月面复杂地形表层采样可采点确定方法
2019-05-23
北京空间飞行器总体设计部,北京100094
地外天体表层土壤样品采集是人类获取地外天体特性,探索宇宙起源及演化的重要手段。美国月球勘查者任务(如Surveyor),火星探测任务(如Phoenix、Curiosity),小行星探测任务(如OSIRIS-Rex)均采用了表层采样进行科学探测[1-5],欧空局猎兔犬2(Beagle 2)火星着陆器配置了4自由度表层采样机械臂获取火星表面基础数据[6]。俄罗斯福布斯(Phobos Grunt)采样返回任务配置了机械臂,完成火卫一表层土壤的获取[7-8]。中国探月工程已成功实现了月球环绕探测、月面软着陆与巡视探测,嫦娥三号巡视器利用机械臂携带X射线谱仪对月球表面进行了原位探测[9-10],提升了对月球表面土壤的认识,按照绕、落、回三步走发展思路[11]正在开展“回”的相关研究工作,对月球表面浅表层土壤实施多点采样,进行原位探测和返回分析,将极大提升工程任务的科学回报。
月球是人类认识宇宙的重要目标之一,月球表面由不同大小的环形坑、高地、月海覆盖,随着人类对月球观测和探测活动的不断深入,对月面地形的认识也不断提升。人们对探测器着陆过程、移动巡视过程均有较为深入的影响分析,但对采样活动的影响分析相对较少。对采样任务而言,当着陆器或巡视器处于某个特定位置时,受平台构型布局、表层采样装置可展长度等约束,采样区域通常局限在着陆器或巡视器当前位置附近很小的一个区域,如凤凰号铲挖扇形区域半径仅约2.14 m[2],表层采样装置对区域内各(离散)点的可达性分析易于实现。目前国外已实施任务多采用尺度较小的采样器[12],而对于具有较强时间约束的采样返回任务往往希望单次采样量尽可能多,导致采样器尺度不可避免地增加。当较大尺度的采样器向目标采样点运动时,采样器不能简单地看作质点,在尚未到达目标采样点前,区域内的岩块、凹坑或倾斜面就可能与采样器或表层采样装置的某个部位发生干涉。采样器的尺度越大,形状越复杂,这种影响也就越明显。
针对一类采用较大尺度表层采样器的月球表层采样任务,本文结合月面复杂地形影响分析了表层采样过程,提出了月壤样品采集可实施的充分条件,通过可视区地形数据处理构建了适用于并行计算的可采点确定方法,并进行了仿真验证。
1 可采充分条件
我国正在开展探月三期采样返回任务研究工作,表层采样是一种重要的样品获取手段。表层采样通常为机械臂与采样器相结合的形式,在机械臂与采样器之间增加接触圆盘可实现采样器与土壤相对位置的感知。表层采样过程主要经历停泊、接触、铲挖3个状态,如图1所示。
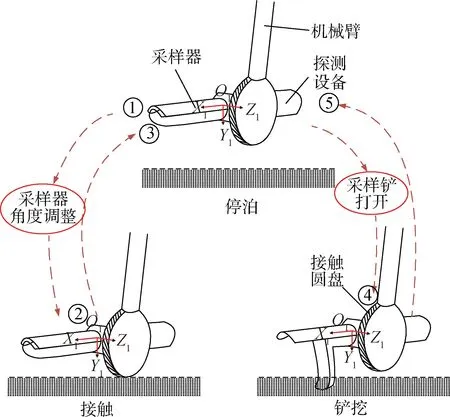
