美国水下无人系统发展趋势分析
2019-05-08刘乐华赵蛟龙巩天成
刘乐华,赵蛟龙,巩天成
(北京机电工程研究所,北京 100074)
0 引言
随着科技的发展,以无人潜航器(UUV)、无人机(UAV)、无人水面艇(USV)和无人车(UGV)为代表的各类无人系统已成功应用于实际战场,极大地提高了作战效率。上述各类装备也将在未来现代化战争中扮演着越来越重要的角色。
自20世纪以来,美国就非常重视水下作战及水下无人系统发展,在规划与政策方面鼎力支持。近些年来,伴随着水声探测与通信、能源与推进、集成计算等技术的进步,其水下无人自主系统亦得到了飞速发展,正逐步成为水下作战的关键要素。本文将介绍美军水下无人系统的发展规划、发展现状及未来发展趋势[1-2]。
1 美国水下无人系统发展规划
美国对于无人系统研发的发展规划非常重视,也是目前全球唯一明确发布和不断更新相关规划的国家,并根据技术的发展,在规划中分阶段明确使命任务、能力要求及关键技术突破等具体目标。美军高度重视水下领域的战略价值,从装备、技术双重层面进行顶层筹划,系统牵引水下无人自主系统的发展。1988年,美国海军和国防预研局制定了无人潜航器发展规划,该规划的目的是要证明无人潜航器具有完成一些重要任务的能力。1988-1994年,美国海军研究单位以及有关大学、公司积极研究和开发无人潜航器相关技术,并进行了无人潜航器的水下通信技术、燃料电池推进技术和航行性能等多项海上试验,取得了很多宝贵经验。
1994年,美国海军和DARPA共同制定了一项名为《无人潜航器发展计划》的新一代先进无人潜航器的研制计划,旨在发展能遂行水下侦察、搜索、通信、导航、猎雷和反潜等任务的自主式无人潜航器。1996年,美国国家研究委员会向美国海军提交了《2000—2035年美国海军技术》咨询报告,认为采用UUV将使未来潜艇具有执行各种新使命的能力,包括进行远距离水雷侦察和定位、收集环境和作战信息、进行外部探测、布放海底传感器和进行声源定位等。为了能够满足海军的未来作战需求,美国海军还在不断地对其无人潜航器发展计划进行调整[2]。2000年4月,《无人潜航器发展计划》升级为《无人潜航器主计划》,系统全面地介绍了美国海军无人潜航器的发展现状、规划、实施方案和进度以及预算等内容,并提出了在未来战争中海军如何部署和整合无人潜航器并加以应用,确定了无人潜航器的7项任务:情报监视侦察、反水雷、海洋调查、通信导航、反潜战、武器平台、后勤补给与支援。该计划是在考虑了未来50年的需求情况下制定的一个中远期发展规划[3]。2002年6月,美国海军考虑到浅水和超浅水域水雷对抗的需求,以及海底爆炸物处置的需求,增补了一个《小型无人潜航器战略计划》,旨在发展能够满足上述需求的小型无人潜航器[4]。2004年9月,在已经取得初步成果和积累了大量发展经验的基础上,美国海军发布了第2版《无人潜航器主计划》,将无人潜航器的任务调整为9项,包括情报监视侦察、反水雷、反潜战、探察与识别、海洋调查、通信/导航节点、设备运送、信息作战和时敏打击,提出要研发便携式、轻型、重型和巨型4类无人潜航器。需要关注的技术问题包括能源和推进、通信、传感器、数据处理、导航、计算机软件、人工智能与决策。该计划是一个全面指导美国海军无人潜航器发展的蓝图[5]
