工业机器人在礼品盒分拣系统中的应用
2019-04-24王涛
王 涛
(山东工业职业学院,山东 淄博 256414)
随着科技的发展,工业机器人在各个领域中的应用越来越广泛。以工业机器人为基础的礼品盒自动分拣系统代替了人工礼品盒的分拣,自动化程度大大提高了,生产效率明显提高。
1 礼品盒分拣系统的构建
以工业机器人为基础的礼品盒自动分拣系统主要由汇博工业机器人、信捷相机、盛有礼品盒的托盘运送流水线组成。托盘流水线静止时,把不同的礼品盒放在流水线拍照位置,由相机拍照获取礼品盒的模板数据信息。启动流水线上料,当礼品盒经过拍照位置时,相机拍照获取礼品盒信息并与模板礼品盒信息相互比较,把最终数据传递给S7-1200PLC,数据经PLC处理后送给工业机器人,由工业机器人完成礼品盒的抓取,当托盘中的礼品盒清空后,机器人抓取托盘放到回收处。礼品盒分拣系统图如图1所示。
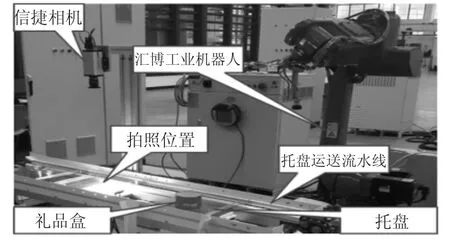
图1 礼品盒分拣系统
2 工业机器人硬件
系统选用6轴汇博工业机器人,型号是HR20-1700-C10,其主要参数如表1所示。
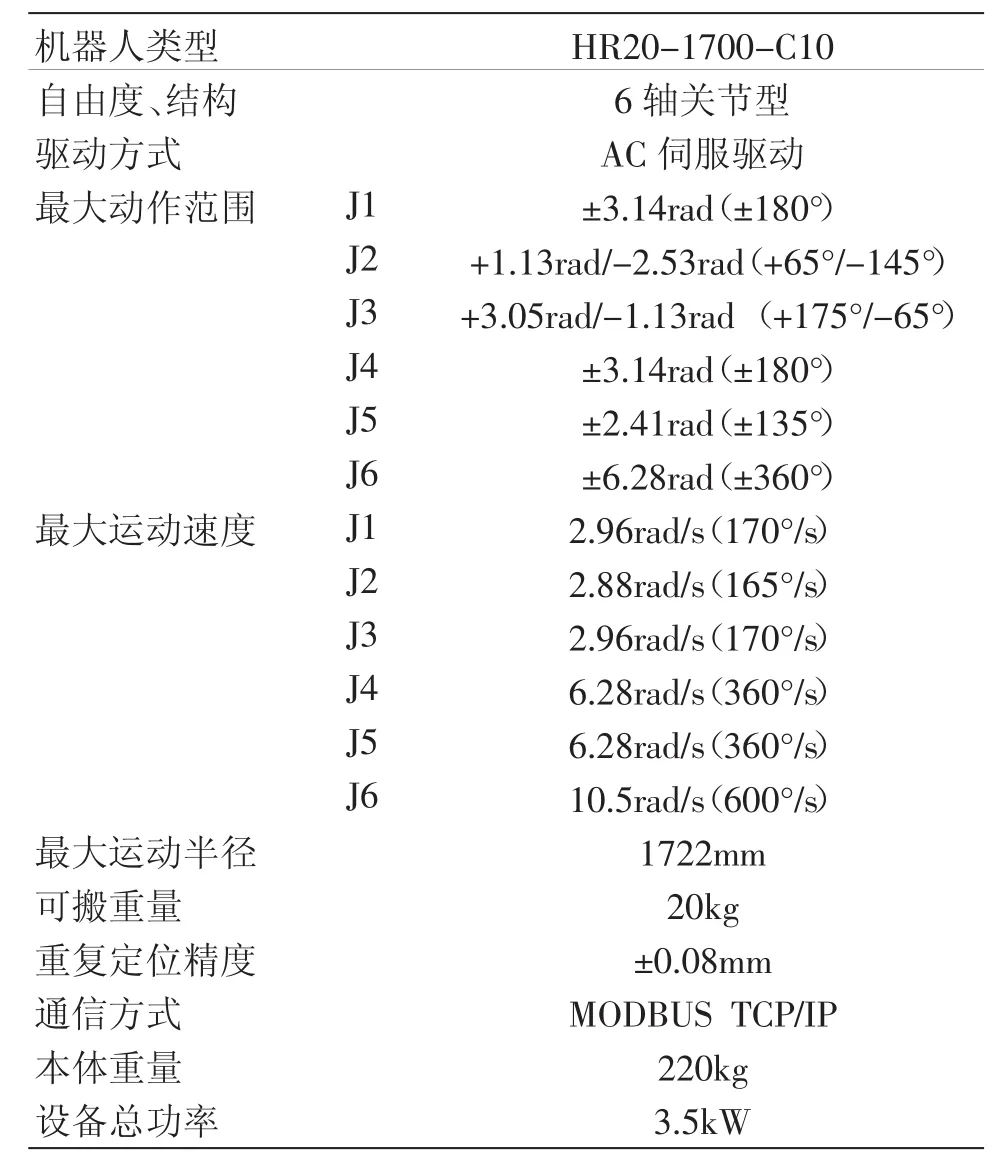
表1 机器人参数
要实现机器人对礼品盒和托盘的抓取,必须在机器人的J6轴(即机器人末端)安装相应的端拾器,根据实际需要,端拾器由单吸盘(完成礼品盒的抓取)和双吸盘(完成空托盘的抓取)构成,端拾器如图2所示。

图2 端拾器
3 工业机器人软件
机器人的程序编写、运动、状态查看、示教等功能都是通过手持示教器完成。汇博HR20-1700-C10型机器人采用的示教器是KeTop,KeTop是KEBA公司专门为工业机器人手持终端提供的硬件解决方案,该手持终端运行KEBA公司自主研发的人机界面软件TeachView。示教器按键如图3所示。

图3 示教器按键
礼品盒抓取子程序如下:
PICK //礼品盒抓取子程序
PTP(xipan_tool_pos)//切换到礼品盒抓取工具位置
