GNSS卫星钟差估计与结果分析
2019-05-16李浩军
叶 珍,李浩军
(同济大学测绘与地理信息学院,上海 200092)
0 引言
精密单点定位[1-4](Precise Point Positioning,PPP)技术具有定位精度高,数据采集方便,数据处理简单,不受观测时间、观测距离限制等优点,成为近年来精密定位服务的重要手段。其中,卫星钟差对定位精度的影响尤为重要,其精度及稳定性直接影响到PPP解算的最终结果。目前,国际GNSS服务组织(International GNSS Service,IGS)及其分析中心可提供30s、5min、15min采样间隔的钟差产品,其精度已优于0.1ns[5],可以满足高精度用户的事后定位需求。国内外学者对卫星钟差估计[6-7]进行了大量的研究,并且提出了具有较高精度的钟差估计方法,主要包括非差模式[8-10]和历元间差分模式[11]。历元间差分模式可消除模糊度参数,减少待估参数个数,提高数据处理速度,但初始时刻卫星钟差会引入与卫星相关的偏差。文献[12]提出了利用历元间差分相位观测值和非差伪距观测值并行计算的方法,旨在消除该项偏差的影响。非差模式卫星钟差估计方法待估参数过多,计算速度较慢,但非差模式顾及各项误差改正,可以得到较高的精度。文献[13]利用非差载波相位观测值进行事后精密卫星钟差解算,与IGS最终精密钟差产品符合较好,互差优于亚纳秒级。
全球导航卫星系统[14-15](Global Navigation Sate-llite System,GNSS)发展迅速,除了美国的全球定位系统(Global Positioning System,GPS),还包括俄罗斯的全球卫星导航系统(Global Navigation Satellite System,GLONASS)、欧洲的Galileo,以及中国的北斗卫星导航系统[16-17](BeiDou Navigation Satellite System,BDS)。随着全球一体化的进展,以及各导航系统的逐步应用实施,未来是一个全球卫星导航系统的多系统融合时代,多系统组合定位能够增加可观测卫星数、优化卫星的集合图形结构以及提高多系统组合定位精度与可靠性[18-19]。本文介绍了基于非差观测量的GNSS卫星钟差估计算法和数据处理过程,分别解算得到GPS、GLONASS、Galileo和BDS多系统卫星钟差产品,并分析了该产品的精度与定位性能。
