立体车库升降传输装置的设计
2019-05-16夏雨时孙立巍尚青鹏张永伟
夏雨时,丁 颂,孙立巍,尚青鹏,张永伟
(长春师范大学工程学院,吉林长春 130032)
0 引言
随着互联网时代的到来和科技不断进步,汽车行业得到飞速发展,停车难的问题也随之而来。在老旧小区以及城市生活中,机动车乱停放的现象普遍存在,因此立体车库得到了应用和推广。目前市面上的车库大多需要人工管理,且存取车效率低。为此,需设计一种高效率存取车的立体车库。通过对立体车库的研究,基于慧鱼模型设计了一种升降传输装置。该装置通过程序控制齿轮齿条、丝杠螺母机构的运动,达到高效存取车的目的。
1 升降传输装置设计
升降传输装置由连接块、光杠、齿轮、步进电机、承载板、丝杠和螺母组成(图1)。光杠设计增加了装置的稳定性,将丝杠固定在光杠之间可节省空间,增加空间利用率。承载板由连接块固定,螺母通过连接块的中心位置与丝杠相连。步进电机通过齿轮的啮合将动力传递给丝杠螺母传动机构。当有车辆需要停放时,车辆承载板移至下层,车辆在丝杠螺母传动机构的作用下上升至上层,实现存车目的。

图1 升降传输装置
对整个升降传输装置进行受力分析。在整个装置中,受力的构件分别为丝杠、螺母、承载板、外力为车辆的自重。升降传输装置分为A,B,C 3个传输装置。3个装置中,丝杠与螺母之间的摩擦力为f,承载板受到3个装置的推力分别为FN1,FN2,FN3、自重为G1,支持力为FN、车辆的自重为G2。3个装置的受力相同,以A装置进行受力分析。
承载板上升时,向上的驱动力F=FN+FN1-f-G1-G2。取动摩擦系数为 μ=0.4。为使其受力平衡,FN≥G1+G2,FN1>μFN1,由牛顿第二定律可得 FN+FN1-f-G1-G2=ma>0,即 a>0(a为加速度),承载板向上做匀加速直线运动。承载板下降时,向下的驱动力F=G1+G2-FN-FN1-fG1+G2-FN-FN1-f=ma<0,即 a<0。承载板向下做匀减速直线运动。