图1 表层采样主要状态示意Fig.1 Surface sampling typical state
根据选定的目标点,机械臂进行路径规划[13],携带采样器运动至目标点上方,进入停泊状态,通过立体相机与采样装置臂载相机图像数据,对目标点进行精细分析;确认满足采样与安全要求后,调整采样器角度,机械臂与采样器向土壤表面运动,直至圆盘与土壤相互接触,通过机械臂各关节电流、圆盘与土壤接触痕迹可分析表层土壤特性,为铲挖采样轨迹制定提供依据;其后,采样器返回停泊位置,并打开采样铲,在机械臂臂带动下运动至铲挖位置,随后通过铲挖方式进行土壤样品采集;采集完成后,采样器在机械臂带动下返回停泊位置,并将样品转移至科学分析仪器或样品返回容器中。
在不考虑采样点月壤密实状态影响及科学价值评估的情况下,对于如图1所示完全平坦的表层采样区域,确保接触点可到达,就具备了实施表层采样的条件,通过合理选择铲挖深度可获取样品。然而对具有较大尺度的采样器在复杂地形下完成采样则有所差异,如图2所示,从停泊向接触状态转换过程中,轻质、长臂展采样装置存在一定的定位精度误差,采样器可能向岩块方向漂移,发生局部碰撞。其次,采样区具有一定的坡度,采样器轴线(探测设备指向采样器方向,如图1中采样器坐标系O1X1方向)与倾斜面形成一定的夹角,当备选点坡度加大,而采样器轴线方向若维持不变,采样器前端则可能与土壤发生接触,采样铲转动轴与土壤表面的距离也变得不确定,给铲挖深度的确定也带来了困难。此外,从图2可以看到,凹坑的出现将降低采样量,而随着凹坑直径、深度的增大,采样铲无法与土壤接触,不能获取样品;当凹坑直径小于采样器长度,而深度大于接触圆盘半径时,采样器将与坑沿接触、接触圆盘悬空也无法采样。可见,复杂地形下采样区域中的岩块、倾斜面、凹坑给表层采样带来了一定的安全风险,增加了合理铲挖深度的确定难度。
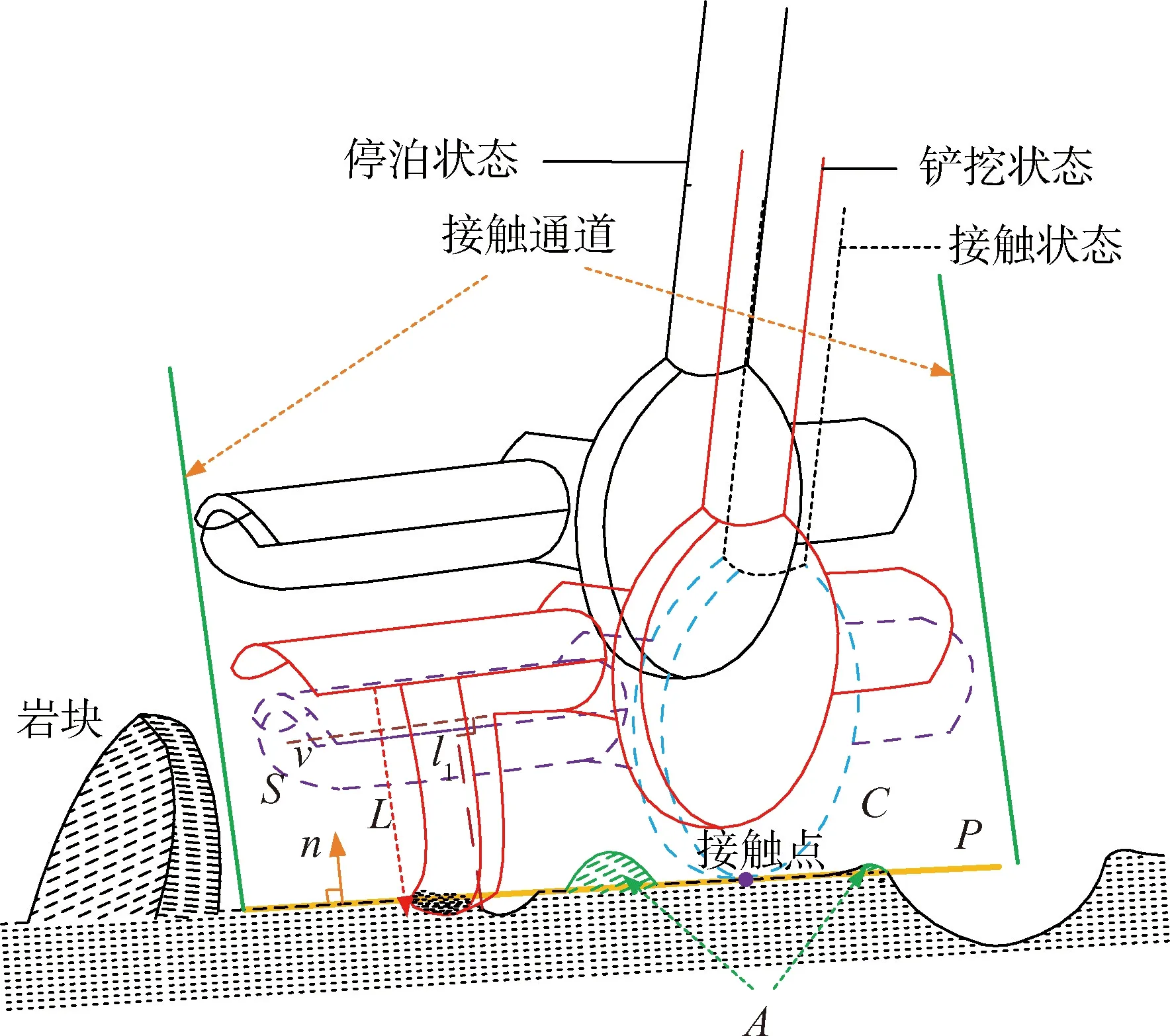
图2 复杂地形下表取停泊、接触、铲挖示意Fig.2 Surface sampling rest, touch and trench state under uneven terrain
从图2可见,若保证采样器与备选点邻近区域处于平行状态,可避免二者夹角带来的不确定性, 从而使问题简化。设备选点(x,y,z)为表层采样装置可达空间Ω中的点,采样器上各点的集合为S,采样器轴线方向矢量为v,接触圆盘柱面上各点的集合(如图1所示阴影区域)为C,地形在备选点邻近区域的拟合平面为P(如图2所示),备选点处法向量为n,接触通道内、平面P之上的地形点集合记为A,采样铲转动轴(如图1中采样器坐标系O1Z1方向)与当地地形的垂直距离为l,采样铲长度为L,则针对备选点实施表层采样的充分条件为:
