磁悬浮转动演示仪的设计与测试
2019-05-07高琳惠阎泽琛高琳然程蒙蒙张静茹陈英杰
高琳惠,阎泽琛,高琳然,程蒙蒙,张静茹,陈英杰
(曲阜师范大学 物理工程学院,山东 曲阜 273165)
磁悬浮因被悬浮体和磁悬浮支架之间不存在相互的接触,克服了由于摩擦带来的能量消耗,因此利用这一技术做成的器件具有长寿命、无污染、无噪声、能耗低、安全可靠等优点[1-3]. 目前各国已广泛地开展磁悬浮控制系统的实验与理论的研究[4-5]. 磁悬浮技术不仅可以应用于磁悬浮列车,而且在磁悬浮轴承、磁悬浮飞轮储能、航天器与电磁炮的磁悬浮发射、磁悬浮精密平台、磁悬浮冶炼等方面也有广泛的应用[6-7]. 为了能够准确直观地展现磁性悬浮体的悬浮、旋转和由旋转到静止稳定悬浮状态的转变等现象,使学生更深刻地理解磁悬浮原理及通电线圈外部磁场的相关性质,体验与感悟物理学的魅力,培养学生应用知识的意识,提高学生的实践和创新能力,研制了磁悬浮转动演示仪,以此作为开发相关教学教具的载体.
1 演示仪的工作原理
图1为磁悬浮转动演示仪的正面和背面.
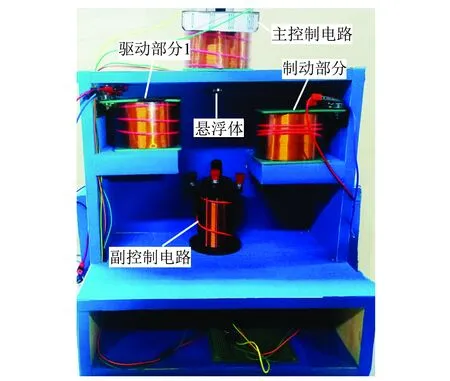
(a)正面
(b)背面
实验装置的结构如图2所示,其中,L1~L4为电磁铁,M为钕铁硼磁铁,V1为直流稳压电源,V2~V4为可调稳压电源. 演示仪主要由主控制电路、副控制电路、驱动部分和制动部分组成,4部分电路中电磁铁的磁场分别以不同方式作用在磁性悬浮体上,实现对磁性悬浮体状态的控制.

图2 实验装置结构示意图
1.1 主控制电路
主控制电路主要依靠位移传感器探测磁性悬浮体的位移,并由传感器输出的位移信号控制电磁铁的磁力,实现一定质量范围磁性悬浮体稳定悬浮. 该部分电路主要由电磁铁L1(可通过调整铁芯在电磁铁内的高度控制其磁性)和功率放大部分组成. 如果磁性悬浮体M(N极靠近传感器)在平衡位置有向下的位移,即磁性悬浮体与传感器IC2之间的距离增大,则传感器输出电平降低. 由于传感器的输出端接在比较器IC1的同相端,通过控制电路对同相端和反向端的输入电压比较,比较器输出低电平,场效应管VT低电平开启,电磁铁L1磁性增大,从而把磁性悬浮体拉回平衡位置.
同理,若磁性悬浮体在平衡位置有向上的位移,传感器的输出电压增大,使得比较器同相端和反相端的输入电压相近,比较器输出高电平,场效应管关闭. 电磁铁L1中的电流流经二极管VD形成回路,电流缓慢减弱,电磁铁L1磁性减小,由于重力作用,磁性悬浮体被拉回平衡位置.
1.2 副控制电路
由于电磁铁L1的线圈匝数一定且其所能承受的电压一定等因素,对磁性悬浮体的质量范围有一定限制. 为了扩大磁性悬浮体质量的范围,设计了副控制电路.
副控制电路主要由电磁铁L2和可调稳压电源V2组成. 当磁性悬浮体质量过小或过大时,副控制电路对磁性悬浮体施加向下或向上的力,使磁性悬浮体重新达到受力平衡.
