行星变速箱退化特征参数提取方法*
2019-05-09倪祥龙赵建民陈吉潮张星辉李海平
倪祥龙, 赵建民, 陈吉潮, 张星辉, 李海平
(1.中国洛阳电子装备试验中心 洛阳,471003) (2.陆军工程大学石家庄校区 石家庄,050003) (3. 航天工程大学士官学校 北京,102249)
引 言
由于行星传动系统具有体积小、传动比大、效率高等优点,已被广泛用于现代工业大型复杂机械设备中,如风机、直升机、起重机等。由于其独特的结构,行星变速箱与传统的平行轴齿轮箱有着很大的不同[1]。因此,研究行星传动系统的PHM方法具有十分重要的意义。
近几年,行星传动系统的健康状态评估是一个研究热点。例如,Chaari等[2]通过动态建模分析研究了行星变速箱齿轮故障对于振动反馈的影响。为了计算局部故障和分布故障的频率,Feng等[3]提出了行星变速箱振动信号模型和解析式。考虑到风机工作环境不稳定这一实际情况,Chen等[4]研究了动态环境下的行星变速箱故障诊断和状态监测方法。Bartelmus等[5]针对非稳定环境条件下的行星变速箱状态监测需求,提出了新的特征参数。考虑到有些传动系统有着不止一级的行星齿轮,Lei等[6]研究了多级行星变速箱的健康状态辨别方法,总结了行星变速箱状态监测和故障诊断的研究现状和发展方向[7]。
相比之下,对于行星变速箱退化分析与故障预测的研究还比较少。例如,Marcos等[8]研究了直升机UH-60主减速器行星架裂纹的故障预测方法。Cheng等[9-10]基于仿真和物理模型研究行星齿轮副点蚀损伤程度评估方法和质量损伤监测方法。Ni等[11-12]将非线性状态空间模型用于行星变速箱的剩余寿命预测。总体来看,目前行星传动系统的退化分析研究还处于刚刚起步阶段,而且大多注重于故障预测方法的研究,对于退化特征参数提取方法的研究还比较少。然而,行星变速箱退化特征参数的提取对于后续的故障预测至关重要,提取的退化特征参数趋势的好坏直接影响故障预测结果精度。
峭度谱是一种通过峭度计算来确定包含冲击信号成分最优频带的方法,已经被广泛应用于旋转机械的故障诊断等[13-14]。以往的研究表明,RMS等[15]可以用于旋转机械的退化分析,并且效果较好。
借助峭度谱的信号处理和构图方法,笔者提出可用于旋转机械退化分析的RMS谱。在信号处理方面,RMS谱与峭度谱的唯一不同之处在于前者用RMS代替峭度成为提取的特征参数。在构图方面,RMS谱将不同时间点峭度谱图层中的某一层提取出来,重新组合成一张既有频域维信息,又有时域维信息的谱图。文中的主要创新点在于,新提出的RMS谱能够同时从频域维和时域维对RMS进行分解,既能观察某一时刻内不同频率区间的RMS分布,也能分析某一频率区间RMS随着时间推移的变化趋势。这一方法把传统的退化特征参数分析方法从二维扩展到三维,使退化信息的分析和提取方式更加丰富,有助于提取更适合退化预测的特征参数。
1 峭度谱
峭度谱应用于旋转机械故障诊断的基本思想[13-14]是:如果信号中由故障信号产生的冲击成分占主导,其峭度值往往较大;相反,如果信号中非冲击成分占主导,其峭度值则较小。然后,根据峭度值的大小寻找包含最强冲击成分的频带信号用于进一步的故障分析。
在峭度谱的计算过程中,如果从所有中心频率和带宽组合形成的频带中计算峭度值将会耗费相当大的计算资源,可行性较差。文献[13-14]将小波包分解(wavelet packet decomposition,简称WPD)用于峭度谱的频带分解中,取得较好的效果。因此,文中也选择用WPD来分解振动信号。
