变质心飞行器伺服机构模糊PI控制技术研究
2019-05-16丁伟涛贾淑绒赵国平
丁伟涛,杨 斌,贾淑绒,赵国平
(北京精密机电控制设备研究所,北京 100076)
0 引言
近年来,随着高超声速飞行器的发展,出现了一种新兴的控制技术——变质心控制技术,又称为质量矩控制技术。其基本原理是通过移动安装在飞行器内部的若干个质量块来改变飞行器系统的质心位置,利用由此产生的气动配平力矩改变飞行器的飞行速度和姿态,完成飞行器的飞行控制任务[1]。飞行器的控制执行机构是按照指令控制质量块移动的装置,也称作伺服机构。美、俄两大军事强国在变质心控制技术方面研究较为成熟,但是技术资料严格保密,公开的很少。
美国是最早从事变质心控制研究的国家之一。美国海军水面战研究中心的Regan和Kavetsky[2]设计出一种单自由度移动的变质心控制执行机构,能够在飞行器再入时进行姿态修正以提高落地精度;俄罗斯的白杨-M弹道导弹弹头已经成功地应用了变质心控制技术[3]。国内在这方面的跟踪研究较晚,但是也做了很多相关工作: 如周凤岐[4]利用小扰动方法对变质心控制机理进行了分析;高长生[5]对变质心飞行器进行了系统动力学分析。更多研究工作主要集中在变质心飞行器姿控系统设计方面,对于变质心伺服机构控制技术方面的研究较少。
飞行器变质心控制方式包括一维控制、二维控制和三维控制等,一维控制方式一般携带1个质量块,只能单自由度移动(图1),二维、三维控制方式需要携带2~3个质量块,能够实现飞行器质心的多维调节(图2)。质量块移动对飞行器的俯仰、偏航、滚转通道产生控制作用,从而完成对飞行器姿态的调节。
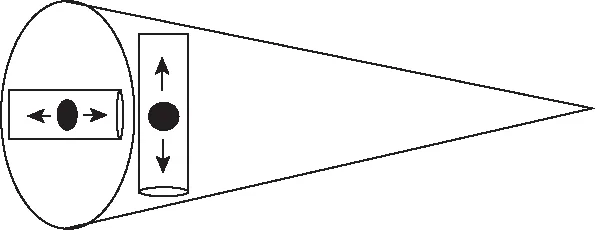
图2 二维变质心控制示意图Fig.2 Diagram of two-dimension moving mass control
本文结合飞行器变质心控制技术的发展需求,对某飞行器一维变质心伺服机构的伺服控制算法进行了研究,针对变质心伺服机构变工况负载的特点,提出了模糊PI控制方案,进行了建模仿真分析与实验研究。
