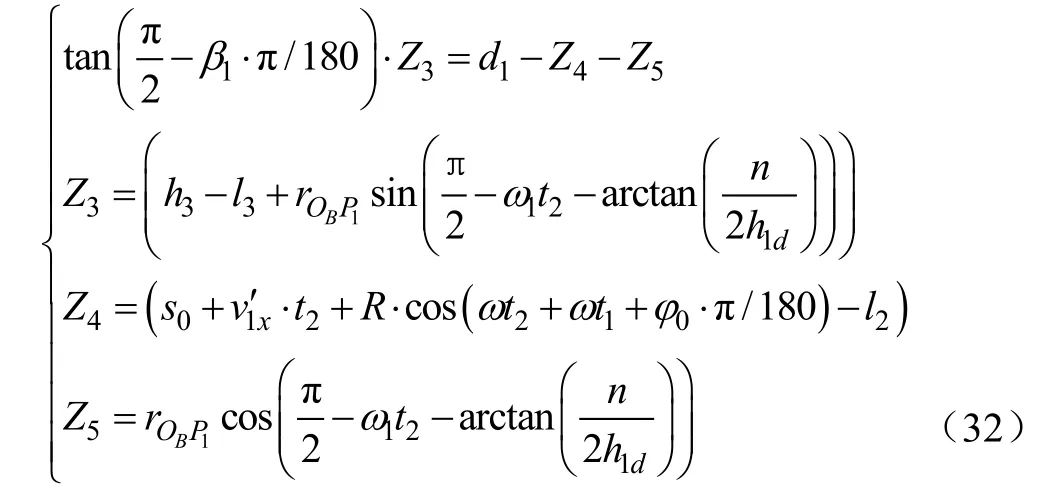
2)钵苗在栽植器做斜抛运动所用的时间t2。通过对钵苗的高速摄像试验结果可以发现钵苗斜抛运动结束时钵苗底部与鸭嘴壁面相接触,通过对钵苗及栽植器接触点间的几何关系可以得出钵苗斜抛运动过程的时间t2。因此,由式(15)和(16)可得式(32),则可得出钵苗在栽植器内做斜抛运动所用的时间t2。
3)钵苗在栽植器鸭嘴内的平面运动过程所用的时间t3。在该过程中,钵苗绕与栽植器的接触点旋转,最终与栽植器壁面相贴合,因此钵苗旋转过程中钵苗碰撞点与钵苗质心间的连线与相对坐标系X′轴之间的夹角θOB的最大值 θ OBmax 为

因此,通过钵苗平面运动过程微分方程所得出的钵苗平面运动过程角度方程得出钵苗平面运动过程所用时间 t3。
4)钵苗沿栽植器鸭嘴壁面下滑所用的时间t4。对钵苗沿栽植器鸭嘴壁面下滑微分方程进行求解,求得钵苗沿鸭嘴壁面下滑过程中钵苗质心, 在坐标系 X′AY′内的位移s2,则钵苗运动至栽植器底部时则有

式中HZ为鸭嘴部分上口面至鸭嘴底部距离,mm。
由式(34)可求得钵苗从平面运动过程结束到下滑至鸭嘴底部时所用的时间t4。
通过对钵苗及栽植机构的运动过程分析可知,当钵苗从开始下落至落至栽植器底部时所用的时间 t小于栽植器从钵苗开始下落至运动至最低点时的时间 t′时钵苗能够顺利落入到沟穴内,否则,钵苗则会出现倒伏甚至漏栽的现象。
由于钵苗与栽植器壁面的碰撞时间极短,因此忽略钵苗碰撞过程中所用的时间,则钵苗从开始下落至落至栽植器底部时所用的时间t为

令栽植器从钵苗开始下落至运动至最低点时的时间为 t′,则

4 移栽机结构参数优选
通过对钵苗下落过程中各运动阶段所需时间进行分析发现,当钵苗的下落时间小于栽植器从钵苗开始下落至运动至栽植点处的时间时,钵苗能够顺利完成移栽作业,并且两者的时间差越大对钵苗的移栽作业越有利。故以此为目标,对栽植机构结构参数进行优化。
由钵苗运动过程理论模型分析可得出,影响钵苗下落过程的时间的主要因素有:1)钵苗开始下落时的初始位置(s0,H);2)钵苗开始下落时栽植器的相位角φ0;3)鸭嘴上苗杯壁面与竖直面间夹角 β;4)栽植器鸭嘴壁面与水平面间夹角 β1;5)鸭嘴开口部分高度 HZ;6)栽植器竖段的高度l1,l3。
由于受栽植深度、钵苗高度及栽植机构尺寸的限制,鸭嘴栽植器高度的改进幅度并不大,因此在结构参数优化过程忽略此因素。
鸭嘴栽植器上苗杯壁面与竖直面间的夹角 β较大时栽植器间会产生干涉,较小时钵苗不能顺利落入栽植器内,因此优选β1为40°。
栽植器鸭嘴部分倾角 β1主要影响钵苗斜抛运动、钵苗平面运动及钵苗下滑运动时间,β1的值越大钵苗运动过程的时间越小,但是当 β1值过大时会导致钵苗在下滑过程中钵苗翻转,加大钵苗的倒伏。因此,结合 2个因素经对钵苗下落过程时间分析取β1为82°。
栽植机构在不同转速条件下钵苗的初始下落位置是固定不变的,故需优选出一组最佳初始落苗位置以适应多种栽植速度,且能够在栽苗前顺利落入到栽植器底部。
结合钵苗下落运动过程动力学模型及辅助分析界面对钵苗运动过程进行优化分析可得,栽植机构的转速在40 r/min时,φ0=25°;栽植机构的转速在 60 r/min时,φ0=40°;栽植机构的转速在80 r/min时,φ0=55°;初始落苗位置为(40 mm, 350 mm)。
对比初始设计栽植机构运动过程可知,当优化前栽植机构的转速达到80 r/min时,栽植器运动至最低点(即栽植点)时,钵苗还未落入栽植器底部,严重影响了栽植效果;通过对改进后栽植机构的钵苗下落分析得出其下落时间(t=0.4129s)小于栽植器运动栽植点处的时间(t′=0.5104s),表明了优化后的栽植机构能够使钵苗顺利落入到栽植器底部,从而保证了良好地栽植效果。
5 钵苗下落试验