在车辆承载板材料的选择方面,需要对升降传输装置及承载板进行总体强度校核。整个升降传输装置和承载板构成的整体可近似的看成悬臂梁结构。现将小型轿车的自重等效为均布载荷q,升降传输装置等效为固定端,承载板等效为悬臂梁,悬臂梁与固定端的连接处记为A。由分析可知,悬臂梁的固定端约束了端截面的移动和转动,所以有铅垂方向约束力FA和约束力偶MA。由平衡方程∑Fy=0和∑MA=0可得,FA=ql,MA=ql2/2。等效后的剪力图如图2所示,等效后的弯矩图见图3。
小型轿车自重力约1.2×107N,承载板的面积A=5 m2。钢材的许用应力[σ]=10 MPa。则承载板的应力σ=FN/A=2.4 MPa<10 MPa。
由上述分析可知,承载板的强度符合设计要求,材料为钢材。

图2 等效后剪力
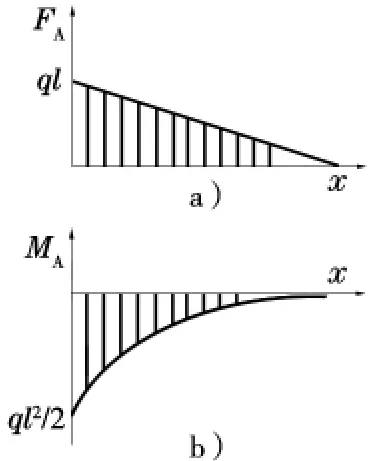
图3 等效后弯矩
2 基于慧鱼模型的车库传动机构设计
基于慧鱼模型设计了齿轮齿条传动机构和丝杠螺母传动机构。齿轮齿条传动机构由导轨、齿条、支撑块、固定支撑组成,齿条、支撑块、固定支撑可由慧鱼零件搭接(图4)。在整个传动机构中电机起着传递动力的作用。现对齿轮齿条传输电机进行选择。
根据测得的数据可知,车库底层和顶层的高度h=0.3 m。车位由底层上升至顶层所用的时间约为6 s。则齿条升降速度v1=h/t=0.05 m/s。

图4 齿轮齿条传动机构
车位在下降时,齿轮齿条传动机构所受的力分别为承载板和汽车的自重,齿条与导轨间的摩擦力。测得承载板与模拟汽车的重量为3 kg。取动摩擦因数μ=0.4。则升降传输电机的功率P1=Fv1=(G-f),v=0.9 kW。
根据以上分析,选择型号为28BYJ-12 V的步进电机作为齿轮齿条传动机构的传输电机。该电机的最大输出功率为1.5 kW,最大转速为7689 r/min。
丝杠螺母传动机构主要由连接块、光杆、丝杠以及螺母组成。丝杠螺母传动机构的动力由传输电机提供,现对丝杠螺母传输电机进行选择(图1)。
测得丝杠转过的路程s=0.34 m。车位由底层上升至顶层所用时间约8 s。则丝杠旋转速度v2=s/t=0.042 5 m/s。