1 变质心伺服机构分析与建模
在飞行器飞行过程中,X、Y、Z这3个方向均存在较大的过载加速度,由于可移动质量块质量较大,导致X、Y、Z这3个方向均存在较大的过载力。X、Y向过载力主要作用于支撑导轨,Z向过载力需要质心调节机构自身提供的控制力克服。如何在大过载条件下实现质量块的高动态快响应运动控制,是变质心伺服机构控制的主要难点。
如图3所示,在顺载工况下,Z向过载力与质量块运动方向相同,较大的过载力会推动质量块迅速移动,导致质量块运动速度过大,甚至与限位装置相撞,这种工况下伺服机构需要控制自身速度与超调。在逆载工况下,Z向过载力与质量块运动方向相反,伺服机构需要克服过载力的影响,同时保持质量块具有高速运动能力。这就对伺服控制算法提出了较高要求,要能够根据不同负载工况需求,提供适合的控制参数。
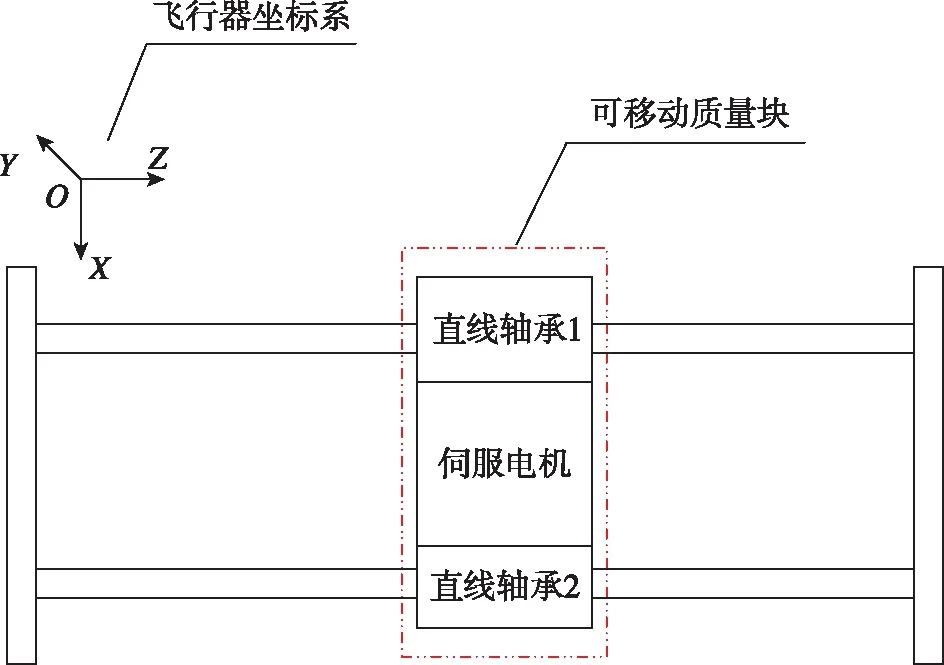
图3 质心调节机构示意图Fig.3 Diagram of moving centroid actuator
变质心伺服机构采用机电伺服方案。质心调节机构主要由永磁同步伺服电机和传动机构组成,负载为可移动质量块,下面分析永磁同步伺服电机和负载模型。
1.1 永磁同步伺服电机建模
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)是一个高阶、非线性、强耦合的多变量系统,其实际动态数学模型是一个高阶微分方程组。为了正确理解其控制方法,首先必须进行一定程度的技术处理,在不改变其特征的前提下忽略和简化次要矛盾,建立一个分析可用的数学模型。为此,作出理想三相PMSM假设如下:
1)定子三相绕组在空间对称分布,Y型连接;
2)气隙均匀,气隙磁密正弦分布,忽略其高次谐波分量;
3)磁饱和及铁心损耗(磁滞、涡流)忽略不计,磁路为线性;
4)转子与定子绕组之间的互感为位置角的正弦函数,转子上没有阻尼绕组,永磁体也没有阻尼作用;
5)不考虑温度、频率等变化对电机参数的影响。