根据栽植机构互作过程中栽植器结构及钵苗初始下落位置优化的参数,对栽植器进行加工与优化,借助高速摄像机对钵苗与栽植器互作过程进行试验,以对优化后的栽植机构进行评价。
5.1 试验材料及设备
1)试验材料。本实验所用穴盘苗为河南省现代农业研究开发基地进行培育的穴盘苗,苗盘规格为 128穴,苗龄为40d,钵苗土钵含水率为55%,基质成分为草炭:蛭石:珍珠岩为3∶1∶2的601型辣椒钵苗。
2)试验设备。Phantom系列高速摄像机(美国VRI公司生产),PCC控制拍摄及后期图像处理软件优化结构参数后的行星轮系栽植机构试验台(如图6所示)。

图6 改进后栽植装置-高速摄像试验系统Fig.6 Improved planting device and high-speed camera test system
5.2 试验方法
本试验过程采用一个1.5 kW的白光进行照射,高速摄像机摄速率250幅/s,试验钵苗土钵采用白色反光纸进行标记,且一直保持鸭嘴栽植器为张开状态。为准确控制栽植机构转速和初始相位,本试验选用步进电机为动力源,并对该步进电机采用接近开关来进行启动,调整接近开关的安装位置,能够调节钵苗开始下落时栽植机构行星轴轴心O与栽植器旋转中心A与水平面的夹角φ0。打开高速摄像机及灯光的电源,调整摄像机及灯光的位置,调整接近开关使初始角φ0为25°,启动电机并控制转速为80 r/min,对钵苗开始下落至离开栽植器的过程进行拍摄记录,后期采用PCC软件跟踪拾取标记点,对钵苗从开始下落在离开栽植器的时间进行分析。
5.3 试验结果分析
钵苗开始下落及钵苗移栽栽植器内的高速摄像截图如图 7所示,其中钵苗在图中采用白色方点及细实线框标示出。
通过高速摄像试验可以发现,栽植机构转速80 r/min时,栽植器未运动至最低点时,钵苗已经离开了栽植器,即钵苗下落的时间小于栽植机构从钵苗开始下落到运动至最低点栽苗处的时间,说明优化改进后的栽植器,能够使钵苗顺利完成移栽,也验证栽植机构改进设计的正确性。
其中,采用高速摄像后处理软件PCC来对钵苗从开始下落至离开栽植器的时间进行获取,得出在最佳初始落苗位置、栽植器初始相位角及栽植器优化后的结构参数下的钵苗下落时间 t0=0.4375s,与理论分析结果t=0.4129s,两者相差Δt=0.0246s。其中,时间的误差主要来源于忽略钵苗碰撞过程的时间及忽略钵苗斜抛运动过程中钵苗阻力对钵苗旋转角速度的影响。
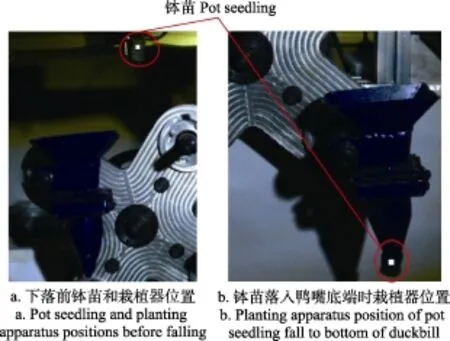
图7 钵苗下落过程高速摄像结果Fig.7 High-speed camera results of falling process of pot seedling
对钵苗的初始运动位置及栽植器的改进措施,使栽植器转速不高于 80 r/min时钵苗均能顺利完成移栽,但是,在栽植机构转速增大时,钵苗在沿栽植器壁面下滑的过程中,钵苗相对栽植器向上运动,此时,对栽植器的改进措施无法使钵苗顺利落入栽植器底部,严重影响钵苗栽植效果,必须对钵苗施加额外的作用力,使钵苗顺利落入到栽植器底部,以保证良好地移栽效果。
6 结 论
本文针对现有栽植机构在高速移栽作业过程中钵苗极易出现倒伏甚至漏栽,以及钵苗损伤严重的现象,结合对现有栽植机构的分析,选取齿轮行星轮系栽植机构作为本文的移栽机构来对移栽过程中钵苗与鸭嘴栽植器间的相互作用过程进行研究,所得结论如下:
1)采用高速摄像对钵苗在有机玻璃质鸭嘴栽植器中的运动过程进行分析,得出产生倒伏或漏栽的根本原因是:栽植机构转速越大,钵苗与栽植器相对运动速度减小甚至反向,导致栽植器运动至栽植点时,钵苗还未落至鸭嘴底部。
2)明确了钵苗栽插下落过程的6个运动阶段:自由下落、与栽植器壁面碰撞、栽植器内斜抛运动、与鸭嘴壁面碰撞、鸭嘴内平面运动、沿鸭嘴壁面下滑。并建立了各阶段钵苗运动的力学模型