借助副控制电路,可以通过以下2种方法来实现悬浮体的受力平衡:
1)固定电压,改变高度. 当电磁铁L2两端的电压一定时,它产生的磁感应强度一定. 若磁性悬浮体有向上的趋势即F1>G+F2,则给电磁铁L2向上的位移,使F2增大,达到平衡效果;反之亦然.
2)固定高度,改变电压. 当电磁铁L2的高度一定时,则通过改变其两端的电压而改变F2. 若磁性悬浮体有向上的趋势即F1>G+F2,则增加电磁铁L2的电压以增大F2,达到平衡效果;反之亦然.
1.3 驱动部分
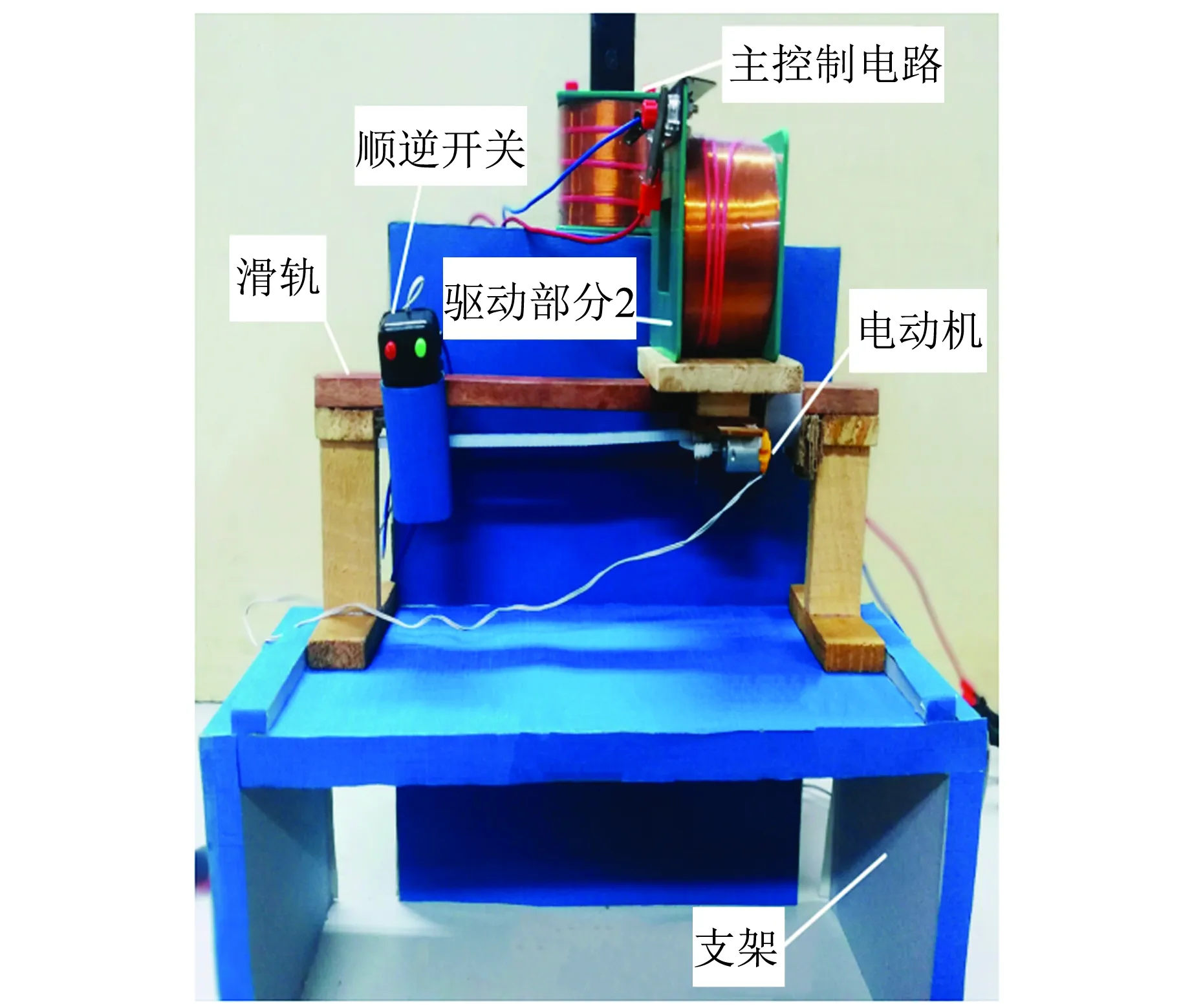
为了能更好地控制磁性悬浮体的悬浮状态,在装置中添加了驱动部分,其中,驱动部分1如图2所示,驱动部分2如图3所示.