WPD可以用小波树的形式表示,如图1为3层WPD的小波树。以振动信号为例,如果采样频率为Fs,3层WPD可将信号分解为8个频带,每个频带带宽为Fs/16 Hz。详细的WPD理论及推导见文献[16]。
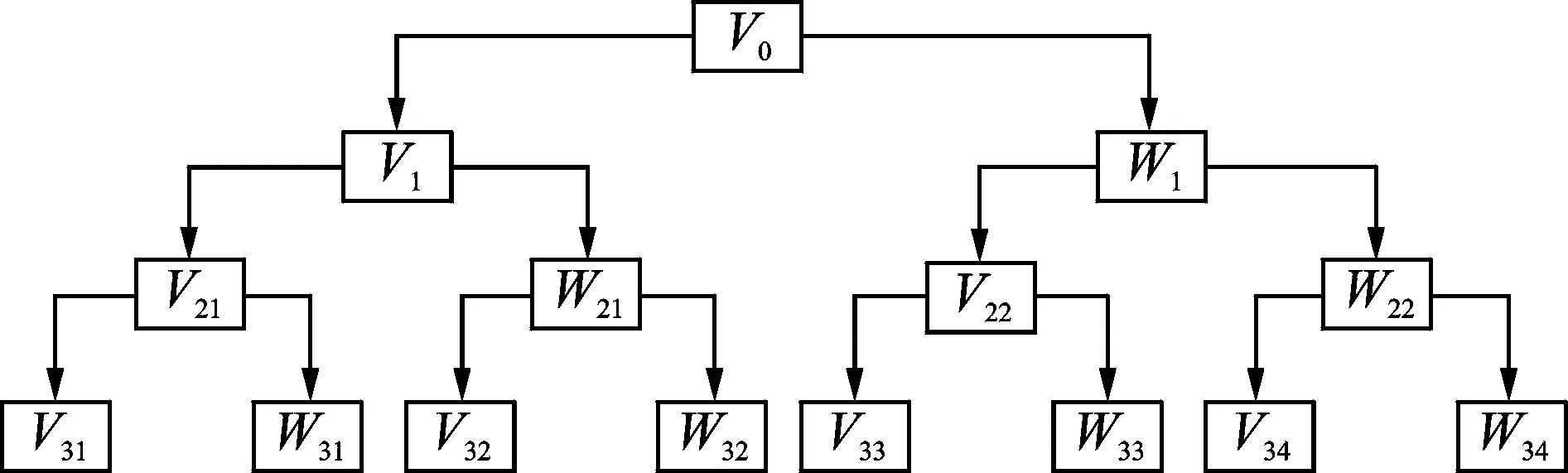
图1 3层小波包分解Fig.1 Three levels wavelet packet decomposition
以机械故障预防技术协会(machinery failure prevention technology,简称MFPT)轴承预植故障实验数据为例,说明峭度谱的使用。转频为25 Hz、负载为22.679 6 kg(50磅)条件下,轴承外圈故障的特征频率(FO)为81.12 Hz,基于WPD的峭度谱方法得到的峭度谱如图2所示,可以发现节点(5,2)的颜色是最深的,进一步分析节点(5,2)的包络信号,得到如图3所示的功率谱。可见,峭度谱方法应用于轴承故障诊断的效果较好。
图2 轴承外圈故障信号的峭度谱Fig.2 Kurtogram of bearing outer ring fault signal
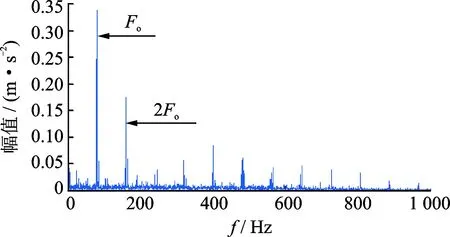
图3 轴承外圈故障信号的功率谱Fig.3 Power spectrum of bearing outer ring fault signal
2 RMS峭度谱
2.1 RMS谱原理
一般情况下,RMS随着系统的退化而增加,退化越严重RMS值越大。笔者提出的RMS谱用RMS代替峭度谱中的峭度成为提取的特征参数,使峭度谱从用于故障诊断变为用于退化分析。在RMS谱的信号处理过程中,需要计算分解出来的每一频带信号的RMS,其计算方式如式(1)所示
(1)
其中:xi为离散振动信号;N为对应时间序列中的振动信号数量。
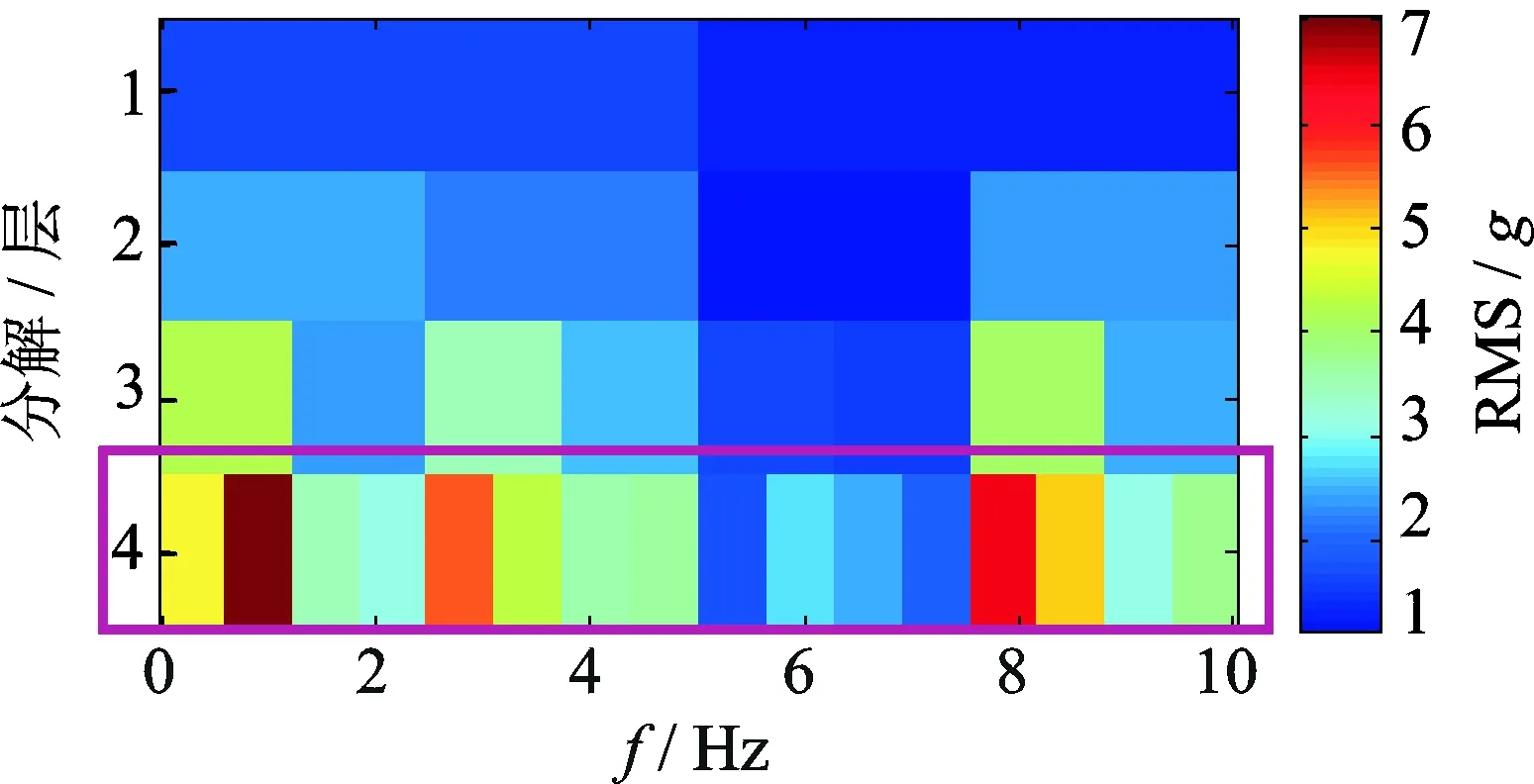
图4 第850组数据的RMS谱Fig.4 RMS spectrum of the 850th set of data
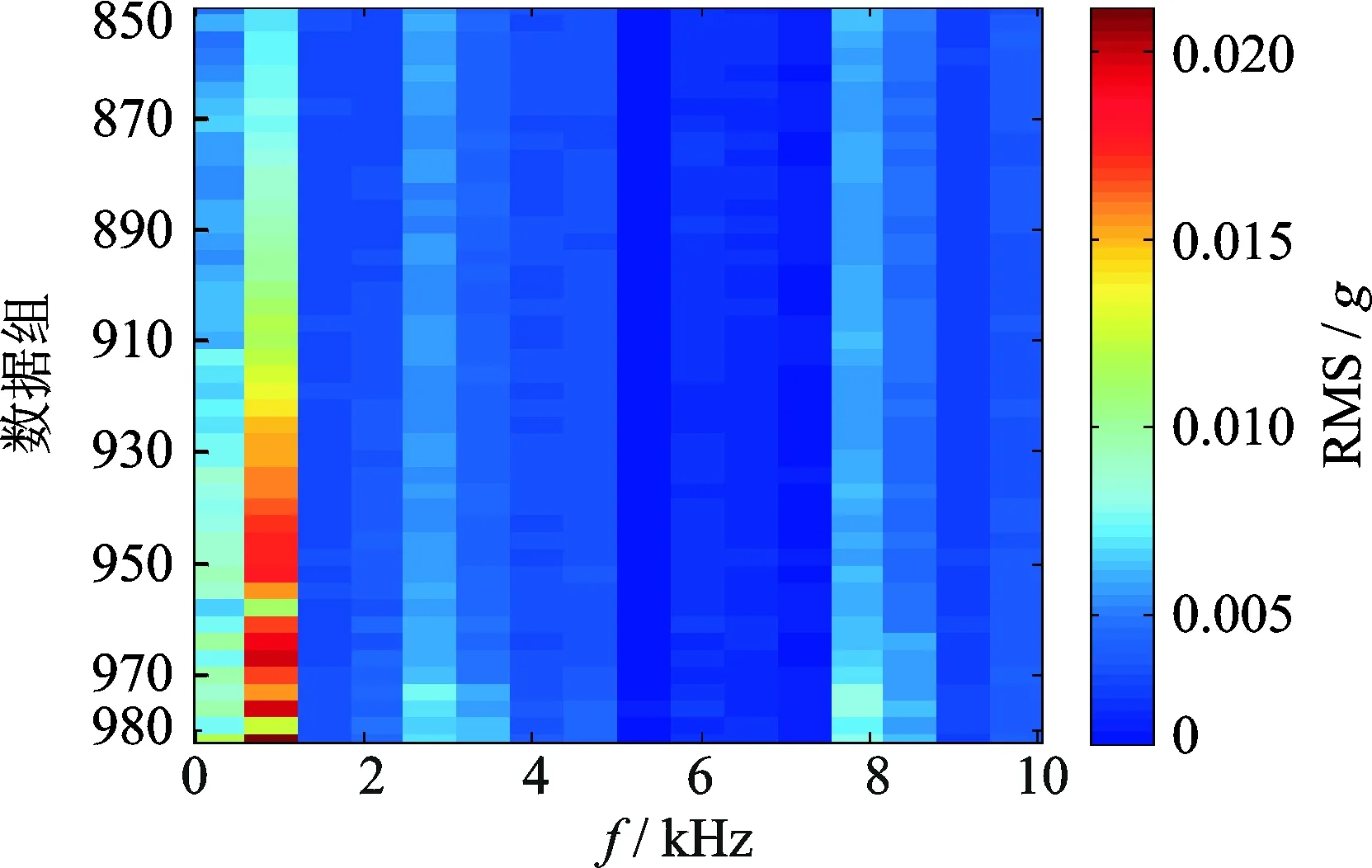
图5 第(850~982)数据组的RMS谱Fig.5 RMS spectrum of the (850~982)th set of data
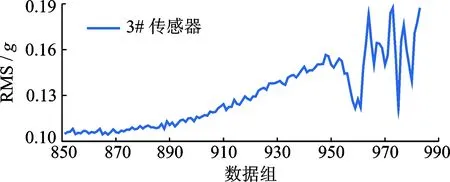
图6 第(850~982)组数据的RMSFig.6 Total RMS of the (850~984)th set of data
以美国智能维护系统中心(intelligent maintenance systems center)公开的第2组轴承全寿命数据为例,说明RMS谱的构造过程。这一组全寿命数据共有984组数据,取第850组数据用WPD进行频带分解,构造得到单一时间点的RMS谱,如图4所示。其中,WPD的第4层将振动信号频域[0,Fs/2]均分为16个频带,每一个频带的宽度是625 Hz。提取轴承全寿命数据中的第850~982组数据单一时间点RMS谱的第4层,组成如图5所示的时间序列RMS谱(纵轴间隔为3)。图6为对应第850~982组数据的总RMS(为了与后面特定频带范围的RMS进行区分,文中将[0,Fs/2]Hz内信号的RMS称为总RMS)。