承载板与模拟汽车的重量为3 kg。取动摩擦因数μ=0.4。丝杠与螺母之间的摩擦力记为f。则用于丝杠螺母传动系统的电机的功率P2=fv2=0.51 kW。
通过计算可知:选择9 V的步进电机作为丝杠螺母传动机构的传输电机。该电机的最大输出功率为0.9 kW。最大转速为5665 r/min。且具有正反转功能,故满足设计要求。
现对基于慧鱼模型设计的2种机械传动机构进行实验,具体结果如表1所示。
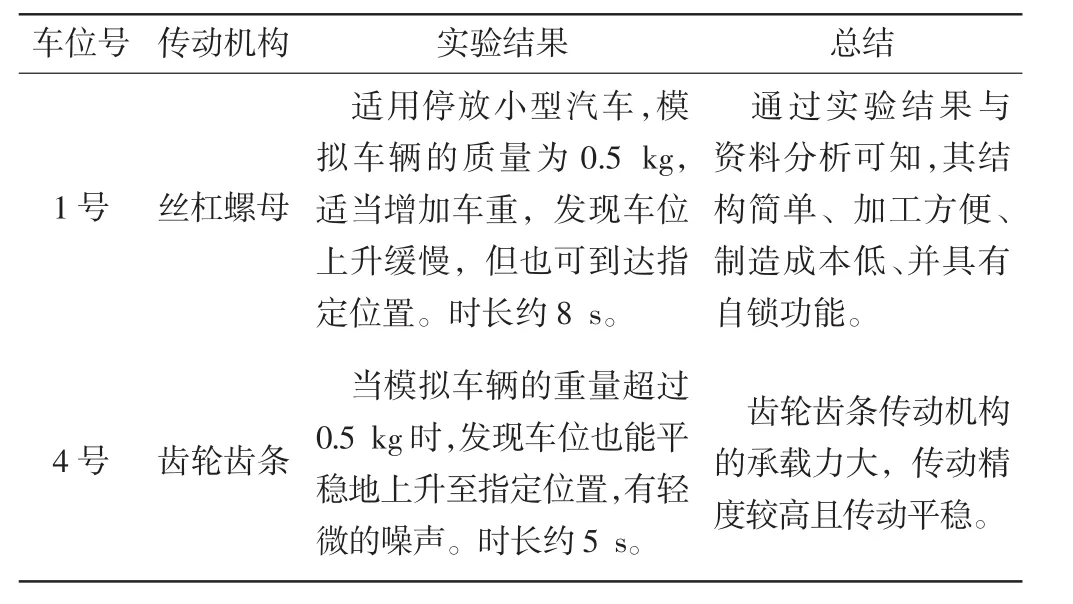
表1 2种传动方案对比实验
通过实验对比齿轮齿条和丝杠螺母传动机构。丝杠螺母机构具有自锁功能,防止电机停转或突然断电给整个系统带来安全隐患。因此,选择丝杠螺母机构作为升降传输装置的传动机构。
3 车库升降传输装置控制系统的设计
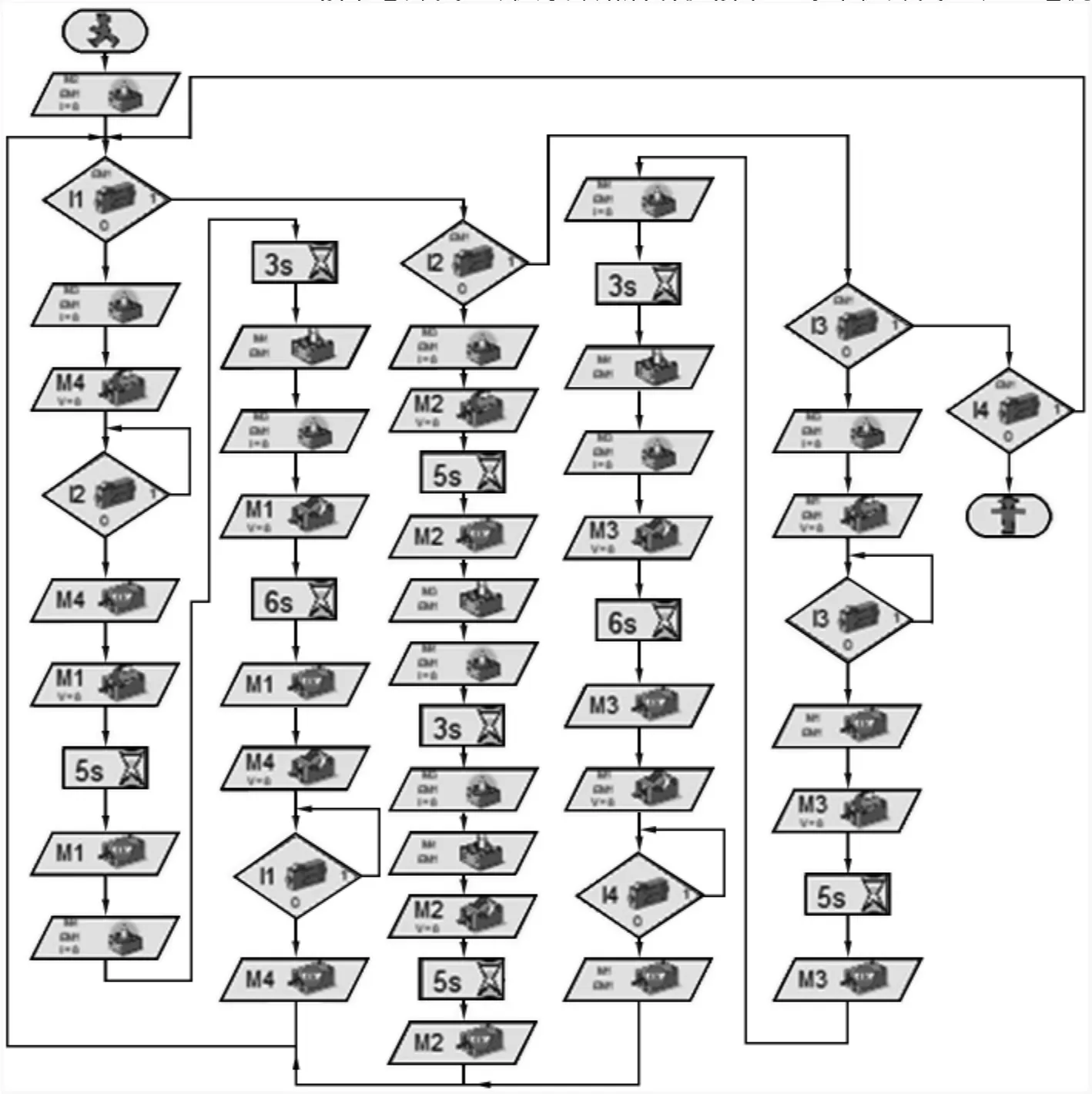
图5 程序控制流程
升降传输装置控制系统包括对车位的竖直与水平运动的控制,利用ROBO Pro编程软件编写程序。M1,M2和M3为升降传输装置所用的电机,I1为程序总开关,I2,I3和I4分别为3号、4号、5号车位的控制开关。以存车为例。车主将车停在承载板上,按下总开关I1,程序开始启动。按下3号车位开关I2,M2电机开始正转,大约5 s后M2电机停转,车位上升至指定位置,存车完成。取车时,车主按下3号车位开关I2,M2电机反转,经过5 s后车位下降至地面,完成取车过程。通过延时程序控制M2电机正转,车位上升至指定位置,为下层车位留出空间,方便下一辆车的停放。具体程序控制流程如图5所示。
4 结语
针对目前车库存取车效率低、稳定性差等问题,基于慧鱼模型设计了一种立体车库升降传输装置。该装置主要由丝杠螺母、承载板和步进电机组成,通过丝杠螺母传动机构的运动来进行车位的升降,通过程序控制电机的转速达到高效率存取车的目的。同时融合了机电一体化技术。该升降传输装置应用广泛,对未来立体车库的建设具有理论意义。