图3 驱动部分2
驱动部分1利用通电线圈的外部磁场使磁性悬浮体实现旋转. 其主要由电磁铁L3和可调稳压电源V3组成. 电磁铁L3通电后产生的外部磁场,使磁性悬浮体受到旋转力矩的作用,同时电磁铁L3给磁性悬浮体向上的分力,此时磁性悬浮体产生微小的向上位移,使磁性悬浮体势能增大,当关闭电磁铁L3的电源时,磁性悬浮体回到原来的位置,该部分势能转换为磁性悬浮体的转动动能. 由于惯性及磁悬浮无接触、无摩擦磨损的特性,磁性悬浮体保持持续转动的运动状态,由此实现了磁性悬浮体的转动.
驱动部分2主要由滑轨N、电磁铁L5、电动机m、顺逆开关S和稳压电源V5~V6组成. 驱动部分2利用电动机驱动原理,通过顺逆开关实现滑轨上电磁铁的正反转. 通电空心线圈在运动过程中产生变化的磁场,在变化磁场的作用下,磁性悬浮体表面会产生感应电动势,铁质磁性悬浮体表面会形成磁化电流,磁化电流与变化的磁场相互作用,会产生电磁推力,使磁性悬浮体与电磁铁之间产生相对旋转运动.
为使磁性悬浮体以不同角速度旋转,设计以下2种操作方式:
1)固定电磁铁两端电压,改变电磁铁的起始作用位置. 当电磁铁两端电压一定时,通过改变电磁铁的起始作用位置,改变电磁铁与磁性悬浮体相互作用的时间,实现磁性悬浮体旋转角速度的变化.
2)固定电磁铁的起始作用位置,改变滑轨电压. 当电磁铁的起始作用位置一定时,通过改变可调稳压电源V6的电压,改变滑轨电压,实现磁性悬浮体旋转角速度的变化,从而实现对磁性悬浮体转动状态的控制.
1.4 制动部分
制动部分主要由电磁铁L4和可调稳压电源V4组成. 接通电磁铁L4的电源时,电磁铁L4形成其特有的磁场分布,旋转的磁性悬浮体受到相反旋转力矩的作用,同时磁性悬浮体受到向上的分力,产生向上的微小位移,因此磁性悬浮体发生由旋转到摆动再到静止的状态变化. 关闭制动部分的电源后,磁性悬浮体恢复稳定悬浮的状态.
2 演示仪的制作方法
1)用1 cm厚的木板制成26 cm×15 cm×30 cm演示仪的主体框架,如图1所示,其主体是上下2层的空心长方体框架. 框架上层高度为25 cm,下层高度为5 cm,为了便于观察实验现象,将框架上层切掉7 cm宽.
2)按照实验原理焊接电路板,并将其置于框架下层.
3)在框架顶部的中央位置固定线性霍尔传感器ss495a,将电磁铁L1放在霍尔传感器正上方,连接电磁铁L1与电路板,组成主控制电路部分.
4)将电磁铁L2置于框架上层底面中心位置,保证其位于电磁铁L1正下方,将其接入电路,组成副控制电路部分.
5)在上层框架内部两侧水平固定2块2 cm厚的木板,左侧木板与顶层间距10 cm,右侧木板与顶层间距11 cm. 在左右两侧木板上分别放置电磁铁L3和电磁铁L4,用导线将二者接到电路板上相应位置,组成驱动部分1和制动部分.