从图5和图6可以发现,RMS谱的颜色随着轴承总RMS的变化而变化,总RMS越大对应的颜色越深,而且该全寿命信号的RMS主要集中在频带[625,1 250]Hz,说明这一频带区间内的振动信号占主导地位。可见,RMS谱方法可以应用于轴承的退化分析。
RMS谱方法的信号处理流程如图7所示。
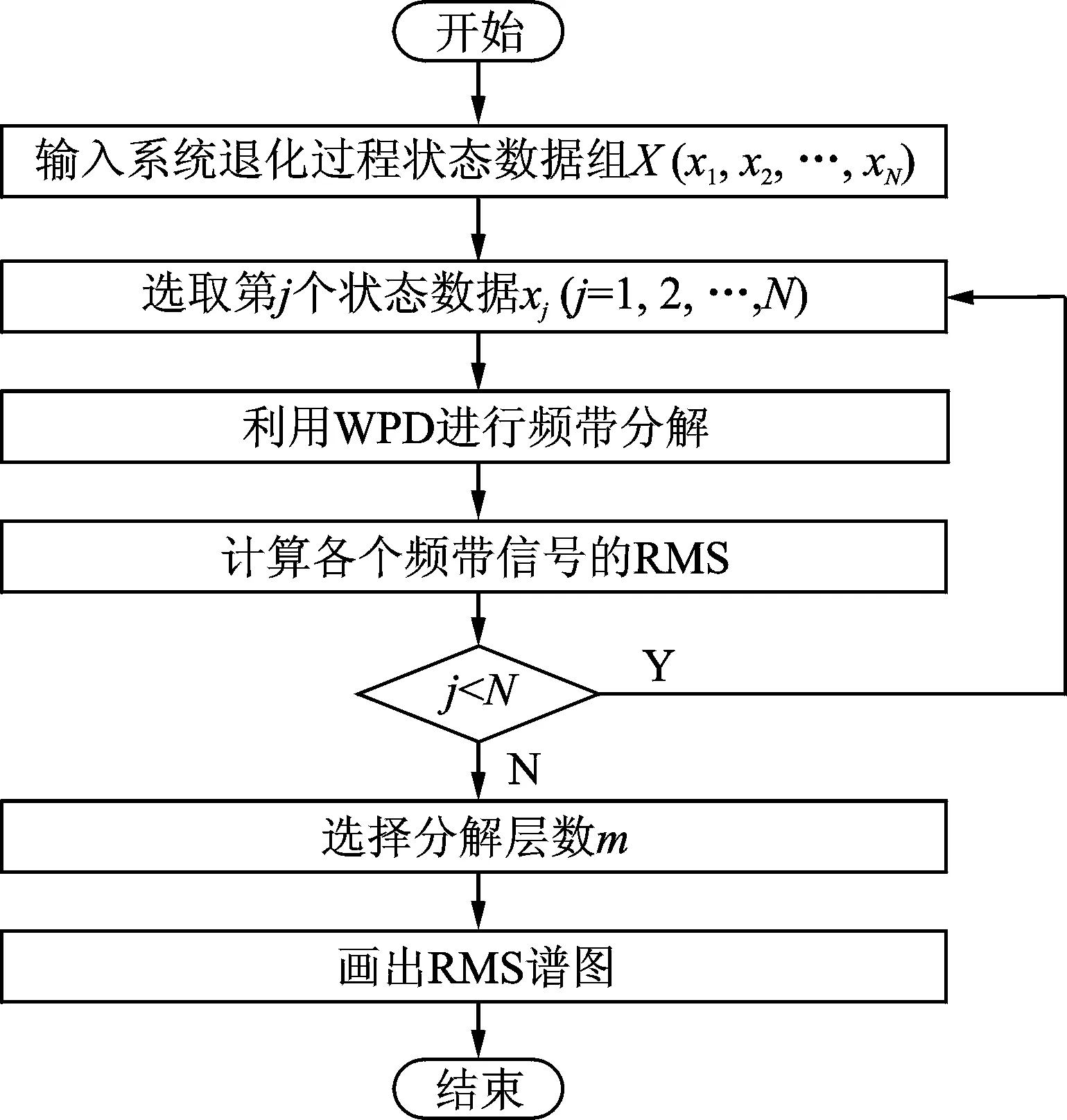
图7 RMS谱计算流程图Fig.7 Flow chart of RMS spectrum calculation
2.2 RMS归一化谱原理
根据WPD的原理可知,分解的第i层划分有2i个频带,设其第j个频带信号的RMS为Xi,j(j=1,2,…,2i),第i层的2i个频带中RMS最大值是Xi,max,最小值是Xi,min。将第i层2i个频带的RMS归一化处理,使得第i层RMS最大值所在的频带更加明显。Xi,j的归一化处理方式如下
(2)
其中:Yi,j为第i层第j个频带信号RMS的归一化参数,是无量纲参数。
与RMS谱类似,可由RMS的归一化参数得到RMS归一化谱。
从图5中发现,在RMS谱中当某一时间点有个别频带信号的RMS比较大时,其他频带信号RMS大小的区别就不明显。而RMS归一化谱把每一时间点特征参数的变化范围都规范在0~1范围内,这样同一时间点各频带信号RMS大小的分布就比较明显。由图5处理得到的RMS归一化谱如图8所示,各个时间点信号成分的主要频带很清晰,频率范围[625,1250]Hz一直是信号的主要频带。
根据RMS谱和RMS归一化谱的原理可以发现, RMS谱比较适合用于分析各频带RMS的变化
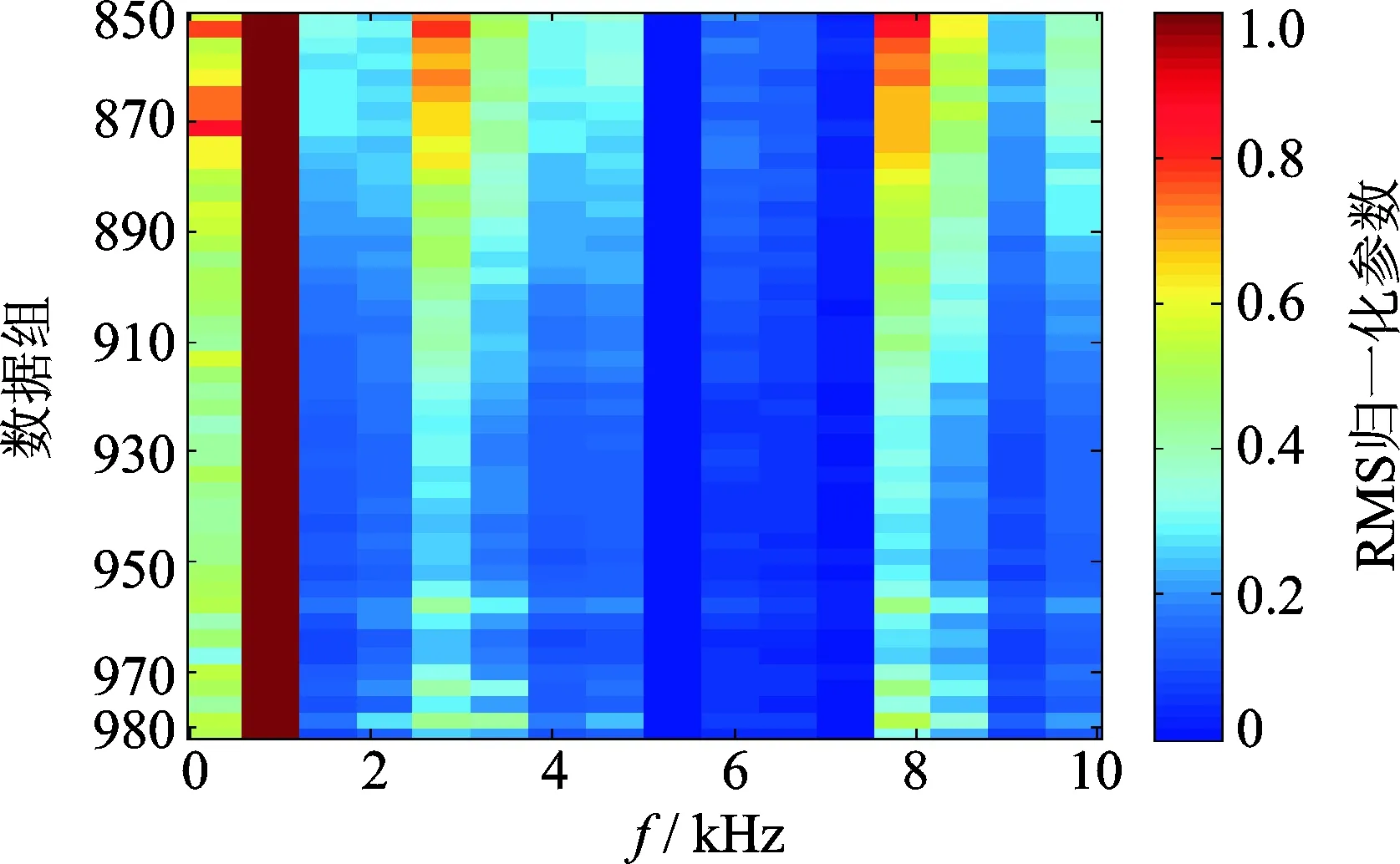
图8 (850~982)数据组的RMS归一化谱Fig.8 RMS normalized spectrum of the (850~982)th set of data
趋势,而RMS归一化谱适合用于分析符合某一特定情况的频带的变化情况。而且,RMS谱和RMS归一化谱的应用并不局限于时间序列,只要是根据特定规则变化的情况就可以用,例如按规律变化的变转速工况和变负载工况。
3 行星变速箱退化特性分析
本节将文章提出的RMS谱方法用于研究行星变速箱的退化过程,以验证该方法的有效性,并进一步探索行星变速箱退化特征参数提取方法。
3.1 行星变速箱退化过程实验
行星变速箱的退化过程数据来自于一个全寿命退化实验。行星变速箱实验台如图9所示,该实验台由提供动力的三相异步电磁调速电机、提供负载的风冷磁粉制动器(负载大小由电流控制)、采集转速和转矩信号的转速转矩传感器、实验齿轮箱等主要部分组成。该实验齿轮箱为单级NGW-11型行星变速箱,传动比为12.5,具体结构参数见图10。实验过程中,在行星变速箱箱体上安装了4个振动加速度传感器,传感器具体安装位置如图11所示。
在全寿命退化过程实验中,行星变速箱的输入轴转速约为1 000 r/min,磁粉制动器的负载电流为1 A(约为340 N·m)。 振动信号的采样频率(Fs)
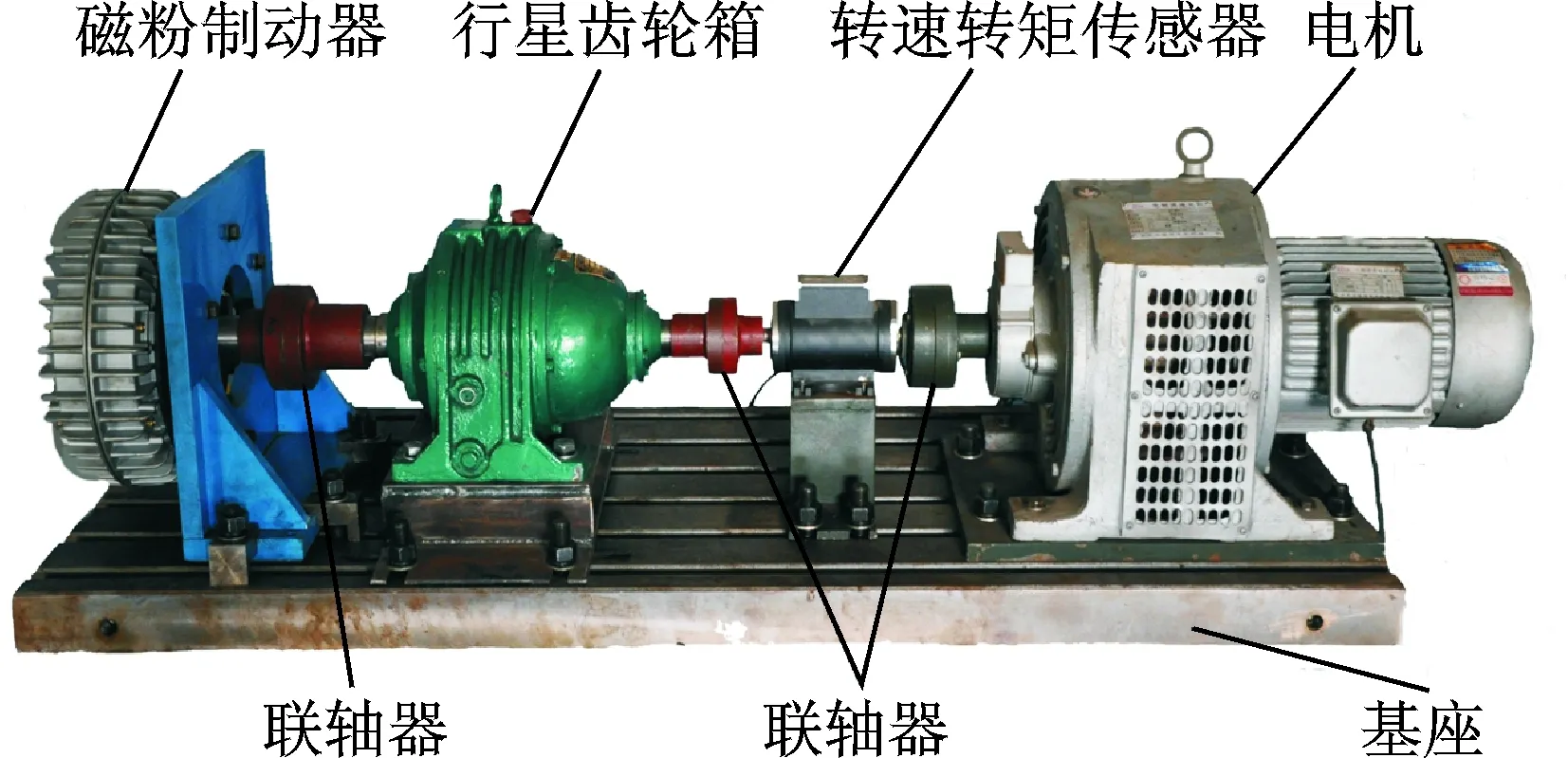
图9 行星变速箱实验台Fig.9 The test rig of planetary gearbox
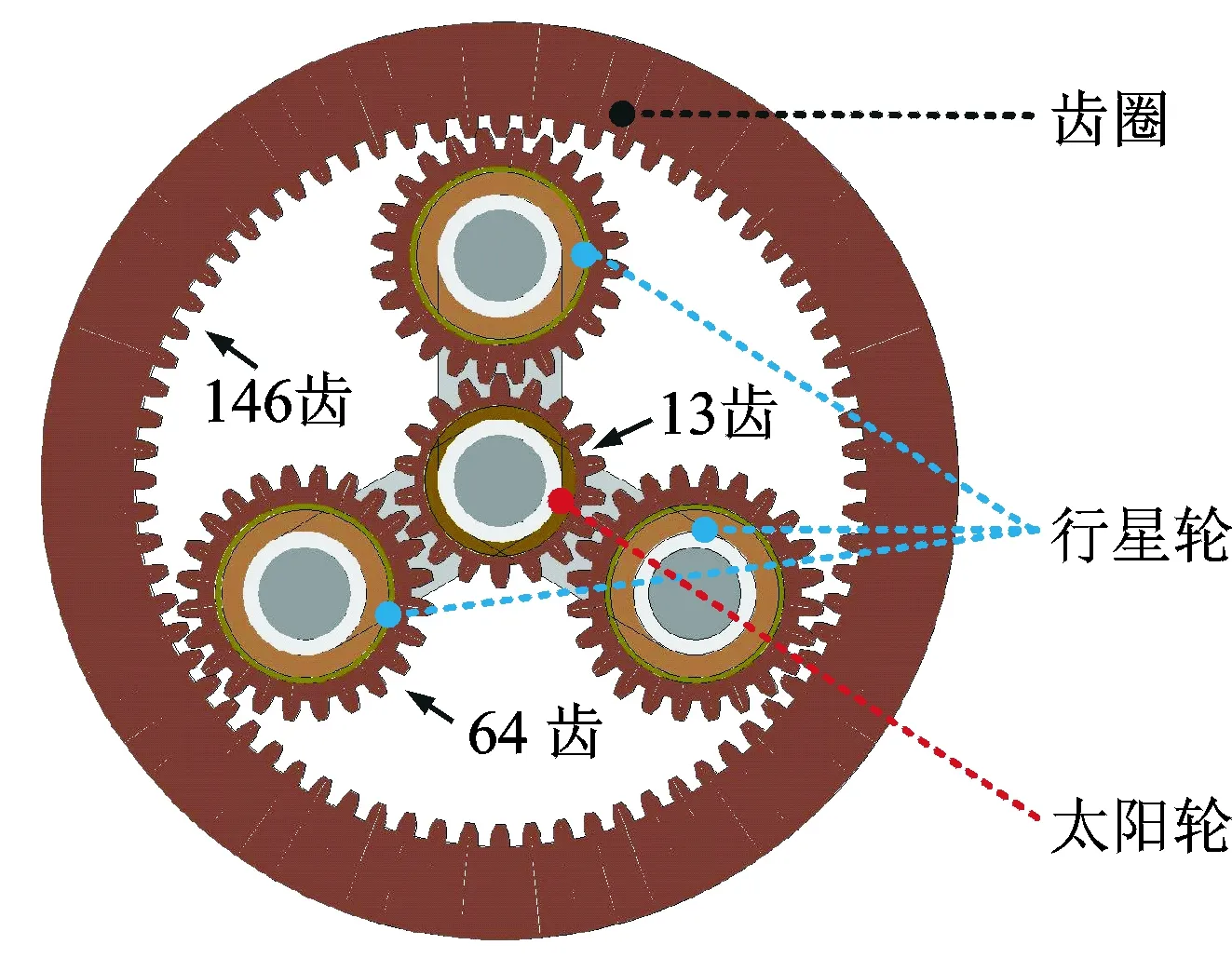
图10 行星变速箱内部结构Fig.10 Schematic map of planetary gearbox structure