3)以钵苗落入栽植器鸭嘴底部时间小于栽植器运动至栽植点时间为优化目标,利用编写的钵苗运动辅助分析程序,进行了栽植机构相关参数优化,并完成验证。结果表明:钵苗最佳初始下落位置为(40 mm, 350 mm),鸭嘴栽植器上苗杯壁面与竖直面间的夹角为 40°,栽植器鸭嘴部分倾角为82°,初始相位角为25°。
[参 考 文 献]
[1] 封俊,秦贵,宋卫堂,等.移栽机的吊杯运动分析与设计准则[J].农业机械学报,2002,33(5):48-50.Feng Jun, Qin Gui, Song Weitang, et al. The kinematic analysis and design criteria of the dibble-type transplanters[J].Transactions of the Chinese Society for Agricultural Machinery,2002, 33(5): 48-50. (in Chinese with English abstract)
[2] 张祖立,王君玲,张为政,等.悬杯式蔬菜移栽机的运动分析与性能试验[J]. 农业工程学报,2011,27(11):21-25.Zhang Zuli, Wang Junling, Zhang Weizheng, et al. Kinematic analysis and performance experiment of cantilever cup vegetable transplanter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE),2011, 27(11): 21-25. (in Chinese with English abstract)
[3] Ji Jiangtao, He Yakai, Du Xinwu, et al. Design of the up-film transplanter and kinematic analysis of its planting devices[C]//ICAMechS, 2013 International Conference on. IEEE,2013: 312-316.
[4] 郑治华.膜上高速移栽机构试验研究[D].洛阳:河南科技大学,2014.Zheng Zhihua. Experimental Research of Up-film Transplanting Mechanism [D]. Luoyang: Henan University of Science and Technology, 2014. (in Chinese with English abstract)
[5] 崔巍,赵亮,宋建农,等.吊杯式移栽机栽植器运动学分析与试验[J].农业机械学报,2012,43(增刊1):35-38,34.Cui Wei, Zhao Liang, Song Jiannong, et al. Kinematic analysis and experiment of dibble-type planting devices [J].Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(Supp.1): 35-38, 34. (in Chinese with English abstract)
[6] Prasanna K G V. Raheman. Automatic feeding mechanism of a vegetable transplanter[J]. International Journal of Agricultural and Biological Engineering, 2012, 5(2): 20-27.