在2004年发布了《无人潜航器主计划》、2007年发布了《无人水面艇主计划》后,美国军方开始统筹各军种无人系统的发展,从2007年开始每隔2年统一发布一版《无人系统综合路线图》。2013年12月25日,美国国防部发布最新一版《无人系统综合路线图——2013—2018财年无人系统综合路线图》。路线图以军费预算持续紧张、“重返亚太”作战环境为背景,从研发、生产、试验、作战使用和后勤保障等方面,提出了无人系统未来25年的发展愿景和战略;进一步肯定了无人系统在未来战争中的作用,将无人系统定位为“在各种突发事件和所有作战领域的主力,在联合作战中帮助决战力量有效完成任务,是未来成功的关键”;对关乎无人系统作战能力的“互用性、自主性、通信、安全性、使用性、武器化”6大关键技术领域的发展现状、存在问题、未来发展方向进行了细致剖析,提出了提高可承受性、强化训练、改进后勤保障的思路和措施。路线图还列出了最近5年海上无人系统的总体统预算情况,总体上海上无人系统的研发经费仍在上涨,维护经费呈不断增长的趋势也从侧面反映了海上无人系统的应用正不断增多[6]。
2015年,美国战略与预算评估中心(CSBA)发表了《水下战的新时代》报告,文章认为美国的防御战略在很大程度上依赖其水下战优势,但面临越来越多的国家所部署的反介入/区域拒止(A2/AD)系统威胁,需要在新时期利用水下领域的新方法,以保证美国在拒止敌人利用水下的同时还可以保持美国的军事优势。美国认为新兴的探潜与反探潜技术、续航时间和隐身能力增强的水下平台、新型武器和传感器以及通信系统等领域的长足进步,将彻底改变水下作战。美国期望利用技术发展的新机遇,以无人平台和装备等形式,加紧研发和部署新的水下无人自主系统,重新考虑潜艇的作战定位并发展新的反潜战战法,以保持美国在水下战方面的优势。
2016年,针对水下无人自主系统,美国海军在政府国防预算中获得了大量的资金支持:一方面继续深化规划中相关装备的发展,另一方面是用于扩大无人潜航器编队的规模。经过20余年的发展,美国在研且已经装备了多型水下无人潜航器,覆盖各种排水量和动力类型,用途涵盖海洋环境调查、侦察与反水雷、察打一体化等任务。2016年9月,美海军水下战首席技术官签署发布了《水下战科学与技术目标》,该文件以《2015年海军科学与技术战略》为基础,对2013年版的文件内容进行了更新,提出了10个重点领域的科学与技术目标。其中第2大领域即“自主性与无人系统”,阐述“自主性与无人系统是促进多领域作战的关键力量倍增器,将广泛应用于水下战领域”。
2 美国水下无人系统发展现状
2.1 美国水下无人系统概况
美国军用水下无人系统的研究一直处于世界领先水平,美国上世纪即制定了发展水下无人系统的科技计划,提出了包括“近期水雷侦察系统”(NMRS, Near-term Mine Reconnaissance System)和“远期水雷侦察系统”(LMRS, Long-term Mine Reconnaissance System)等研制计划,其中,NMRS于1998年就已列装部队,作为攻击型核潜艇的配套装备。21世纪初,美国海军提出了2030年之前水下无人系统的发展规划,规划中提出的军用水下无人系统的7种使命包括:情报/监视/侦察(ISR)、反水雷措施(MCM)、气象学和海洋学、辅助通讯和导航、反潜战(ASW)、自治武器平台、后勤支援和补给;水下系统的4种作战能力为海上侦察能力、水下搜索和测量能力、辅助通讯/导航能力和潜艇跟踪及循迹能力。美国海军对水下系统提出了9种使命,包括:情报/监视/侦察(ISR)、反水雷措施(MCM)、反潜战(ASW)、观察与识别、海洋学、通讯和导航网络节点(CN3)、载荷输送、情报战和时敏目标打击(TCS)。为了完成上述几种使命中要求的作战任务,美军提出了发展4种不同级别的水下无人作战装备,将其按照直径、排水量、续航力及有效载荷等不同划分为以下几种[7]:
1)便携式:直径约0.076~0.23 m之间,排水量小于50 kg,高负荷下续航能力约10 h,低负荷下续航能力约10~20 h。