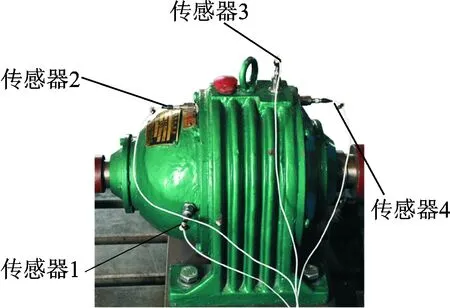
图11 传感器安装位置Fig.11 Mounted location of every sensor
为20 kHz,每次采集持续12 s,每隔5 min采样一次。在保证主要实验顺利完成的前提下,还不定期地采集了一些转速变化和负载变化情况下的振动信号。
全寿命退化过程实验总共持续了1 003 h,实验后行星变速箱主要齿轮的磨损情况如图12所示。太阳轮齿面的磨损程度最大;齿圈齿面的磨损程度最小;行星轮两侧齿面均有磨损,且与齿圈啮合的一面磨损程度比另一面更严重。

图12 实验后照片Fig.12 Gears after experiment
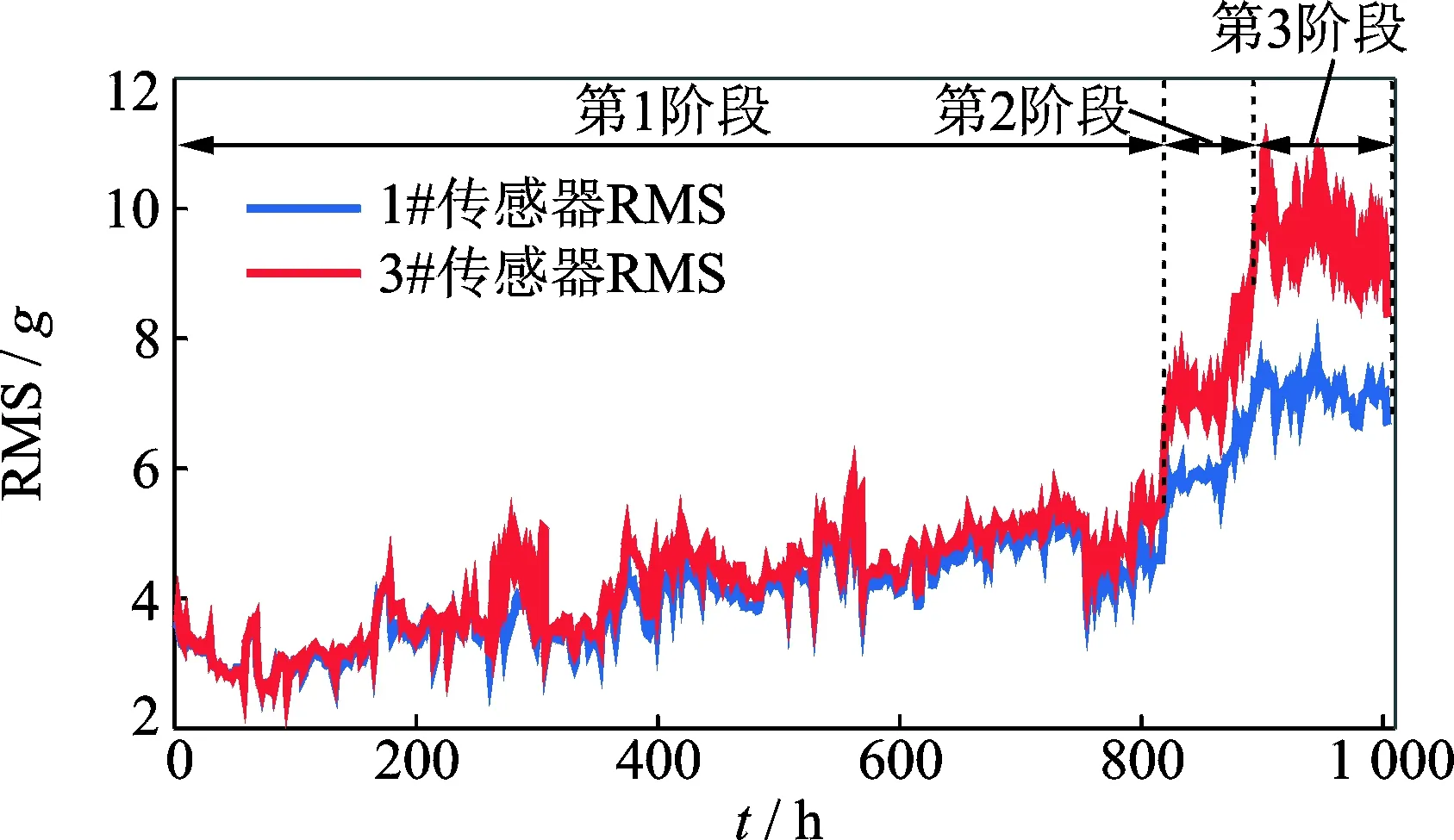
图13 传感器1#和3#的总RMSFig.13 Total RMS of sensor 1# and 3#
笔者仅分析传感器1#和3#的退化过程数据,且每间隔一个小时取一个数据组。行星变速箱全寿命退化过程中,传感器1#和3#振动信号的总RMS趋势如图13所示。从图13可以看出,退化过程的RMS趋势呈现为3个阶段:a.第1阶段(约为0~817 h),逐渐上升的平稳阶段,这一阶段RMS比较稳定,上下波动的幅度小,平均增长速度较慢;b.第2阶段(约为818~894 h),快速上升阶段,这一阶段RMS的平均增长速度明显变大,甚至有突然跳跃式增长的现象;c.第3阶段(约为895~1 003 h),上下波动阶段,这一阶段RMS的平均值变化没有固定的模式,但是上下波动变化较快、幅度较大。
3.2 基于RMS谱的主频带分析
图14为传感器1#整个退化过程(0~1 003 h)的RMS谱,纵向的时间间隔为15 h。在频带分解时,共进行4层小波包分解,即将[0,Fs/2]Hz均分为16个频段,每个频段的带宽为625 Hz。
从图14的横轴可以发现,颜色光亮的部分主要集中于频带[625,3 750]Hz,说明这个频带的RMS相对较高。从图14的纵轴可以发现,频带[1 250,3 750]Hz随着时间的推进颜色越来越深,说明这一频带的RMS在退化过程中逐渐增大。

图14 传感器1#的RMS谱Fig.14 RMS spectrum of sensor 1#
图15为传感器3#的RMS谱,其中图(a)为整个退化过程(0~1 003 h)的RMS谱,纵向的间隔时间TT=15 h;图(b)为退化第2阶段和第3阶段(818~1 003 h)的RMS谱,TT=3 h。小波包的分解情况与图14一样。
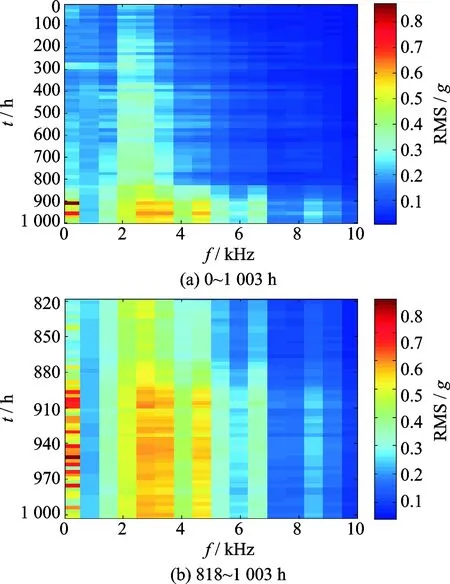
图15 传感器3#的RMS谱Fig.15 RMS spectrum of sensor 3#
从图15(a)和(b)的横轴发现,颜色光亮的部分主要集中于频带[0,625]Hz和[1 250,5 000]Hz,说明这两个频带的RMS相对较高。与传感器1#相比,传感器3#的RMS谱的最大不同是低频带[0,625]Hz的出现,尤其在退化的第2阶段和第3阶段,频带[0,625]Hz范围的颜色深度变化较大,说明这一段时间内低频带RMS的波动要比其他频带大得多。