[7] Ye Bingliang, Yi Weiming, Yu Gaohong, et al. Optimization design and test of rice plug seedling transplanting mechanism of planetary gear train with incomplete eccentric circular gear and non-circular gears[J]. International Journal of Agricultural and Biological Engineering, 2017, 10(6): 43-55.
[8] 高国华,韦康成.自动化穴苗移栽机关键机构的模块化设计[J]. 机电工程,2012,29(8):882-885.Gao Guohua, Wei Kangcheng. Modular design for key institutions of seedling transplanting manipulator[J].Mechanical & Electrical Engineering Magazine, 2012, 29(8):882-885. (in Chinese with English abstract)
[9] 张丽华,邱立春,田素博,等.指针夹紧式穴盘苗移栽爪设计[J]. 沈阳农业大学学报,2010,41(2):235-237.Zhang Lihua, Qiu Lichun, Tian Subo, et al. Design of a needle clamping claw for plug seedling transplanting[J].Journal of Shenyang Agricultural University,2010,41(2):235-237. (in Chinese with English abstract)
[10] 韩长杰,杨宛章,张学军,等.穴盘苗移栽机自动取喂系统的设计与试验[J]. 农业工程学报,2013,29(8):51-61.Han Changjie, Yang Wanzhang, Yang Xuejun, et al. Design and test of automatic feed system for tray seedlings transplanter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013,29(8): 51-61. (in Chinese with English abstract)
[11] 孙磊,毛罕平,丁文芹,等.穴盘苗自动移栽机取苗爪工作参数试验研究[J]. 农机化研究,2013,35(3):167-170.Sun Lei, Mao Hanping, Ding Wenqin, et al. The experimental research for the working parameters of the seedling pick-up claw of the plug seedlings auto-transplanter[J]. Journal of Agricultural Mechanization Research, 2013, 35(3): 167-170.(in Chinese with English abstract)
[12] 金鑫,李树君,杨学军,等.膜上移栽钵苗栽植机构运动分析与参数优化[J].农业机械学报,2012,43(增刊1):29-34.Jin Xin, Li Shujun, Yang Xunjun, et al. Motion analysis and parameter optimization for pot seedling planting mechanism based on up-film transplanting[J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(Supp.1): 29-34. (in Chinese with English abstract)
[13] 俞高红,陈志威,赵匀,等.椭圆—不完全非圆齿轮行星系蔬菜钵苗取苗机构的研究[J]. 机械工程学报,2012,48(13):32-39.Yu Gaohong, Chen Zhiwei, Zhao Yun, et al. Study on vegetable plug seedling pick-up mechanism of planetary gear train with ellipse gears and incomplete non-circular gear[J].Journal of Mechanical Engineering, 2012, 48(13): 32-39.(in Chinese with English abstract)
[14] Feng Q C, Zhao C J, Jiang K, et al. Design and test of tray-seedling sorting transplanter[J]. International Journal of Agricultural and Biological Engineering, 2015, 8(2): 14–20.
[15] Ji Jiangtao, Jin Xin, Du Xinwu, et al. Motion trajectory analysis and performance test of up-film punch transplanting mechanism[J]. International Agricultural Engineering Journal,2015, 24(2): 30-38.
[16] 俞高红,刘炳华,赵匀,等.椭圆齿轮行星轮系蔬菜钵苗自动移栽机构运动机理分析[J]. 农业机械学报,2011,42(4):53-57.Yu Gaohong, Liu Binghua, Zhao Yun, et al. Kinematic principle analysis of transplanting mechanism with planetary elliptic gears in automatic vegetable transplanter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011,42(4): 53-57. (in Chinese with English abstract)
[17] 何亚凯,李树君,杨学军,等.凸轮摆杆式栽植机构运动分析及性能试验[J].农业工程学报,2016,32(6):34-41.He Yakai, Li Shujun,Yang Xuejun,et al. Kinematic analysis and performance experiment of cam-swing link planting mechanism[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016,32(6): 34-41. (in Chinese with English abstract)
[18] 肖名涛,孙松林,罗海峰,等.双平行多杆栽植机构运动学分析与试验[J].农业工程学报,2014,30(17):25-33.Xiao Mingtao, Sun Songlin, Luo Haifeng, et al. Kinematic analysis and experiment of dual parallelogram multi-pole planting mechanism [J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE),2014, 30(17): 25-33. (in Chinese with English abstract)
[19] 刘姣娣,曹卫彬,田东洋,等.基于苗钵力学特性的自动移栽机执行机构参数优化试验[J].农业工程学报,2016,32(16):32-39.Liu Jiaodi, Cao Weibin, Tian Dongyang, et al. Optimization experiment of transplanting actuator parameters based on mechanical property of seedling pot [J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(16): 32-39. (in Chinese with English abstract)
[20] Jin Xin, Du Xinwu, Ji Jiangtao, et al. Physical characteristics of plug seedling transplanted by the return-blank type transplanter[J]. International Agricultural Engineering Journal, 2015, 24(4): 1-10.
