集成霍尔开关传感器液体黏度测定仪的设计与测试
2019-05-07贾晓倩张凯悦李秉阳陈英杰
贾晓倩,张凯悦,李秉阳,陈英杰
(曲阜师范大学 物理工程学院,山东 曲阜 273165)
液体黏度,是描述表征黏滞性强弱的物理量[1]. 黏度的测定,对于预测产品生产过程的工艺控制、输送性以及产品在使用时的操作性,具有重要的指导价值,在印刷、医药、石油、汽车等诸多行业有着重要的意义. 测量液体黏度有多种方法,如落球法[2-4]、升球法[5]、转筒法[6]、毛细管法[7]等. 对于黏度较大的液体如蓖麻油、甘油,常采用落球法测量. 在落球法实验中,对小球下落时间可用手动秒表计时、光电门计时[8]、CCD拍照计时[9]等,但这些手段只适用于透明液体的测量. 为了克服现有实验装置无法测量非透明液体黏度的不足,该改进实验引入了高灵敏度的集成霍尔开关型传感器,并与自制的计时器相结合,实现了感应-计时功能.
1 实验原理
沿容器中心轴线方向,质量为m、体积为V的小磁球下落在密度为ρ的黏性液体中,随速度的增加黏滞阻力变大,重力、浮力和黏滞力很快平衡,加速度为0,小球将以恒定速度v匀速向下运动,根据理论公式可求得液体黏度为
其中,d是小球的直径,D为容器内径,H为液柱高度,L为小球匀速下落的距离,t为小球下落L距离所用时间,λ1=2.40,λ2=1.65(复旦大学物理实验教学中心提供数据).
2 传统黏度实验的弊端
传统的黏度测定实验一般是通过肉眼观察和人工秒表计时,找到小球匀速下落的一段距离并测量小球在该距离下落的时间. 由于存在视差和反应误差,对小球下落时间测量不精准,而且需要较高的容器,对待测液体需求量大,实验成本高. 根据实验原理,只有当小球沿容器的中心轴线下落时,小球球面的液层与周围其他液层的相对速度才会相同,但在传统的实验过程中,实验者需根据经验将小球在容器口的中心位置释放,很难精确地让小球从容器的中心轴线上下落,实验成功率低,另外,实验装置没有密封,实验材料易污染变质.
3 改进方法
改进的实验装置如图1所示,待测液体装在细长的有机玻璃管中,管上套有A和B结构组成相同的感应板,感应板上有便携式水平仪(可对其调水平). 每个感应板上固定有4块电路板,每块电路板上装有高灵敏度的集成霍尔开关传感器和LED感应指示灯,其中1块电路板上有1片逻辑与门芯片. 4个集成霍尔开关传感器紧贴管壁边沿排列在同一圆周上,间隔90°,提高测量准确度. 实验中的小球为强磁性小球(材料为钕铁硼),当磁球经过感应板时,只要4个传感器中的任意1个感应到磁场即输出低电平,其对应的LED指示灯会熄灭1次. 4个传感器的信号均经过1片逻辑与门输出,驱动计时器工作. 感应部分电路如图2所示.
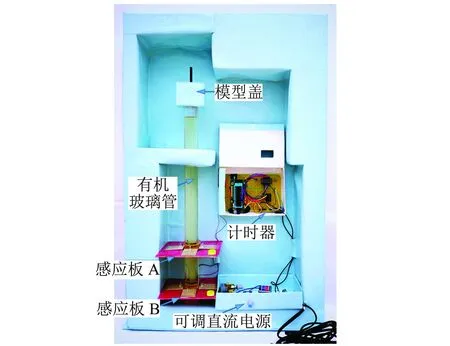
图1 实验装置
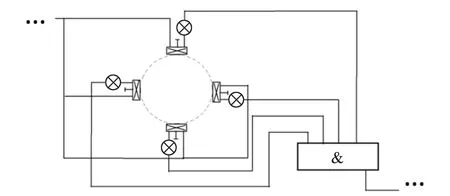
图2 感应部分线路图
自行设计并制作的计时器电路图如图3所示. 该计时器的系统程序由主程序、定时中断服务程序、外部中断0服务程序和外部中断1服务程序4部分组成,结合STC89C51单片机、4位共阴极数码管、译码器等,能实现0~99.99 s的计时功能,计时精度为0.01 s. 计时器的P3口外接感应板A,B和无锁开关,分别控制计时的开始、暂停和复位.