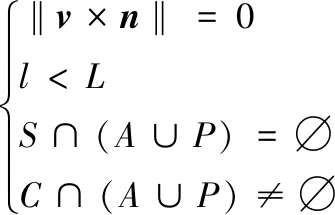
在不考虑采样点月壤密实状态影响及科学价值评估情况下(后文均在该约束下),备选点(x,y,z)满足式(1)时,称该点为可采点。对于可采点,采样器从停泊状态向接触状态转换始终在接触通道内运动,接触圆盘与地形的接触点位于可达区域内,采样器其余部位不会与地形发生碰撞,铲挖状态下采样铲可与土壤发生相互作用。
2 可视区地形处理
要确定可采点,首先需获得采样区域的地形数据,并进行相应的处理;从已实施的地外天体采样任务来看,为提高任务的可视性,各探测器均配置了立体相机辅助实施采样。立体相机图像重构的采样区精细三维地形是确认表层采样实施是否具备条件的前提,该地形区域简称可视区。
由于表层采样装置安装布局、运动特性、臂展长度等约束,可视区地形数据并不完全处于可达空间Ω内,可视区地形处理首先可以对可视区与可达空间取交集,确保可采点既可达又可视。然而对面积4~6 m2的采样区域,高分辨率图像生成的地形数据也将达到几百万个,若对各个数据进行逐一分析确定,计算量十分巨大,确定时间难以满足应用要求。从图2可见,采样器虽具有一定的尺寸,但在停泊、接触、铲挖过程中,起影响的仍为局部地形,从式(1)可见与地形相关的A、P均为备选点(x,y,z)空间邻域的子集,n是局部区域A∪P的法向量,因此可采点确定过程中仅需考虑各点邻近区域的地形数据,并非立体相机重建的整个可视区。因此,对立体相机图像重建的可视区,可按一定的方式分区,如图3中按立体相机光轴方向,以一定的区域宽度分区为1,2,…,ns,每个区域的宽度应大于采样器的包络尺寸。通过对可视区的合理分区,数据搜索范围将大幅下降,可视区的分区解耦也使得并行计算变得可能。
可视区地形生成后,地形分区内各点的局部法向量完全确定,从式(1)可知其对可采点确定过程有重要影响。重构地形由离散的点构成,备选点在各向的起伏情况存在一定的差异,可采用局部各向平均法向量近似局部法向量。如图3所示,针对分区3中备选点O,设A∪P为半径r1的冠状区域,ui、vi分别为以O点为起点、冠状区内点云点为终点的矢量,ui与vi间夹角为α(以ui为起始)满足约束:
(2)
式中:ε为小角度容差。设冠状区内满足式(2)的向量对数目为m,参考系垂直纸面向上为正向,则O点局部各向平均法向量no为:
(3)
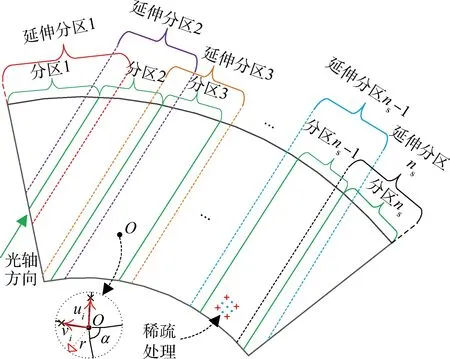
图3 可视区分区示意Fig.3 Subarea on visual area