2)轻型:直径约0.32 m左右,排水量226 kg左右,一般高负荷下续航能力约10~20 h,低负荷下续航能力约20~40 h。
3)重型:直径约0.5~0.7 m左右,排水量小于1 360 kg,高负荷下续航能力约20~50 h,低负荷下续航能力约40~80 h。
4)巨型:直径大于0.91 m,排水量9 000 kg左右,高负荷下续航能力约100~300 h,低负荷下续航能力大于400 h。

图1 美国无人系统装备体系及典型代表Fig.1 Department systems and typical representatives of US unmanned undersea systems
2.2 美国典型水下无人系统
2.2.1 “金枪鱼”系列无人潜航器
“金枪鱼”无人潜航器(Bluefin)于1989年由美国工学院自治式潜航器实验室研制成功。1997年,“金枪鱼”项目组从麻省理工学院分离出来,成立金枪鱼机器人公司,专门负责“金枪鱼”系列无人潜航器的开发与销售。该公司从小型无人潜航器“金枪鱼-9”型起步,相继开发了“金枪鱼-12”、“金枪鱼-21”等型号,主要用于深海探测、地图绘制、海底勘测及各类军事试验和应用。“金枪鱼”系列无人潜航器各型号均采用标准组件设计,维护简单,可根据不同用途配备不同负载,与其它同类型产品相比,还具有导航精度高、操作简单方便、可靠性高等优点[8]。
2.2.2 “遥控环境监视单元”系列无人潜航器
20世纪90年代末,伍兹霍尔海洋研究所成功研制出REMUS100轻量级无人潜航器,此后,为更好地研发与推广REMUS100,该项目组从伍兹霍尔海洋研究所中独立出来,于2001年成立了海德罗伊德公司,并将REMUS技术授权给该公司进行市场推广和产品研发[9]。随后,针对反水雷、深海探测、管道检测等任务需求,伍兹霍尔海洋研究所先后开发出REMUS600、REMUS6000、REMUSTIV等多型产品,均由海德罗伊德公司负责推广,在学术界和商业界均取得巨大成功,并被各国海军广泛运用。
2.2.3 潜载重型无人潜航器
美国海军至今发展了“近期水雷侦察系统”(NMRS)、“远期水雷侦察系统”(LMRS)、“任务重组式无人潜航器”(MRUUV)、“大直径任务重组式无人潜航器”(LDMRUUV),共4型计划装备攻击型核潜艇的无人潜航器。
“近期水雷侦察系统”研制于20世纪90年代,是一种遥控式无人潜航器,通过光纤与母艇连接。由于“近期水雷侦察系统”不能满足美国海军的需求,美国海军于1999年开始研制“远期水雷侦察系统”以取代“近期水雷侦察系统”。“远期水雷侦察系统”原计划于2005年服役,但由于其只能执行1种类型的任务且成本太高,最终被军方终止。随后,美国海军开始研制“任务重组式无人潜航器”,但由于能源与有效载荷系统受到尺寸限制,于2009年开始转而发展“大直径任务重组式无人潜航器”。另外,作为先期探索,美国海军还发展了“曼塔”型无人潜航器。
2.2.4 “滑翔者”系列无动力无人潜航器
“滑翔者”系列无人潜航器(Glider)是一种可以自动调整浮力的自主式无人潜航器,通过改变浮力实现上浮或下潜,确定合适的下潜或上浮角度后,两翼和艇体垂直方向的机动能够转化为向前的“锯齿状”水平机动。高度计和压力计能使无人潜航器在海底或特定的高度处开始上浮,收集传感器数据。经过预先编制好的任务,无人潜航器周期性地浮出水面,将天线露出水面。随后,无人潜航器通过“铱星”等通信方式发送数据,并接收新的指令,同时接收GPS导航信息,校准自身位置。Glider系列无人潜航器能够以编队的形式执行任务,满足空间和时间的任务需求,或沿回旋曲线航行,或模拟系泊。