图16为传感器3#不同频带的RMS,其中差值RMS为总RMS([0,10 000]Hz RMS)与去除低频的RMS([625,10 000]Hz RMS)的差值。从图中可以发现,低频带[0,625]Hz的RMS在第3阶段的波动特别大,这与图15颜色深度变化较大的现象符合(RMS趋势图在t=300 h左右有不稳定的小波峰,这是因为实验时这一时间段的传感器3#出现了松动)。频带[625,10 000]Hz RMS的数值大小和变化趋势与总RMS非常接近,虽然去除低频后的RMS也出现上下波动的情形,但是比总RMS更加平滑,上下波动幅度也相对较小。去除低频后的RMS,相当于滤掉了低频噪音,更能呈现真实的第3阶段变速箱的振动情况,进而反应其退化状态。

图16 传感器3#不同频带的RMSFig.16 The RMS for different frequency bands of sensor 3#
3.3 不同频带RMS趋势分析
由前面的分析知道,传感器1#的RMS主要集中于频带[625,3 750]Hz,传感器3#的RMS主要集中于频带[0,625]Hz和[1 250,5 000]Hz,取两个传感器主频带的交集区间[1 250,3 750]Hz进行分析。根据RMS谱构造过程中小波包4层的频带划分方法,分别提取交集区间对应的4个频带进行分析,频带[1 250,1 875]Hz,[1 875,2 500]Hz,[2 500,3 125]Hz和[3 125,3 750]Hz对应的RMS结果如图17~20所示,从这4个频带的RMS变化趋势可以发现:
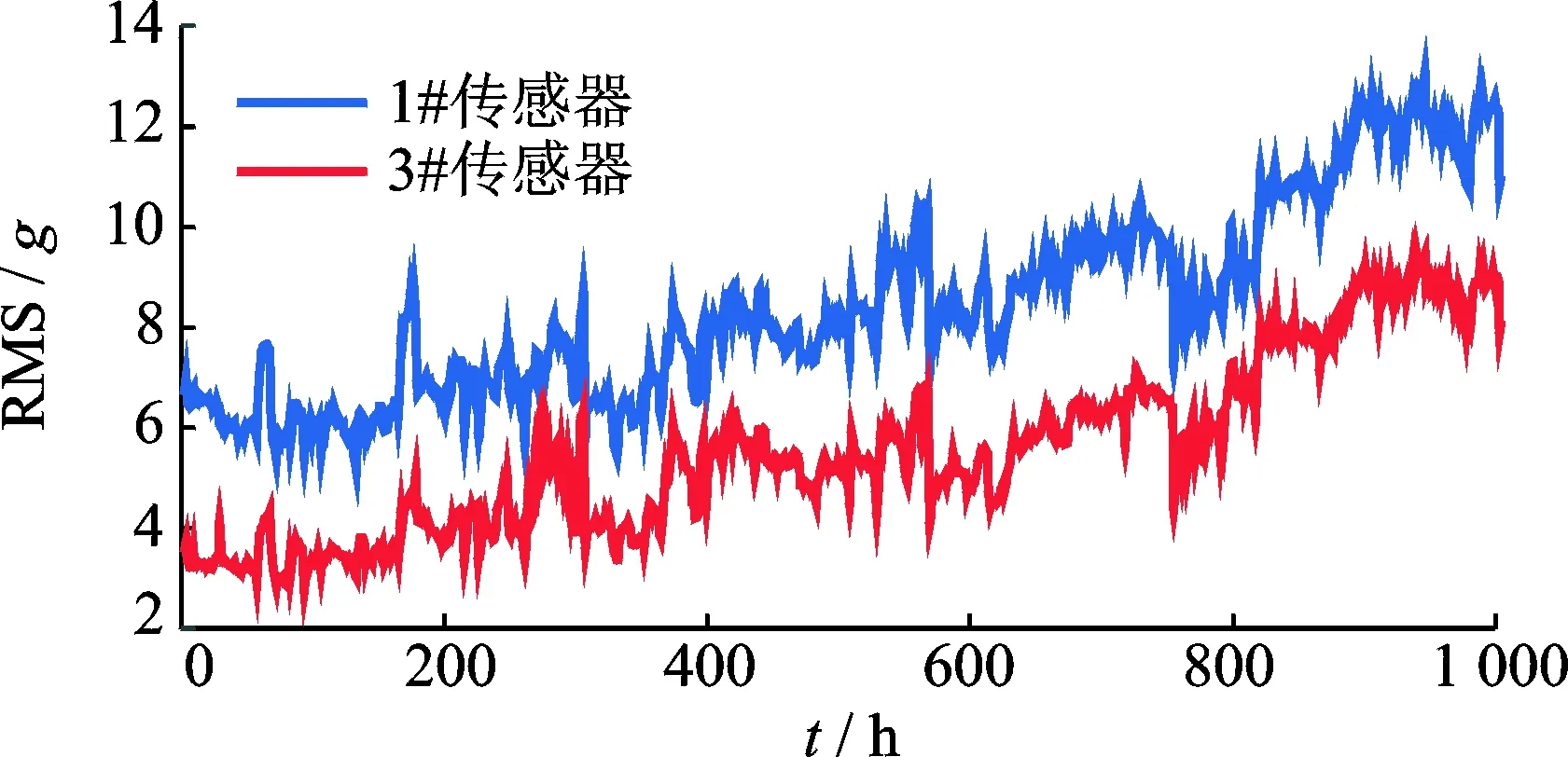
图17 频带[1 250,1 875]Hz的RMSFig.17 RMS of frequency range [1 250,1 875]Hz
图18 频带[1 875,2 500]Hz的RMSFig.18 RMS of frequency range [1 875,2 500]Hz
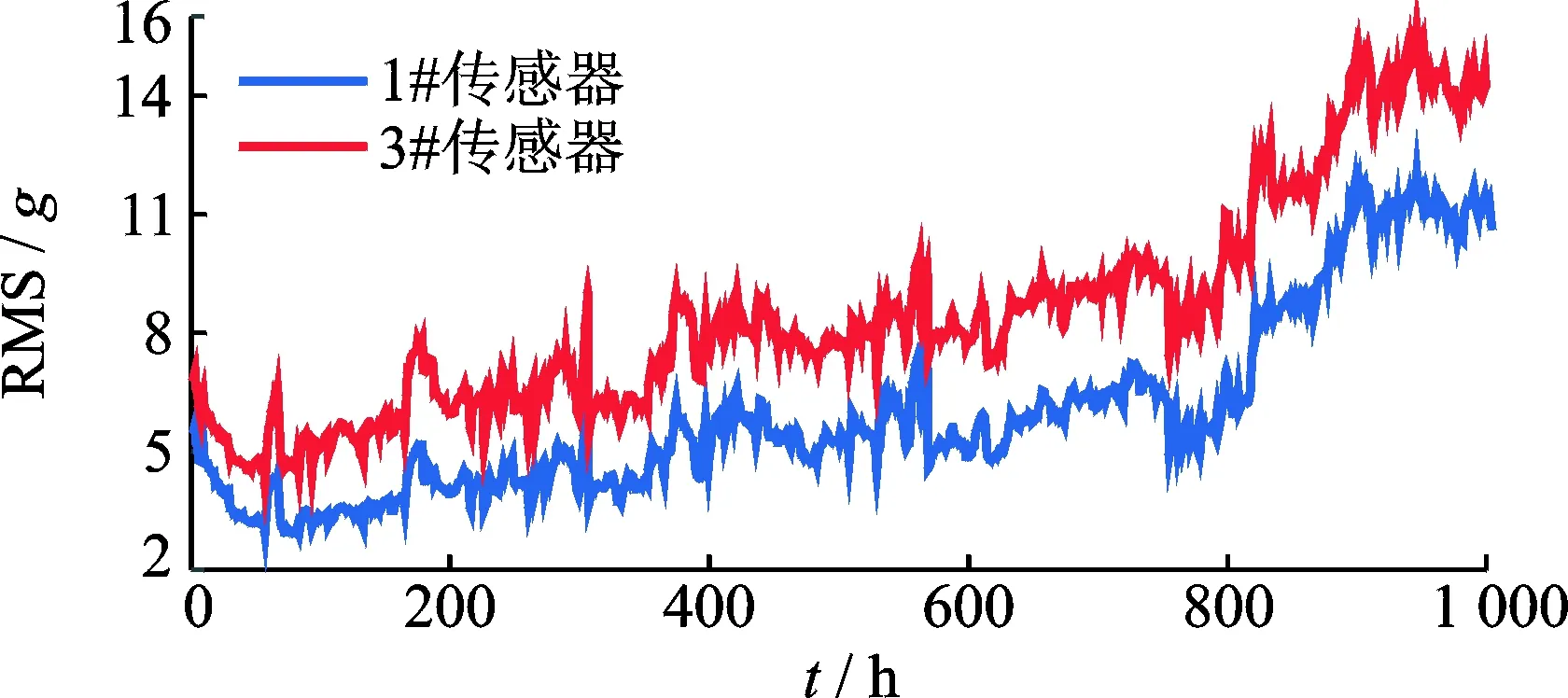
图19 频带[2 500,3 125]Hz的RMSFig.19 RMS of frequency range [2 500,3 125]Hz
图20 频带[3 125,3 750]Hz的RMSFig.20 RMS of frequency range [3 125,3 750]Hz
1) 频带[1 250,1 875]Hz的RMS趋势图的快速增加阶段不明显,虽然波动较大,但整体过程呈现为线性;频带[1 875,2 500]Hz的RMS介于线性和3阶段特性之间;频带[2 500,3 125]Hz的RMS呈现3阶段特性;频带[3 125,3 750]Hz的RMS 3阶段特性非常明显。可见,频带从[1 250,1 875]Hz到[3 125,3 750]Hz的增加过程中,RMS趋势从线性过渡到3阶段特性,且3阶段特性越来越明显。所以,不同频带RMS的趋势不是完全相同的,在退化趋势预测时应该根据需要选用较为合适的频带RMS。从目前现有的退化建模方法来说,呈线性趋势的RMS比呈3阶段趋势的RMS对预测模型的要求更低,更适合用于退化预测。
2) 频带[1 250,1 875]Hz中,传感器1#的RMS始终比传感器3#的RMS大;相反的,频带[2 500,3 125]Hz中,传感器1#的RMS始终比传感器3#的RMS小;而在频带[2 500,3 125]Hz和[3 125,3 750]Hz中,传感器1#和3#的RMS趋势和数值大小非常接近,尤其在第1阶段基本重叠在一起,这一情况与总RMS趋势(图13)的第1阶段比较相似。这些现象说明传感器的安装方式(包括安装位置与安装方向)对采集信号的频率成分是有影响的,不同的传感器安装方式,所采集信号的不同频带RMS的大小排序可能是不一样的。