1 GNSS卫星钟差估计
在卫星钟差估计中,一般采用无电离层影响的非差相位和伪距观测值[20],其中,GPS与BDS的观测值方程为:
LG,j=ρG,j+cδG+cδG,j+λG·NG+TG+εG(ΦIF)
(1)
PG,j=ρG,j+cδG+cδG,j+TG+ωG(PIF)
(2)
LC,j=ρC,j+cδC+cδC,j+λC·NC+
TC+ISB+εC(ΦIF)
(3)
PC,j=ρC,j+cδC+cδC,j+TC+ISB+ωC(PIF)
(4)
式中,上标G、C分别代表GPS与BDS;Lj、Pj为卫星j对应的无电离层影响的相位与伪距观测值;ρj为卫星与接收机之间的几何距离;c为光速;δ为接收机钟差,δj为卫星钟差;λ为波长;N为整周模糊度参数;T为对流层延迟;ε(ΦIF)、ω(PIF)分别为相位、伪距观测值的其他误差项。
其中ISB为系统间偏差[21-22],由不同基准产生,表达式如下
ISB=(refC-refG)+(bC-bG)
(5)
式中,refC、bC为BDS下无电离层组合的载波相位硬件延迟与码硬件延迟;refG、bG为GPS下无电离层组合的载波相位硬件延迟与码硬件延迟。
利用由上述公式建立的观测方程,采用最小二乘方法来解算事后卫星钟差、接收机钟差及载波相位模糊度等参数。在未发生周跳或周跳已经修复的情况下,整周未知数当作常数处理,在发生周跳的情况下,整周未知数当作一个新的参数进行估计;观测数据时间间隔为30s,设置卫星截止高度角为7°;天线相位中心变化采用绝对天线相位中心(IGS08)模型;对潮汐影响、相对论效应、地球自转等采用模型改正;接收机钟差参数、卫星钟差参数以及系统间偏差ISB均当作白噪声处理;对流层影响采用Saastamoinen模型加以改正。卫星钟差估计数据处理的具体策略如表1所示。
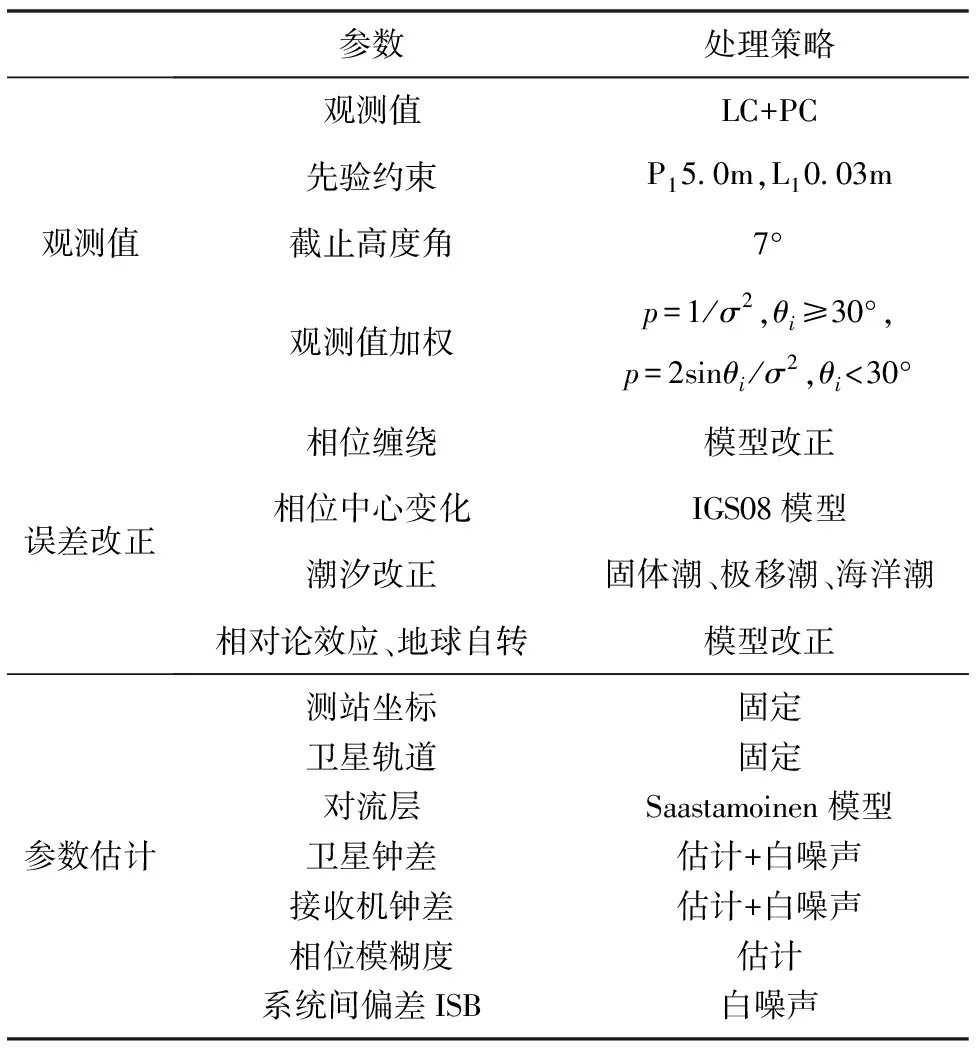
表1 GNSS卫星钟差估计策略
2 钟差分析与定位验证
2.1 卫星钟差精度分析