由于采用分区解耦方式,相对于整个可视区地形,各分区的边界点可能存在向量对遗漏的情况,因此在分区的基础上引入延伸分区划分,对各分区边界进行重叠覆盖,如图3所示,延伸分区1进入分区2,延伸分区2则进入分区1,备选点以分区为边界,冠状区则以延伸分区为边界,避免分区解耦导致的计算向量对不全问题。
各分区点云数据的多少直接影响可采点确认工作量的大小,合理选择点云数据是重要手段。对平坦区域、小角度倾斜面区域内的密集点云点,相邻点间的可达、干涉等情况差异很小,存在一定的冗余,可通过适当的判定准则进行稀疏处理。相邻地形点的局部各向平均法向量可在一定程度上反映地形起伏变化,可对分区内点云数据进行合理分类,当距离不大于d的相邻点OA、OB的法向量夹角小于变化角δ时,即:
(4)
则认为OA与OB为同类地形点,通过搜索计算不断扩张同类点,可对分区内全部地形点进行分类,如图3中稀疏处理示意当邻近的多个备选点均满足式(4)时,一种简单的处理方法是去除中间间隔点,只保留4个角点,采用类似方法可对各分区内同类地形数据进行稀疏,实现点云数据量的有效缩减。
可视区数据分区与延伸为并行计算创造了条件,一定程度上实现了可视区数据的解耦,确保了局部各向平均法向量计算的完整性,为可视区数据稀疏提供了依据。
3 可采点确定方法
从前面分析可知,可采点确定过程是对可视区地形中各点按表层采样充分条件进行遍历分析的过程。通过前面的可视区地形处理,点云数据实现了合理精简,可采点确定过程可沿用可视区分区与延伸分区划分,进行并行分析与确认。
目前地外天体表层采样装置的机械臂主要为平行结构[2-4],针对该类采样机械臂,对选定的备选点,设采样器方向矢量v=[sx,sy,sz] (在参考系中),在采样器与机械臂连接轴方向的分量sz已由机械臂运动学完全确定,根据式(1)可采点充分条件,可知采样器方向与局部法向量垂直,考虑到地形处理过程中可获得局部各向平均法向量no=[nx,ny,nz](在参考系中),则采样器方向矢量可在该过程中同步获取,即:
(5)
采样器要到达可视区中的备选点(x,y,z|v),机械臂至少应具有4个自由度。根据机械臂逆运动学可计算各关节变量,确定采样机械臂构型状态,因此采样器与地形的垂直距离l、采样器点集S、接触圆盘点集C均完全确定,而从前面地形处理可知,局部区域A∪P也已确定。可见,可采点确定工作主要集中在采样器点集与局部地形点集相交为空、接触圆盘点集与局部地形点集相交非空两个方面。