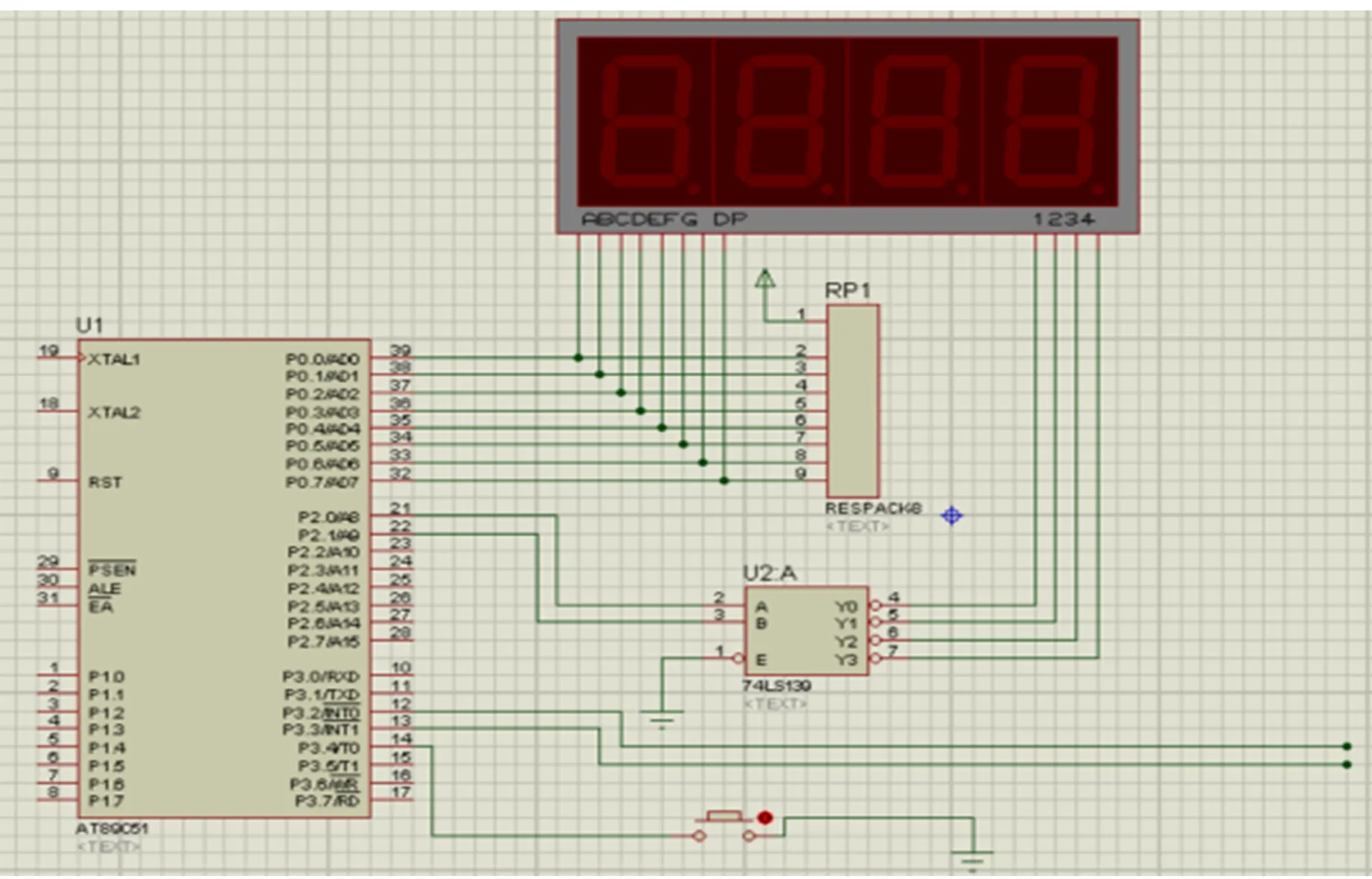
图3 计时器电路图
为了使小球精准地沿容器的中心轴线下落且避免拉杆移走过程中方向偏差对小球造成的影响,制作了如图4所示的模型盖. 与玻璃管口相匹配的圆盖恰好卡在模型上,模型的中心轴线上穿过铁质拉杆,与盖子的中心相接触. 实验时,被待测液体浸润过的磁性小球通过铁杆吸附在盖子的反面中心处,将铁杆沿模型竖直拉起,小球失去磁力作用后,沿着容器的中心轴线下落,进入液面. 在非实验阶段,将盖子留在管口,防尘防污染,提高实验材料利用率. 另外,在回收小球时,如果直接伸入液面会对待测液体造成污染,因为实验小球为磁性球,可以借助铁块沿玻璃管外壁吸附出小球.