3.4 转速和负载变化情况下的退化分析
在行星变速箱全寿命退化实验过程中,主要的转速和负载参数是:转速1 000 r/min,负载1 A。故在转速变化的实验中,负载1 A保持不变,实验转速分别为400,600,800,1 000,1 200和1 400 r/min,转速从低到高逐级增加;在负载变化的实验中,转速1 000 r/min保持不变,实验负载分别为0,0.2,0.4,0.6,0.8,1,1.2和1.4 A,负载从低到高逐级增加。在转速或负载变化的情况下,为了保证采集状态信息时实验台运转稳定,每一种工况保持运转5 min后再开始采集振动数据;振动信号的采样频率(Fs)仍为20 kHz,每次采集同样持续12 s,每隔15 s采集一次。
在退化的3个阶段中,每一个阶段各取一组变转速和变负载情况时的状态数据进行分析,且主要分析传感器1#的信息。3组数据对应退化时间点分别是672 h(第1阶段)、887 h(第2阶段)和945 h(第3阶段)。
为了进一步分析转速变化和负载变化情况下,行星变速箱不同频带RMS的变化情况,突出文章提出的RMS谱的频带分析能力在退化研究中的优势,其后小波包分解均取5层,即将[0,Fs/2]Hz均分为32个频段,每个频段带宽为312.5 Hz。
3.4.1 转速变化对主要频带的影响
转速变化情况下,时间点672,887和945 h传感器1#的总RMS如图21所示。从图21发现,变速箱转速相同的情况下,系统运转时间越长,总RMS越大,两者成正比关系;变速箱运转时间相同的情况下,转速越大总RMS就越大,两者同样成正比关系。
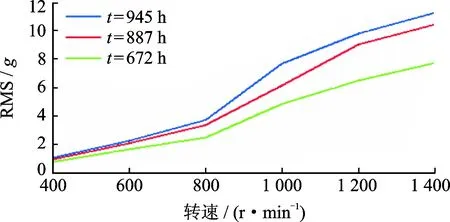
图21 转速变化情况下传感器1#的总RMSFig.21 Total RMS of sensor 1# in speed change case
当时间点t=887 h时,转速变化情况下传感器1#的RMS谱如图22所示。从中可以发现,当转速增大时,各个频带的RMS也增大。但不同频带RMS的增加幅度不一样,频带[1 562.5,2 187.5]Hz(图中标号为①的方框内)增加幅度最大,频带[2 812.5,3 437.5]Hz(图中标号为②的方框内)增加幅度次之。
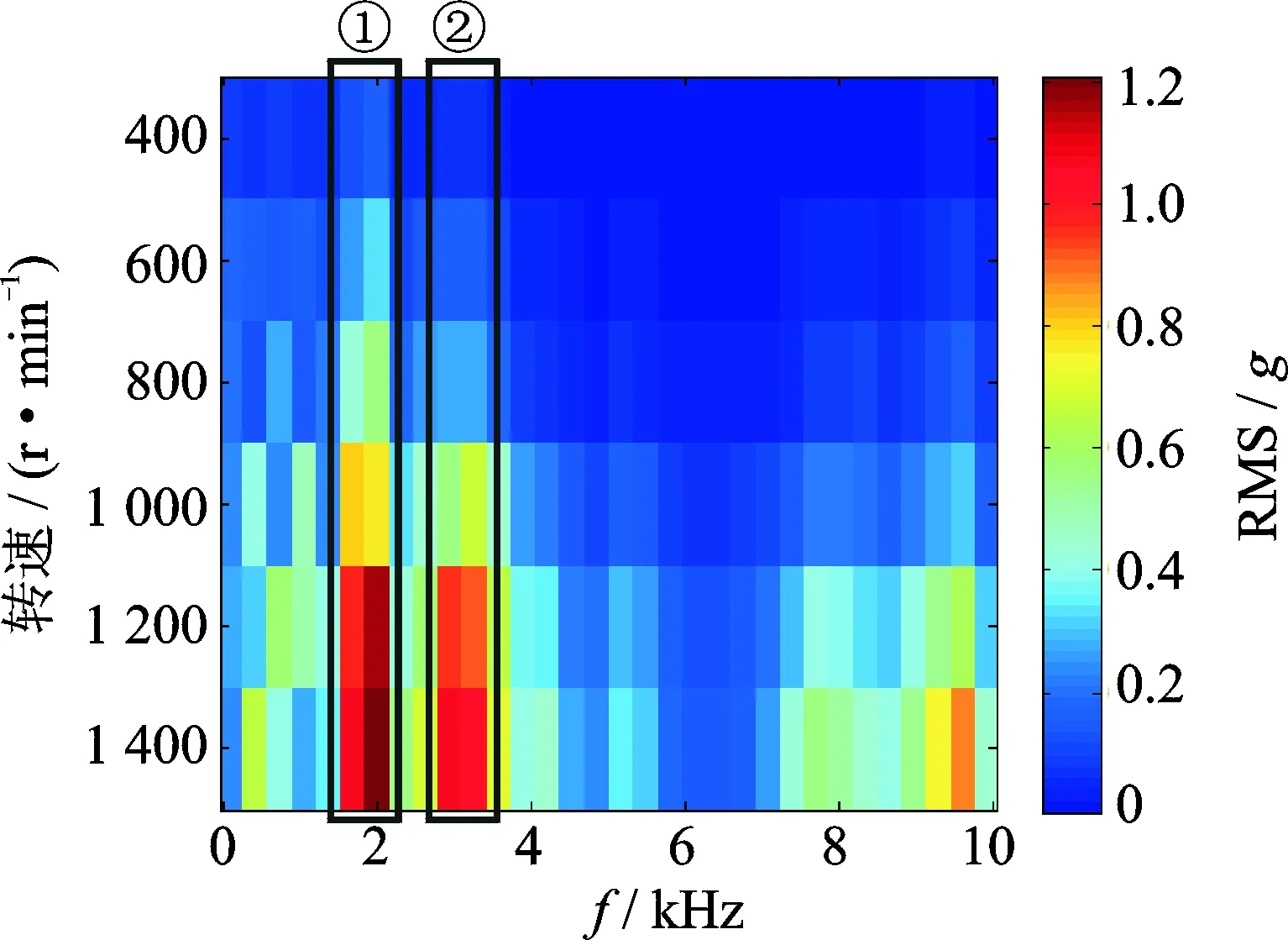
图22 转速变化情况下传感器1#的RMS谱(t=887 h)Fig.22 RMS spectrum of sensor 1# in speed change case (t=887 h)
图23(a~c)分别为时间点672,887和945 h时转速变化情况下传感器1#的RMS归一化谱,从图中可以发现:
1) 同一时间点,即使转速不同,图中颜色最深的一直是在频带[1 562.5,2 187.5]Hz内(图中标号为①的方框内),可见这一频带内的RMS一直是最高的,即这一频带内的振动信号幅值最大;即使是不同的时间点,这一现象也仍然存在。说明该行星变速箱振动信号的最高幅值峰群落于频带[1 562.5,2 187.5]Hz内,不会随着运转时间的变化或转速的变化而发生移动。