采样器、臂杆末端由大量的空间点构成,判断其与局部地形碰撞情况,可通过选择合适的检查基点,对基点进行球形包覆,实现对整个采样器、臂杆末端空间点的覆盖,将大量的空间点转化为少量的检查基点及包覆半径。设臂杆末端、采样器检查基点组成集合S1,球形包覆半径为r2(可包含安全距离),采样器、臂杆末端包覆状态如图4所示(接触圆盘不作包覆),确保对臂杆末端、采样器的全包覆,形成扩张点集S2, 则有S1⊂S⊂S2。只要确保局部地形点不进入以S1为基点扩展而成的S2内,则可保证采样器点集与局部地形点集不相交,即:
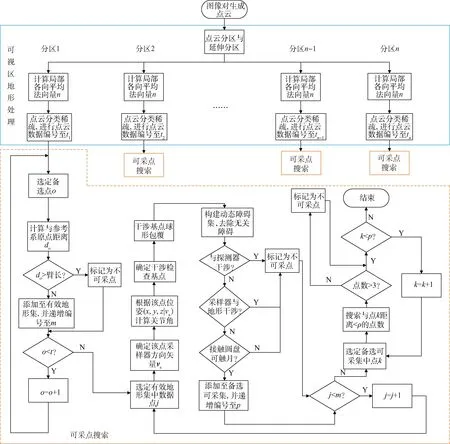
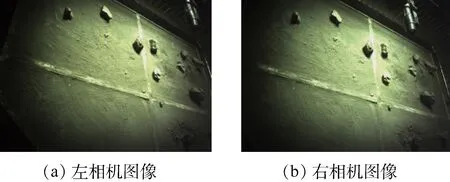
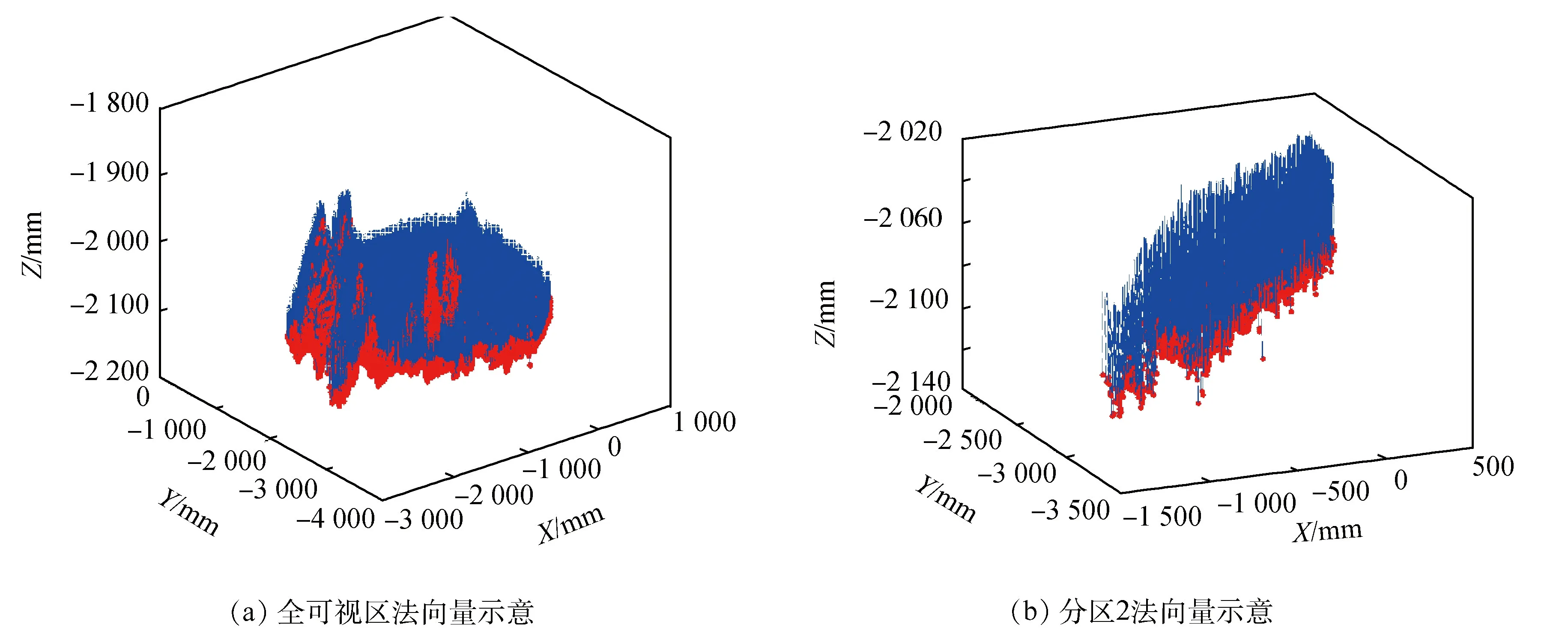
‖gk-sj‖ 对选定的备选点,若接触圆盘下方为平坦区域,通过调整式(6)中的r2可进行接触状态分析,即接触圆盘与局部地形相交。然而由于地形的复杂性,不同地形下接触点在接触圆盘上的位置并不相同,接触圆盘下半周区域均存在可能,而点云数据构成的地形点为离散点,接触状态实际存在地形点恰与圆盘边缘贴合的临界接触、部分地形点进入圆盘内过接触两种子状态。 图4 采样器欠接触状态示意Fig.4 Sampler with less touch 为简化接触状态区分策略,在备选点沿地形法向量方向进行上移(△x,△y,△z),使接触圆盘处于如图4所示欠接触状态。在接触圆盘外沿q个选择基点、采样器下底面p个选择基点组成集合J,并进行球形扩展(半径为r3>(△x2+△y2+△z2)1/2),搜索包覆球内地形点与基点的最小距离,当满足: (7) 则接触圆盘与地形可接触(接触圆盘点集与局部地形点集的交集非空)。 对复杂月面地形实施表层采样前,根据前面可视区地形处理工作,进行合理的分区、延伸、稀疏处理,对处理后的三维地形数据分区实施可采点搜索,形成备选可采集,并对孤立点进行清理可进一步提高安全性,获得表层采样可采集,其确定流程如图5所示。为提高可采点确定的工作效率,整个过程采用并行方式开展,因此分区数量n应结合采样器尺寸、计算机多核处理器数量综合选取。 为验证本文提出方法的正确性,利用如图6所示采样区域图像对进行三维重构[15],整个可视区域重构地形面积约4.8 m2,点云点约281万个,以文献[14]所述安装及构型参数的表层采样机械臂为例,在普通双核计算机上采用Matlab确定该区域内的可采点。 根据前面分区与延伸分析方法,将点云数据沿相机光轴方向分割为10个分区,延伸分区在分区基础上向两边各进行约1/5宽度的扩展,如图7所示为分区、延伸分区在参考系XY平面的投影,实际为空间划分,包含不同高程(Z坐标)的点云点。 