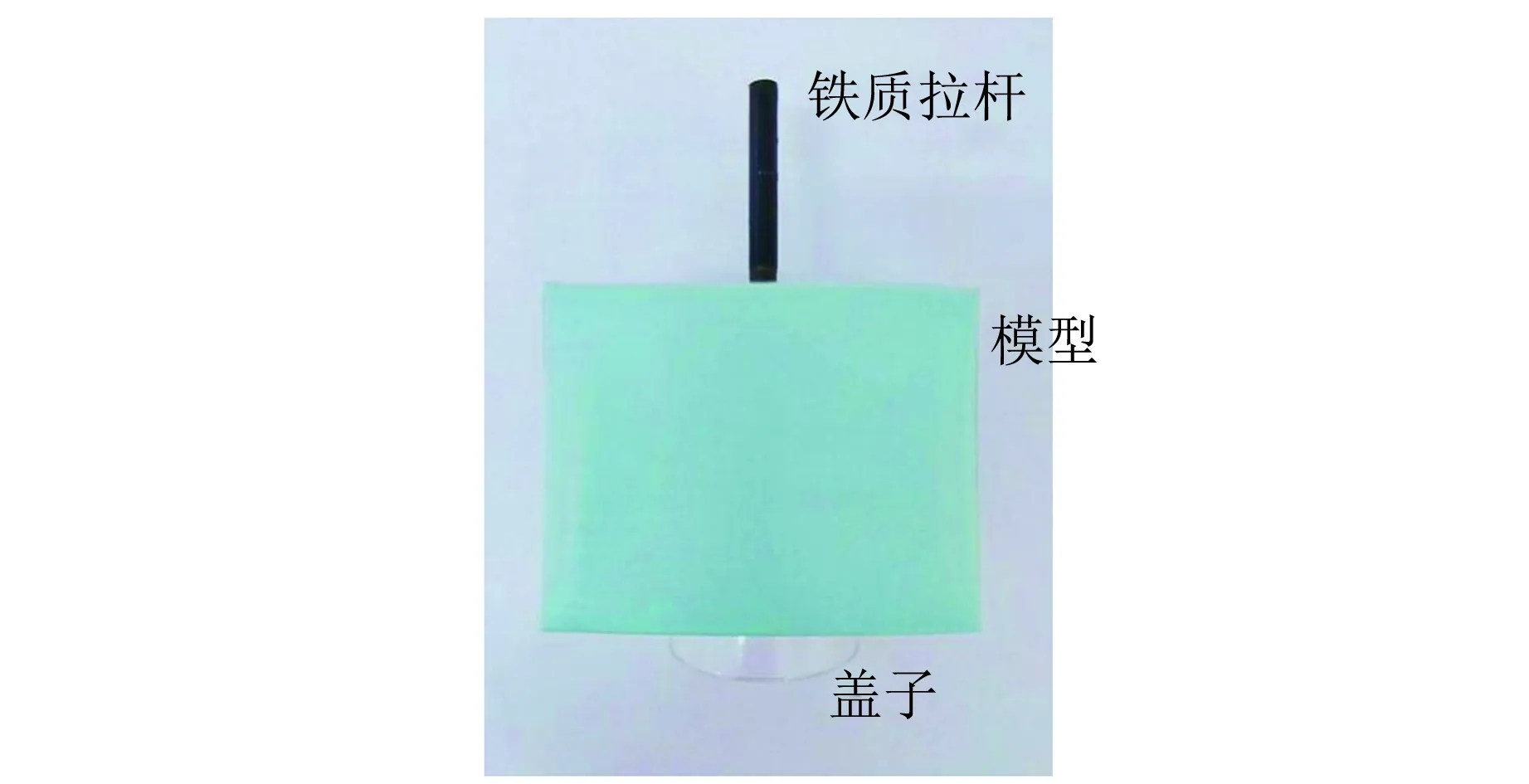
图4 带铁质拉杆的模型盖
供电部分,由于计时器和电路板上的电子器件都需要低值直流电压,因此制作了LM317可调稳压电源,该装置可将220 V的交流电压经过电源变压器、整流电路、滤波器和稳压电路变压为3~12 V直流电压. 电源电路图如图5所示.
在投入实际实验教学使用时,可将装置整合为3部分(装置设计如图6所示):
1)容器架(感应板可上下自由移动,容器套在2板上的中心孔里,再用容器夹固定);
2)单片机计时器;
3)可调直流电源.
将本作品整合后制成的实验装置,既克服了传统实验室装置的诸多弊端又具有搭建快捷、移动方便等优势,可广泛应用于各高校实验室,替代原有液体黏滞系数测定实验装置.