本文选用2017年第300d全球分布的56个IGS跟踪站数据对GNSS事后卫星钟差进行估计与分析,卫星钟差计算时采用30s的时间间隔,测站分布如图1所示。GNSS卫星钟差估计中,观测量是卫星与测站之间的相对时间延迟,解算得到的卫星绝对钟差与基准钟绝对钟差之间的差值为相对钟差。在保证基准钟的钟差精度优于10-6s的情况下,相对钟差和绝对钟差对定位影响是等价的,本文所讨论的GNSS卫星钟差均指相对钟差[23]。由于所选卫星钟差基准不同,故需先消去基准钟差偏差才能真实反映卫星钟差精度。对卫星钟差估计结果的精度评价采用与IGS最终精密钟差作二次差[23]比较的方法,即先将本文解算得到的卫星钟差结果与IGS的30s最终精密钟差产品作一次差,再通过选择一参考卫星(本文选择1号卫星,观测时段内4号和31号卫星不可见),将作一次差之后的参考卫星钟差差值与其他卫星差值作二次差,消除由于基准钟选择不同而对钟差解算产生的影响。二次差后的统计结果可以有效地反映出计算结果与IGS最终精密钟差之间的符合程度。将计算结果与IGS最终精密钟差进行比较,统计二次差时间序列的标准偏差(Standard Deviation,STD)值
(6)


图1 用于GNSS卫星钟差估计的56个测站分布图Fig.1 Distribution of the 56 stations used inGNSS satellite clock error estimation
限于篇幅,根据本文介绍的GNSS卫星钟差估计基本原理与数据处理策略,文中给出GPS下的卫星钟差解算结果,其他系统的解算结果基本一致。解算得到2017年第300d的卫星钟差,并将其与IGS最终精密卫星钟差进行比较。如图2所示,统计结果表明,本文解算得到的卫星钟差与IGS最终精密卫星钟差二次差的标准偏差均优于0.012m,所有卫星标准偏差的平均值为0.007m。各卫星钟差计算结果的偏差均值如图3所示,均优于0.25m。表2给出了多系统卫星钟差偏差的统计结果,比较分析得到利用多系统进行卫星钟差估计,各解算结果的平均标准偏差互差优于2mm;平均偏差互差优于3mm。可见,利用本文算法解算得到的卫星钟差与IGS最终精密钟差产品的精度相当,两者相差较小。分析其偏差产生的原因在于,目前本文卫星钟差估计时初值的选取以及随机模型与IGS存在差别,导致解算结果与IGS钟差产品之间存在与卫星相关的系统性偏差。