6)用木条、齿条、齿轮、蜗杆、顺逆开关和电动机制成可双向移动的滑轨,将电磁铁L5固定在滑轨上,组成驱动部分2. 为使该部分达到要求的高度,制作木制支架以做调整.
3 演示仪的使用方法及开展的研究实验
该实验装置可以使一定质量的磁性物体悬浮、转动及制动. 通过改变电磁铁铁芯高度和副控制电路电压等,可使不同质量的磁性悬浮物体在不同位置稳定悬浮;通过改变滑轨上电磁铁的起始作用位置和滑轨电压可以控制磁性悬浮体的旋转速度.
3.1 使一定质量的磁性物质悬浮
磁悬浮转动演示仪的主控制电路部分可以使一定质量的磁性物体稳定悬浮. 电磁铁L1不加铁芯,电路通电,调节直流稳压电源,使得其输出电压为20.0 V. 然后调节滑动变阻器,使得其输出电压为3.0 V,将磁性物质的N极靠近距离线性霍尔传感器约2.00 cm的位置,实现磁性物体的稳定悬浮.
3.2 铁芯的高度与磁性悬浮体质量的关系
主控制电路部分使磁性物体稳定悬浮时,磁性悬浮体的质量与电磁铁L1内铁芯的高度如表1所示.
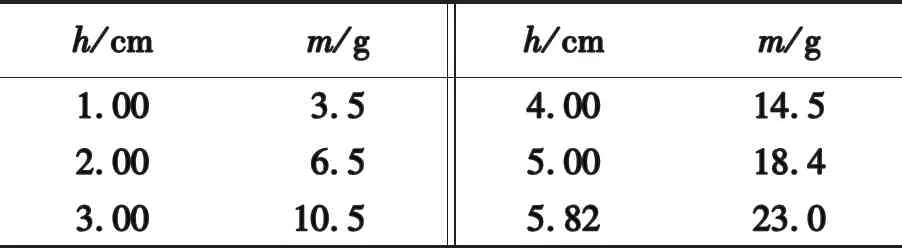
表1 电磁铁L1内铁芯的高度h与磁性悬浮体质量m
由此可见,改变电磁铁内铁芯的高度可实现不同质量磁性悬浮体的稳定悬浮.
3.3 电磁铁与传感器间距离与磁性悬浮体质量的关系
加副控制电路,在电磁铁L2两端电压恒定(以20.2 V为例)的情况下,通过改变电磁铁L2与线性霍尔传感器之间的距离,可以实现不同质量磁性悬浮体的稳定悬浮. 磁性悬浮体的质量与电磁铁L2与线性霍尔传感器之间的距离如表2所示.
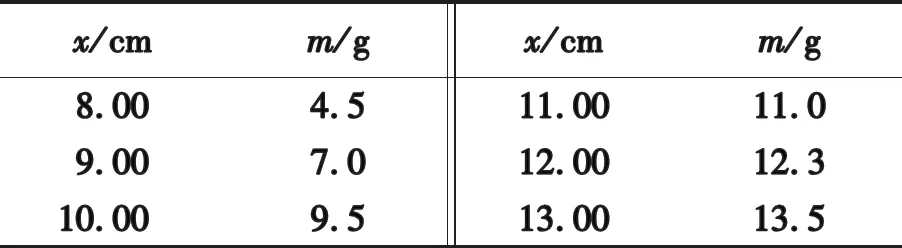
表2 电磁铁L2和传感器间的距离x与磁性悬浮体的质量m
3.4 电磁铁电压与磁性悬浮体质量的关系
在电磁铁L2与线性霍尔传感器之间的距离恒定(以6.50 cm为例)时,改变电磁铁L2两端的电压,可实现不同质量磁性悬浮体的稳定悬浮. 电磁铁L2两端的电压与磁性悬浮体的质量如表3所示.

表3 电磁铁L2两端的电压UL2与磁性悬浮体质量m
可见,当电磁铁给磁性悬浮体以斥力时,磁性悬浮体的质量随电磁铁L2两端电压的增大而减小,即随电磁铁磁力的增大而减小,这与理论分析一致.