2) 对比3个时间点[2812.5,3437.5]Hz内(图中标号为②的方框内)的颜色变化,t=672 h时,方框内的颜色深度在3个时间点中最浅,t=945 h时颜色最深,t=887 h时颜色深度介于两者之间,可见这一频带内颜色深度随着运行时间的增加呈加深趋势。这一现象说明,变速箱退化越严重,这一频带内振动信号幅值增加的幅度比其他频带的要大。进而可以得出结论:频带[2 812.5,3 437.5]Hz内信号的RMS对变速箱的性能退化状态比其他频带更为敏感。
图24为t=887 h时传感器1#的频谱图(转速1 000 r/min,负载1 A),从中可以发现:频带[1 562.5,2 187.5]Hz内的平均幅值是最大的,频带[2 812.5,3 437.5]Hz内的平均幅值次之,这与前面的结论完全符合。
3.4.2 负载变化对主要频带的影响
负载变化情况下,时间点672,887和945 h传感器1#的总RMS如图25所示。从图25可以发现,变速箱负载相同的情况下, 系统运转时间越长,总RMS越大,两者成正比关系。变速箱运转时间相同的情况下,负载从0~0.8 A逐渐增加时,传感器1#的总RMS曲线也逐渐递增;当负载从0.8~1.4 A继续增加时,总RMS曲线呈递减趋势。
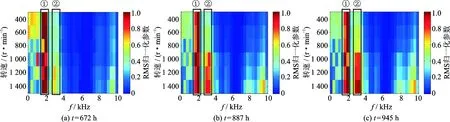
图23 转速变化情况下传感器1#的RMS归一化谱Fig.23 RMS normalized spectrum of sensor 1# in speed change case
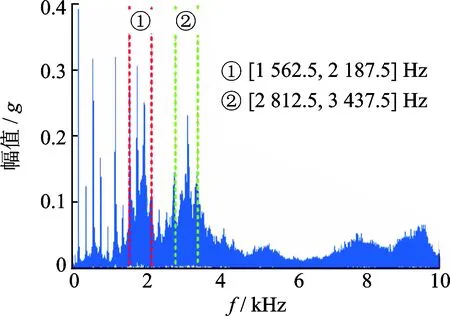
图24 传感器1#的频谱图(t=887 h)Fig.24 Frequency spectrum of sensor 1# (t=887 h)
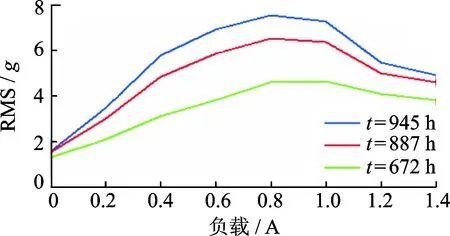
图25 负载变化情况下传感器1#的RMSFig.25 Total RMS of sensor 1# in load change case
时间点t=887 h时负载变化情况下传感器1#的RMS谱如图26所示,频带[1 562.5,2 187.5]Hz内的RMS一直是最大,频带[2 812.5,3 437.5]Hz内次之。负载为0.8和1.0 A时,各个频带的RMS
都是比较大的,这可能是因为实验台长时间在1.0 A的负载环境下运转,变速箱齿轮适应了这一负载时的啮合应力,当负载变化时,就出现啮合不足或啮合过紧,从而导致系统振动幅度整体降低。
图27(a)~(c)分别为时间点672,887和945 h时负载变化情况下传感器1#的RMS归一化谱,从中可得到与转速变化情况下(图23)类似的结论:行星变速箱振动信号的最高幅值峰群落于频带[1 562.5,2 187.5]Hz内,不会随着运转时间的变化或负载变化而发生移动;频带[2 812.5,3 437.5]Hz内振动信号的RMS对变速箱的性能退化情况比其他频带更为敏感。图23与图27的主要区别在于,转速变化情况下,各频带RMS与转速成正比;而负载变化情况下,各频带RMS在负载为0~0.8 A时与负载成正比,在负载大于0.8 A时与负载成反比。
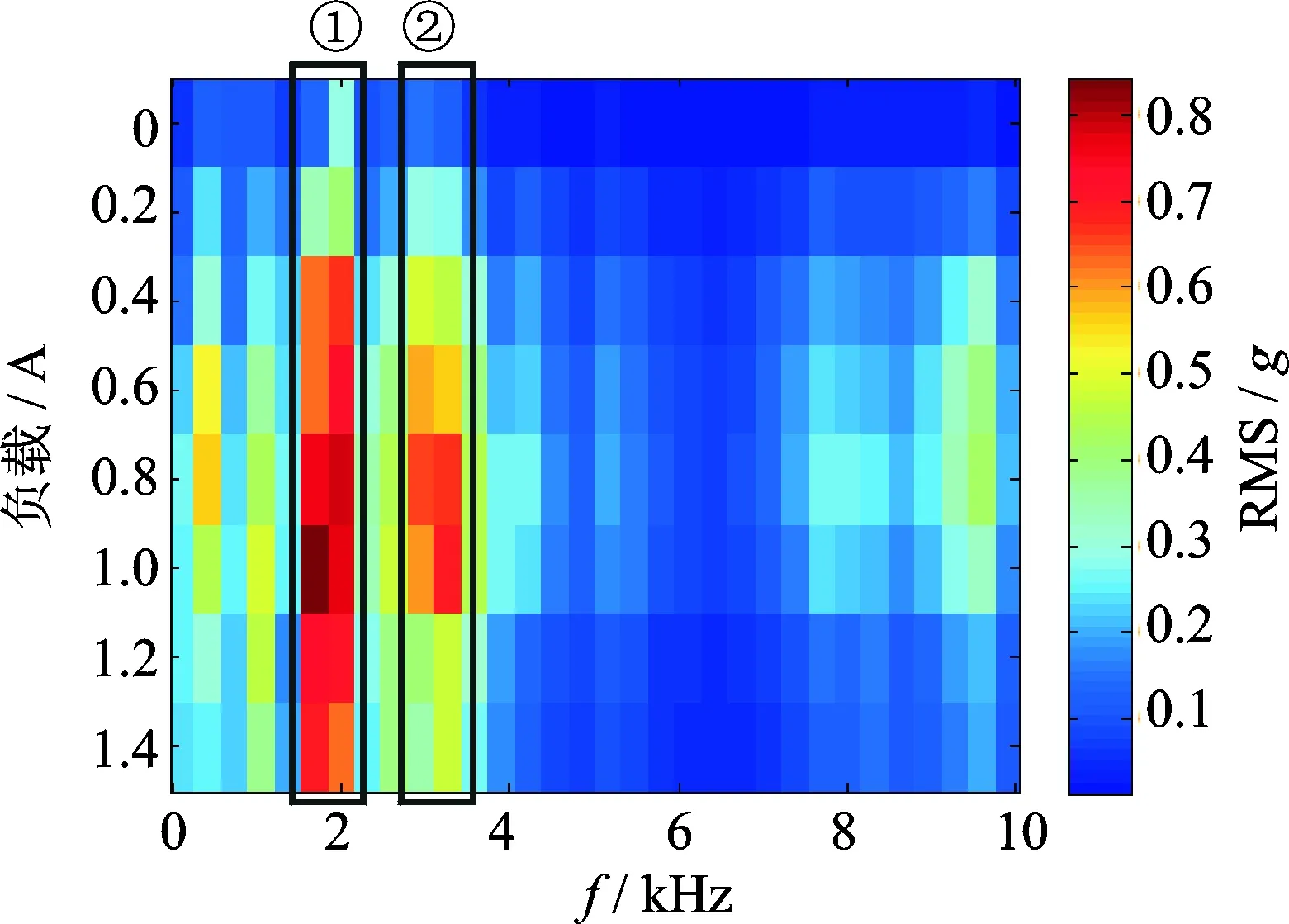
图26 负载变化情况下传感器1#的RMS谱(t=887 h)Fig.26 RMS spectrum of sensor 1# in load change case (t=887 h)