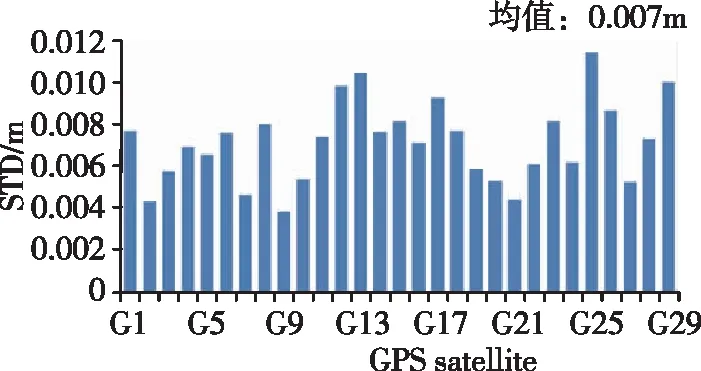
图2 GPS卫星钟差与IGS最终精密钟差的标准偏差Fig.2 STD of GPS satellite clock and IGS final precise clock
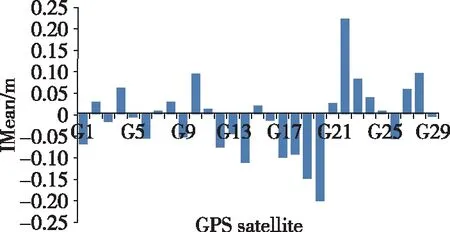
图3 GPS卫星钟差与IGS最终精密钟差的偏差均值Fig.3 Deviation mean of GPS satellite clock andIGS final precise clock

GPSGLONASSGalileoBDSM-STD/m0.00720.00830.00660.0069M- D /m-0.0097-0.0114-0.0091-0.0093
2.2 定位结果验证
为了分析和验证本文卫星钟差解算结果的精度及其定位性能,将估计的卫星钟差用于定位试验,分别进行静态与动态PPP解算,并将定位结果与IGS最终精密卫星钟差的定位结果进行比较分析,进一步验证本文解算得到的卫星钟差的定位性能。这里给出GPS定位结果的验证分析,其他系统基本一致。
表3分别以GPS静态及动态PPP比较分析了本文解算得到的卫星钟差与IGS精密钟差的定位收敛时间[24]。从比较结果中可以看到,GPS PPP的收敛时间较短,静态平均收敛时间约为22min,动态平均收敛时间约为36min,并且本文估计钟差与IGS精密钟差定位收敛时间除WILL站静态收敛时间相差14min,其余测站PPP收敛时间相差较小,均小于10min,稳定性较高。可见,本文解算得到的卫星钟差与IGS最终精密钟差用于PPP解算时的收敛时间相当,分析其原因在于二次差后剩下的常数项偏差被模糊度吸收,不对结果造成影响,故两者区别不大。
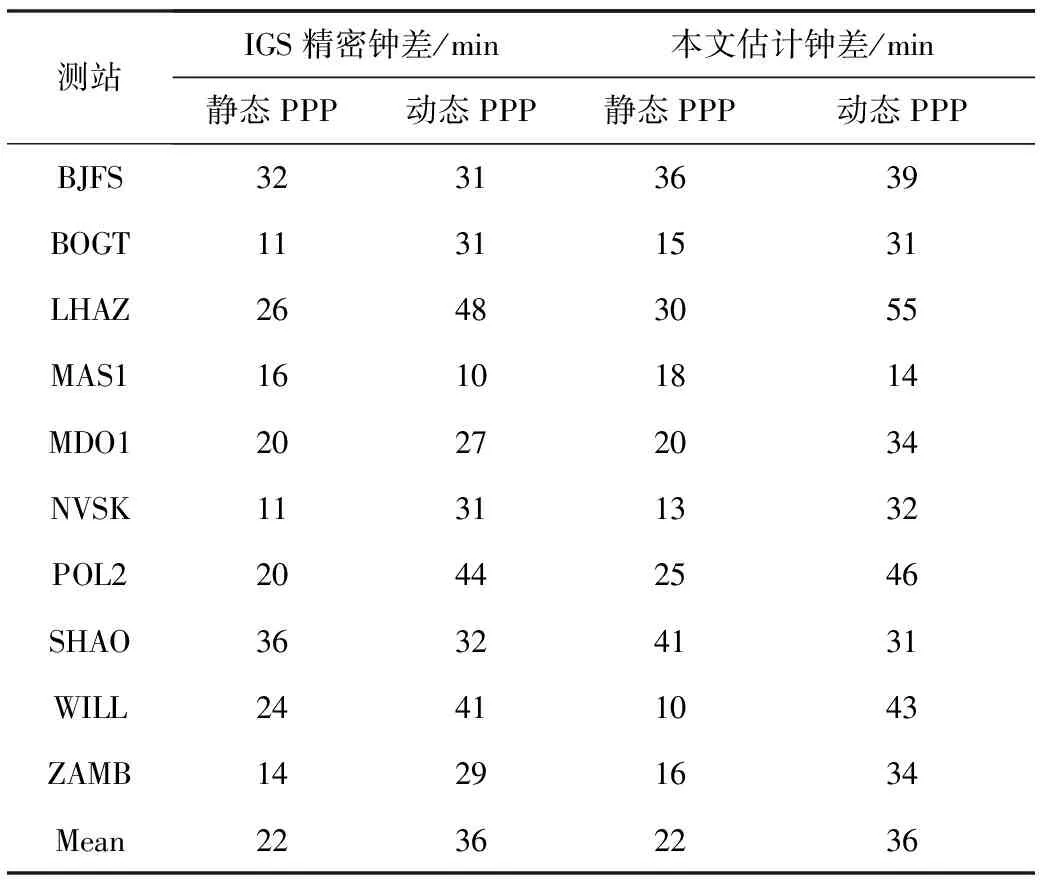
表3 GPS卫星钟差定位收敛时间比较