Tool(xipan_tool)//切换到礼品盒抓取工具坐标系
WaitIsFinished()//等待完成
//Lin(inipoint)//抓取坐标偏移基准点(不参与实际动作)
Pickpot:=inipoint//抓取点赋值
Pickpot.x:=inipoint.x-dx_pick//抓取点X轴偏移计算
Pickpot.y:=inipoint.y-dy_pick-laser_offset//抓取点Y轴偏移计算
Pickpot.z:=inipoint.z+dz_pick+100//抓取点 Z 轴偏移计算(增加100mm作为准备点
Wait Is Finished() //等待完成
Lin(pickpot)// 以直线方式运行到抓取准备点
Wait Is Finished() //等待完成
pickpot.z:=pickpot.z-100//减少 100mm 到抓取点
Wait Is Finished() //等待完成
Lin(pickpot,lin300)//以 300cm/min 的速度运行到抓取点
Wait Is Finished() //等待完成
dout24.Set(TRUE)//真空打开
dout26.Set(TRUE)//单吸盘打开
Wait Time(2000) //延时 2 秒
Wait Is Finished() //等待完成
IF xiqu_status.val=TRUE THEN//如果真空检测为TRUE
pickpot.z :=pickpot.z+100//上升 100mm作为退出点
Wait Is Finished() //等待完成
Lin(pickpot) //运动到退出位置
ELSIF xiqu_status.val=FALSE THEN//如果真空检测为FALSE
status_robot.val :=300//机器人状态:300=吸取错误
PAUSE//暂停
END_IF
4 结 语
实践证明,以工业机器人代替人工分拣礼品盒后,提高了生产效率,节约了人工成本。