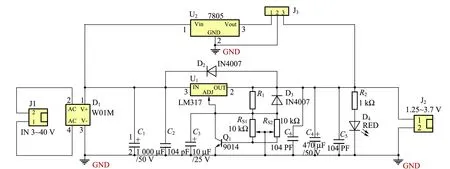
图5 电源电路图

图6 实验装置设计图
4 实验数据
实验以蓖麻油和洗发液(乳白色非透明液体)为待测液体,测量其黏度.
4.1 透明液体黏度的测量

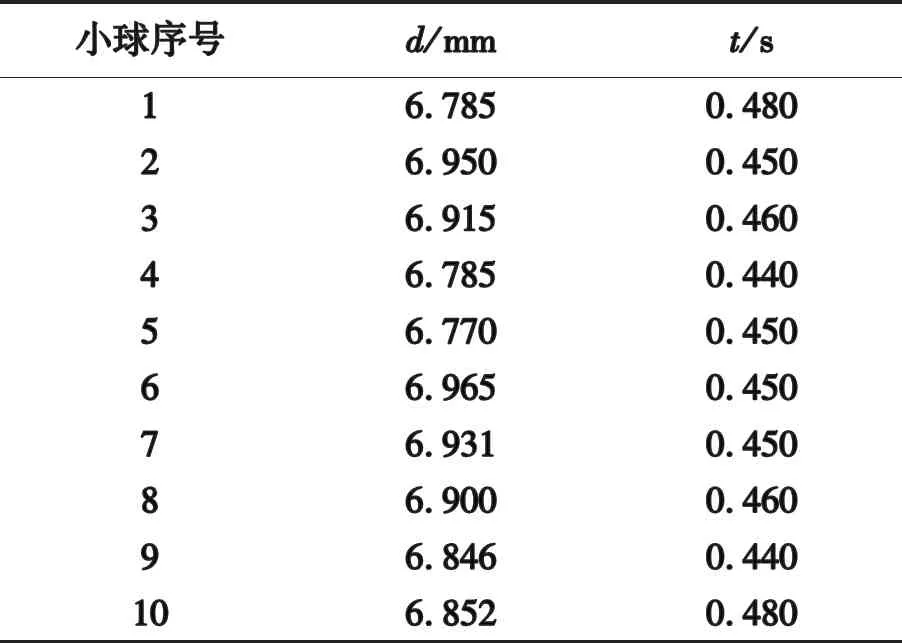
表1 蓖麻油温度为29℃时小球的测量数据
由理论公式计算出蓖麻油的黏度为η=0.494 1 Pa·s,与其标准值[10](如表2所示)相比偏差Er=5.1%. 改变蓖麻油温度,测量不同温度下的黏度,测量结果如表3所示. 蓖麻油黏度随温度变化情况如图7所示.