图4、图5所示分别为利用本文估计卫星钟差以及IGS最终精密钟差对BJFS站(39.61N,115.89E)进行静态、动态精密单点定位试验。由结果可以得到,在定位收敛之后,本文解算得到的钟差产品与IGS精密钟差静态PPP定位精度在E、N、U这3个方向上分别为,本文解算:0.0582m、0.0466m、0.1188m;IGS:0.0385m、0.0259m、0.0736m;动态PPP定位精度在E、N、U这3个方向上分别为,本文解算:0.0671m、0.0640m、0.3200m;IGS:0.0481m、0.0435m、0.2260m。从图中可以看出,本文解算得到的GPS卫星钟差与IGS最终精密钟差的定位结果在定位收敛后符合较好,说明两者差异较小,精度符合较高,也验证了本文解算得到的钟差产品的定位性能。
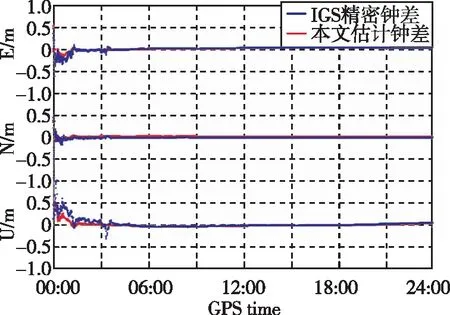
图4 BJFS站GPS静态精密单点定位结果比较Fig.4 Comparison of GPS static PPPresults for BJFS station
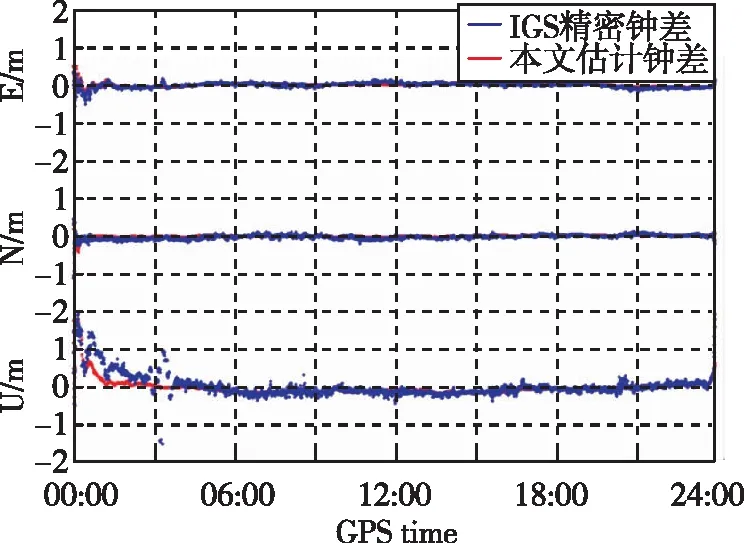
图5 BJFS站GPS动态精密单点定位结果比较Fig.5 Comparison of GPS kinematic PPPresults for BJFS station
图6是利用本文解算得到的卫星钟差与IGS最终精密钟差进行伪距定位的结果,从图6中可以看出,利用2套钟差产品在伪距单点定位中精度较为符合。表4给出了2套卫星钟差在伪距单点定位中的RMS值,其互差在E、N、U这3个方向优于0.06m,相较于PPP定位结果互差较大。分析其原因为二次差之后剩下的常数项偏差影响了SPP的定位精度,可能由伪距观测值中的卫星钟差系统性偏差引起,仍需进一步研究。
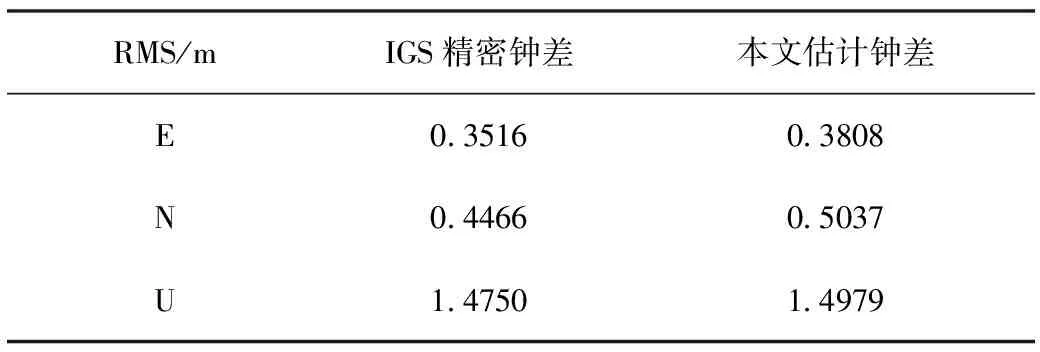
RMS/mIGS精密钟差本文估计钟差E0.35160.3808N0.44660.5037U1.47501.4979
GLONASS、Galileo以及BDS的定位验证结果与GPS基本一致。基于同济大学导航定位软件,解算不同系统的定位结果。表5给出了4个系统5d的收敛时间差比较,表明本文解算得到的卫星钟差产品与IGS最终精密钟差在不同系统下的定位收敛时间差相差不大;表6给出了卫星钟差用于伪距单点定位时不同系统、3个方向上的RMS差值统计结果,表明2套卫星钟差产品用于SPP验证时不同系统下的RMS差值相差较小。由以上结果可以分析得到,2套钟差产品在不同系统下的定位结果基本一致,进一步表明了本文解算得到的多系统卫星钟差产品的定位性能。