[21] 王英,陈建能,吴加伟,等.用于机械化栽植的西兰花钵苗力学特性试验[J].农业工程学报,2014,30(24):1-10.Wang Ying, Chen Jianneng, Wu Jiawei, et al. Mechanics property experiment of broccoli seedling oriented to mechanized planting [J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE),2014, 30(24): 1-10. (in Chinese with English abstract)
[22] Jin Xin, Du Xinwu, Ji Jiangtao, et al. Mechanical property experiment of plug seeding with pots gripping-picking[J].International Agricultural Engineering Journal, 2015, 24(4):24-33.
[23] 向卫兵,罗锡文,王玉兴,等.基于 ANSYS/LS-DYNA的钵苗运动模拟[J].农机化研究,2007,29(12):42-44.Xiang Weibing, Luo Xiwen, Wang Yuxing, et al. Kinetic simulation of pot seedling by ANSYS/LS-DYNA [J]. Journal of Agricultural Mechanization Research, 2007, 29(12): 42-44. (in Chinese with English abstract)
[24] 陈建能,夏旭东,王英,等.钵苗在鸭嘴式栽植机构中的运动微分方程及应用试验[J].农业工程学报,2015,31(3):31-39.Chen Jianneng, Xia Xudong, Wang Ying, et al. Motion differential equations of seedling in duckbilled planting nozzle and its application experiment [J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(3): 31-39. (in Chinese with English abstract)
[25] 王英.面向高立苗率要求的栽植机构参数优化与试验研究[D].杭州:浙江理工大学,2014.Wang Ying. Parameter Optimization and Experimental Study on High Seedling Erectness Rate Oriented Planting Mechanism [D]. Hangzhou: Zhejiang Sci-Tech University,2014. (in Chinese with English abstract)
[26] 刘洪利,张伟.玉米植质钵苗运动轨迹及落地形态的研究[J].黑龙江八一农垦大学学报,2016,28(3):124-128.Liu Hongli, Zhang Wei. Study on trajectory path and landing form of corn planting seedling[J]. Journal of Heilongjiang Bayi Agricultural University, 2016, 28(3): 124-128. (in Chinese with English abstract)
[27] 彭旭,宋建农,皇雅斌,等.蔬菜钵苗在导苗管中的动力学分析[J].农机化研究,2006,28(8):54-56, 59.Peng Xu, Song Jiannong, Huang Yabin, et al. The dynamics analysis of the vegetable potted seedling in the seedlingguiding tube[J]. Journal of Agricultural Mechanization Research, 2006, 28(8):54-56, 59. (in Chinese with English abstract)
[28] 孙裕晶,马成林,左春柽.组合振动式导苗机构试验研究[J].农业机械学报,2001,32(6):30-33.Sun Yujing, Ma Chenglin, Zuo Chuncheng. Experimental investigation on combined guiding device with vibration [J].Transactions of the Chinese society for Agricultural Machinery, 2001, 32(6): 30-33. (in Chinese with English abstract)
[29] 张国凤,赵匀,陈建能. 水稻钵苗在空中和导苗管上的运动特性分析[J]. 浙江大学学报:工学版,2009,43(3):529-534.Zhang Guofeng, Zhao Yun, Chen Jianneng. Characteristic analysis of rice plotted-seedlingps motion in air and on turbination-type guide-canal[J]. Journal of Zhejiang University: Engineering Science, 2009, 43(3): 529-534. (in Chinese with English abstract)
[30] 赵匀. 农业机械分析与综合[M]. 北京:械工业出版社,2008:98-108.
[31] 金鑫,李树君,杨学军,等.蔬菜穴盘苗取苗机构分析与参数优化[J]. 农业机械学报,2013,44(增刊1):1-6,13.Jin Xin, Li Shujun, Yang Xuejun, et al. Analysis and parameter optimization for vegetable plug seedling pick-up mechanism [J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(Supp.1): 1-6, 13. (in Chinese with English abstract)
[32] 梅凤翔,刘桂林. 分析力学基础[M]. 西安:西安交通大学出版社,1987:219-225.