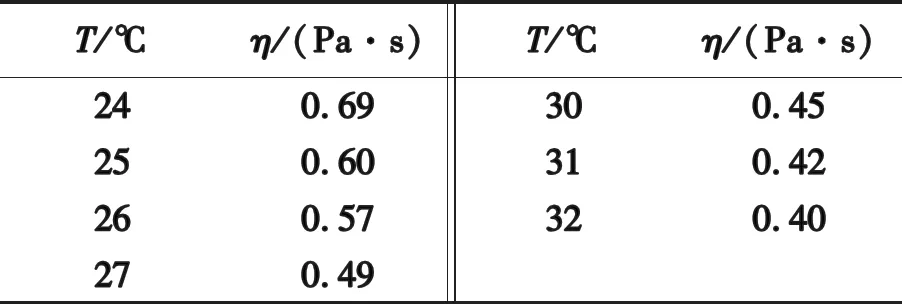
表2 不同温度下蓖麻油黏度的标准
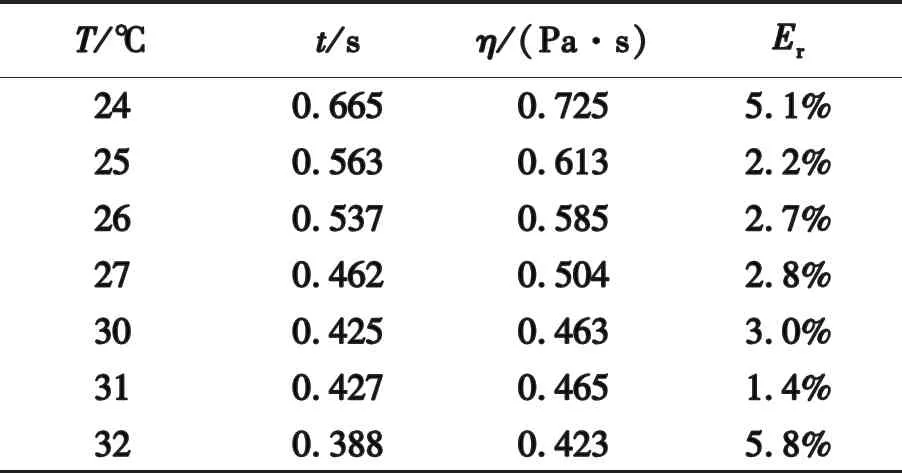
表3 不同温度下蓖麻油的黏度测量结果
4.2 非透明液体黏度的测量
利用该装置,用与上述实验相同的方式,测量了非透明洗发液的黏度.
某洗发液的密度ρ=1.15×103kg/m3,温度T=31 ℃,量筒直径D=30.01 mm,液柱高度h=46 cm,小球质量平均值m=1.3 g,匀速下落区间L=10 cm,平均下落时间t=15.638 s,测得洗发液黏度η=16.546 Pa·s.
5 结束语
相比传统实验人工视觉观察小铁球下落位置计时,该设计利用小磁球的磁信号通过集成霍尔开关传感器转化成数字信号输入自制的计时器来计时,避免了传统实验中存在的误差,并实现了对透明和非透明液体的黏度均可以测量. 在容器顶部加装中心带铁质拉杆的盖子,既能控制小球精准的沿容器的中心轴线下落又能防尘防污染;不再需要高大的容器盛放待测液体,实验成功率高,成本低. 在用落球法测量液体黏滞系数的同时融入集成霍尔开关实验,应用数字电路、模拟电路、单片机等方面的知识,在实际教学过程中,能激发学生探索兴趣,引导学生多方位学习.