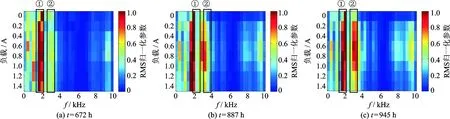
图27 负载变化情况下传感器1#的RMS归一化谱Fig.27 RMS normalized spectrum of sensor 1# in load change case
3.4.3 特征频带RMS趋势分析
转速变化和负载变化的分析都表明,频带[1 562.5,2 187.5]Hz在各种工况环境下的都能比较稳定地反应行星变速箱的退化情况,而频带[2 812.5,3 437.5]Hz对于行星变速箱性能退化情况是比较敏感的。对行星变速箱稳定工况下退化过程的传感器1#的RMS谱(图14)做归一化处理,得到RMS归一化谱(图28)和归一化参数(图29),可以发现,转速变化和负载变化情况下得到的结论对于稳定工况下的退化过程同样是适用的。而且频带[2 812.5,3 437.5]Hz的归一化参数在退化第1阶段相对比较稳定,在第2阶段和第3阶段增加较快,说明频带[2 812.5,3 437.5]Hz的信号主要是对加速退化阶段比较敏感。
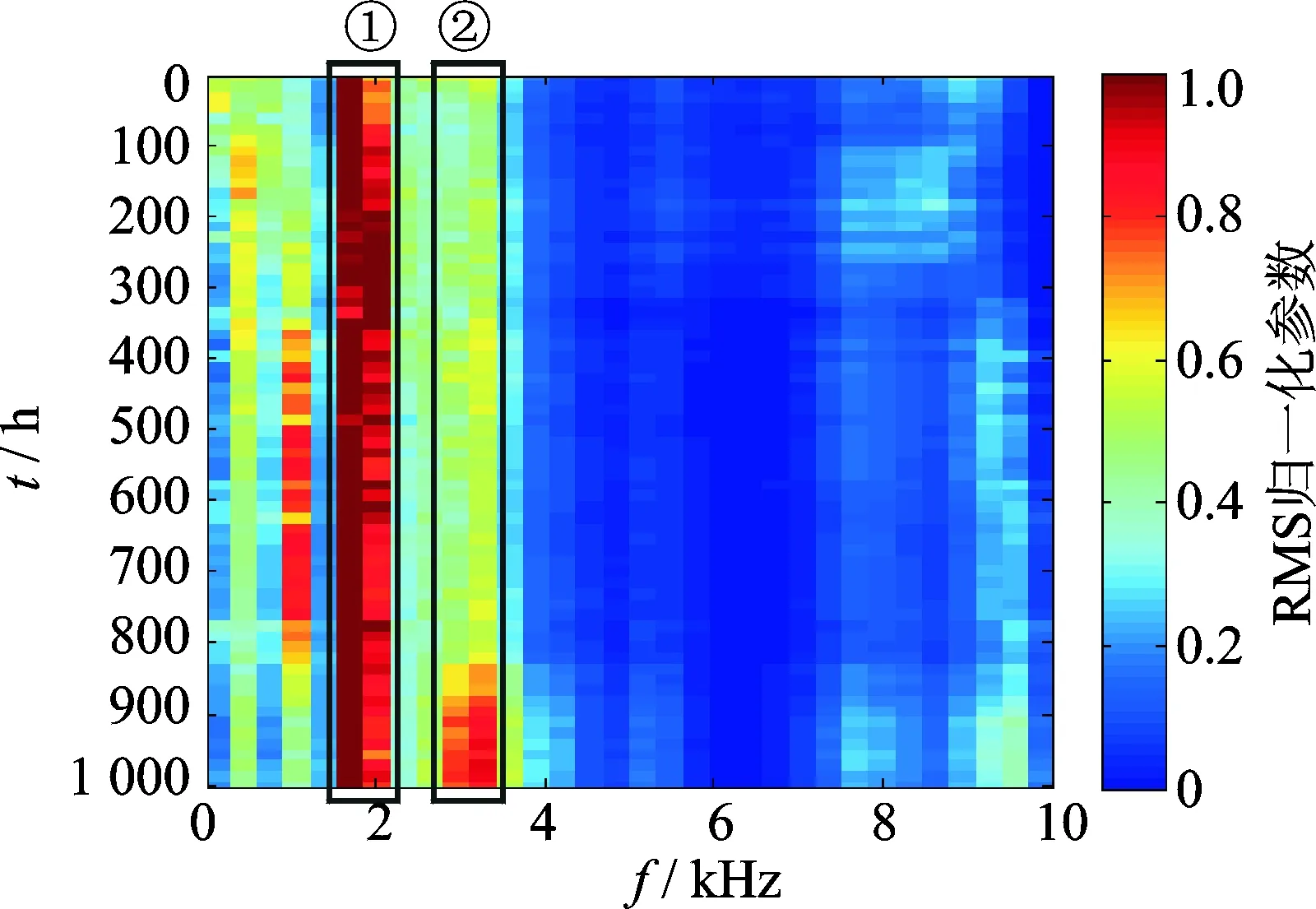
图28 稳定工况下传感器1#的RMS归一化谱Fig.28 RMS normalized spectrum of sensor 1# in steady working condition

图29 敏感频带的归一化参数Fig.29 Normalized parameter of sensitive frequency ranges
分别提取频带[1 562.5,2 187.5]Hz和[2 812.5,3 437.5]Hz的RMS,如图30和图31所示。频带[1 562.5, 2 187.5]Hz的RMS趋势在行星变速箱的整个退化过程一直比较稳定,呈线性趋势。频带[2 812.5,3 437.5]Hz的RMS趋势呈现三阶段趋势,在加速退化阶段RMS有比较明显的上升趋势。这些现象说明由RMS归一化谱分析得到的结论是正确的。
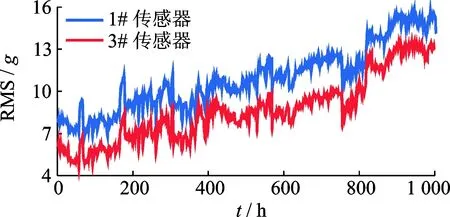
图30 频带[1 562.5,2 187.5]Hz的RMSFig.30 RMS of frequency range [1 562.5,2 187.5]Hz
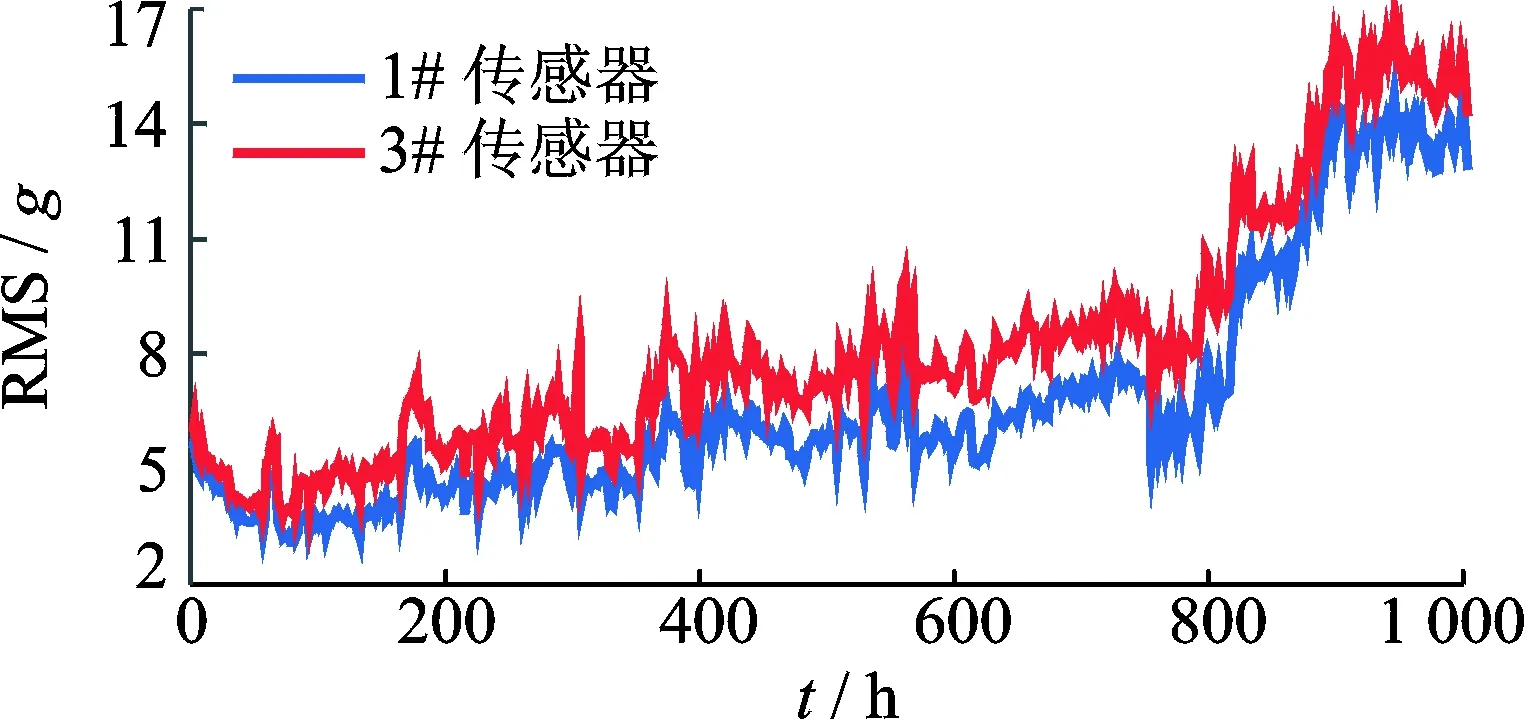
图31 频带[2 812.5,3 437.5]Hz的RMSFig.31 RMS of frequency range [2 812.5,3 437.5]Hz
4 结束语
为了研究行星变速箱的退化特征参数提取方法,在峭度谱的基础上提出能够同时从时域和频域分析系统退化特性的RMS谱。笔者研究了RMS谱及RMS归一化谱的原理与使用方法,并将其用于行星变速箱的退化特性分析中。基于RMS谱的退化分析能够得到行星变速箱退化过程的主要频带,并且这些频带的RMS趋势是不一样的,有的呈现为线性,有的呈现出与总RMS一样的3阶段特点,在退化趋势预测时可以根据需要选择趋势较好的频带特征参数;基于RMS归一化谱的退化分析能够得到行星变速箱退化过程的两个特征频带,其中一个能比较稳定地反应退化过程,另一个对加速退化阶段比较敏感,而且这两个特征频带对转速变化、负载变化和稳定工况三种情况都适用。所提出的RMS谱和RMS归一化谱能够有效用于行星变速箱的退化过程分析,提取得到适合退化趋势预测和退化状态监测的退化特征参数,并且效果较好。