仿真中设定局部各向平均法向量容差角度ε=2°、分类稀疏距离d=10 cm、变化角δ=5°、球形包覆半径r2=3 cm,r3=12 cm,经分区并行仿真可得局部各向平均法向量如图8所示。 图8中红色点表示可视区离散点云点,蓝色线条表示法向量,从图中可见法向量与Z轴为小角度,与设置的2°容差角度相符。根据局部各向平均法向量对点云数据进行稀疏处理,稀疏后的点云数据量为44 325个,结合4自由度机械臂运动逆运动学约束,通过基点覆盖检测完成可采点搜索,可采点分布如图9所示。 图5 可采点确定流程Fig.5 Flow chart of establishing adoptable point algorithm 从图9中可见,可采点主要分布在相对平坦区域,避开了如图6中的岩块附近区域、凹坑区域,在双目立体相机的可视区与表取采样装置的可达区中正确实现了可采点搜索。仿真过程中随并行计算核心数量nc的增加,可采点确定时间显著降低,当nc≤10时,耗时与核心数关系近似为12/nc小时,可见分区并行计算可有效提升可采点确定的工作效率。 图6 采样区图像对Fig.6 Image pair of sampling area 图7 分区与延伸分区在XY坐标平面投影Fig.7 Projection of subarea and extended subarea on XY plane 图8 局部各向平均法向量示意Fig.8 Graphic of local average normal vector 图9 可采点分布示意Fig.9 Distribution map of adoptable point 1)对采用较大尺度采样器的月球表层采样任务,复杂地形对表层采样的策略制定、操作难度、产品安全都将带来影响,对采样区域内各处的月壤可采性的研究是表层采样实施前必须开展的一项工作。 2)表层采样可采的充分条件包含了可达性与安全性两方面的约束,通过引入局部平均法向量实现了地形数据的合理稀疏,通过选择采样器、接触圆盘检查基点并进行球形扩展,实现了集合关系运算的数值化,仿真示例中用于可采点确定的地形点从整个可视区的约280万下降至分析中的约4.5万,可采点确定效率显著提高,效率提升情况与地形的平坦程度有一定的关系。 3)通过对地形数据的分区与延伸,实现了地形数据的分区解耦,为并行计算创造了条件,可采点确定的效率进一步提升。 本文的月壤可采充分条件未考虑采样区域内各点样品对月球起源及演化等相关科学价值差异,对各可采点的安全程度未进行比较,在采样点选择的优先级方面还需进行优化。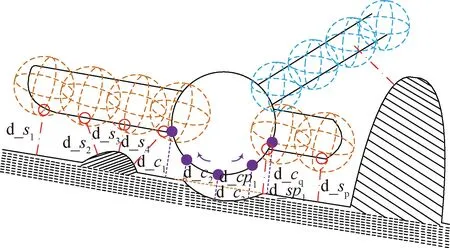
4 仿真验证

5 结束语