3.5 驱动部分1磁性悬浮体稳定旋转对应电磁铁的最佳电压
经过多次实验,调节电磁铁的位置,仔细观察实验现象,当驱动部分1中电磁铁L3所加电压为15.0 V时,磁性悬浮体旋转最为稳定.
3.6 电磁铁起始作用位置与磁性悬浮体转速的关系
在驱动部分2电压恒定(以11.0 V为例)时,改变电磁铁的起始作用位置,磁性悬浮体转速与电磁铁起始作用位置如表4所示.
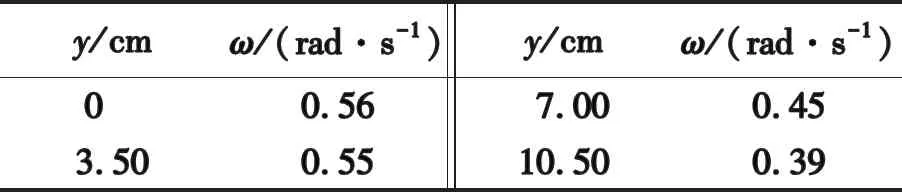
表4 电磁铁起始作用位置y与磁性悬浮体转速ω
可见,距参考点距离为0与距离为3.50 cm时磁性悬浮体的转速几乎相同,这与理论分析一致,2种作用方式中电磁铁与磁性悬浮体相互作用时间相同,即可得这2种位置为等效位置,转速相同. 当距离参考点位置越大时,转速越小,这与理论分析一致.
3.7 滑轨电压与磁性悬浮体转速的关系
在与参考点距离(以3.50 cm为例)一定时,通过改变可调稳压电源V6,进而改变滑轨两端电压,磁性悬浮体转速与滑轨电压如表5所示. 可见,当电磁铁作用的位置恒定时,滑轨两端电压越大,滑轨的速度越大,与磁性悬浮体作用的时间越短,磁性悬浮体的转速越小.
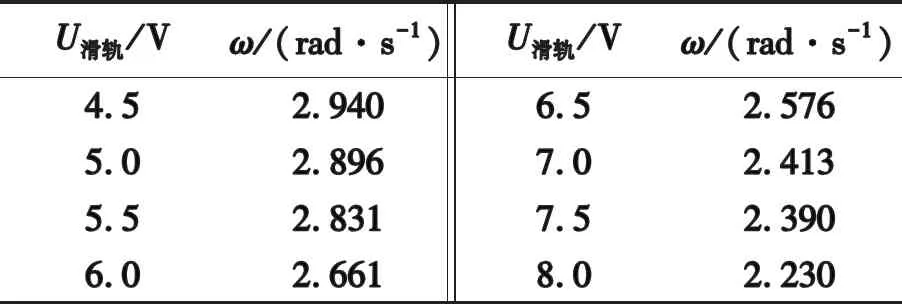
表5 滑轨电压与磁性悬浮体转速
在实验装置中,利用副控制电路通过改变磁性悬浮体与电磁铁L1的距离或电压,解决了因主控制电路电子元件的限制而导致磁性悬浮体质量以及悬浮位置范围有限的难题. 通过改变驱动部分滑轨上电磁铁的起始作用位置及滑轨电压,实现了磁性悬浮体不同角速度的旋转. 制动部分使悬浮体的旋转达到可控制的目的.
4 结束语
设计并制作了磁悬浮转动演示仪,研究了磁性悬浮体质量与铁芯在电磁铁内的高度、电磁铁电压及电磁铁与传感器间距离的关系. 通过分析磁性悬浮体转动的角速度与滑轨上电磁铁起始作用位置、滑轨两端电压和电磁铁的外磁场间的关系,得到了控制磁性悬浮体转动和制动的方法. 演示仪结构简单、可操控性强,能够准确直观地展现磁性悬浮体的悬浮和转动等现象,可应用于课堂教学,并可以此为载体对磁悬浮现象进行更深入的研究.