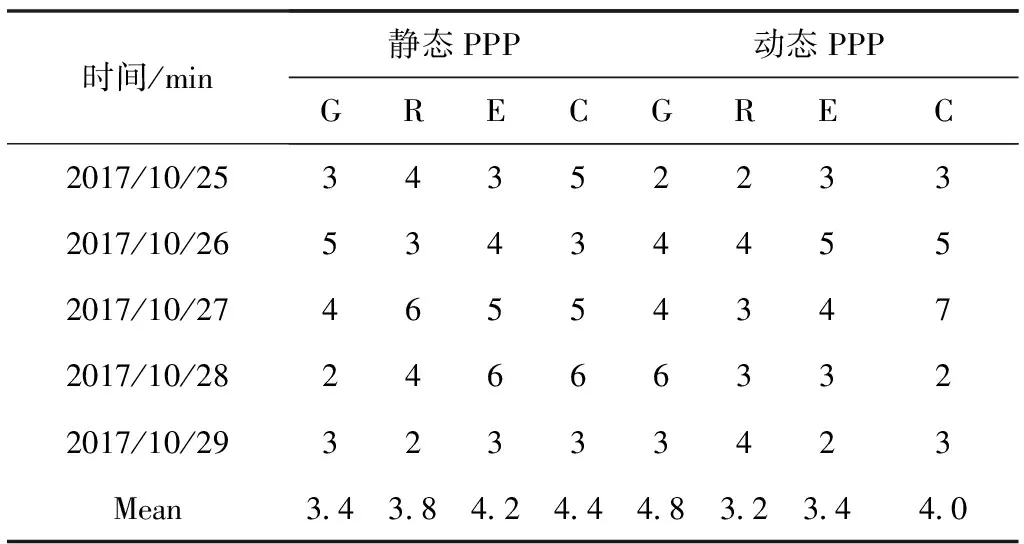
表5 GNSS卫星钟差定位收敛时间差比较
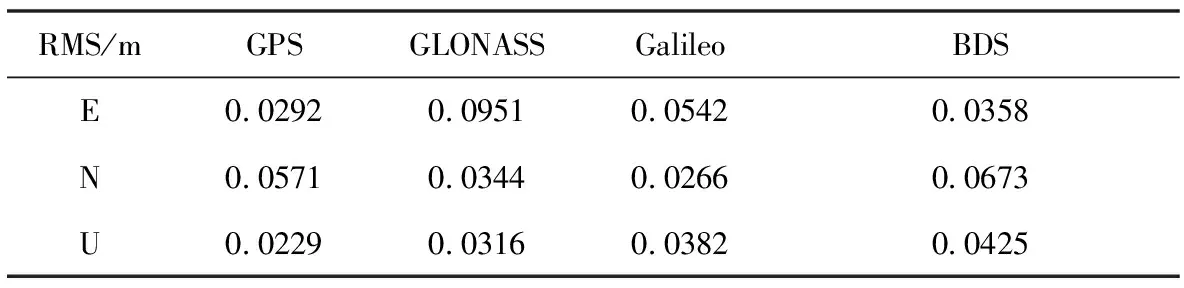
表6 GNSS卫星钟差单点定位RMS差值比较
3 结论
本文介绍了GNSS卫星钟差估计的基本原理及算法,包括观测方程、处理策略等,并选取了56个全球分布的IGS跟踪站进行卫星钟差估计,根据卫星钟差估计结果与IGS最终精密卫星钟差进行对比,分析了解算得到的卫星钟差的处理精度与钟差产品的定位性能。以GPS解算结果为例,统计结果表明,本文解算得到的卫星钟差与IGS最终精密钟差符合较好,二次差精度优于0.04ns(约为0.012m),平均精度为0.02ns(约为0.007m),各卫星钟差偏差均值优于0.25m,多系统卫星钟差解算结果互差优于亚纳秒级。将解算得到的钟差产品应用于定位解算,通过比较分析得出,GPS静态PPP在经过约22min后定位趋于收敛,E、N、U这3个方向精度优于0.0025m、0.0302m、0.0267m;GPS动态PPP在经过约36min后定位趋于收敛,E、N、U这3个方向精度优于0.0106m、0.0220m、0.0415m。与IGS最终精密钟差的定位结果相差较小,说明两者精度符合较好,也验证了本文解算得到的卫星钟差的定位性能。SPP的2套钟差产品定位结果的RMS值互差在E、N、U这3个方向优于0.06m,相较于PPP定位结果互差较大,分析其原因为二次差之后剩下的常数项偏差影响了SPP的定位精度,可能由伪距观测值中的卫星钟差系统性偏差引起,仍需进一步研究。
由于目前所考虑的误差模型不够精确,可能会对定位结果带来系统性偏差。在今后的工作中还必须对各类误差模型进一步精化,消除其影响。另外,相对于事后卫星钟差估计,实时卫星钟差估计的数据处理及随机模型更为复杂,也更具有应用价值。因此,实时卫星钟差估计将是未来研究的一个重要方向。