与其他水下航行器相比,“滑翔者”系列无动力无人潜航器的体积小、重量轻、能源利用率高,具有作业时间长、航行距离长、布放回收简便、成本低等优点。由多个“滑翔者”组成的观测阵列可以进行大范围、长时间的同步观测等。美国已经形成多种型号装备,部分已经实现产品化。
3 美国水下无人自主系统发展趋势
3.1 水下无人系统趋于多样化和跨域化
随着现代战争特点发生变化,水下装备承担的使命任务逐步细化,水下无人自主系统的种类、功能趋于多样化和跨域化,仿生、深海预置等新兴技术被重视及采用。常规水下无人自主系统的实际应用趋于成熟化,承载新型使命的无人系统研发在持续推进,规划的系列化平台正在逐步落实。对于水下无人潜航器,美国根据作战使命的不同,规划了“微、小、中、大”尺寸UUV的发展思路,并在各级支持下逐步落实。
美国海军在2016年1月宣布,已经在华盛顿州普吉特湾的海军水下作战中心基波特分布开展了一系列测试和演示,且美海军研究局(ONR)计划于春季开始对长航时、大排量无人潜航器LDUUV进行1 600~2 000 km的无人自主航行测试。LDUUV属于美国近期正在研发的一种新型水下无人潜航器。新型水下无人作战平台将“水下”、“无人”、“平台”3个要素紧密结合,将功能聚焦于载荷的部署发射,其创新的作战概念获得了广泛的关注。作为一个潜在的导弹发射/运输、作战平台,新型水下无人作战平台将给未来战争带来不可忽视的影响[10]。
仿生技术的进步,使得模仿海洋鱼类的新型水下无人系统概念正在成为现实,其具有区别于传统潜航器的典型优势,将是未来水下作战的“奇兵”。在海洋生物遍布的水下空间,模仿自然生物来开发水下无人自主系统,充分借鉴其游动过程推进效率高、机动能力强、噪声与海洋背景融为一体等特点,执行特种侦察、隐蔽打击等任务,具有天然的优势。美国海军在小溪-斯多利堡联合远征基地(JEBLCFS)完成了对新型无人潜航器——“幽灵泳者”(Ghost Swimmer)的水中测试。“幽灵泳者”是海军作战部长快速创新单位(CRIC)计划Silent NEMO项目所开发的一系列“科幻变现实”的最新成果,其目的在于探索应用仿生技术研制无人潜航器。值得一提的是,海军CRIC计划的主要目的是将快速发展的新兴技术应用于海军面临的最艰难的挑战,并用最快的方法将其应用。
利用深海为背景,长时间隐蔽潜伏的预置式无人系统,凭借其极高的作战效费比和灵活的使用模式,正在成为发展的热点之一。针对在焦点海域前沿部署、长时间隐蔽潜伏、即时唤醒后侦察与打击等能力需求,催生了一类特殊的水下无人自主系统。典型的系统包括美国DARAPA提出的“九头蛇”(HYDRA)项目和“深海浮沉有效载荷”(Upward Falling Payloads UFP)项目[11]。2016年,美国DARPA透露该项目目前已经完成“概念设计”、“样机开发”2个阶段的工作,正在进行第3阶段,即开展演示验证试验。
凭借潜射无人机等装备,水下无人自主系统的能力范畴正在突破单一的水下空间,实现跨域感知和打击。为了在信息层面实现跨域、增强水下感知能力,美国海军先后研发多型潜射无人机,并通过大量的飞行试验和演习,验证了潜射无人机的功能。其不但为传统潜艇提供了超视距的信息支援,更可装载于正在发展的深海预置平台中,为水下无人自主系统提供目标指示等核心信息。美军已开始研制“XFC”、“弹簧折刀”等潜射无人机,采用运载器在水下实施干式发射。其中“XFC”采用全电力、燃料电池动力,可通过鱼雷发射管发射。
2016年5月,美国海军学会网站报道称海军选择航空环境(AeroVironment)公司的“黑翼”(Blackwing)微型无人机。该无人机继承了公司便携式无人机“折刀”无人机的相关技术,能与潜艇通信并通过Link 16数据链向其它飞机提供目标信息,也能配备武器为在近岸作战的潜艇提供附加帮助。其不但可搭载于潜艇,亦可从海底载具中发射,实际上是为深海预置平台提供了一种可搭载载荷。