根据以上假设,以凸装式永磁同步电机为例,连续采用Clarke变换、PARK变换,将三相静止坐标系uvw中的量(电压、电流、电感)变换到两相旋转坐标系dq0。假定交、直轴电感相等,PMSM数学模型的表达式可以化简为
(1)
式中,ud、uq为变换后的电机交、直轴电压,id、iq为变换后的电机交、直轴电流,Ra为定子每相绕组的电阻,ωm为转子机械角速度;Pm为电机的极对数;ψd、ψq为交、直轴磁链;L为等效交、直轴电感。
1.2 负载模型
伺服机构控制对象为可移动质量块,负载力主要包括惯性力、阻尼力和过载力,负载方程如下
(2)
式中,M为负载可移动质量;Lm为可移动质量块位移;B为阻尼系数;Ka为飞行器在Z向产生的过载加速度(FZ为Z向过载力,FZ=KaM)。
面向控制的机电伺服机构模型如图4所示。
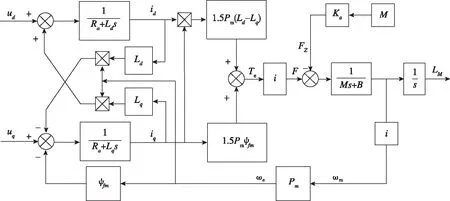
图4 面向控制的机电伺服机构模型Fig.4 Control-oriented model of electromechanical servo system
2 模糊PI控制算法研究
本文所研究的变质心伺服机构采用三闭环控制结构,电流环与速度环采用PI控制,位置环采用模糊PI控制。本文主要对位置环模糊PI控制算法进行研究。
传统PI控制传递函数为
G(s)=U(s)/E(s)=Kp(1+Ki1/s)
式中,Kp为比例系数;Ki为积分时间常数。
在PI控制器中,比例环节反映控制系统的偏差信号;积分环节主要用于消除静差,提高系统的无差度。
模糊控制是以模糊集合论、模糊语言变量及模糊逻辑推理为基础的一种数字控制方案。模糊控制系统由模糊控制器和对象组成,如图5所示。

图5 模糊控制系统示意图Fig.5 Diagram of fuzzy control system
模糊控制和PI控制相比,具有更快的响应和更小的超调,而且对负载工况的变化不敏感,具有很好的鲁棒性,能够克服非线性因素的影响。虽然模糊控制具有这些优良品质,但由于受到计算机存储量的限制,只能取得有限的控制级数,限制了模糊控制精度的提高。PI控制算法对大多数伺服控制都具有很好的控制效果和适应性,但一组固定的PI参数也很难适应系统的全过程,当控制对象的负载工况变化较大时,系统的性能必然会受到影响。