3.2 水下无人系统趋于组网化和协同化
美军不再强调追求单个水下无人平台功能的最大、最强化,通过系统集成手段,将单一复杂系统的功能分布化,通过组网、集群形成分布式作战能力。美国国防部近年来一直在关注系统集成(SoS)方法的研究,DARPA已经开始了一大批旨在开发和验证“系统集成”系列技术的项目,使具有各种能力的分布式资源通过协调部署而一起发挥作用,大幅提高对抗强敌的能力。这些项目的关键在于一种新方法——“把新能力集成到现有系统中,以实现针对强敌的成本杠杆,并连续地以更低成本、更快速地取得进展”,而不是传统的整体式基于平台的方法。通过上述系列项目的研究,DARPA为取得未来空中优势奠定了重要技术基础。现在,DARPA正在通过“跨域海上监视和瞄准”(CDMaST)项目,把这一模式推广到海洋疆域。2016年5月,DARPA在五角大楼主持的2016年演示日上,公开了该项目,旨在将作战功能分解并分配到低成本终端系统上,构建海上的SoS,获得美国的海上优势[12]。
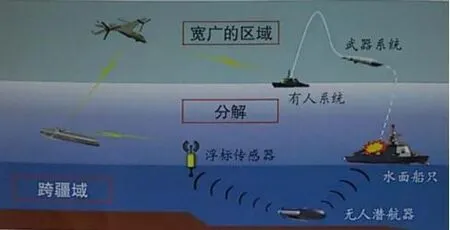
图2 跨域海上监视和瞄准项目Fig.2 CDMaST
水下“集群”作战通过信息链路将水下无人自主系统组网,是实现能力倍增、更好解决特定问题的有效途径。美国《国家利益》网站2014年发表的文章《构建蜂群:美国制胜战场的秘密武器》中阐述,如果美军想要保持技术优势,需要充分发挥机器人技术革命优势,构建无人自动化“蜂群”作战系统。实际上,这一思想已在水下无人自主系统应用中得到体现。
一个典型的应用范例是DARPA投资研发的分布式敏捷反潜系统(DASH)中潜艇风险控制(SHARK)子系统[13]。该系统由携带主动声呐的多个水下无人自主系统组成,通过信息中继单元实现组网,以集群的方式工作于深海区域,可通过接力方式或者是形成探测栅栏,以更强大的能力实现对敌方潜艇的探测。至2016年5月,该系统已完成海试,研究工作趋近尾声。
3.3 水下无人系统趋于模块化和标准化
目前的无人潜航器大多只能执行单项任务,例如美国“远期水雷侦察系统”等只能执行反水雷任务且成本高昂,造成浪费,因此项目被终止。2005年美国海军项目执行办公室(PEO)正式采用JAUS信息格式和数据协议作为其无人潜航器、无人水面艇和无人陆地车的通信标准。无人系统联合体系结构(JAUS)是一套适合控制所有类型无人系统的标准化信息,已经由国防部批准,用来提高操控站、无人航行器及其有效载荷之间的互操作性。2006年ASTM委员会发布了ASTM F2594-07标准,用于指导无人潜航器基本的通信需求,并影响无人潜航器采办、艇体与有效载荷和通信系统的集成的设计和开发过程。其中,这一标准发布的初衷是解决美国海军计划的53.3 cm任务重组无人潜航器(MR无人潜航器)的通信标准需求,这表明了美国海军在无人潜航器通信标准化方面的决心。同年,美国海军完成了无人潜航器技术标准的制定,主要内容包括自动化、任务载荷、传感器数据格式、通信技术4个方面。该标准的出台,可使工业部门集中精力进行无人潜航器模块化载荷的开发上,而不必再将重点集中在新型无人潜航器的设计上[14]。
4 结束语
美国已通过政策、装备、技术等多方面的先期布局,并高度重视水下领域的战略价值,从装备、技术双重层面进行顶层筹划,系统牵引着水下无人自主系统的发展,支撑了水下无人自主系统的全面发展。美军水下无人系统呈现出多样化跨域化、组网化协同化、模块化协同化的发展趋势。