在设计控制方案时,考虑将PI算法和模糊算法有机结合,既利用前者的实用性,又结合后者的智能性。根据对伺服机构数学模型参数和工况的分析,在设计模糊推理时,采用Mamdani的形式,通过在线方式实时调节PI算法的2个参数。具体思路为:将一个常规PI控制器作为主控制器,另设计一个模糊推理模块,利用该模块对PI控制器的比例和积分2个参数进行自适应整定。
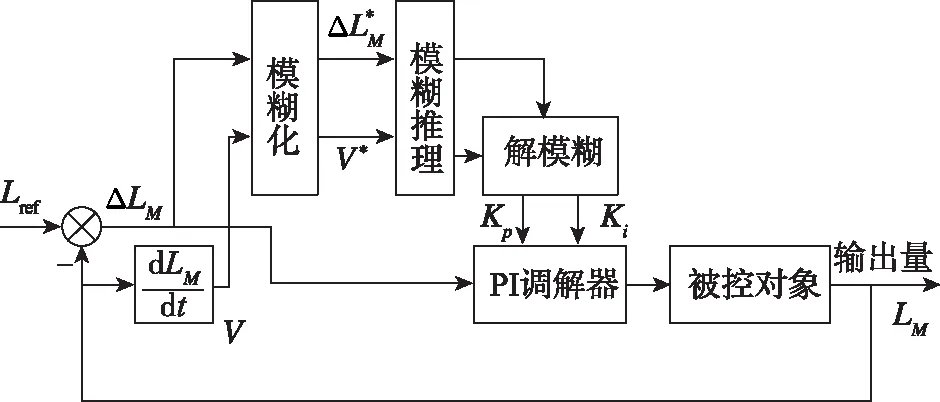
图6 PID参数自整定模糊控制器框图Fig.6 Structure of fuzzy controller withself-tuning PID parameters
模糊控制器的输入变量为ΔLm和V,输出变量为Kp和Ki。现将输入模糊语言变量ΔLm和V的模糊等级划分为七级,用自然语言表示即{NB, NM, NS, ZO,PS, PM, PB},输出模糊变量Kp模糊等级分为四级,用自然语言表示即{ S, M, B, H},输出模糊变量Ki模糊等级分为四级,用自然语言表示即{ZO, S, M, B},本文N、P、ZO、H、B、M和S分别表示negative、positive、zero、huge、big、middle和small。
推理规则如表1、表2所示。
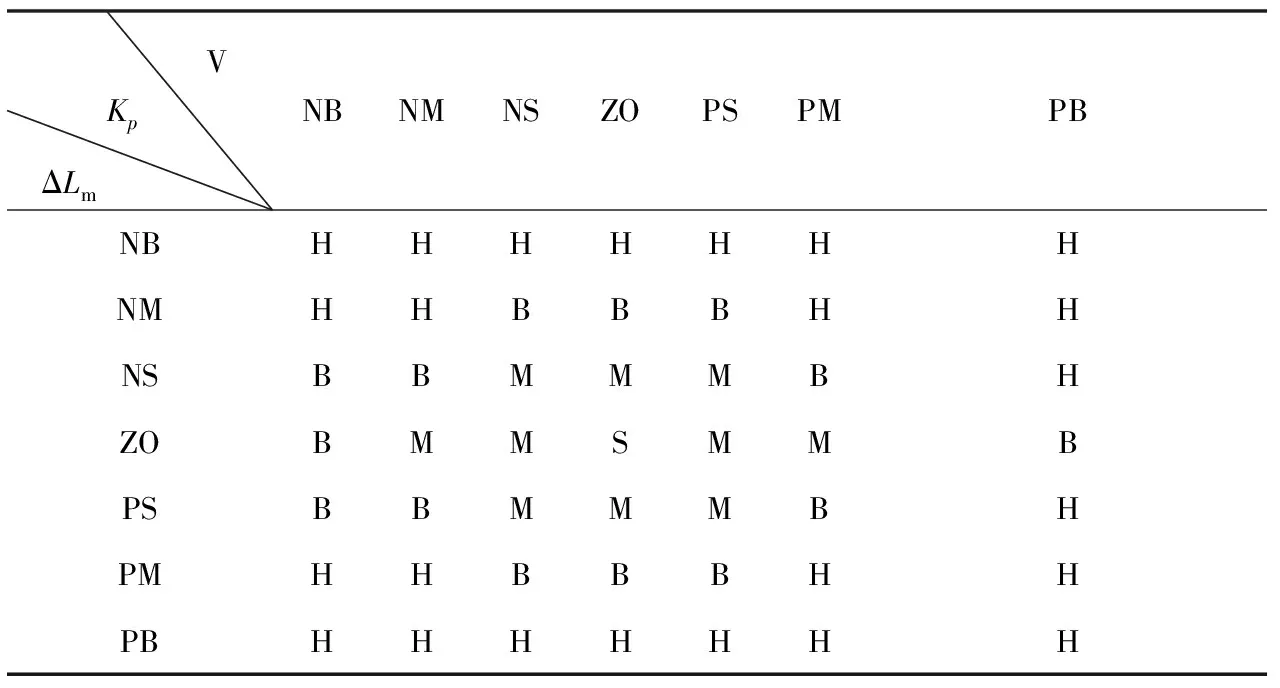
表1 模糊控制器1控制规则表
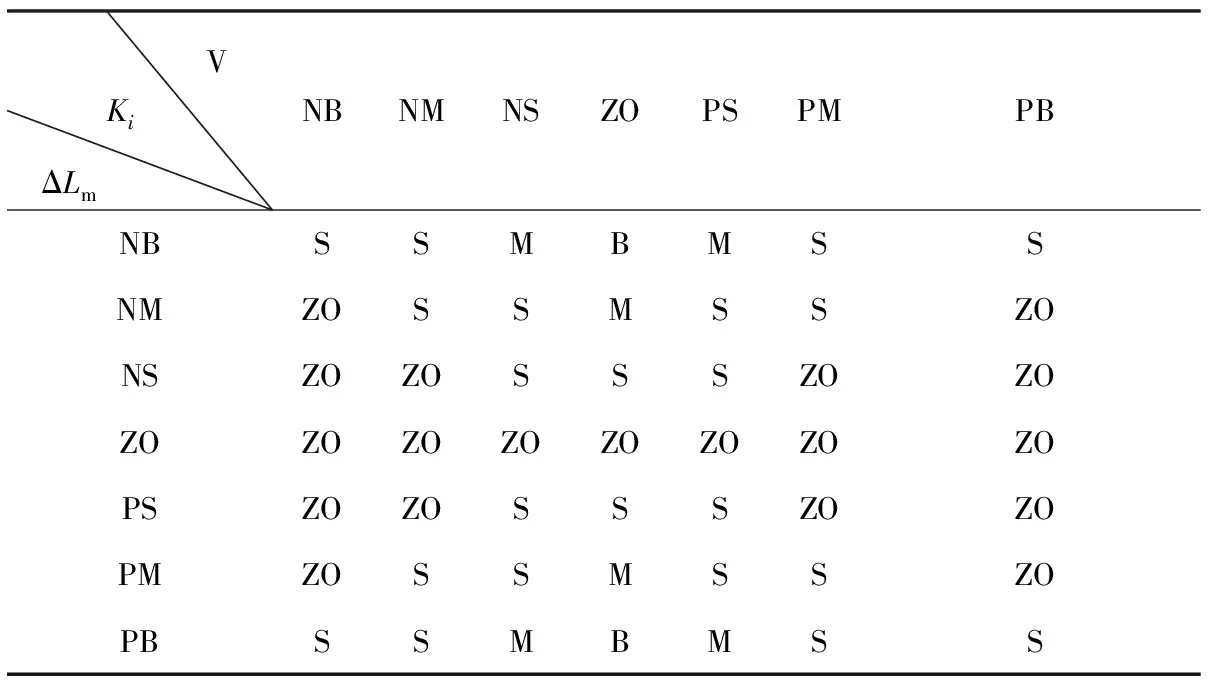
表2 模糊控制器2控制规则表
3 仿真与实验研究
以某飞行器变质心伺服机构为对象,进行了仿真分析与实验研究。
3.1 仿真分析
参照理想化的变质心伺服机构控制模型,运用Matlab建立机电伺服机构及负载仿真模型,对模糊PI控制器性能进行仿真分析。
图7所示为伺服机构的阶跃响应曲线,从仿真结果可以看出,模糊PI控制能够适应不同过载条件下的伺服控制需求。在大过载条件下,PI控制提供的控制力不足,在顺载工况下,容易产生较大超调;逆载工况下,伺服机构响应速度慢且存在一定静差。采用模糊PI控制能够适应不同工况下的伺服控制需求,改善伺服机构响应能力,且通过在线调整积分系数,能够有效消除静差。这表明,模糊PI控制适合于变质心伺服机构的控制。
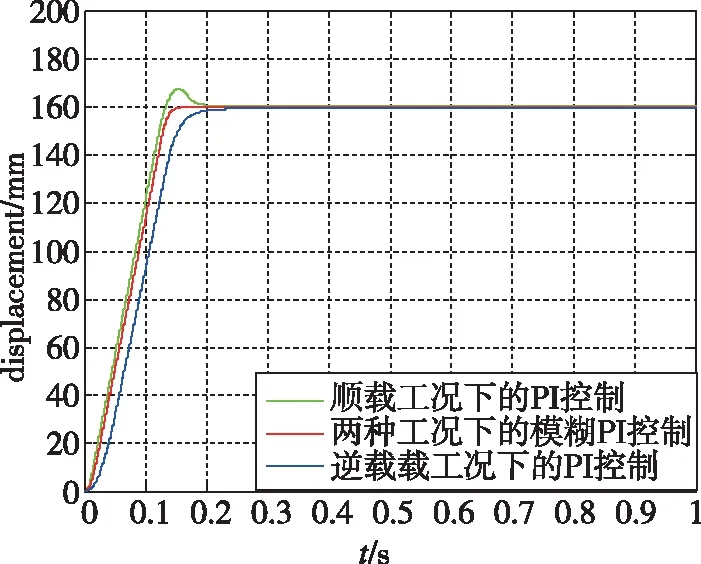
图7 伺服机构阶跃响应曲线Fig.7 Step response of servo actuator
3.2 实验研究
频率特性的测试按标准进行,测试信号幅值为20mm的正弦信号,输入频率1~200rad/s,测试结果如图8所示。
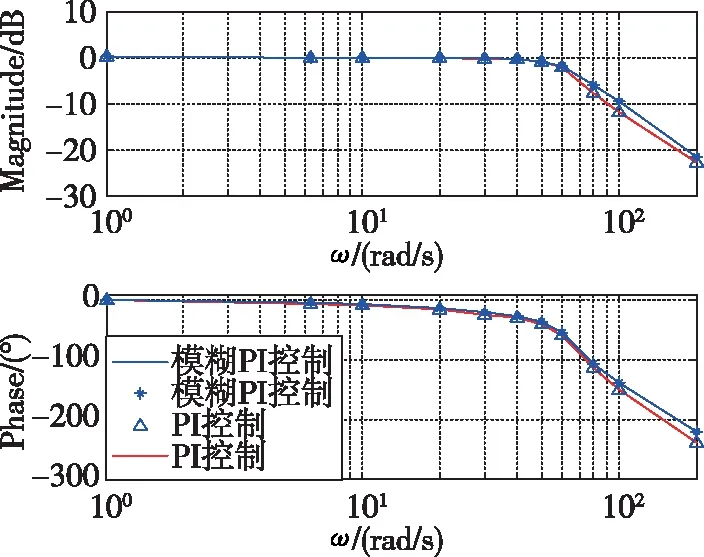
图8 系统频率特性测试结果Fig.8 Servo actuator’s frequency test result
对实验结果的分析可以得出,模糊PI控制器的确有提高系统响应速度的能力。从图8中可以很明显地看出,系统通频带在模糊PI控制下展宽了,系统没有明显的谐振,这就意味着系统没有超调。当信号频率为ω=69rad/s时,幅值为-3dB,所以系统的带宽约为11Hz。
4 结论
本文针对可移动质量块质量大、动态响应要求高、力学环境过载大的变质心伺服机构控制问题进行了研究,提出了一种集成了PI控制与模糊控制各自优点的模糊PI控制算法,为变质心伺服机构控制问题提供了一条可实现的解决途径。主要内容为以下几点:
1)建立了面向控制的变质心伺服机构及负载数学模型;
2)将PI控制与模糊控制相结合,设计了模糊PI控制器,可以根据伺服机构的实际工况,采用Fuzzy推理方法对PI控制参数进行在线自调整;
3)通过仿真分析及实验研究对模糊PI控制器性能进行了验证,结果表明:所设计的模糊PI控制器在不同工况下均可以很好地实现控制,伺服机构具有较快的响应能力和较高的控制精度,同时具有较强的鲁棒性。
在后续工作中,将会对模糊PI控制参数进行不断优化,进一步提高变质心伺服机构控制性能,提升飞行器的机动能力。
